
A INTERPOLATION-BASED APPROACH TO MOTION
GENERATION FOR HUMANOID ROBOTS
Koshiro Noritake, Shohei Kato and Hidenori Itoh
Dept. of Intelligence and Computer Science
Nagoya Institute of Technology
Gokiso-cho, Showa-ku, Nagoya 466-8555, Japan
Keywords:
Humanoid robot, motion generation, Tai Chi Chuan, balance checking.
Abstract:
This paper proposes a static posture based motion generation system for humanoid robots. The system gener-
ates a sequence of motion from given several postures, and the motion is smooth and stable in the balance. We
have produced all the motions of Tai Chi Chuan by the system. Motion generation for humanoids has been
studied mainly based on the dynamics. Dynamic based method has, however, some defects: e.g., numerous
parameters which can not be always prepared, expensive computational cost and no guarantee that the motions
are stable in balance. We have, thus, studied less dependent-on-dynamics approach. A motion is described as
a sequence of postures. Our system figure out if we need extra postures to insert for stability. This method
enables humanoid robot, HOAP-1 to do Tai Chi Chuan.
1 INTRODUCTION
In recent years, robotics has greatly developed, es-
pecially, research for humanoid robots has attracted
much attention (e.g,(Nishiwaki et al., 2002), (Sug-
ihara et al., 2002), (Huang et al., 2001), (Yam-
aguchi et al., 1993), (Li et al., 1993), (Kagami et al.,
2001), (Kuffner et al., 2001), (Kuffner et al., 2002),
(Kuwayama et al., 2003)). Existing methods of mo-
tion generation for humanoid robots are mostly based
on the dynamic control theory and the optimization
technique. These methods are often specialized in
some particular motions, such as walk and standing,
which are simple, symmetric or cyclic. This presents
an obstacle to general-purpose. These methods may
require the mastery of dynamic for use. The method-
ologies based on the dynamics often require highly
expensive computational cost, and the motion control
for unconstraint motions is still hard problem. Me-
chanical characteristic of humanoid robot is an in-
crease in DOFs. There is, however, few studies for
motion control such that the DOFs are fully utilized.
In this research, we, thus, take an intelligent soft-
ware approach to motion control with useful interface
and application for various motions. In this paper,
we propose a motion generation system for humanoid
robots. Our system generates a sequence of motion
from given several postures, and the motion is smooth
and stable in the balance.
We have produced all the motions of Tai Chi Chuan
by the system. All motions have been performed by a
humanoid robot.
2 HUMANOID ROBOT AND THE
TARGET MOTIONS
2.1 Humanoid Robot
In this paper, we consider the motion control of a hu-
manoid robot, HOAP-1 (Humanoid for Open Archi-
tecture Platform) produced by Fujitsu(Murase et al.,
2001), shown in Figure 1. The total weight is 6 (kg)
and the height is 48 (cm). HOAP-1 has 20 DOFs
in total, 6 in each leg and 4 in each arm. The link
structure is shown in Figure 2. The sensor architec-
ture of HOAP-1 is consisted of 4 pressure sensors on
each sole and angular rate and acceleration sensors
mounted in breast. HOAP-1 is controlled with RT-
Linux OS on itself or computer connected with USB.
2.2 Tai Chi Chuan
We consider Tai Chi Chuan as the target motion for
humanoid robots. Tai chi has several styles. In this
paper, we adopted Tai Chi 48. Tai Chi motions have
various movement of entire body. Tai Chi motions are
41
Noritake K., Kato S. and Itoh H. (2004).
A INTERPOLATION-BASED APPROACH TO MOTION GENERATION FOR HUMANOID ROBOTS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 41-47
DOI: 10.5220/0001143100410047
Copyright
c
SciTePress

Output: Sequence of Motions
Balance-Checker
Motion-Generator
Input: Postures
smooth interpolation
Figure 3: Data flow in our motion generation system.
Figure 1: HOAP-1.
Figure 2: The link
structure of HOAP-1.
performed slowly, softly and with smooth and even
transitions between them. Tai Chi motions require
sophisticated balance control for robots. In addition
to stability or energy consumption, Tai Chi Chuan re-
quires concinnous forms. Unlike to walking, Tai Chi
motions should not be changed markedly in appear-
ance even for the stability.
