
BLIND TWO-THERMOCOUPLE SENSOR
CHARACTERISATION
Peter C. Hung, Seán F. McLoone
Department of Electronic Engineering, National Unviersity of Ireland Maynooth, Maynooth, Co. Kildare, Ireland
George W. Irwin, Robert J. Kee
Virtual Engineering Centre, Queen’s University Belfast, Belfast, Northern Ireland, BT9 5HN
Keywords: Sensor, system identification, thermocouple, blind deconvolution.
Abstract: Thermocouples are one of the most popular devices for temperature measurement in many mechatronic
implementations. However, large wire diameters are required to withstand harsh environments and
consequently the sensor bandwidth is reduced. This paper describes a novel algorithmic compensation
technique based on blind deconvolution to address this loss of high frequency signal components using the
outputs from two thermocouples. In particular, a cross-relation blind deconvolution for parameter
estimation is proposed. A feature of this approach, unlike previous methods, is that no a priori assumption
is made about the time constant ratio of the two thermocouples. The advantages, including small estimation
variance, are highlighted using results from simulation studies.
1 INTRODUCTION
There is a growing trend towards the integration of
different types of sensors and actuators with
information processing (Isermann, 2005).
Commercial and industrial applications increasingly
demand dynamic temperature measurement when
advanced mechatronic components are incorporated.
In the automotive industry for example, accurate and
reliable measurement of exhaust gas temperature is
required for the regeneration of diesel particulate
filters (DPF), and for the evaluation of the
combustion performance of internal combustion
engines (Kee and Blair, 1994).
Fast response temperature measurement can be
performed using techniques such as Coherent Anti-
Stokes Spectroscopy, Laser-Induced Fluorescence
and Infrared Pyrometry. However, these are
expensive, difficult to calibrate and maintain and are
therefore impractical for wide-scale deployment
outside the laboratory (Hung et al., 2005a).
Thermocouples are widely used for temperature
measurement due to their high permissible working
limit and good linear temperature dependence. In
addition, their low cost, robustness, ease of
installation and reliability means that there are many
situations in which thermocouples are indeed the
only suitable choice. Unfortunately, their design
involves a compromise between robustness and
speed of response which poses major problems when
measuring temperature fluctuations with high
frequency signal components.
To remove the effect of the sensor on the
measured quantity in such conditions, compensation
of the thermocouple measurement is desirable.
Usually, this compensation involves two stages:
thermocouple characterisation followed by
temperature reconstruction. Reconstruction is a
process of restoring the unknown fluid temperature
from thermocouple outputs using either software
techniques or hardware. This paper will concentrate
on the first stage, since effective and reliable
characterisation is essential for achieving
satisfactory temperature reconstruction.
In an attempt to improve existing
characterisation of thermocouples, this paper
proposes a novel technique based on the cross-
relation method (Liu et al., 1993) from the field of
blind deconvolution put forward by Sato (1975).
Compared to other algorithms, simulations suggest
10
C. Hung P., F. McLoone S., W. Irwin G. and J. Kee R. (2007).
BLIND TWO-THERMOCOUPLE SENSOR CHARACTERISATION.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 10-16
DOI: 10.5220/0001627200100016
Copyright
c
SciTePress

that the proposed method gives estimations with
lower variance even in environments with moderate
amount of noise.
This paper is organised as follows: Section 2
introduces the background of two-thermocouple
characterisation. Section 3 proposes the cross-
relation method and shows how it can be applied to
this problem. Simulation results are presented in
Section 4 while conclusions follow in Section 5.
2 DIFFERENCE EQUATION
SENSOR
CHARACTERISATION
2.1 Thermocouple Modelling
Assuming some criteria regarding to the
construction of thermocouples are satisfied (Forney
and Fralick, 1994; Tagawa and Ohta, 1997), a first-
order lag model with time constant
τ
and unity gain
can represent the frequency response of a fine-wire
thermocouple (Petit, 1982). This simplified model
can be written mathematically as
)()()(
fluid
tTtTtT
τ
+=
.
(1)
Here the original fluid temperature
fluid
T can be
reconstructed if
τ
, the thermocouple output )(tT
and its derivative are available. In practice, this
direct approach is infeasible as
)(tT contains noise
and its derivative is difficult to estimate accurately.
More importantly, it is generally not possible to
obtain a reliable a priori estimate of
τ
, related to
their thermocouple bandwidth
B
ω
B
ω
τ
1
=
,
(2)
which, in turn, is a function of thermocouple wire
diameter
d
and fluid velocity
v
3
d
v
B
∝
ω
. (3)
Hence,
τ
varies as a function of operating
conditions. Clearly, a single-thermocouple does not
provide sufficient information for in situ estimation.
