
ON GENERATING GROUND-TRUTH TIME-LAPSE IMAGE
SEQUENCES AND FLOW FIELDS
Vladim
´
ır Ulman and Jan Huben
´
y
Centre for Biomedical Image Analysis, Masaryk University, Botanick
´
a 68a, Brno 602 00, Czech Republic
Keywords:
Optical flow evaluation, ground-truth flow field.
Abstract:
The availability of time-lapse image sequencies accompanied with appropriate ground-truth flow fields is cru-
cial for quantitative evaluation of any optical flow computation method. Moreover, since these methods are
often part of automatic object-tracking or motion-detection solutions used mainly in robotics and computer vi-
sion, an artificially generated high-fidelity test data is obviously needed. In this paper, we present a framework
that allows for automatic generation of such image sequences based on real-world model image together with
an artificial flow field. The framework benefits of a two-layered approach in which user-selected foreground
is locally moved and inserted into an artificially generated background. The background is visually similar to
the input real image while the foreground is extracted from it and so its fidelity is guaranteed. The framework
is capable of generating 2D and 3D image sequences of arbitrary length. A brief discussion as well as an
example of application in optical microscopy imaging is presented.
1 INTRODUCTION
The growing importance of image processing meth-
ods is unquestionable in the field of automation and
robotics. Especially, optical flow computation meth-
ods are often involved in solutions adopted in, for in-
stance, autonomous systems and agents, vehicle con-
trol applications, surveillance or live-cell microscopy.
The outcome of these methods is often not the fi-
nal product. It is usually further analyzed by object-
tracking or motion-detection methods (C
´
edras and
Shah, 1995; Gerlich et al., 2003; Eils and Athale,
2003).
Important is also thorough testing of a particular
method before its application. This is even more evi-
dent due to the continuous development of image ac-
quisition devices, since the usability of given image
processing method is changing with the nature of ex-
amined image data. Verification is, therefore, an ob-
vious need.
For the purpose of fully automatic testing one has
to have a large data set together with correct results
prepared. Or, the dataset should be generated online
reasonably fast. A dataset consisting of real images
is obviously the ideal choice. Unfortunately, the real
images do not explicitly provide the ground-truth in-
formation about the motion expressed in the data.
There exist methods that extract such motion in-
formation, for example other, than currently tested,
optical flow methods (Horn and Schunck, 1981; Bar-
ron et al., 1994) or image registration techniques (Zi-
tov
´
a and Flusser, 2003). Unfortunately, these practi-
cally always incur some sort of error or imprecision in
the flow field. The same holds for manually processed
data (Webb et al., 2003), not mentioning the tedious
extraction of ground-truth motion information.
We decided to automatically generate vast amount
of artificial test images with the stress on their near-
perfect visual similarity to the real data of the ap-
plication in mind. The aim was to confidently test
the reliability of the given optical flow computation
method using this data. Moreover, we wanted to gen-
erate image sequences together with associated flow
fields reasonably fast (i.e. faster than the execution
of an optical flow computation method) to be able to
simulate the behaviour of real-time decision system
incorporating optical flow computation. Tracking of
a live cell in microscopy can be taken as an exam-
234
Ulman V. and Hubený J. (2007).
ON GENERATING GROUND-TRUTH TIME-LAPSE IMAGE SEQUENCES AND FLOW FIELDS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 234-239
DOI: 10.5220/0001630202340239
Copyright
c
SciTePress
ple of such a decision-making system. Due to tech-
nology limits the cell can be acquired with only re-
stricted (small) surroundings and needs on-line 2D or
3D tracking (moving the stage with the cell based on
its motion).
The next section gives a motivation to the adopted
solution by means of brief overview of possible ap-
proaches. The third section describes the proposed
framework which automatically generates 2D and 3D
image sequences of arbitrary length. It is followed by
the section in which behaviour and sample image data
for the case of optical microscopy is presented. A 3D
image is considered as a stack of 2D images in this
paper.
2 MOTIVATION
Basically, there are just two possible approaches to
obtain image sequences with ground-truth flow fields.