3 MOTION GENERATION
SYSTEM
3.1 Interpolation-based Motion
Generation
The section describes a motion generation system
for humanoid robots. Figure 3 shows the out-
line of the system. Input to the system is a se-
quence of postures P = P
0
, P
1
, · · · , P
n
, (called
key-postures
). Each key-posture has characteristic
form of a motion to generate. In this system, we
suppose that each key-posture is statically stable in
balance. This supposition is supported by the key-
posture adjustment, such that the center of mass
(COM) of the upper body is positioned just above
the ankle of the supporting leg. Output from the
system is a motion sequence M = M
0
, M
0
, · · · ,
M
m
.
The basic function of motion generation is the
smooth interpolation between two postures, P
i
and
P
i+1
. The interpolated motions, needless to say,
should be stable in balance for humanoid robots.
Bal-
ance Checker
evaluates the distance between P
i
and
P
i+1
in balance space, and then, inserts a few inter-
mediate postures (corresponding to A
i
j
in Figure 3) if
the distance is over a threshold. It is, in general, dif-
ficult to calculate the distance of postures in balance
space. We have, thus, made a rough approximation
described in the following section.
3.2 Classification of the Postures in
Balance Space
Tai Chi Chuan, our target motion, has wide variation
in posture. Interpolation-based motion generation is,
however, vulnerable to wide or quick variation in pos-
tures. It is, thus, important to consider some relation
between two postures to be interpolated. The admissi-
bility of the interpolated motion may be estimated by
the relation. In this research, we consider the distance
in balance space as the admissibility.
To calculate the distance of postures in balance
space is hard problem. In this research, we give this
problem an audacious consideration that postures of
Tai Chi motion are classified into 13 groups (
posture
ICINCO 2004 - ROBOTICS AND AUTOMATION
42
1
2
3
4
5 6
7
8
13
9
10
11
12
Right Leg Standing
Both Leg Standing
Height of Tue
of Idling Leg
(1~4, 10~13)
High
Low
Height of COM
((5, 6, 9), 7, 8)
High
Low
Right Foot
Position of COM
(5, 6, 9)
Left Foot
Left Leg Standing
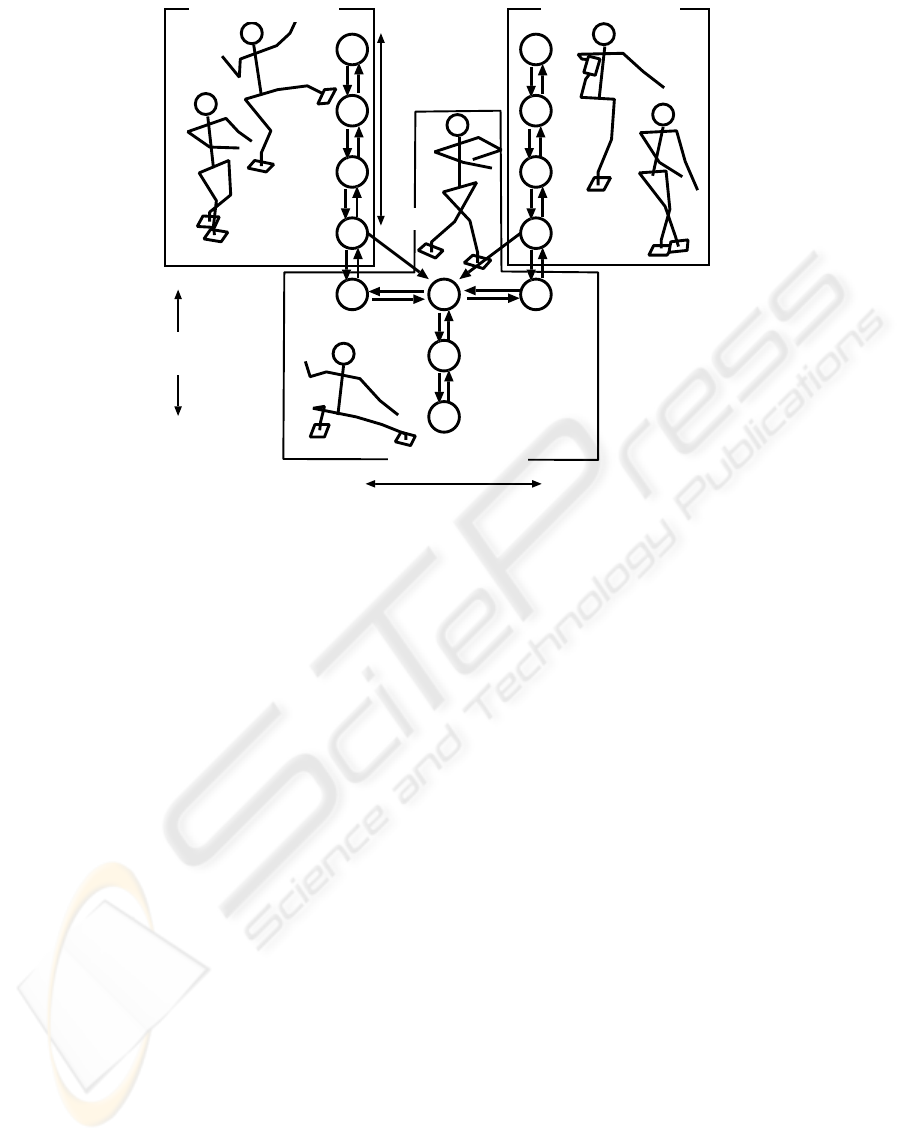