Equation (3) highlights the fundamental trade-off
that exists when using thermocouples. Large wire
diameters are usually employed to withstand harsh
environments such as engine combustion systems,
but these results in thermocouples with low
bandwidth, typically
B
ω
< 1 Hz. In these situations
high frequency temperature transients are lost with
the thermocouple output significantly attenuated and
phase-shifted compared to
.
fluid
T Consequently,
appropriate compensation of the thermocouple
measurement is needed to restore the high frequency
fluctuations.
2.2 Two-Thermocouple Sensor
Characterisation
In 1936 Pfriem suggested using two thermocouples
with different time constants to obtain in situ sensor
characterisation. Since then, various thermocouple
compensation techniques incorporating this idea
have been proposed in an attempt to achieve
accurate and robust fluid temperature compensation
(Forney and Fralick, 1994; Tagawa and Ohta, 1997;
Kee et al., 1999; Hung et al., 2003, 2005a, 2005b).
However, the performance of all these algorithms
deteriorates rapidly with increasing noise power, and
many are susceptible to singularities and sensitive to
offsets (Kee et al., 2006). It would be very useful
from the implementation point of view to know
when the characterisations are not reliable.
Some of these two-thermocouple methods rely
on the restrictive assumption that the ratio of the
thermocouple time constants
α
1( <
α
by
definition) is known a priori. Hung et al. (2003,
2005a, 2005b) develop difference equation methods
that do not require any a priori assumption about the
time constant ratio.
The equivalent discrete time representation for
the thermocouple model (2) is:
)1()1()(
fluid
−
+
−
=
kbTkaTkT ,
(4)
where
a
and
b
are difference equation ARX
parameters and
k is the sample instant. The discrete
time equivalent of
α
is defined as
1,
12
<
=
β
β
bb .
(5)
Here subscripts 1 and 2 are used to distinguish
between signals from different thermocouples.
Assuming ZOHs and a sampling interval
s
τ
, the
parameters of the discrete and continuous time
thermocouple models are related by
BLIND TWO-THERMOCOUPLE SENSOR CHARACTERISATION
11
aba
s
−=−= 1,)exp(
τ
τ
.
(6)
Since two sets of (4) are available from each
thermocouple outputs
)(
1
kT and ),(
2
kT a beta
model (Hung,
et al., 2005) can be formulated by
eliminating
fluid
T from (4) to become
1
12212
−
Δ+Δ=Δ
kkk
TbTT
β
,
(7)
where the pseudo-sensor output
k
T
2
Δ and inputs
k
T
1
Δ and
1
12
−
Δ
k
T are defined as
).1()1(
)1()(
)1()(
21
1
12
222
111
−−−=Δ
−−=Δ
−−=Δ
−
kTkTT
kTkTT
kTkTT
k
k
k
(8)
For an
M-sample data set (7) can be expressed in
ARX vector form
XθY =
,
(9)
with
.][and],[,
2
1
1212
Tkkk
b
β
=ΔΔ=Δ=
−
θTTXTY
Here
k
1
TΔ ,
k
2
TΔ and
1
12
−
Δ
k
T are vectors containing
M-1 samples of the corresponding composite signals
k
T
1
Δ ,
k
T
2
Δ and
1
12
−
Δ
k
T .
Due to the form of the composite input and
output signals, the noise terms in the
X and Y data
blocks are no longer independent. The result is that
conventional least-squares and total least-squares
both generate biased parameter estimates even when
the measurement noise on the thermocouples is
independent. It has been shown that generalised total
least-squares (GTLS) on the other hand, can produce
unbiased parameter estimate
θ
ˆ
that outperforms
other difference equation based methods. One of the
reasons can be traced back to the use of
β
, which
enhanced the model stability during parameter
estimation (McLoone
et al., 2006).
Unfortunately, the
GTLS−
β
approach
occasionally returns unreasonable
θ
ˆ
estimates as
will be illustrated in Section 4. This is caused by the
sensitivity of GTLS to violations in the underlying
theoretical assumptions with composite signals
(Huffel and Vandewalle, 1991), plus ill-conditioning
of the noise correlation matrix. The blind
deconvolution approach is considered here to isolate
these invalid
θ
ˆ
.
3 BLIND SENSOR
CHARACTERISATION
One of the best known deterministic blind
deconvolution approaches is the method of cross-
relation (CR) proposed by Liu
et al. (1993). Such
techniques exploit the information provided by
output measurements from multiple systems of
known structure but unknown parameters, for the
same input signal.
