
AUTOMATIC NAVIGATION AMONG MOBILE DTV SERVICES
Chengyuan Peng, Petri Vuorimaa
Telecommunications Software and Multimedia Laboratory,
Department of Compter Science and Engineering,
Helsinki University of Technology,
P.O. Box 5400, FIN-02015, Finland
Keywords: Intelligent user interface, button prediction, automatic navigation, reinforcement learning, exploration
Abstract: Limited number of input buttons on a mobile device, such as mobile phones and PDAs, restricts people’s
access to digital broadcast services. In this paper, we present a reinforcement learning approach to
automatically navigating among services in mobile digital television systems. Our approach uses standard
Q-learning algorithm as a theory basis to predict next button for the user by learning usage patterns from
interaction experiences. We did the experiment using a modified algorithm in test system. The experimental
results demonstrate that the performance is good and the method is feasible and appropriate in practice.
1 INTRODUCTION
Reception of TV programs in moving vehicles, such
as in buses, trains or cars, is only practicable with
digital television, not with the present analogue TV
system. Digital television provides far more robust
TV signals that are far less susceptible to
interference than analogue TV, especially on the
move.
Mobile reception, which is one of the advantages
of the DVB-T (Digital Video Broadcasting-
Terrestrial) broadcasting solution, is defined in DVB
as being the reception of a DVB-T signal while in
motion, using an omni directional antenna situated at
no less than 1.5 meters above the ground level
[Motivate, 2000] [EN 300 744, 2001]. Figure 1
shows one example, which is drawn from EyeTV
[EyeTV 400, 2003].
Among all the parameters which characterize the
service delivered to mobile receivers, the speed of
the mobile, corresponding to a given Doppler
frequency value, is considered as the main variable
[Motivate, 2000].
For example, some measurements have
confirmed that 8K mobile DVB-T reception of the
15 Mbit/s mode {8K, 16-QAM (quadrature
amplitude modulation), code rate=1/2, Tg=224 ms (a
guard interval of duration)} is possible in the entire
UHF band with speeds in the range 130-235 km/h
and a carrier-to-noise (C/N) ratio requirement of less
than 18 dB [Pogrzeba, 1999] [Reimers, 1998]. Data
rate for DVB-MHP (DVB-Multimedia Home
Platform) applications provided by DVB-T is
capable of 256 kbps [EN 300 744, 2001]. Therefore,
there is a realistic possibility for high-speed mobile
reception of both television and data services in cars,
buses, trains, etc.
Figure 1: Mobile reception of DTV.
140
Peng C. and Vuorimaa P. (2004).
AUTOMATIC NAVIGATION AMONG MOBILE DTV SERVICES.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 140-145
DOI: 10.5220/0002629501400145
Copyright
c
SciTePress

Digital television will offer a large amount of
digital broadcast data services as well as TV
channels, such as Electronic Program Guide (EPG)
and digital Teletext. People can access digital
television services on the move using their mobile
devices, such as mobile phones and PDAs.
Users are often frustrated in their efforts to
access these services with limited number of input
buttons on their mobile devices. Also some mobile
devices, such as mobile digital television set in a car,
demand less user input. Thus, designing a user
interface with minimum or without user’s
interference is an advantage. It could save user time,
efforts, and frustration.
Our goal is to find an intelligent solution to
create “zero-input” for browsing services. In further
detail, whenever a user switches his or her mobile
digital television sets or is at any state of a TV
service, the system would be able to recommend
next button to be pressed and execute the function
represented by this button automatically for the user
instead of manual browsing if the user does not want
to give his or her own input. And therefore, the
number of buttons pressed in this way can be
significantly reduced.
Here we clear some confusion: the paper is not
the issue of helping novice users or compensating
the original poor user interface, but of resolving the
design by novel learning algorithm. We also argue
that multiple users may not access the same device
to interrupt the agent.