Figure 4: The directed graph of 13 posture classes.
class
, or simply
class
) and these groups are connected
by 26 arcs in the balance space. The balance space
is represented by a directed graph shown in Figure 4.
The classification is based on the relative position of
COM and the relation of the supporting and idling
legs. Firstly, postures are classified into three classes:
both leg standing, right leg standing and left leg stand-
ing. Single leg standing is classified into four classes
according to the height of the idling leg in relation to
the supporting leg (see Figure 4):
• lower than the ankle (#4 and #10),
• higher or equal than the ankle and lower than the
knee (#3 and #11),
• higher or equal than the knee and lower than the hip
(#2 and #12),
• higher or equal than the hip (#1 and #13).
Both leg standing is classified into five classes accord-
ing to the position of the COM in relation to the COM
of the erect posture (see Figure 4):
• the vertical component is less than 80% (#8),
• the vertical component is more or equal than 80%
and less than 90% (#7),
• the vertical component is more or equal than 90%
and,
– the horizontal component leans to right more
than 20% (#5),
– the horizontal component leans to left more than
20% (#9),
– the horizontal component is within 20% from the
center of the both feet (#6).
The classification enables our system to approxi-
mate the distance of two postures. Let a and b be
arbitrary postures to be interpolated, and let g
a
to g
b
be the classes which a and b belong to, respectively.
The distance between a and b is given by the distance
between g
a
and g
b
: the length of the path from g
a
to
g
b
. We, therefore, can estimate the admissibility of
the interpolated motion from a to b by the distance
between g
a
and g
b
.
The balance checker in our system utilizes the di-
rected graph in Figure 4 for the decision to insert an
intermediate posture or not. The directed graph give
a constraint for the stability in balance on the motion
generator. The constraint is that two postures to be in-
terpolated should belong to one class or adjoining two
classes. For example, interpolation from a posture in
class #6 to a posture in class #4 has the risk of tum-
ble. A posture in class #5 should be inserted between
them.