This new approach to characterisation of
thermocouples is completely different from those in
Section 2. As commutation is a fundamental
assumption for the method of cross-relation, the
thermocouple models are both assumed to be linear.
This is reasonably realistic as long as the
thermocouples concerned are used within well-
defined temperature ranges. Nonetheless,
linearisation can easily be carried out using either
the data capture hardware or software, even if the
thermocouple response is nonlinear. Further, the
approach requires constant model parameters,
therefore the fluid flow velocity
v
is assumed to be
constant, such that the two thermocouple time
constants
1
τ
and
2
τ
are time-invariant.
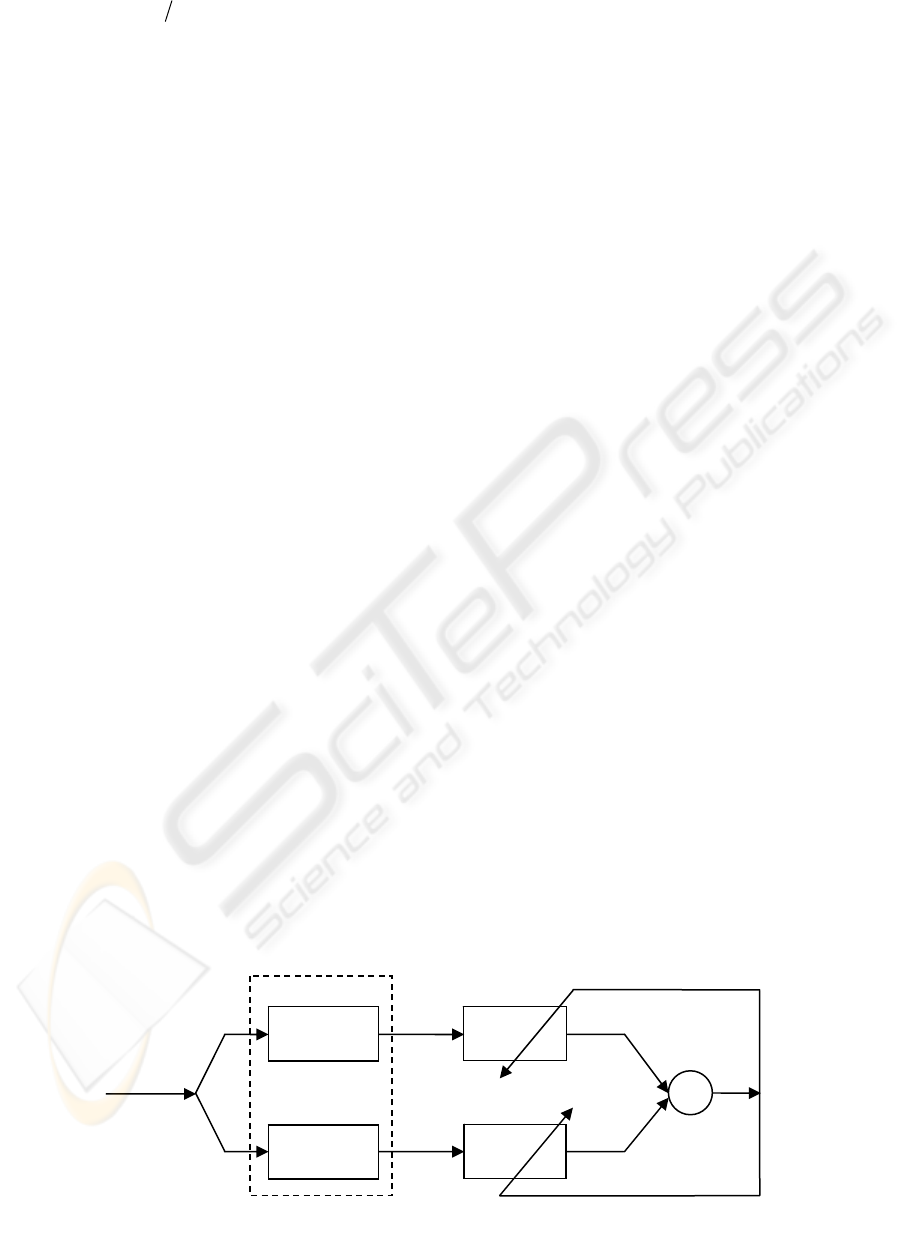
Figure 1: Two-thermocouple cross-relation characterisation.
)(
ˆ
1
sH
e
unknown system
)(
ˆ
2
sH
_
)(
fluid
tT
)(
1
tT
)(
2
tT
)(
12
tT
)(
21
tT
)(
1
sH
)(
2
sH
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
12
3.1 Two-Thermocouple Sensor
Characterisation
By exploiting the commutative relationship between
linear systems, a novel two-themocouple
characterisation scheme is proposed as follows.
