
A COMPARISON OF HUMAN AND MARKET-BASED ROBOT
TASK PLANNERS
Guido Zarrella, Robert Gaimari and Bradley Goodman
The MITRE Corporation, 202 Burlington Road, Bedford MA 01803, USA
Keywords: Market-based multi-robot planning, intelligent control systems, distributed control, planning and
scheduling, tight coordination, task deadlines, decision support.
Abstract: Urban search and rescue, reconnaissance, manufacturing, and team sports are all problem domains requiring
multiple agents that are able to collaborate intelligently to achieve a team goal. In these domains task
planning and assignment can be challenging to robots and humans alike. In this paper we introduce a
market-based distributed task planning algorithm that has been adapted for heterogeneous, tightly
coordinated robots in domains with time deadlines. We also report the results of our experiments comparing
the robots' decisions with the decisions produced by ten teams of humans performing an identical search and
rescue task. The outcome provides insight into the types of problems for which information technology can
add value by providing decision support for human problem solvers.
1 INTRODUCTION
There are many modern problems that are not
efficiently solved by a single human or robot. In
domains like search and rescue, reconnaissance, and
RoboCup, any attempt to solve the problem with a
single robot may be inefficient, failure prone, or
completely impossible. In these circumstances a
team of agents must collaborate intelligently and
task planning becomes central to the team success.
The extremes of multi-robot task planning and
allocation algorithms are centralized and distributed
approaches. In a centralized approach one agent
plans the actions of the entire team and distributes
the orders. In a distributed approach, each robot is
responsible for creating its own plan using only local
communication among robots. Centralized methods
possess the key advantage of having all information
needed to generate a globally optimal plan, while
distributed approaches tend to be more scalable,
robust to failure, and faster to respond to changes in
the local environment. The ideal algorithm would
combine features of both approaches to create a
robust planning mechanism that is able to find a
reasonable approximation of the optimal solution.
Past research into decentralized market-based
task allocation protocols (Walsh et al., 1998; Dias,
2004; Lagoudakis et al., 2005) has been motivated
by an attempt to design one such algorithm. In a
market-based algorithm the robots bid against each
other for tasks while acting rationally to maximize
personal profit based on local calculations of cost
and reward. This will move the entire team on
average toward a globally efficient solution if the
costs and revenues functions are properly
constructed (Gerkey and Mataric, 2004). A market-
based approach allows robot teams to reason
efficiently about task allocation and resource
management while preserving the ability of
members of the team to adapt rapidly and robustly in
the face of a dynamic environment. This technique
mimics the flexibility of a free market economy by
allowing ad-hoc teams to cooperate or compete
opportunistically.
Prior research has demonstrated the effectiveness
of variants of Dias’ market-based TraderBots in
several domains. The approach has been applied to
tightly coordinated tasks that require heterogeneous,
dynamically formed teams (Jones et al., 2006a). In
this work two types of treasure hunting robots
collaborate to simultaneously map an environment
and detect the treasure within it. The TraderBots
approach has also been used for task assignment in
domains with time deadlines (Jones et al., 2006b),
for example in homogeneous teams of fire-fighting
robots completing tasks in which the reward for
extinguishing a fire decays as a function of the
elapsed time.
Yet another class of problems combines
elements from the above domains. Collaborative
149
Zarrella G., Gaimari R. and Goodman B. (2007).
A COMPARISON OF HUMAN AND MARKET-BASED ROBOT TASK PLANNERS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 149-154
DOI: 10.5220/0001631701490154
Copyright
c
SciTePress

Time Sensitive Targeting (TST) is a domain
requiring a diverse team of agents able to coordinate
in discovering, assessing, prioritizing and solving
new tasks within a very limited amount of time. This
requires heterogeneous, dynamically formed teams
that are both tightly coordinated and capable of
reasoning about task deadlines. Search and rescue is
one real-world example of a TST problem. For
instance an avalanche rescue team’s goal might be to
“find each buried survivor and dig him or her out of
the snow within sixty minutes.” In this case
searchers and diggers need to form dynamically
changing and complementary teams to rescue as
many survivors as possible within a limited time.
Time Sensitive Targeting can be a difficult
problem solving task for humans as well as robots.
Frequently decisions must be made about how to re-
evaluate team strategy to make the best use of scarce
resources. This makes TST an ideal testbed for a
market-based task planning and allocation
algorithm.