A INTERPOLATION-BASED APPROACH TO MOTION GENERATION FOR HUMANOID ROBOTS
43
11
12
13
14
15
16
17
18
19
20
1
2
3
4
5
6
9
10
8
7
6 9
10
6
5
4
3
4
6
9
9 6 7 6
6
6 5
4
6 6
(collision)
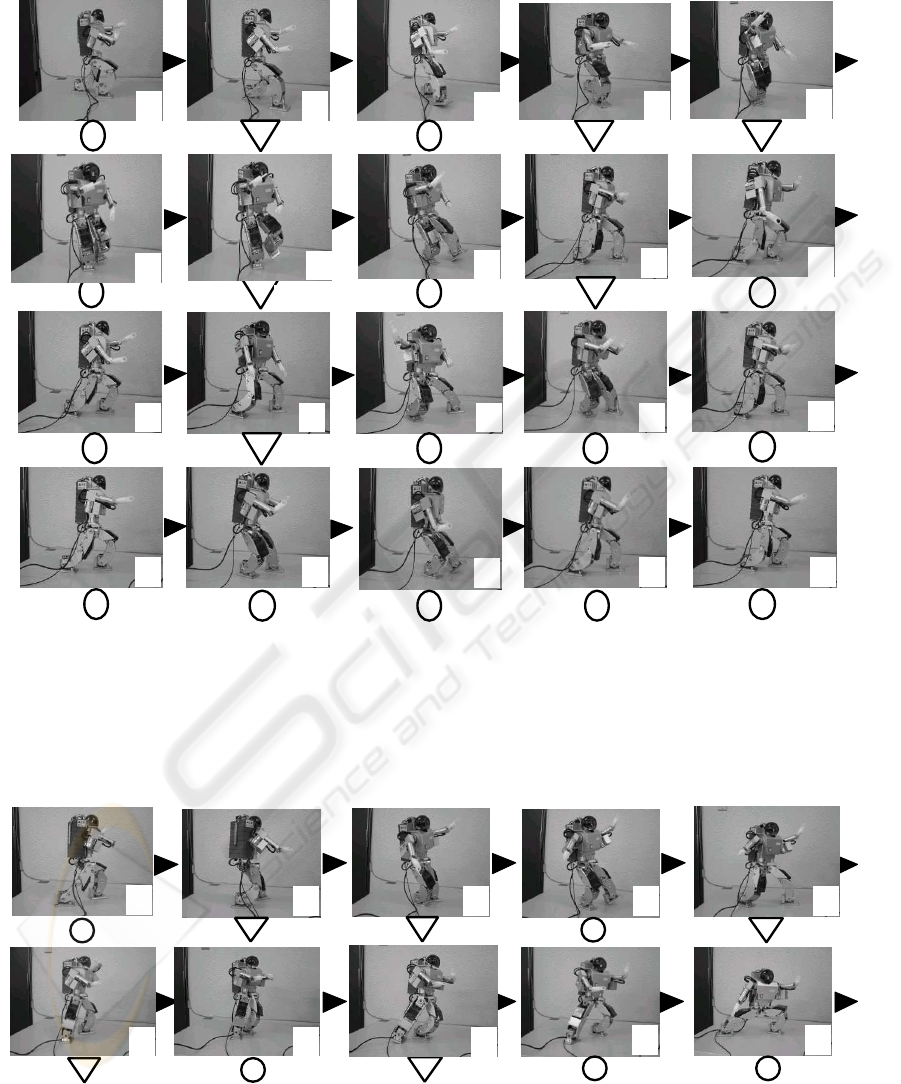
Figure 5: The snapshot of Tai Chi #7 motion by HOAP-1.
1
2
3
4
5
6
7
8
9
10
9
4 5 6 6
9 10 6
7 8
Figure 6: The snapshot of Tai Chi #17 motion by HOAP-1.
ICINCO 2004 - ROBOTICS AND AUTOMATION
44

2
1
3
4
5
6
7
8
9
10
13
11
2 3 4 5 6
9 10 6
9
10
13
11 12
12
Figure 7: The snapshot of Tai Chi #44 motion by HOAP-1.
4 EXPERIMENT
We have produced all the motions of Tai Chi Chuan
without tipping over. Firstly for data input to our
motion generation system, we have prepared key-
postures for 48 Tai Chi motions, from a tutorial book
(Defang, 1999). The system has, secondly, generated
the control sequences of servomotors for all the mo-
tions. In this particular examples, all motions are well
performed by HOAP-1. Table 1 and 2 show the listing
of Tai Chi motions and the numerical relation between
input and output postures by our system.
4.1 Performance Results
Figure 5, 6 and 7 show the snapshots of Tai Chi #07,
#17 and #44 motion by HOAP-1, respectively. Tai
Chi #7 composed of the basic walking motion, called
shang bu
. This is easy one in Tai Chi, however, it oc-
curs tipping over without our system. Tai Chi #17
composed of the motion keeping robot’s head low,
called
pu hu
. This motion HOAP is imbalance in
backward and forward movement. Tai Chi #44, which
contains high kick called
bai lian
, requires high skill
balance control of robot. This is one of the most diffi-
cult motions. HOAP-1 can support its weight with
one leg skillfully, although the imbalance becomes
very high. In these figures, the number in the lower
right of the each snapshot means the class which the
posture belongs to. The transition of classes satisfies
all constraints by the directed graph shown in Fig-
ure 4.