Since the fluid temperature
fluid
T is unknown, the
two thermocouple output signals
1
T and
2
T are
passed through two different synthetic
thermocouples as shown in Fig. 1. These are also
modelled by (1) and can be expressed in first-order
transfer function as:
2
2
1
1
ˆ
1
1
)(
ˆ
,
ˆ
1
1
)(
ˆ
ττ
s
sH
s
sH
+
=
+
=
,
(10)
where
H
ˆ
is the estimate of the thermocouple
transfer function
.H
The unknown thermocouple
time constant parameters can then be estimated as
1
ˆ
τ
and
2
ˆ
τ
using the cross-relation method,
illustrated in Fig. 1. Here the cross-relation error
signal,
)()(
2112
tTtTe −= is used to define a mean-
square-error cost function
.
ˆ
,
ˆ
,})]()({[
}{)
ˆ
,
ˆ
(
21
2
2112
2
212
ττ
ττ
∀−=
=
tTtTE
eEJ
(11)
Equation (11) is then minimised with respect to
1
ˆ
τ
and
2
ˆ
τ
to yield the estimates of the unknown
thermocouple time constants. Clearly, the cross-
relation cost function
)
ˆ
,
ˆ
(
212
τ
τ
J is zero when
11
ˆ
τ
τ
= and .
ˆ
22
τ
τ
= In practice it will not be
possible to obtain an exact match between
12
T and
21
T due to measurement noise and other factors such
as thermocouple modelling inaccuracy and
violations of the assumption that the two
thermocouples are experiencing identical
environmental conditions.
Xiu
et al. (1995) suggest that one of the
necessary conditions for multiple finite-impulse-
response channels to be identifiable is that their
transfer function polynomial do not share common
roots. Applying this condition to the two-
thermocouple characterisation problem corresponds
to requiring that the time constants, and hence the
diameters (3), of the thermocouples are different,
that is
2121
dd ≠⇒≠
τ
τ
.
(12)
Not surprsingly, this requirement is consistent with
all other two-thermocouple characterisation
techniques mentioned in Section 2. Thus, cross-
relation deconvolution converts the problem of
sensor characterisation into an optimisation one.
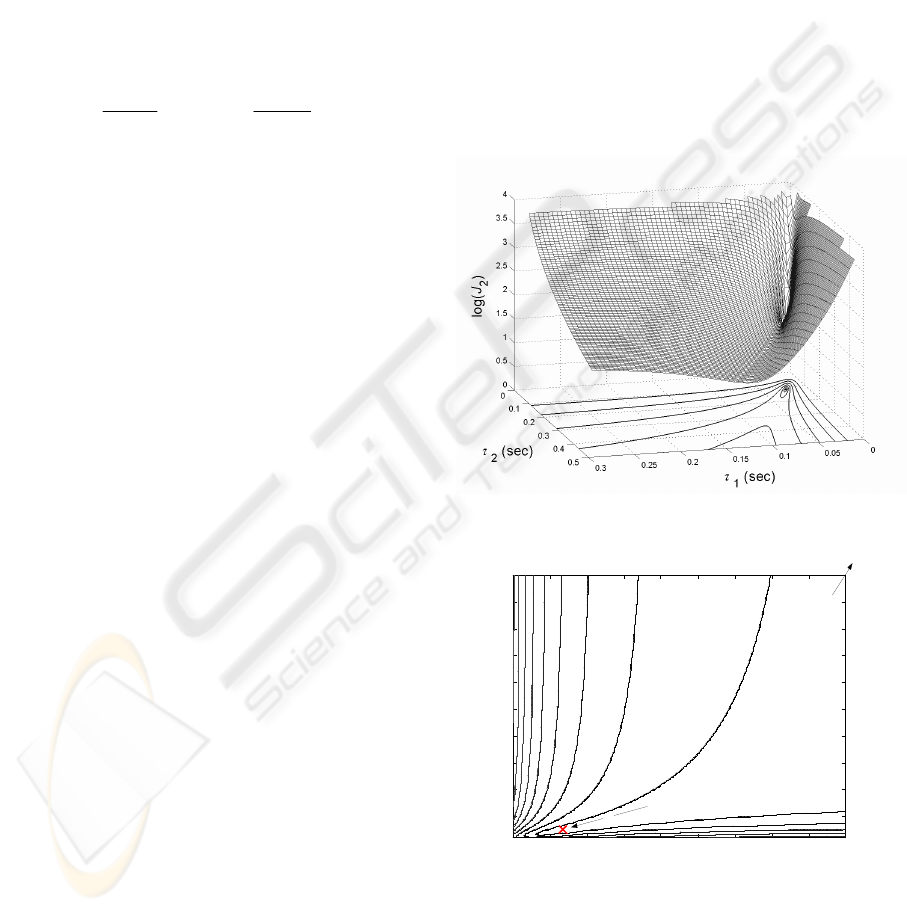
3.2 Cost Function
A 3-D surface plot and a contour map of a typical
)
ˆ
,
ˆ
(
212
τ
τ
J cost function are shown in Figs. 2 and 3.