This paper describes our attempt to design and
evaluate the first market-based planning system
capable of reasoning in situations requiring tightly
coordinated, deadline aware agents. In Section 2 we
describe the specifics of our simulated Time
Sensitive Targeting domain. We introduce our
planning algorithm in Section 3. In Section 4 we
discuss our experiments involving teams of humans
attempting to solve a TST problem. In Section 5 we
contrast the human and robot results, and in Section
6 we present our conclusions about the potential for
the application of information technology to benefit
teams of human decision makers.
2 TST SCENARIO
The central element of solving a Time Sensitive
Targeting problem is the ability to assess and
respond to emerging tasks within a limited window
of time. The typical TST task requires a coordinated
effort between a large number of specialized
information gathering and action taking agents.
Furthermore it is essential that the team is able to
continually reprioritize its goals as new information
arrives from the noisy and rapidly changing
environment.
We designed a simulated TST scenario to use in
our task planning and problem solving experiments.
Our scenario is a type of Search and Rescue problem
in which agents attempt to locate, investigate, and
rescue six simultaneously moving targets before
each target’s time deadline expires.
The premise of the scenario is that the Coast
Guard is responsible for monitoring three areas of
ocean for sick or injured animals. The Coast Guard
is provided with a fleet of specialized vehicles such
as helicopters, boats, and submarines. The goal is to
use these vehicles to find, diagnose, and rescue a
series of endangered animals. In our experiments the
fleet of vehicles was controlled either by a small
team of humans or by our market-based robot task
planning algorithm.
Over the course of the 90 minutes of an exercise,
the Coast Guard receives messages containing
reports of the general locations where distressed
animals have been sighted. A message provides the
type of animal, an approximate latitude-longitude, a
time deadline for task completion (e.g. cure the sick
manatee within 30 minutes or it will die), and the
relative value of the task (represented by the
maximum reward offered for task completion).
The Coast Guard’s vehicle fleet includes a
heterogeneous collection of robots. There are three
main categories of vehicles.
Radar Sensors are planes and boats equipped
with radar or sonar sensing capabilities. They are
generally very fast and have large sensing range, so
they can get to a location quickly, pinpoint where an
animal is located, and track an animal as it moves.
They can share the information they gather with
other teammates. Due to the limitations of radar, this
type of sensor is not able to determine an animal’s
species or diagnose an illness.
Video Sensors include boats and helicopters
with visual sensing capabilities. They are able to
identify animal types and diagnose diseases. They
can also report the information they have gathered to
the rest of the team. However they tend to move
slowly and have limited sensing range, so they are
best used in tandem with other sensors.
Rescue Workers are boats or submarines
outfitted with equipment for capturing or curing an
animal in distress. This is the only type of vehicle
capable of saving an animal once it has been located.
They are generally about as fast as radar sensors, but
they have no sensors of their own. They must rely on
reports from the sensor robots for navigation data.
Also, they are only allowed to assist an animal after
the proper diagnosis has been made by a video
sensor.
The Coast Guard has multiple robots in each
group. Even within groups there are variations of
individual characteristics such as speed or sensor
range. There are 33 vehicles in total, divided
between three separate areas of ocean.
Because of the specialization of the robots, they
are required to form ad hoc teams to fully complete
any task. Each team must, at a minimum, consist of
two robots: a video sensor to find the animal and
make the diagnosis, and a rescue worker to assist the
animal. A radar sensor is not required but its speed
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
150

and sensor range can greatly reduce the overall time
needed for a team to assist an animal.
3 MARKET-BASED ALGORITHM
We chose to develop our market-based multi-robot
task planning algorithm within a controlled
simulation environment. The entire package was
written in Java using the JADE agent framework
(Bellifemine et al., 2001). Our agents used only local
robot-to-robot communication to implement the task
planning protocol. The planning algorithm shares
many similarities with TraderBots and other existing
market-based approaches. Our goal was to extend
the existing approaches to be capable of performing
planning in domains with both task deadlines and
tightly coordinated ad hoc teams.