One may inspect the real data and manually determine
the flow field. Despite the bias (Webb et al., 2003) and
possible errors, this usually leads to a tedious work,
especially, when inspecting 3D image sequences from
a microscope. The other way is to generate sequences
of artificial images from scratch by exploiting some
prior knowledge of a generated scene. This is usually
accomplished by taking 2D snapshots of a changing
3D scene (Galvin et al., 1998; Barron et al., 1994;
Beauchemin and Barron, 1995). The prior knowledge
is encoded in models which control everything from
the shape of objects, movements, generation of tex-
tures, noise simulation, etc. (Lehmussola et al., 2005;
Young, 1996). This may involve a determination of
many parameters as well as proper understanding of
the modeled system. Once the two consecutive im-
ages are created, the information about movement be-
tween these two can be extracted from the underlying
model and represented in a flow field.
We have adopted the approach in which we rather
modify an existing real sample image in order to gen-
erate an image sequence. This enabled us to avoid
most of the modeling process as we shall see later.
Moreover, we could easily create a flow field we
were interested in. Consecutive images from the sam-
ple image could be then transformed by using either
backward or forward transformations (Lin and Bar-
ron, 1994). Both transformations are possible. Never-
theless, we observed that forward transformation was
substantially slower. Hence, we described the frame-
work based only on backward transformation in this
paper.
The backward transformation moves the content
of an image with respect to the input flow field. The
flow field assigns a vector to each voxel in the im-
age. When generating a sequence, the voxel value
is expected to move along its vector into the follow-
ing image. The backward transformation works in the
opposite direction: the preceding image is always cre-
ated. Basically, the voxel at vector’s origin is fetched
into an output image from vector’s end in the input
image. An interpolation in voxel values often occurs
due to real numbers in vectors.
A few drawbacks of the backward transformation
must be taken into account when used. Owing to the
interpolation the transformed image is blurred. The
severity depends on the input flow field as well as in-
terpolation method used. Moreover, the blur becomes
more apparent after a few iterative transformations of
the same image. Thus, the number of transformations
should be as low as possible. Another issue appears
when the flow field is not continuous. In this case, two
(or even more) vectors may end up in the same posi-
tion which copies the same voxel into distinct places
in the output image. Unfortunately, non-continuous
flow field is the case when local movements are to be
simulated. Both drawbacks are demonstrated in the
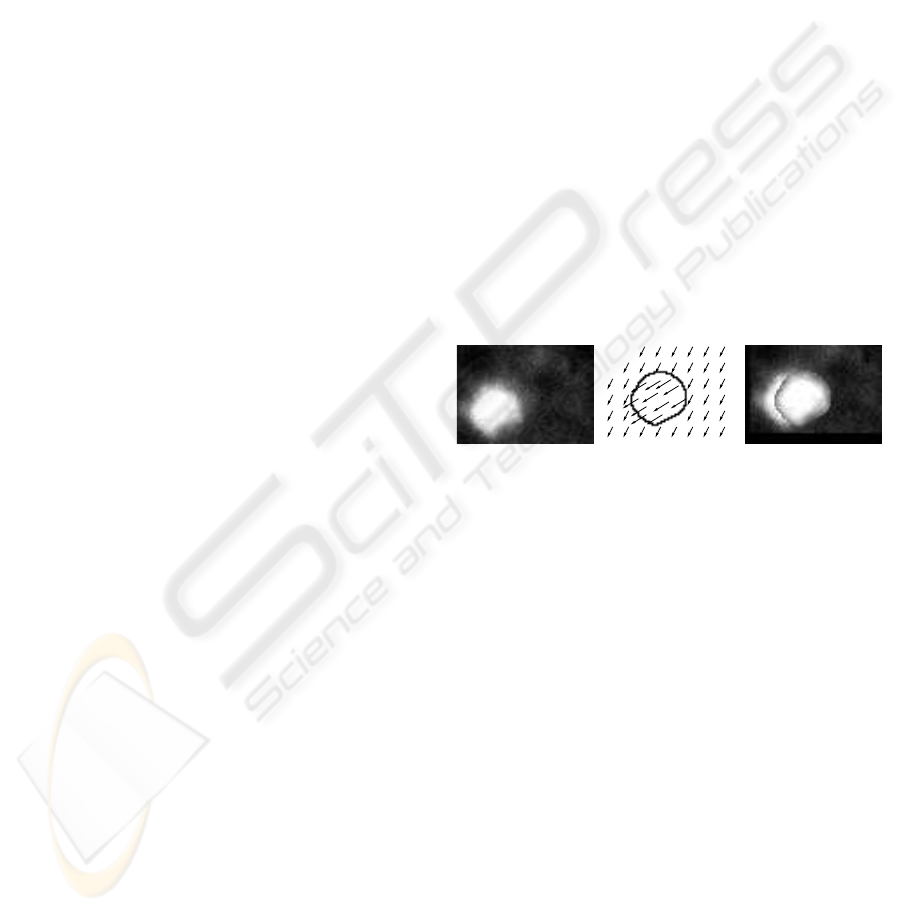
example in Fig. 1.