Unfortunately,
)
ˆ
,
ˆ
(
212
τ
τ
J is not quadratic and
cannot therefore be minimised using linear least-
squares. Fig. 3 shows that the cross-relation cost
function is highly non-quadratic away from the
minimum corresponding to the value of the true time
constants.
Figure 2: Three-dimensional plot of log(J
2
).
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
τ
2
(sec)
τ
1
(sec)
local
minimum
global
minimum
at infinity
Figure 3: Contour plot of J
2
(cross: local minimum).
More importantly, the cost function has a second
minimum when both time constant values approach
infinity. Under these conditions, both low-pass
filters (10) take infinite amounts of time to respond.
BLIND TWO-THERMOCOUPLE SENSOR CHARACTERISATION
13
In other words, they are effectively open-circuited
and their differences will always be zero. The
existence of this minimum applies regardless of the
noise conditions or any violations of the modelling
assumptions. The minimum at infinity is thus in fact
the global minimum, while the true time constant
value is located at a local minimum. In the absence
of noise,
0
2
=J at both the global and local minima.
In addition, the narrow basin of attraction of the
desired local minimum coupled with the global
minimum at infinity has serious implications for
optimisation complexity since search bounds have to
be carefully selected to avoid divergence of gradient
search algorithms to the global minimum.
Consequently, in this study a robust, but inefficient,
grid based search has been adopted to avoid these
issues. To reduce the associated computational load
different step sizes are used for each time constant.
Noting from Fig. 3 that, at least locally,
2
2
1
2
ττ
∂
∂
>
∂
∂
JJ
,
(13)
it can be concluded that the cost function is more
sensitive to changes in the smaller thermocouple
time constant; hence greater accuracy is required in
estimating this value.
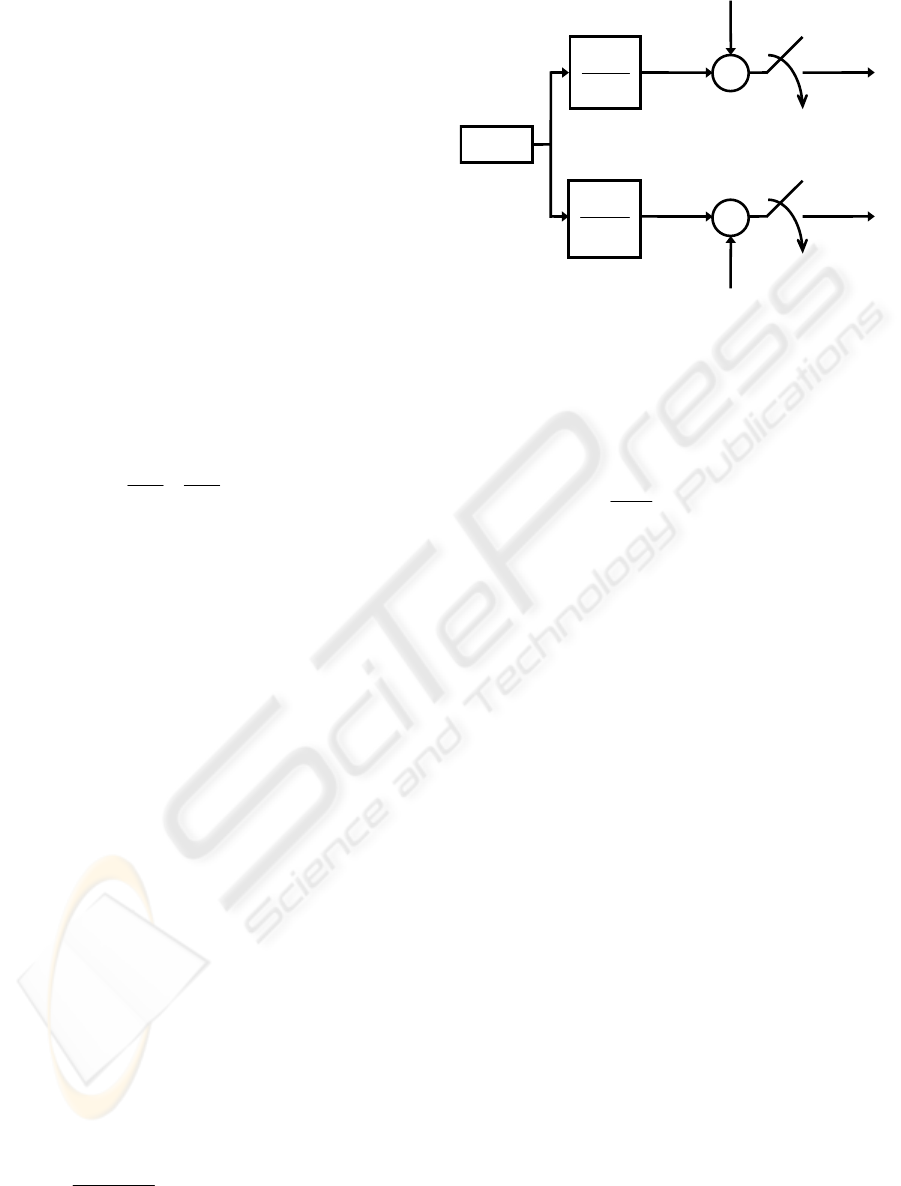