The agents in our simulation trade labor for a
fictional currency. An agent earns revenue for the
successful completion of one of the tasks the team
has been asked to perform, but only if the task is
completed before the time deadline arrives. The
agent incurs costs in the process of doing work to
achieve a goal; these costs are proportional to the
amount of time spent working towards the task. An
agent also condsiders the opportunity cost
(Schneider et al., 2005) of agreeing to perform a
task. The self interested agents will only bid on a
task if the potential revenue outweighs the sum of
the impending costs. Agents buy and sell tasks from
each other, forming efficient, specialized teams in
the process. The cost and revenue functions we have
chosen are conducive to fostering teams that solve
problems as quickly as possible without over-
committing the existing resources.
This section of the paper contains a high-level
description of our implementation. (Gaimari et al.,
2007) provides more detail about the algorithm.
3.1 Agents
The TraderAgent is the building block of the robot
economy. Each TraderAgent controls one robot in
the simulation environment. A TraderAgent’s
primary job, as the name implies, is to trade tasks.
Any agent that owns a task may put it up for
auction, announcing the maximum reward it is
prepared to pay. Other TraderAgents that wish to bid
for the job may do so, and after one round of bidding
the seller announces the winner. In standard re-
auctioning this passes ownership of the task to the
buying agent; this agent must have a robot with the
same capabilities as the seller. The selling agent’s
only responsibility thereafter is to pay the promised
bid to the buyer upon completion of the task.
In our system there is an additional type of re-
auctioning that occurs. Since the robots must work
together in teams to complete the tasks, some re-
auctions are for the purpose of teambuilding among
agents with different capabilities. In this case both
agents retain ownership of the task. For each task a
TraderAgent owns, there is a corresponding list of
the teammates it is working with. If an agent owns
multiple tasks it can belong to multiple teams.
New tasks are given to a special agent that
executes the initial auction. This agent does not
control a robot in the simulation.
3.2 Bidding on Auctions
When a TraderAgent receives an auction
announcement, it performs the following steps:
It calculates the estimated cost for performing
the task. In our scenario the cost is given by
the amount of time required to accomplish a
task. Since the description of a task provides
noisy and imprecise information about the
location of an animal, costs cannot be
determined exactly in advance. The agent
prepares a cost estimate based on its technical
abilities and current location.
It calculates the opportunity cost associated
with accepting responsibility for the task. This
represents the likelihood that the agent will be
able to win hypothetical future tasks. Robots
with especially unique abilities will have
higher opportunity costs than more common
types of robots. Opportunity cost is also
affected by the robot’s location on the map, as
some areas are more desirable for finding
work than others.
It calculates the desired profit margin. This is
a function of the opportunity cost and the
difference between the offered reward and the
estimated cost. Robots with low opportunity
costs will lower their desired profit margin in
an attempt to increase the chance of winning
the current auction.
It calculates the final bid amount and places a
bid if the cost plus the desired profit margin is
less than the reward offered by the seller.
3.3 Collecting Payment
Once a task is completed, each TraderAgent reports
that fact to the agent it bought the task from, asking
to be paid. Domains with tightly coordinated,
heterogeneous teams and time deadlines require
special handling of payment allocation. In this case
the teams are made up of robots that do their jobs at
A COMPARISON OF HUMAN AND MARKET-BASED ROBOT TASK PLANNERS
151
greatly different speeds. Slower robots can lead to
much higher costs and lower rewards than a faster
robot may have originally estimated. If the cost
estimations are too inaccurate, the ability of agents
to prioritize different tasks is damaged.
In our system an agent penalizes its teammates
when the team underperforms expectations. Each
agent requests the amount of payment agreed upon
during the bidding process. As the payments are
distributed, each agent compares its actual cost to
the estimated cost it had initially planned upon. The
difference between these is deducted from the
amount paid to the next agent. This agent then adds
the difference in its own actual cost and original
estimate, plus the amount it was penalized by its
seller. The penalty moves down the chain in this
fashion until it finally ends where it belongs, on the
slowest member of the team. These payments reflect
the amount of money the original agents would have
bid had they had known the true cost of working
with slower robots. This penalty system provides
feedback that allows the robots to learn
improvements to their cost estimation and bidding
practices.
4 HUMAN EXPERIMENTS
We tested the performance of teams of people on an
isomorphic version of the Coast Guard search and
rescue problem. The performance results of these
teams of humans are directly comparable to the
performance results of our market-based robot
teams.