CA B
Figure 1: Backward transformation. A) An input image. B)
Visualization of the input flow field with two homogeneous
regions. C) A transformed image. Notice the blurred corona
as well as the partial copy of the moved object. Images were
enhanced to be seen better.
3 THE FRAMEWORK
In this section we described the framework based
on two-layered component-by-component backward
transformation. The input to the framework was an
real-world sample image, a background mask, a fore-
ground mask and a movements mask. The back-
ground mask denoted what, as a whole, should be
moved in the sample image. The foreground mask de-
noted independent regions (components) in the sam-
ple image that were subjects to local movements.
The movements of components had to remain inside
the movements mask. The output of the framework
was a sequence of artificially generated images to-
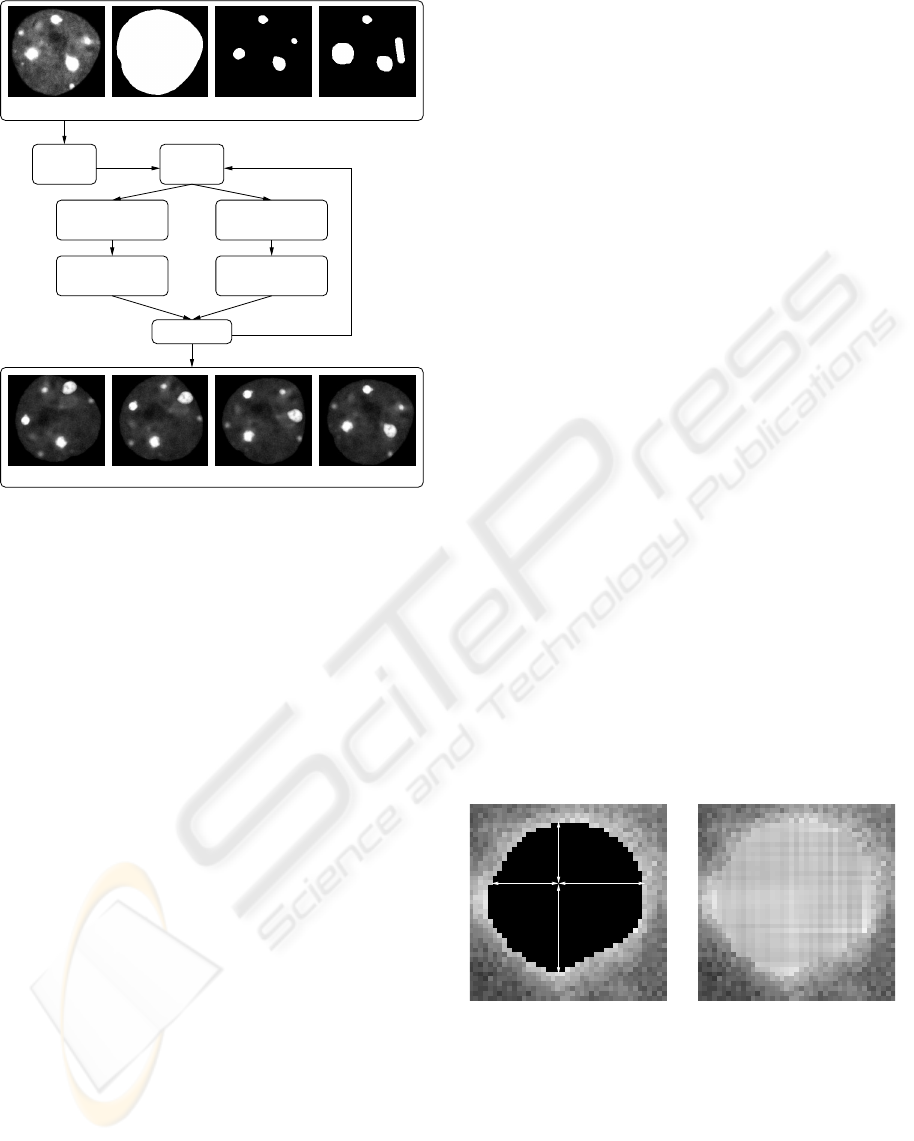
gether with appropriate flow fields. The schema of the
framework is displayed in Fig. 2. The foreground and
background masks were results of advanced segmen-
tation method (Huben
´
y and Matula, 2006) which was
ON GENERATING GROUND-TRUTH TIME-LAPSE IMAGE SEQUENCES AND FLOW FIELDS
235
iTH FRAME
BACKGROUND
GENERATION
LOCAL
MOTIONS
FOREGROUND
PREPARATION
INPUT
RANDOM
POOL
GLOBAL
MOTION
BACKGROUND
PREPARATION
OUTPUT
Figure 2: The schema of the framework. From left to right
in INPUT: sample image, background mask, foreground
mask, movements mask; in OUTPUT: examples of 1st,
10th, 20th and 30th image of a generated sequence, respec-
tively. Images were enhanced to be seen better.
initiated with manually thresholded mask images.
The framework was aimed against two obstacles.
Firstly, when foreground component was moved away
from its place, the empty region had to be filled
in. Therefore, only image regions corresponding to
foreground components could be directly used. The
whole background had to be artificially generated.
Secondly, several transformations of the same image
data was not acceptable. In order to generate long se-
quences without increasing blur in generated images,
we developed a concept of generating ith image di-
rectly from the sample image instead of the i + 1th
image. Last but not least, owing to the backward
transformation property the framework generated im-
age sequence from the last to the first image.
The random pool was the initiating step of the pro-
cess. Here, specific voxels from the sample image
were collected and stored into a separate image. Vox-
els had to lay inside the background mask and out-