4 SIMULATION RESULTS
A MATLAB® simulation of a two-thermocouple
probe system (Fig. 4) was used to evaluate the
performance of the proposed cross-relation (CR)
blind sensor characterisation. Thermocouples 1 and
2 were modelled as first-order low-pass filters
according to (1) with time constants
8.23
1
=
τ
and
8.116
2
=
τ
ms respectively. The simulated fluid
temperature was varied sinusoidally according to
5.50)20sin(5.16)(
fluid
+= ttT
π
,
(14)
and the resulting temperature measurements sampled
every 2 ms. Each simulation ran for 5 s.
The level of zero-mean white Gaussian
measurement noise added to the thermocouple
signals is described by the noise level
e
L , defined as
,2,1,%100
)var(
)var(
fluid
=⋅= i
T
n
L
i
e
(15)
Figure 4: Simulated two-thermocouple measurement
system.
where
1
n and
2
n are the noises added to the
thermocouples. For a given
e
L , the algorithm
performance was assessed in terms of percentage
estimation errors:
%100
ˆ
⋅
−
=
τ
τ
τ
e .
(16)
To reduce the time required for completing the
simulation, the following search ranges and intervals
(13) were chosen for the cross-relation (CR)
algorithm:
ms. 2.5every at ms;130
ˆ
100
ms, 0.5every at ms;30
ˆ
10
2
1
<<
<<
τ
τ
(17)
Of particular importance was the removal of the
first 1000 data samples before computing
)
ˆ
,
ˆ
(
212
τ
τ
J , using the remaining 1500 sets of CR
outputs
12
T
and
21
T . This was required to eliminate
the effect of transients on parameter estimation
accuracy during each iteration of CR simulation
(Fig. 1). The number of samples removed was
estimated to exceed the 98% settling time for the
system (i.e. five times the largest time constant
2
τ
)
which equated to about 0.6 s or 300 samples.
The resulting means and standard deviations of
the parameter estimation error (16), for both
GTLS
−
β
(Section 2.2) and CR (Section 3.1)
algorithms are shown in Fig. 5. Note results for
2
ˆ
τ
are similar to those illustrated for
1
ˆ
τ
and are thus
omitted.