CW
COM
z=0
LeftBottom(Pl,Wl)
RightBottom(Pr,Wr)
Figure 8: Components for balance quantification.
4.2 Effectiveness of Balance Checker
To verify the effectiveness of our system, we have
evaluate the balancing performance for the motions.
In this paper, we suppose the quantity of balance as
follows. Let COM be the center of mass of whole
robot, let COM
z
be the vertical component of COM ,
and let COM
z=0
be the projection of COM on the
floor. Further, let P
l
and P
r
be the position of the
left and right sole, and let W
l
and W
r
be the weight
on the left and right sole, respectively (see Figure 8).
The balance is quantified as the following equation:
imbalance = |COM
z=0
− CW | · COM
z
, (1)
where
CW =
P r · W r + P l · W l
W r + W l
. (2)
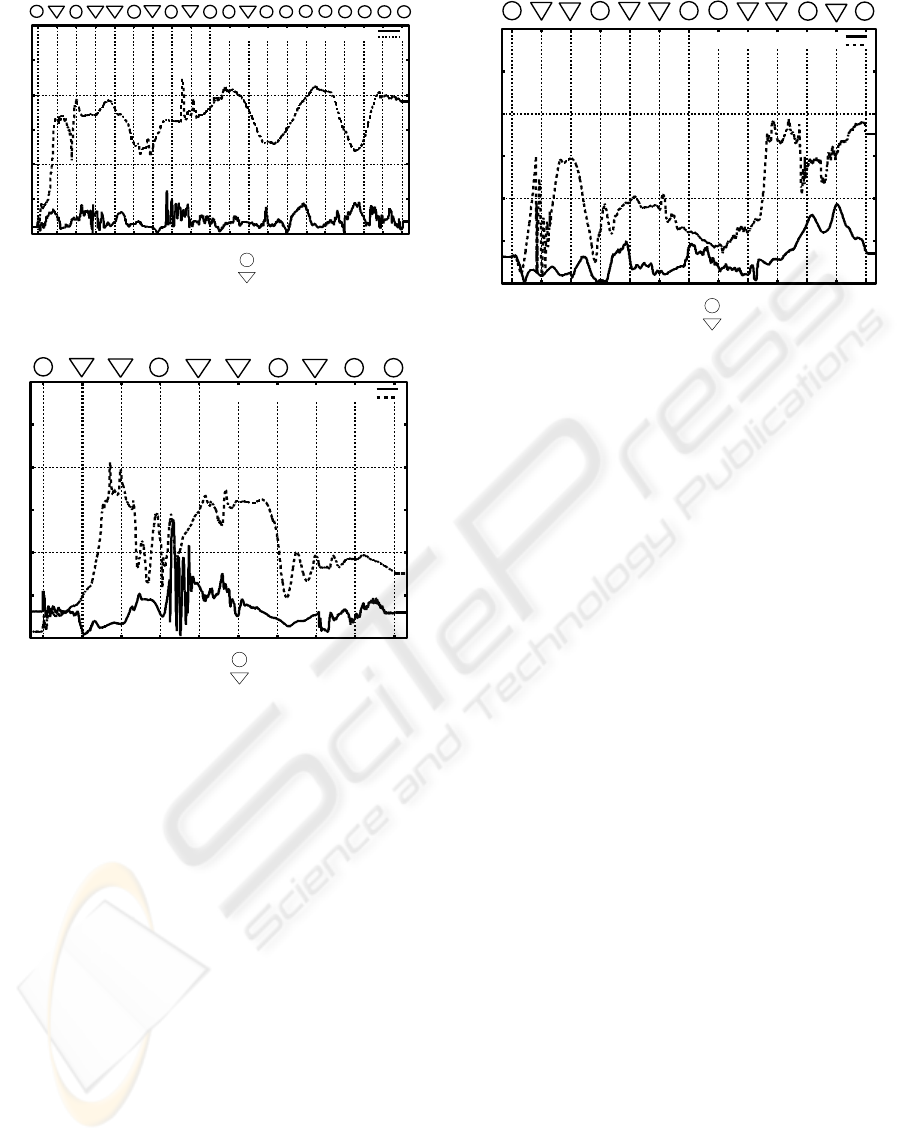
Figure 9, 10 and 11 show the trajectories
imbalance of two Tai Chi by HOAP-1: our method
and without
Balance-Checker
for Tai Chi #7, #17 and
A INTERPOLATION-BASED APPROACH TO MOTION GENERATION FOR HUMANOID ROBOTS
45
Table 1: Key Postures of Tai Chi Generated by Our System
postures postures
# name after by
balance tutorial
checker book
(0) qi shi 4 4
1 bai he liang chi 5 4
2 zuo lou xi ao bu 4 4
3 zuo dan bian 20 10
4 zuo pi pa shi 4 3
5 lu ji shi 26 15
6 zuo ban lan chui 13 7
7 zuo peng lu ji an 19 11
8 xie shen kao 8 4
9 zhou di chui 11 7
10 dao juan gong 29 12
11 zhuan shen tui zhang 18 13
12 you pi pa shi 4 3
13 lou xi zai chui 9 6
14 bai she tu xin 9 6
15 pai jiao fu hu 31 18
16 zuo pie shen chui 11 5
17 chuan quan xia shi 9 4
18 du li cheng zhang 14 6
19 you dan bian 20 10
20 you yun shou 25 12
21 you zuo fen zong 13 7
22 gao tan ma 5 3
23 you deng jiao 10 6
24 shuang feng guan er 5 3
#44 motions, respectively. The result indicates that
our system can generate a stable Tai Chi motion for
HOAP-1, while the robot loses the balance without
our balance checker. In the figures, the numbers over
the graph correspond to the frame labeled the same
number in snapshots shown in Figure 5, 6 and 7. All
motions without balance check tipped over, and after
that, the imbalance is not accurate because sensors are
not calibrated.
5 CONCLUSION
In this paper, we proposed a motion generation sys-