In these experiments, each team consisted of
three college educated adults. The teams were mixed
sex and made up of computer literate participants
between the ages of 28 and 65. The members of the
teams were provided with computer tools allowing
them to view maps of the environment and control
the movements and actions of the simulated robot
vehicles. The participants were working in the same
room and were permitted to speak with each other
but were not allowed to look at the others’ computer
displays. Each member of the team was randomly
assigned a unique and complementary role.
The Intel Officer acted as the team leader and
was responsible for coordinating the team response
to targets assigned to the group. This officer
received the messages containing the rumored
locations of new targets. The messages also
specified a time deadline by which the task had to be
completed. The intel officer was then expected to
share this new information with the team and
monitor the group’s progress toward the goal.
The Sensor Analyst commanded the fleet of 20
heterogeneous sensor devices, including video
equipped helicopters and radar planes. The sensor
analyst was responsible for choosing which sensors
to use, for ordering changes in sensor paths, and for
monitoring the state of each sensor to check for
newly detected items.
The Rescue Worker commanded a fleet of 13
heterogeneous rescue vehicles. This analyst was
responsible for choosing which rescue vehicles to
deploy, for ordering changes to each vehicle’s path,
and for giving the official order to rescue an animal.
As in the robot experiments, the teams were
expected to locate and positively identify each target
using their sensors before rescuing the animal. The
experiment was an exercise in communication and
team problem solving. Successful prosecution of a
target was dependent on the participants’ ability to
1) share relevant information without distracting
each other from the task at hand, 2) interpret the
state of the environment in a timely fashion, and 3)
choose appropriate actions to execute. The
simulation was developed as a simplification of real
world exercises performed by similar teams of TST
analysts (Goodman et al., 2005).
5 EXPERIMENTAL RESULTS
We evaluated the performance of the human and
robot teams on our search and rescue TST scenario.
Ten teams of three people attempted the problem.
Each experiment lasted for 90 minutes. During this
time, six targets were assigned to each team. The
first three targets were assigned at 15 minute
intervals, and the last three targets were assigned at
5 minute intervals. Each target had a time deadline
between the 80
th
and 90
th
minutes of the experiment.
Table 1 shows the number of tasks completed by
each human team. The best teams completed four of
the six tasks before the time deadline. The worst
teams were unable to successfully complete any of
the tasks. The average number of tasks completed by
the ten teams was 1.9, and the median was 2. In all,
the teams of humans completed 32% of the tasks.
Table 1: The number of tasks, out of 6, completed by each
group before the time deadline.
Team # 1 2 3 4 5 6 7 8 9 10
# Tasks
Finished
on Time
23413 0 0 0 4 2
Table 2 shows the number of teams that were
able to successfully complete each task before the
time deadline. Note that two of the tasks (#4, #6)
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
152
were not completed by any of the teams. Another
task (#2) was completed by all teams except for
those groups that did not complete any tasks. These
figures indicate that in general the tasks were not
trivial to solve by teams of humans attempting the
assignment, and that there was a good mix of
difficulty levels in the problems presented to the
teams.
Table 2: The number of teams, out of 10, that completed
each task before the deadline.
Task # 1 2 3 4 5 6
# of
Successful
Teams
4 7 3 0 5 0
Table 3: The tasks completed by the autonomous robots
before the deadline.
Task # 1 2 3 4 5 6
Solved
before
Deadline?
Y Y Y Y Y N
The results of the robot team are displayed in
Table 3. The team of robots completed five of the
six tasks, a success rate better than best of the human
teams. This demonstrates the ability of the robots to
apply effective team building and task assignment
strategies. We also use length of time before solution
to compare robot team performance to human team
performance, shown in Figure 1.