It is very difficult to predict real intentions of a
user because there are no examples to guide agent’s
learning, and also most of the times the interactions
made are stochastic. Interactions are dynamic and
parallel with learning, and demand real-time
reaction. Unexpected button-press recommendation
is unacceptable.
The agent’s learning in this problem heavily
depends on user’s interactions or experiences with
the environment and the changes of the broadcast
environment itself as well. Consequently, we use
experience-based and reinforcement learning
techniques (especially the standard Q-learning
algorithm) in machine learning. In section 3, we will
describe reinforcement learning technique used in
this paper and our approaches.
2 DESIGN OF LEARNING AGENT
The mobile digital television will consist of
estimated tens of TV channels and 800 digital
Teletext pages [Peng, 2002]. Navigation agent in a
mobile device is more personalized toward
individual users’ interests and dynamic user
behavior [Lieberman, 2001]. Every time user presses
a button on a mobile device, that’s an expression of
interest in the subject of the services.
The design goal of learning agent in this paper
was to be able to learn and infer user’s intensions
and interests by tracking interactions (i.e., history
information of user’s behavior) between the user and
the device over the long term and provide
continuous, real-time display of recommendations
for the user. Agent keeps any significant histories of
interaction. Browsing history, after all, is a rich
source of input about the user’s interests
[Lieberman, 2001].
Further goal on the learning agent is concerned
with tracking and understanding users’ patterns of
services browsing. In this paper, a reward function
in Q-learning algorithm is used to match the
behavior of the user in current situation with the past
behaviors whose browsing pattern fits most closely,
and return its predictions.
The agent performs reconnaissance in tracking
user-browsing history to recommend new actions.
This concept is not new in user interface design
[Lieberman, 2001]. Given enough time, the agent
becomes pretty good at predicting which button the
user would be likely to choose next.
This paper presents another concept: What if
there is no or few history information or services are
changing? How the agent deals with this kind of
situation? How to deal with the recommendations
that user might not be interested in? Users might
have many interests and changes over time. Also,
users have a rich browsing history over potentially
many months that can be exploited to better
understand their true interests. Agent finds functions
on a service of interest that the user might overlook
because of the complexity of the service.
The agent designed runs simultaneously with
mobile digital television services. The agent
automates interactions between user and mobile
device. Over time, it learns a pattern of the user’s
interests by recording and analyzing the user’s
browsing activity in real time, and provides a
continuous stream of recommendations.
When the user is actively browsing and attention
is focused on the current service or function, the user
need not to pay any attention to the agent. However,
if the user is unsure where to go next, or dissatisfied
with the current offerings, he or she can glance over
to the recommendation window to look at agent’s
suggestions.
AUTOMATIC NAVIGATION AMONG MOBILE DTV SERVICES
141

3 REINFORCEMENT LEARNING
In this section, we will give a short description of
reinforcement learning, which is adopted in this
paper. Reinforcement learning serves as a
computational approach to automating goal-directed
learning and decision-making for an agent [Sutton,
1998]. Its distinguished feature from other
approaches is learning from direct interaction with
the environment. It has been used by a number of
researchers as a practical computational tool for
constructing autonomous systems that improve
themselves with experiences [Papudesi, 2003].
Reinforcement learning is a kind of unsupervised
learning. Reinforcement learning, especially Q-
learning agent is learning to act, i.e., learning how to
map agent’s states to its actions in order to maximize
a numerical reward signal rather than giving training
information in the form of instructions like in
supervised learning [Sutton, 1998]. A reward
indicates the instinct of an agent and it is usually
programmed by a designer in advance. An agent
learns to associate a value (i.e. value function) with
the execution of actions in different states. A value
function specifies what is good in the long run (i.e.
total expected reward).
Reinforcement learning is also a kind of trial-
and-error learning, in which the central problem is
balancing exploration and exploitation [Dearden,
1998]. That is, in order to obtain a lot of reward, an
agent has to exploit what it already knows in order
to obtain reward, but it has also to explore in order
to make better action selections in the future [Sutton,
1998]. Both model-based and model-free methods
for balancing exploration and exploitation have been
introduced in [Dearden, 1998] [Wiering, 1998].