side the foreground mask. The mean intensity value
µ over these voxels was computed. The selection was
then even restricted. In the separate image, the pool,
remained only such voxel which intensity value was
inside the interval (µ− σ, µ+kσ) where σ and k were
supplied manually. We set σ = 11 and k = 3/2 to fit
the real histogram better. This will probably change
when different sort of images is generated.
A simulation of some global movement of the en-
tire sample image was achieved in the unit global mo-
tion. In this unit, the flow field for the ith frame was
formed for the first time. The foreground and back-
ground masks as well as movements mask were trans-
formed according to this flow field. There was a zero
flow field created when processing the last image of
the sequence, i.e. the first image created by the frame-
work.
The generation of background started from prepa-
ration of the sample image. The sample image had to
be positioned to fit the background mask. We made
use of a special flow field for that purpose. This flow
field was concatenated to the flow created in the pre-
vious unit and the result was kept until the next se-
quence image is considered. Copy of sample image
was transformed according to this special flow field.
Note that the backward transformation may be used
for concatenation of flow fields if we store flow vec-
tor’s elements in separate images. The concatenated
flow is transformed and added to the flow.
A new similar background was created in two
steps. The foreground components were removed
from the transformed copy of sample image and the
holes were filled in as described in Fig. 3. The result
was filtered in order to estimate local averages. We
used the 9× 9 filter of ones which still reflected local
intensity values sensitively, yet the filtered image was
smooth. In the second step, the background mask was
filled in with randomly chosen values from the pool
created in the random pool unit. Finally, correspond-
ing local average subtracted to the value of the mean µ
was added to each voxel within the background mask.
This ensured the high fidelity of the generated texture.
BA
Figure 3: The filling of removed foreground regions. A)
For each examined voxel, nearest voxel in each direction
outside the black region is found and the distance is deter-
mined. A weighted average of 1/distance-based values is
supplied. B) The result of such filling.
The foreground mask was first decomposed into
independent components in the local motions unit.