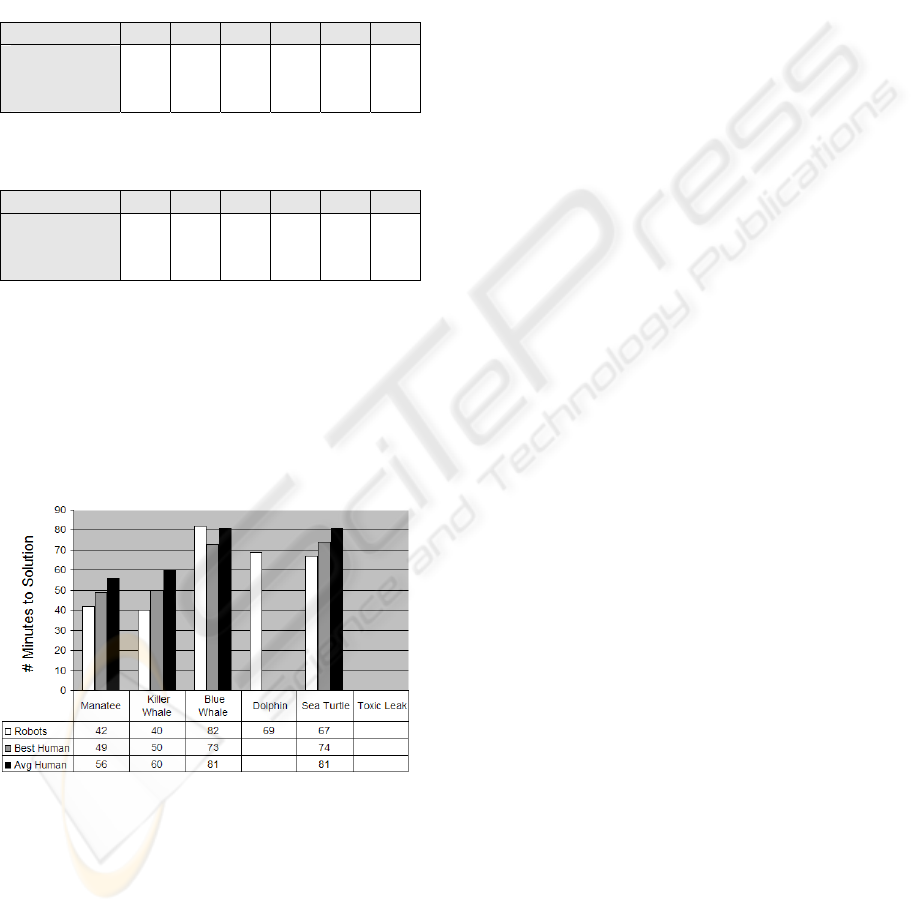
Figure 1: A comparison of the time to solution for the
robot team, average human team, and best human team.
Lower is better.
The robot teams compare very favorably to the
human teams. The simulated agents were much
faster than the best human teams in three of the four
tasks that were solved by both humans and robots.
The agents also were able to complete the Dolphin
task, which none of the ten human teams had
successfully accomplished within the time deadline.
The simulated agents did fail to complete one task,
but none of the human teams were able to
successfully complete that task either.
6 APPLICATIONS AND
CONCLUSION
The ad hoc teams of distributed market-based task
planners demonstrated better performance on a
simplified Time Sensitive Targeting task than the
teams of humans attempting the same task. This
result demonstrates that it is feasible to use our
planning algorithms on tightly coordinated and time
constrained tasks. The result is especially interesting
in light of the fact that real-life problem solvers,
such as military TST analysts, are humans
collaborating in ad-hoc teams to attempt to combine
forces into one integrated, efficient system.
What are the reasons for these differences in
performance, and how can we use advances in
information technology to improve human
efficiency? Humans have an advantage over
computers in that a lifetime of interactions with
other humans allow them to plan and coordinate
actions without the need for a formal communication
and negotiation structure. Humans are also naturally
able to integrate new information into the planning
process in an online manner. Therefore the results
described above are at least moderately surprising.
However, one key limiting factor on human
performance is that humans have limited attention
resources. It isn’t possible for a single person to
attend to the output of all twenty sensors
simultaneously. As the number of concurrent tasks
increase, human teams can suffer from increased
cognitive load, which can dramatically affect a
team’s ability to respond to new information in a
timely manner. One example of this can be seen in
our human TST experiments, in which the average
time delay between receiving and reading a new e-
mail message increased steadily as more concurrent
tasks were added.
In essence, the teams of humans are exhibiting
the same drawbacks of a centralized multi-robot
planning algorithm. Information from sensors must
propagate to the top of the chain of command before
a plan can be implemented that reflects changes in
the state of the task. For some domains this is an
adequate solution; unfortunately humans do not
“scale” well to larger scenarios in which attention
resources must be divided between larger numbers
of targets. The results of our experiments
demonstrate that TST teams can struggle when
forced to make decisions about which targets are
most worth pursuing given limited attention and
A COMPARISON OF HUMAN AND MARKET-BASED ROBOT TASK PLANNERS
153

resources. Real world teams are routinely forced into
this situation. At SIMEX, a realistic TST simulation
that uses real analysts from various government
forces, 145 vehicles are manned by 30 operators
pursuing any number of targets (Loren, 2004).