Our focus in this paper is however not on the
trade-off between exploration and exploitation, but
on exploration, in which we show how the system
recommends actions and how unexpected actions (or
errors) can be reduced by an efficient action
selection strategy. By reasonable exploration, we
can shorten agent’s learning time and solve the
problems in the concept mentioned in section 2.
We also study the problems of collecting useful
experiences and environment changes via
exploration in stochastic environment using reward
functions in Q-learning algorithm.
4 EXPLORATION VIA Q-
LEARNING ALGORITHM
This section gives a short introduction to Q-learning
algorithm and presents our approach based on
model-free method. Model-Free approaches only
require sufficient exploration of the environment to
solve the problem. This is very useful when the
number of states is very large. An outline of Q-
learning algorithm using ε-greedy action selection
method follows [Sutton, 1998]:
(1) Initialize value function
a)Q(s, ;
(2) Choose an action a from the
state s using a policy derived
from Q using ε-greedy method;
(3) Take the action a, observe reward
R and next state s’;
(4) Calculate value function Q by
equation:
a)}Q(s,
)a',Q(s'γmaxα{Ra)Q(s,a)Q(s,
a'
−
+
+
=
(5) s = s’;
(6) Go to step (2);
where
Q : a table of Q-values
a : previous action
s : previous state
s´ : new state that resulted from
the previous action
a´
: action that will produce the
maximum Q value
α : learning rate (0 < α ≤1)
R : reward
γ : discount rate ( 0≤ γ ≤1)
The ε-greedy action selection rule in above
algorithm uses a small probability ε to select an
action with the highest Q value, and to select a
random action otherwise [Wiering, 1998]. In order
for an agent to select an action, it needs to explore it.
Random actions are necessary for exploration;
however, actions selected by random process are
sometimes unexpected in practical system where the
problems are. We change ε-greedy rule at step (2) in
above Q-learning algorithm as follows:
ICEIS 2004 - HUMAN-COMPUTER INTERACTION
142
given a random number rand in each
loop in above algorithm, action a is
selected as following:
⎩
⎨
⎧
≥
<
=
εrandifa
εrandifa
a
p
m
where,
⎩
⎨
⎧
=
action selected randomlya
value-Q highest with actiona
a
r
x
m
⎪
⎩
⎪
⎨
⎧
∉
∈=
trieda)pairsof(s,setsa
trieda)pairsof(s,setsa
controlhumana
a
ts
tt
u
p
where,
a
t
indicates experienced action
a
s
indicates random action
In order to decide action a
m
, we select an action
with maximum Q-value in the Q-table; in case of no
action with maximum Q-value in the Q-table, we
choose an randomly selected action a
r
, otherwise.
Action a
p
is chosen from one of the followings:
user controlled action a
u
; reactive controlled action
a
t
which is used as learning intentions-usage
patterns; or approaching the unknown action in a
s
. S
t
indicates the current state and the set of (s, a) pairs
mean the experienced states and actions, i.e., the set:
{ (s
0
, a
0
), (s
1
, t
1
), … ,
(s
t-2
, a
t-2
), (s
t-1
, a
t-1
) } (1)
The exploration strategy in this way would lead
to free button predictions. Through the exploration,
the system is going towards predicted states and
actions.
There is still a question of whether or not this
approach would scale. For example, user wishes to
deviate or start operating with new behaviors. This
situation can be handled well if we use multi-sensed
description of the agent’s world state and avoid very
impoverished state.
5 EXPERIMENTS
We assume that Markov property does hold in this
problem. Markov property means that transition
probability only depends on the last state and action,
not on the whole history of states and actions
[Sutton, 1998].