Each one is treated separately. A translating motion
vector was randomly chosen from all such vectors that
keep the component within the movement mask. We
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
236

also made use of user supplied parameter for maxi-
mum allowed length of motion vector which enabled
us to control the magnitude of independent local mo-
tions. A temporary flow field was created and uni-
formly filled with this vector. The mask of this com-
ponent only and a copy of the ith flow field were trans-
formed according to this uniform flow. This moved
the component mask and prepared the concatenation
of the corresponding region of the flow field. The
concatenation was finished by pasting this region fol-
lowed by addition of chosen flow vector to each vec-
tor inside the region into the ith flow. Note that more
complex foreground movement may be used by sub-
stituting any smooth flow field for the uniform one
as well as corresponding vectors should be added in-
stead of constantly adding the chosen one. After all,
new foreground mask was created by merging all sin-
gle locally moved masks.
In the foreground preparation unit, similarly to
the background preparation, another special flow field
was used. It was again concatenated to the current
ith flow and the result was stored for the next frame-
work’s iteration. Another copy of sample image was
transformed according to this another special flow
field to position the foreground texture.
In the ith frame unit, the foreground regions were
extracted from the transformed copy of sample im-
ages. The extraction was driven by the new fore-
ground mask which was dilated (extended) only for
that purpose beforehand. Finally, the ith image was
finished by weighted insertion (for details refer to (Ul-
man, 2005)) of the extracted foreground into the artifi-
cially generated background. The weights were com-
puted by thresholding the distance transformed (we
used (Saito and Toriwaki, 1994)) foreground mask.
An illustration of the whole process is shown in Fig. 4.
4 RESULTS
We implemented and tested the presented frame-
work in C++ and in two versions. The first version
created only image pairs while the second version cre-
ated arbitrarily long image sequences. It was imple-
mented with both backward and forward transforma-
tions. We observed that for 2D images the forward
variant was up to two orders of magnitude slower than
the backward variant. Therefore, the second version
was implemented based only on backward transfor-
mation. The program required less then 5 minutes on
Pentium4 2.6GHz for computation of a sequence of
50 images with 10 independent foreground regions.
The generator was tested on several different 2D
real-world images and one real-world 3D image. All
generated images were inspected. The framework
generates every last image in the sequence as a re-
placement for the sample image. Thus, we com-
puted correlation coefficient (Corr.), average abso-
lute difference (Avg. diff.) and root mean squared
(RMS) differences. The results are summarized in
Table 1. The generator achieved minimal value of
0.98 for correlation. This quantitatively supports our
observations that generated images are very close to
their originals. The suggested framework also guaran-
tees exactly one transformation of the sample image,
hence the quality of the foreground texture is best pos-
sible thorough the sequence. Refer to Fig. 5 for ex-
ample of 3 images of a 50 images long sequence. A
decent improvement was also observed when an arti-
ficial background of 3D image was formed in a slice-
by-slice manner, see rows C and D in Table 1. In the
case of row D, a separate random pools and mean val-
ues were used for each slice of the 3D image.
Inappropriately created foreground mask may em-
phasize the borders of extracted foreground when
inserted into artificial background. The weighted
foreground insertion was observed to give visually
better results. Table 1 quantitatively supports our
claim: merging the foreground components accord-
ing to twice dilated foreground mask was comparable
to the plain overlaying of foreground components ac-
cording to non-modified masks.
The use of user-supplied movements mask pre-
vented the foreground components from moving into
regions where there were not supposed to appear, e.g.
outside the cell. The masks are simple to create, for
example by extending the foreground mask into de-
manded directions. The generated sequences then be-
came even more real. Anyway, randomness of com-
ponents’ movements prohibited their movements con-
sistency. Pre-programming the movements would en-
able the consistency. Clearly, the movement mask
wouldn’t be necessary in this case.
5 CONCLUSION
We have described the framework for generating
time-lapse pseudo-real images together with unbiased
flow fields. The aim was to automatically generate a
large dataset in order to automatically evaluate meth-
ods for optical flow computation. However, one may
discard the generated flow fields and use just the im-
age sequence.