)(
1
kT
)(
2
kT
s
τ
s
τ
)(
2
tn
+
)(
1
tn
+
)(
1
tT
+
)(
2
tT
+
1
1
1
τ
s+
)(
fluid
tT
2
1
1
τ
s+
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
14
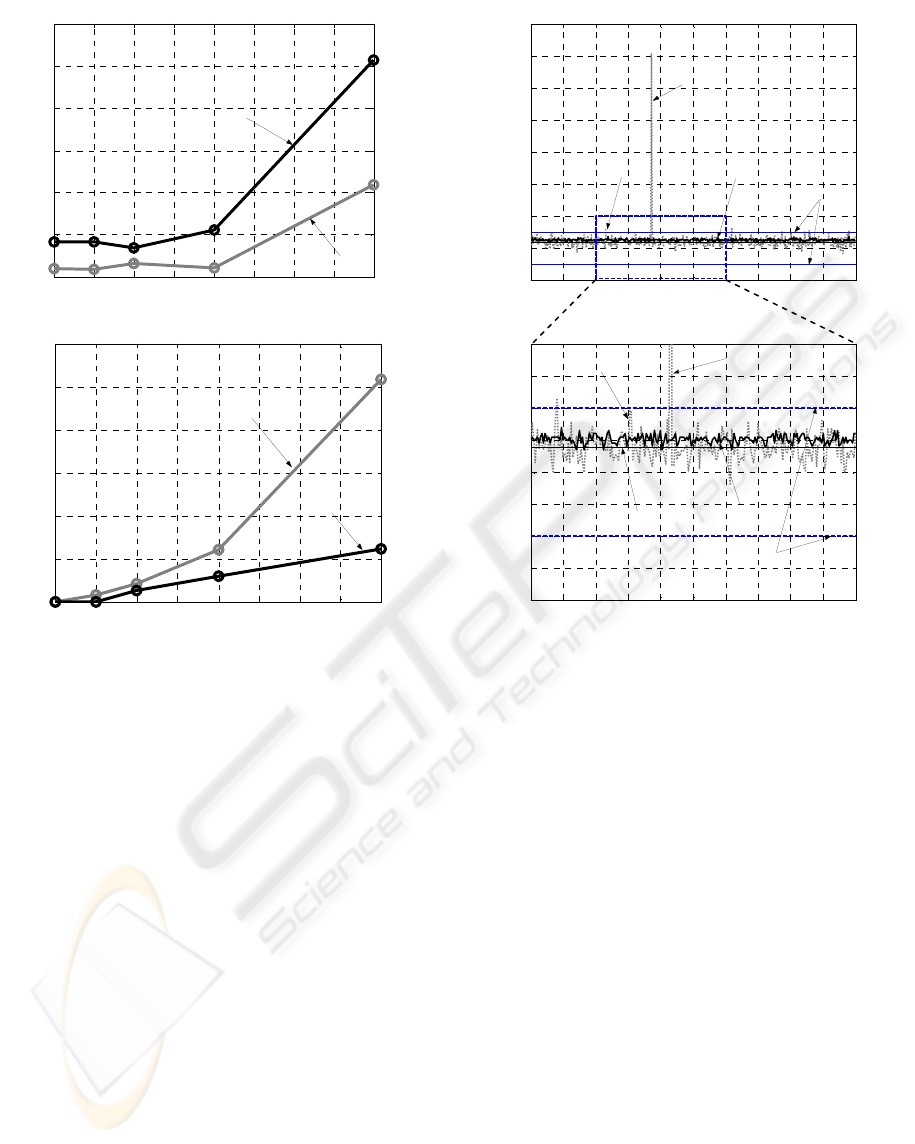
Figure 5: (a) Means and (b) standard deviations of e of
1
ˆ
τ
averaged over 100 Monte-Carlo runs.
These results suggset that CR produces biased
parameter estimates since their expected mean errors
are greater than that of
GTLS−
β
. However, the
estimation standard deviations of CR are less than
that of
GTLS−
β
.
With regard to the search intervals taken for CR,
two issues need to be considered when looking at the
graphs. Firstly, a major contribution to the CR bias
comes from the low resolution of the search grid
used. Since, when
8.23
1
=
τ
ms, an interval of 0.5
ms represents an ‘artificial’ estimation bias of up to
2.1%. This can be reduced if a finer search grid is
employed, at the expense of increasing the already
heavy computation load. Similarly, the CR standard
deviation errors may be 2.1% larger than the
reported values because of the finite resolution
employed, although this is unlikely due to the
intrinsic noise-filtering capability of CR.
The noise-resilient property of CR compared to
GTLS is further highlighted in Fig. 6, where 500
Monte-Carlo simulations were performed. It can be
seen that one unreasonable
1
ˆ
τ
value was returned by
GTLS
−
β
while the CR approach is well-behaved,
although its estimate is asymptotically biased.
Hence, CR can be used to verify whether a GTLS
estimate is genuine or corrupted by signal outliers,
improving the overall reliability of sensor
characterisation.
5 CONCLUSIONS
A novel cross-relation (CR) sensor characterisation
method has been presented. It does not require a
priori knowledge of the thermocouple time constant
ratio
α
, as required in many other characterisation
algorithms. CR is more noise-tolerant in the sense of
reduced parameter estimation variance when
compared to the alternatives such as
GTLS−
β
. The
robustness arises because the CR process involves
passing each thermocouple output through a first-
order block, which removes, at least partially,
Figure 6: 500 Monte-Carlo runs of
1
ˆ
τ
of GTLS−
β
and
CR, where (b) is a magnified version of (a).