The overall learning procedure is that every time
the agent is in a state, it then tries out an action using
the action selection algorithm designed in last
section; after the action is performed, the system
evaluates how successful it was by using a reward
function defined in formula (2).
We also need to define a set of states and actions
together with the reward function and other
parameters, which are key elements of reinforcement
learning, as in the rest of following paragraphs in
this section:
We simplify functions represented by a series of
buttons on a remote control in a mobile device as
individual letters, which are shown in Table 1.
A state is a current summary of what can be
sensed by the agent from the environment. In this
experiment, we represent a state as two parts (there
should have more bits in real system): one as current
TV channel number and another as last action taken.
For example, state 6 N indicates the current state of
the environment is in channel 6 and within EPG
service. Also the actions of the agent taken
determine the next state.
Table 1. A simplified representation of a remote
control buttons.
Code Function Code Function
0-9 Channels Z Red button
T Teletext X Green button
N Navigator/
EPG
C Yellow
button
I Interactive
program
V Blue button
U Up arrow B Back/Exit
button
D Down arrow Q Enter button
L Left arrow R Right arrow
Navigation in this problem means taking actions.
We differentiate between interference actions (user
pressed) and automatically learned actions. Actions
are presented as buttons, which include both channel
keys (0-9) and non-channel keys (the rest of keys in
Table 1).
Q-Learning values are built on a reward scheme.
We need to design a reward algorithm that will
motivate the agent to perform a goal-oriented
behavior. A reward function is quite related to
usability heuristics in this problem. For each action,
a reward is determined according to the current
situation and action taken. For example, it receives a
reward of maximum value if the action is the some,
which the user pressed.
Reward function depends on the tasks. In this
paper, we give the reward function as follows:
AUTOMATIC NAVIGATION AMONG MOBILE DTV SERVICES
143
∑
=
=
N
1k
kk
a)(s,ωa)R(s,
ϕ
(2)
Where N indicates the number of tried (state,
action) pairs (i.e. set (1)), ω
k
is a constant and
depends on action (e.g., user controlled action a
u
has
the biggest reward 0.8, random action a
s
has a
reward 0.6, random action a
p
has a reward 0.3, etc.),
and φ
k
(s, a) is either 1 or 0 and it depends on the
state and action.
The system also keeps a so called “footage” of
interactions (i.e., the history of interaction) that user
ever made (cf. Table 2 and Table 3). These
experiences are used for giving reward evaluation
and more importantly, they are used for learning
usage patterns of the user. During interaction, the
system needs to update history file (cf. Table 2)
online. For example, if there is no channel button in
the history file then the system chooses random
action and the reward would be 0.1.
In order to learn which actions are useful, the
actual Q-values should be calculated and the entire
Q-value table will be saved and used later on.
Basically, we just need to calculate the equation and
give the parameters values used in this experiment,
i.e., explore-rate ε (0.1), discount-rate γ (0.65), and
learning-rate α (0.3).
6 RESULTS
The system keeps a history file of state-action pairs
interacted in the past. Table 2 and Table 3 list a part
of interaction history, which includes both user
pressed and agent learned actions using the
exploration algorithm designed in this paper.
Table 2: A sample of the history of interaction.
9
1
2
3
4
5
6
9 nqddddddbdqdddddb
1 tddddduuuuqd
2
3
4
5
6
7
8
9 ndqzdqzddqxqxdqxddqb
9 idrqbbdddqdbb
9 tdddduuuuqqrrrrrlllldddd
9 tqddddddrddddrdddrddddddrdddddxdqqq
ddddrdd
Table 2 lists some of past interactions. For
example, text stream 1tddddduuuuqd at the ninth
line of Table 2 means that TV channel 1 and its
digital Teletext service were once selected, then five
down and four up buttons were pressed, finally one
enter and up buttons were pressed.
Table 3 lists some actions learned by the agent
from the exploration algorithm using past actions.