The framework allows for the synthesis of 2D and
3D image sequences of arbitrary length. By suppling
real-world sample image and carefully created masks
for foreground and background, we could force im-
ON GENERATING GROUND-TRUTH TIME-LAPSE IMAGE SEQUENCES AND FLOW FIELDS
237
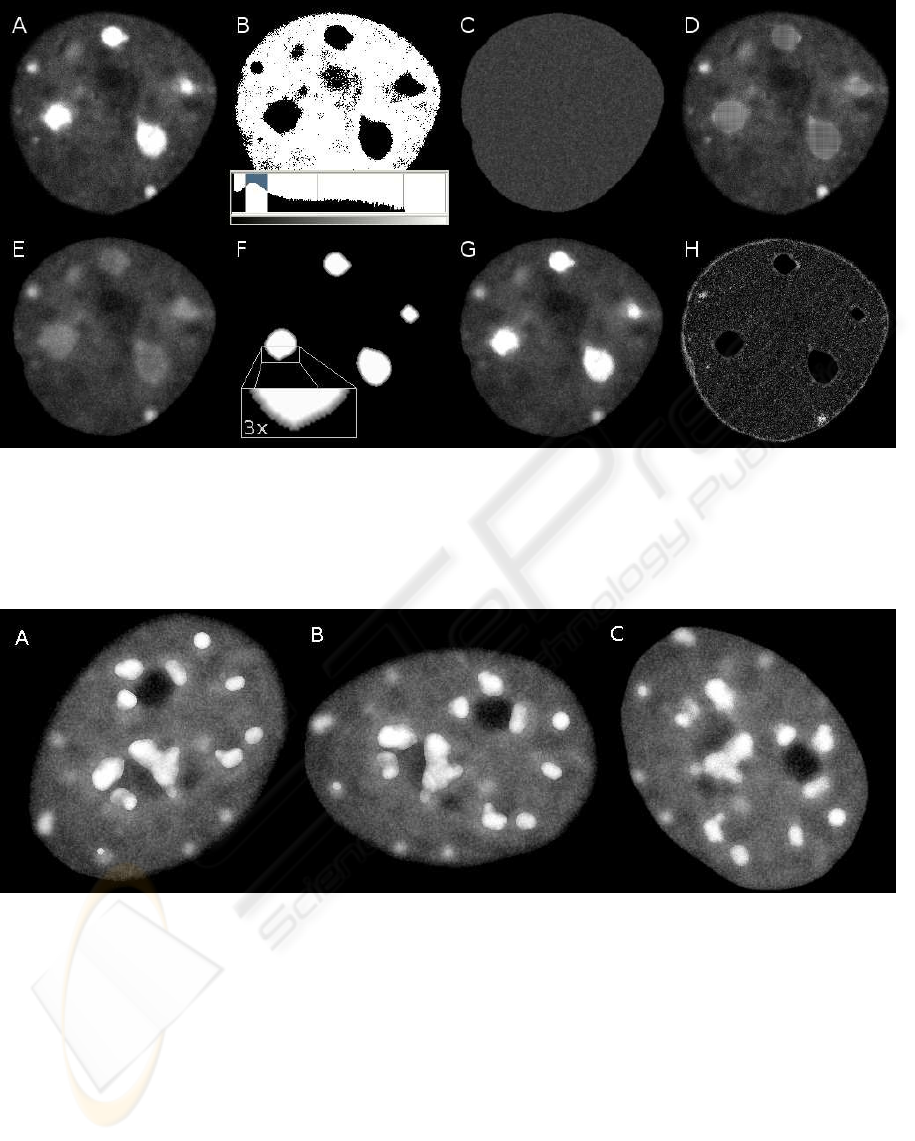
Figure 4: Example of image formation. A) A sample image. B) Its intensity histogram and thresholded image with thresholds
set as shown in the histogram. C) The background filled with randomly chosen values. D) The sample image with foreground
regions filled in. E) The same image after the averaging filter. F) The weights used together with the extended foreground
mask, brighter intensity shows higher weight. G) The artificial image (the last image in the sequence). H) A map of intensity
differences between A) and G), maximum brightness is at value of 30. Note that the highest errors were due to erroneous
segmentation of the background. All images were enhanced for the purpose of displaying.
Figure 5: Example of 3 frames from image sequence. A) The first frame (the last generated). B) The middle frame. C) The
last frame (the first generated). All images were enhanced for the purpose of displaying.
ages in the sequence to look more realistic. We made
use of rotation and translation transformations for
global motion (of the entire cell) and only translations
for independent local movements of foreground com-
ponents (selected intracellular structures). The trans-
formations used can be arbitrary, owing to the formal-
ism of the flow field, provided they are continuous be-
cause of limitation of both transformation methods.