tem for humanoid robot. The motion generated by our
system is smooth and stable in the balance. Humanoid
robot, HOAP-1 with our system has performed whole
48 Tai Chi motions in good balance. Our system per-
forms various and unrestricted motions for humanoid
robots without hard problem in dynamics. Our sys-
tem still has some constraints, that is, platform de-
pendent, interpolation interval, and at least one sole
on the floor.
Table 2: Key Postures of Tai Chi (continued)
postures postures
# name after by
balance tutorial
checker book
25 zuo deng jiao 8 4
26 yan shou liao quan 7 3
27 hai di zhen 6 3
28 shan tong bei 5 2
29 you zuo fen jiao 21 9
30 lou xi ao bu 15 7
31 shang bu qin da 10 4
32 ru feng shi bi 7 4
33 zuo yun shou 25 11
34 you pie hen chui 11 5
35 zuo you chuan suo 33 16
36 tui bu chuan zhang 5 2
37 xu bu ya zhang 6 2
38 du li tuo zhang 2 1
39 ma bu kao 9 3
40 zhuan shen da lu 9 5
41 liao zhang xia shi 11 7
42 shang bu qi xing 4 2
43 du li kua hu 7 4
44 zhuan shen bai lian 12 4
45 wan gong she hu 6 4
46 you ban lan chui 16 7
47 you peng lu ji an 19 11
48 shi zi shou 5 3
(49) shou shi 3 3
The future work will focus on three phases. Firstly,
we will deal with the automatic choreographing the
postures to insert. Secondly, we will dedicate to the
more generalized control of the motion generation.
Especially, it is important to let system free from in-
terpolating interval. Our system often makes motions
sprawly in time-axis. This is caused by our policy
that stability is more important than speed. There
are, however, scenes that speed is important, too. We
will respond to this tradeoff. Thirdly, we will dedi-
cate to some interpolation methods specialized to Tai
Chi Chuan. The value of the Tai Chi motion is not
only stability and speed, but also aesthetic sense and
smoothness of the motions. In this phase, we will
firstly focus on finding ordinality in the rhythm of Tai
Chi Chuan.
ACKNOWLEDGMENT
This work was supported in part by Artificial Intelli-
gence Research Promotion Foundation and Ministry
of Education, Science, Sports and Culture, Grant–in–
Aid for Scientific Research under grant #14780307.