For example, text stream 1nddddddddz at the fifth
line of Table 3 means that TV channel one was
selected and agent recommended buttons are
choosing Navigator service, then selecting eight
down buttons, finally selecting red color button on a
remote control.
The results of this evaluation were given by
averaging of ten test runs. The error action rate is
3%, which is less than the expected error rate 5%.
The results were based on the real services used in
our previous experiments [Peng, 2002] in which we
used twelve TV channels and three services, i.e.
digital Teletext, Navigator or EPG, and interactive
services.
Table 3: A sample of interactions and learned actions.
9 ndqzdqzdqzdqzdqzdqzdqzdqz
2
1 tdddddd
8
1 nddddddddz
9 tqzdqz
9 tqzdqzdrbqzdqzdqzd
6 x
7 ubz
2
4
9 tqzdqzdqzdqzdqzdqztqzdqzdqzdqz
1 tddddddddddddqu
5
2
3 nr
1 tdddddddl
1 tddddddddqudddddddddd
9 idq
The two averaged exploration rate curves are
shown in Figure 2 in which the horizontal axis
ICEIS 2004 - HUMAN-COMPUTER INTERACTION
144
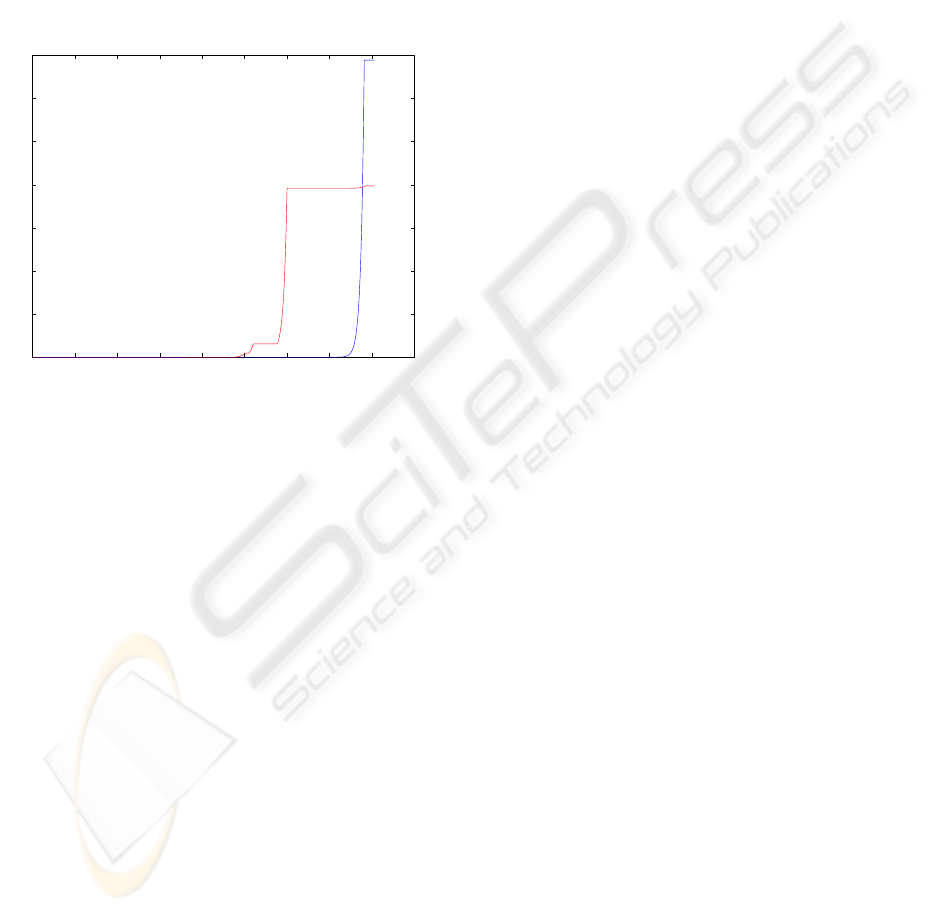
shows the steps of test running and the vertical one
shows the average reward.