Seamless overlaying of the foreground was achieved
by the weighted insertion of foreground which im-
proved the robustness to any imprecision in the fore-
ground segmentation. We also made use of local
movements mask which gave us ultimate control over
the independent foreground movements.
We believe that the framework is applicable to
other fields as well. In some circumstances, image
processing subroutines may differ as well as different
foreground movements may be desired. The require-
ment is that images should be separable into just two
layers and that the background should be reasonably
easy to generate. For instance, in the vehicle control
applications one may meet the requirement: observ-
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
238
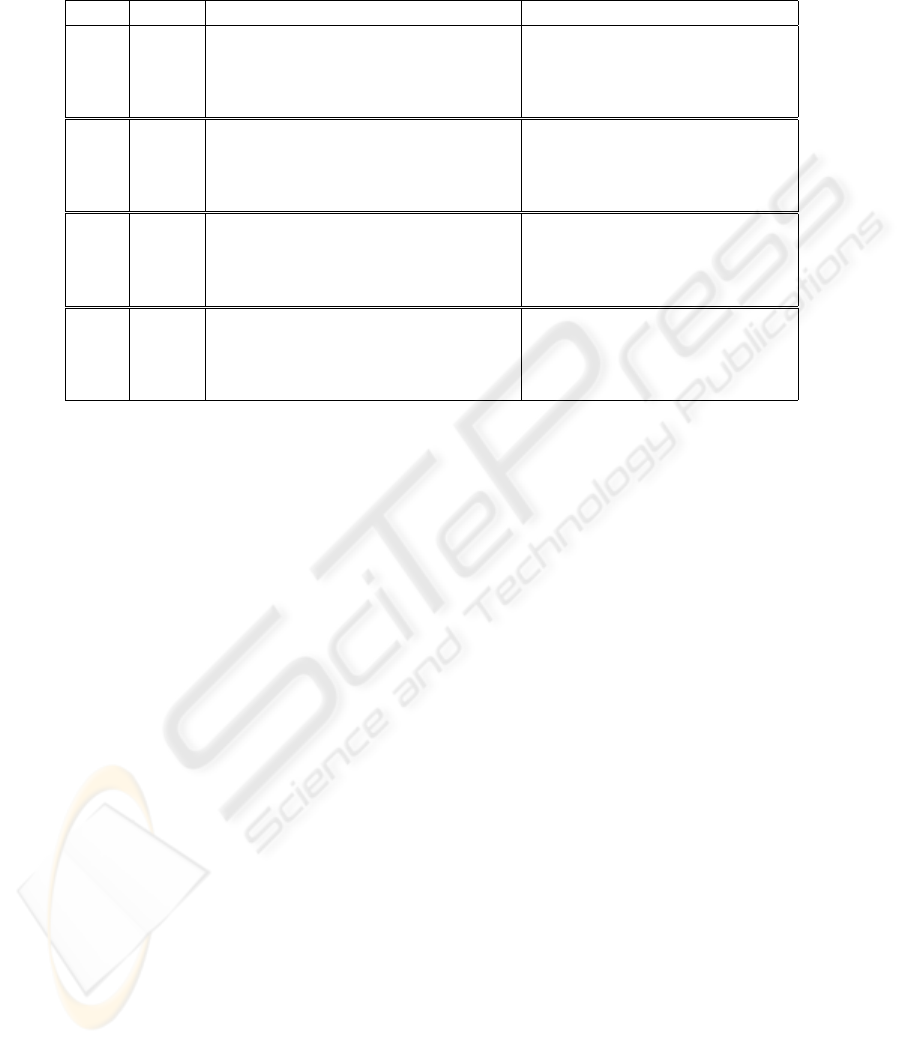
Table 1: Similarity comparison from several aspects. The column “Ext.” shows the number of dilations performed on the input
foreground mask beforehand. The upper indices denote whether the foreground regions were simply overlaid
1
or merged
2
into the background. A) and B) Comparisons over 2D images. C) Comparison over a 3D image. D) Comparison over the
same 3D image, separate pools of voxel intensities were used for each slice during the formation of the artificial background.
Ext. Corr.
1
Avg. diff.
1
RMS
1
Corr.
2
Avg. diff.