ICINCO 2004 - ROBOTICS AND AUTOMATION
46
3000 6000 9000 12000 15000 18000 21000 24000 27000 30000
0
0.01
0.02
0.03
0.04
0.05
0.06
Tai Chi #7
Tai Chi #7 without balance check
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
time(ms)
imbalance(m^2)
original posture from the Tai Chi tutorial
intermediate posture by balance checker
Figure 9: The imbalance of Tai Chi #7.
0.01
0.02
0.03
0.04
0.05
0.06
3000 4500 6000 7500 9000 10500 12000 13500 15000 16500
Tai Chi #17
Tai Chi #17 without balance check
1 2 3
4
5
6
7
8 9
10
time(ms)
imbalance(m^2)
original posture from the Tai Chi tutorial
intermediate posture by balance checker
Figure 10: The imbalance of Tai Chi #17.
REFERENCES
Defang, L. (1999). Introduction to Tai Chi consist of 48
motions. BAB Japan.
Huang, Q., Yokoi, K., Kajita, S., Kaneko, K., Arai, H., Koy-
achi, N., and Tanie, K. (2001). Planning walking pat-
terns for a biped robot. IEEE Transactions on robotics
and automation, 17(3).
Kagami, S., Kanehiro, F., Tamiya, Y., Inaba, M., and In-
oue, H. (2001). Autobalancer: An online dynamic
balance compensation scheme for humanoid robots.
In Robotics: The Algorithmic Perspective, Workshop
on Algorithmic Foundations on Robotics, pages 329–
340.
Kuffner, J. J., Nishiwaki, K., Kagami, S., Inaba, M., and In-
oue, H. (2001). Motion planning for humanoid robots
under obstacle and dynamic balance constraints. In
Proc. of the IEEE Int’l Conf. on Robotics and Automa-
tion (ICRA’2001), pages 692–698.
Kuffner, J. J., Nishiwaki, K., Kagami, S., Kuniyoshi, Y.,
Inaba, M., and Inoue, H. (2002). Self-collision de-
tection and prevention for humanoid robots. In Proc.
0.01
0.02
0.03
0.04
0.05
0.06
3000 4500 6000 7500 9000 10500 12000 13500 15000 16500 18000 19500 21000
Tai Chi #44
Tai Chi #44 without balance check
1
2
3
4
5 6
7
8
9
10
11
12
13
time(ms)
imbalance(m^2)
original posture from the Tai Chi tutorial
intermediate posture by balance checker
Figure 11: The imbalance of Tai Chi #44.
of the IEEE Int’l Conf. on Robotics and Automation
(ICRA’2002), pages 2265–2270.
Kuwayama, K., Kato, S., Seki, H., Yamakita, T., and Itoh,
H. (2003). Motion control for humanoid robots based
on the concept learning. In Proc. of International Sym-
posium on Micromechatoronics and Human Science,
pages 259–263.
Li, Q., Takanishi, A., and Kato, I. (1993). Learning control
for a biped walking robot with a trunk. In Proc. of
the IEEE/RSJ International Conference on Intelligent
Robot and Systems, page 1771.
Murase, Y., Yasukawa, Y., Sakai, K., and et al. (2001).
Design of a compact humanoid robot as a plat-
form. In Proc. of the 19-th conf. of Robotics
Society of Japan, pages 789–790. (in Japanese),
http://pr.fujitsu.com/en/news/2001/09/10.html.
Nishiwaki, K., Kagami, S., Kuniyoshi, Y., Inaba, M., and
Inoue, H. (2002). Online generation of humanoid
walking motion based on a fast generation method of
motion pattern that follows desired zmp. In Proc. of
the 2002 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 2684–2689.
Sugihara, T., Nakamura, Y., and Inoue, H. (2002). Realtime
humanoid motion generation through zmp manipula-
tion based on inverted pendulum control. In Proc. of
IEEE International Conference on Robotics and Au-
tomation (ICRA2002), volume 2, pages 1404–1409,
Washington D.C., U.S.A.
Yamaguchi, J., Takanishi, A., and Kato, I. (1993). De-
velopment of biped walking robot compensating for
three-axis moment by trunk motion. In Proc. of
the IEEE/RSJ International Conference on Intelligent
Robot and Systems, page 561.
A INTERPOLATION-BASED APPROACH TO MOTION GENERATION FOR HUMANOID ROBOTS
47