The ε-greedy exploration rate curve in Figure 2
used the standard Q-learning algorithm, while
experiment exploration rate curve in Figure 2 used
the algorithm proposed in this paper. The curves
show that the learning rate of proposed exploration
algorithm converges faster than ε-greedy algorithm
in this action selection problem. That is the
experiment algorithm can provide meaningful and
correct actions earlier than the standard ε-greedy
algorithm.
Figure 2: Exploration rate curves.
7 CONCLUSIONS
Through this paper, we highlighted an exploration
algorithm used for automatic button selections in a
mobile digital television system. The results have
shown that this algorithm is feasible and could be a
promising solution to this problem. It can be of
practical values in such a system because the speed
needed to process is in real-time and very little
programming is required.
Also, if the environment changes, e.g. remote
control manufacturer changes, it doesn't need to be
reprogrammed as mentioned earlier. Even if the
services are altered, it does not need to redesign the
learning algorithm. If the learning algorithm is
properly designed, the agent is guaranteed to be able
to find the most efficient policy. These points have
advantages over supervised learning approaches.
The reward function is very important, however
choosing the reward function is hard and may not be
obvious for any given task. Defining a reward
depends on the task and prior knowledge built in the
system.
The learning rate constant α in the Q-learning
equation determines the rate of convergence on the
optimal algorithm. It's important to strike the right
balance between speedy learning and giving the Q-
value history more weight.
Finally, Q-Learning algorithm would really
perform best if the agent could keep track of more
bits in a state. However, this would increase the
number of states that the Q-table would need to keep
track of. This will demand more system memory,
and the memory available in a mobile device is an
important constraint of mobile systems. Another
problem in the algorithm is how to handle errors
when the recommended action is not the expected
one.
REFERENCES
Dearden, R., Friedman N., and Russel, S., 1998. Bayesian
Q-learning. American Association for Artificial
Intelligence (AAAI), pp. 761-768.
EyeTV 400, 2003. Digital video recorder: for digital
terrestrial television (DVB-T), data sheet, available at
http://www.elgato.com.
Lieberman, H., Fry, C., and Weitzman, L., 2001.
Exploring the Web with Reconnaissance Agents.
Communications of the ACM, 44(8), pp. 70-75.
Motivate, 2000. Using DVB-T standard to deliver
broadcast Services to mobile receivers. Report
TM2310, available at http://www.dvb.org/.
Papudesi, V. N., and Huber, M., 2003. Learning from
Reinforcement and Advice Using Composite Reward
Functions. In Proceedings of the 16th International
FLAIRS Conference, St. Augustine, FL, pp. 361-365.
Peng, C., 2002. Digital Television Applications, Doctoral
Dissertation, Helsinki University of Technology Press,
Espoo.
Pogrzeba, P., Burow, R., Faria, G., and Oliphant, A., 1999.
Lab and field tests of mobile applications of DVB-T.
Montreux Symposium '99 Records, pp. 649-656.
Sutton, R. S., and Barto, A.G., 1998. Reinforcement
Learning: An Introduction. The MIT Press,
Cambridge.
Wiering, M., and Schmidhuber, J., 1998. Efficient Model-
based Exploration. In Proceedings of the 5
th
International Conference on Simulation of Adaptive
Behavior: from Animals to Animats 5, Switzerland, pp.
223-228.
EN 300 744, 2001. Digital Video Broadcasting (DVB);
Framing structure, channel coding and modulation for
digital terrestrial television. Specification, European
Telecommunications Standards Institute.
Reimers, U., 1998. Digital Video Broadcasting, IEEE
communications Magazine, pp. 104-110
.
0 50 100 150 200 250 300 350 400 45
0
0
100
200
300
400
500
600
700
Exploration
Reward
e−greedy
experiment
AUTOMATIC NAVIGATION AMONG MOBILE DTV SERVICES
145