0 50 100 150 200 250 300 350 400 450 500
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Monte-Carlo iteration
estimated
τ
1
(sec)
CR
β
-GTLS
unreasonable
β
-GTLS estimate
CR search
range
(a)
100 120 140 160 180 200 220 240 260 280 300
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Monte-Carlo iteration
estimated
τ
1
(sec)
CR
β
-GTLS
unreasonable
β
-GTLS estimate
CR search
range
(b)
true
τ
1
= 0.0238 s
0 0.5 1 1.5 2 2.5 3 3.5 4
0
1
2
3
4
5
6
average error in
τ
1
(%)
L
e
(%)
β
-GTLS
CR
(a)
0 0.5 1 1.5 2 2.5 3 3.5 4
0
2
4
6
8
10
12
SD error in
τ
1
(%)
L
e
(%)
CR
β
-GTLS
(b)
BLIND TWO-THERMOCOUPLE SENSOR CHARACTERISATION
15

measurement noise during identification. As a result,
CR can be employed to verify estimation validity,
thereby increasing the overall reliability of other
characterisation methods.
The computational complexity of CR, due to the
inefficient grid based search used in this study,
means that it is most appropriate for offline sensor
characterisation. Further investigations include ways
to speed up the computation and reduce the
estimation bias.
ACKNOWLEDGEMENTS
The authors wish to acknowledge the financial
support of the Virtual Engineering Centre, Queen’s
University Belfast, http://www.vec.qub.ac.uk.
REFERENCES
Forney, L. J., Fralick G. C., 1994. Two wire
thermocouple: Frequency response in constant flow.
Rev. Sci. Instrum., 65, pp 3252-3257.
Hung, P., McLoone, S., Irwin G., Kee, R., 2003. A Total
Least Squares Approach to Sensor Characterisations.
Proc. 13th IFAC Symposium on Sys. Id., Rotterdam,
The Netherlands, pp 337-342.
Hung, P. C., McLoone, S., Irwin G., Kee, R., 2005a. A
difference equation approach to two-thermocouple
sensor characterisation in constant velocity flow
environments. Rev. Sci. Instrum., 76, Paper No.
024902.
Hung, P. C., McLoone, S., Irwin G., Kee, R., 2005b.
Unbiased thermocouple sensor characterisation in
variable flow environments. Proc. 16th IFAC World
Congress, Prague, Czech Republic.
Isermann, R., 2005. Mechatronic Systems – Innovative
Products with Embedded Control. Proc. 16th IFAC
World Congress, Prague, Czech Republic.
Kee, R. J., Blair, G. P., 1994. Acceleration test method for
a high performance two-stroke racing engine. Proc.
SAE Motorsports Conference, Detroit, MI, Paper No.
942478.
Kee, R. J, O'Reilly, P. G., Fleck, R., McEntee, P. T., 1999.
Measurement of Exhaust Gas Temperature in a High
Performance Two-Stroke Engine. SAE Trans. J.
Engines, 107, Paper No. 983072.
Kee, J. K., Hung, P., Fleck, B., Irwin, G., Kenny, R.,
Gaynor, J., McLoone, S., 2006. Fast response exhaust
gas temperature measurement in IC Engines. SAE
2006 World Congress, Detroit, MI, Paper No. 2006-
01-1319.
Liu, H., Xu, G., Tong, L., 1993. A deterministic approach
to blind identification of multichannel FIR systems.
Proc. 27th Asilomar Conference on Signals, Systems
and Computers, Asilomar, CA, pp. 581-584.
McLoone, S., Hung, P., Irwin, G., Kee, R., 2006.
Exploiting A Priori Time Constant Ratio Information
in Difference Equation Two-Thermocouple Sensor
Characterisation. IEEE Sensors J., 6, pp. 1627-1637.
Pfriem, H., 1936. Zue messung verandelisher
temperaturen von ogasen und flussigkeiten. Forsch.
Geb. Ingenieurwes, 7, pp. 85-92.
Petit, C., Gajan, P., Lecordier, J. C., Paranthoen, P., 1982.
Frequency response of fine wire thermocouple. J.
Physics Part E, 15, pp. 760-764.
Sato, Y., 1975. A method of self-recovering equalization
for multilevel amplitude modulation systems. IEEE
Trans. in Communications, 23, pp. 679-682.
Tagawa, M., Ohta, Y., 1997. Two-Thermocouple Probe
for Fluctuating Temperature Measurement in
Combustion – Rational Estimation of Mean and
Fluctuating Time Constants. Combustion and Flame,
109, pp 549-560.
Xu, G., Liu, H., Tong, L., Kailath, T., 1995. A least-
squares approach to blind channel identification. IEEE
Trans. on Signal Processing, 43, pp. 2982-2993.
Van Huffel S., Vandewalle, J., 1991. The Total Least
Squares Problem: Computational Aspects and
Analysis, SIAM, Philadelphia, 1
st
edition.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
16