2
RMS
2
A 0 0.989 3.87 5.13 0.989 3.87 5.12
1 0.989 3.80 5.03 0.989 3.85 5.05
2 0.989 3.73 4.94 0.989 3.82 5.00
3 0.989 3.68 4.90 0.989 3.83 4.98
B 0 0.992 2.76 3.83 0.992 2.77 3.85
1 0.992 2.62 3.69 0.992 2.74 3.75
2 0.993 2.41 3.46 0.992 2.62 3.58
3 0.993 2.33 3.40 0.992 2.64 3.57
C 0 0.980 3.67 4.79 0.980 3.67 4.79
1 0.980 3.73 4.89 0.980 3.81 4.92
2 0.981 3.53 4.69 0.981 3.70 4.77
3 0.981 3.42 4.59 0.981 3.66 4.72
D 0 0.982 3.15 4.16 0.982 3.16 4.17
1 0.983 3.07 4.08 0.982 3.13 4.11
2 0.983 3.00 4.03 0.983 3.11 4.08
3 0.984 2.92 3.96 0.983 3.10 4.05
ing an image of a car on the road can be split into the
car foreground and rather uniform road background.
ACKNOWLEDGEMENTS
The presented work has been supported by the Min-
istry of Education of the Czech Republic (Grants No.
MSM0021622419, LC535 and 2B06052).
REFERENCES
Barron, J. L., Fleet, D. J., and Beauchemin, S. S. (1994).
Performance of optical flow techniques. Int. J. Com-
put. Vision, 12(1):43–77.
Beauchemin, S. S. and Barron, J. L. (1995). The computa-
tion of optical flow. ACM Comput. Surv., 27(3):433–
466.
C
´
edras, C. and Shah, M. A. (1995). Motion based recog-
nition: A survey. Image and Vision Computing,
13(2):129–155.
Eils, R. and Athale, C. (2003). Computational imaging in
cell biology. The Journal of Cell Biology, 161:447–
481.
Galvin, B., McCane, B., Novins, K., Mason, D., and Mills,
S. (1998). Recovering motion fields: An evaluation
of eight optical flow algorithms. In In Proc. of the 9th
British Mach. Vis. Conf. (BMVC ’98), volume 1, pages
195–204.
Gerlich, D., Mattes, J., and Eils, R. (2003). Quantitative
motion analysis and visualization of cellular struc-
tures. Methods, 29(1):3–13.
Horn, B. K. P. and Schunck, B. G. (1981). Determining
optical flow. Artificial Intelligence, 17:185–203.
Huben
´
y, J. and Matula, P. (2006). Fast and robust segmen-
tation of low contrast biomedical images. In In Pro-
ceedings of the Sixth IASTED International Confer-
ence VIIP, page 8.
Lehmussola, A., Selinummi, J., Ruusuvuori, P., Niemisto,
A., and Yli-Harja, O. (2005). Simulating fluorescent
microscope images of cell populations. In IEEE En-
gineering in Medicine and Biology 27th Annual Con-
ference, pages 3153–3156.
Lin, T. and Barron, J. (1994). Image reconstruction error
for optical flow. In Vision Interface, pages 73–80.
Saito, T. and Toriwaki, J. I. (1994). New algorithms for Eu-
clidean distance transformations of an n-dimensional
digitized picture with applications. Pattern Recogni-
tion, 27:1551–1565.
Ulman, V. (2005). Mosaicking of high-resolution biomed-
ical images acquired from wide-field optical micro-
scope. In EMBEC’05: Proceedings of the 3rd Euro-
pean Medical & Biological Engineering Conference,
volume 11.
Webb, D., Hamilton, M. A., Harkin, G. J., Lawrence, S.,
Camper, A. K., and Lewandowski, Z. (2003). Assess-
ing technician effects when extracting quantities from
microscope images. Journal of Microbiological Meth-
ods, 53(1):97–106.
Young, I. (1996). Quantitative microscopy. IEEE Engineer-
ing in Medicine and Biology Magazine, 15(1):59–66.
Zitov
´
a, B. and Flusser, J. (2003). Image registration meth-
ods: a survey. IVC, 21(11):977–1000.
ON GENERATING GROUND-TRUTH TIME-LAPSE IMAGE SEQUENCES AND FLOW FIELDS
239