The market-based robot planning system, in
these situations, is able to benefit from its distributed
nature. As each autonomous agent receives updates
on the state of the environment, this information is
immediately propagated to the affected agents. This
means that new tasks or newly sensed targets are
promptly incorporated into the team plan. In the
robot teams, the performance bottleneck is the
quality of the decision making process rather than
the availability of relevant data.
It is unreasonable to suggest that intelligent
agents can replace the human decision makers in
high risk Time Sensitive Targeting environments.
The results from our simplified and noise-free
environment can’t necessarily be extrapolated to
apply in far more complex real-world situations. The
research does however indicate that there is value in
applying intelligent control systems and other
information technology to complement human
decision makers by mitigating human weaknesses.
Our future work in this domain is focused on
incorporating the task planning agents into an
intelligent cognitive aide. The aide will draw
attention to relevant events and changes in the
environmental state. We could also use this
cognitive aide to improve training methods by
teaching decision makers to focus their attention on
the most critical plan-changing events.
We have shown it is possible to use intelligent
control systems to improve upon the results
exhibited by teams of human decision makers. Our
hope for the future is that it is possible to combine
human and robotic planning methods to yield even
better results.
ACKNOWLEDGEMENTS
The MITRE Technology Program supported the
research described here. We are also grateful for the
assistance of Brian C. Williams and Lars Blackmore
at the Massachusetts Institute of Technology.
REFERENCES
Bellifemine F., Poggi A., Rimassa G. (2001). Developing
multi-agent systems with a FIPA-compliant agent
framework. Software-Practice and Experience, 31,
103–128.
Dias M.B. (2004). TraderBots: A New Paradigm for
Robust and Efficient Multirobot Coordination in
Dynamic Environments. Doctoral dissertation,
Robotics Institute, Carnegie Mellon University,
Pittsburgh, PA, USA.
Gaimari, R., Zarrella, G., Goodman, B. (2007). Multi-
Robot Task Allocation with Tightly Coordinated
Tasks and Deadlines using Market-Based Methods.
Proceedings of Workshop on Multi-Agent Robotic
Systems (MARS).
Gerkey B. and Mataric M. (2003). Multi-robot Task
Allocation: Analyzing the Complexity and Optimality
of Key Architectures. Proceedings of IEEE
Conference on Robotics and Automation.
Goodman B., Linton F., Gaimari R., Hitzeman J., Ross H.,
Zarrella G. (2005). Using Dialogue Features to Predict
Trouble During Collaborative Learning. User
Modeling and User-Adapted Interaction, 15 (1-2), 85-
134.
Jones E., Browning B., Dias M. B., Argall B., Veloso M.,
Stentz A. (2006a). Dynamically Formed
Heterogeneous Robot Teams Performing Tightly-
Coordinated Tasks. Proceedings of International
Conference on Robotics and Automation.
Jones E., Dias M. B., Stentz A. (2006b). Learning-
enhanced Market-based Task Allocation for Disaster
Response. Tech report CMU-RI-TR-06-48, Robotics
Institute, Carnegie Mellon University.
Lagoudakis M., Markakis E., Kempe D., Keskinocak P.,
Kleywegt A., Koenig S., Tovey C., Meyerson A., Jain
S. (2005). Auction-Based Multi-Robot Routing.
Robotics: Science and Systems. Retrieved at
http://www.roboticsproceedings.org/rss01/p45.pdf
Loren, Lew. (2004, Fall). Experimentation and
Prototyping Laboratories Forge Military Process and
Product Improvements. Edge Magazine. Retrieved at
www.mitre.org/news/the_edge/fall_04/loren.html
Schneider J., Apfelbaum D., Bagnell D., Simmons R.
(2005). Learning Opportunity Costs in Multi-Robot
Market Based Planners. Proceedings of IEEE
Conference on Robotics and Automation.
Walsh W., Wellman M., Wurman P., MacKie-Mason J.
(1998). Some Economics of Market-Based Distributed
Scheduling. Proceedings of International Conference
on Distributed Computing Systems.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
154
