
HYBRID MOTION CUEING ALGORITHMS FOR REDUNDANT
ADVANCED DRIVING SIMULATORS
Hatem Elloumi, Nadia Ma
¨
ızi and Marc Bordier
Centre de Math
´
ematiques Appliqu
´
ees,
´
Ecole des Mines de Paris
2004 route des Lucioles, 06902 Sophia Antipolis Cedex, France
Keywords:
Driving simulation, motion cueing, hybrid control.
Abstract:
Redundant Advanced Driving Simulators (hexapods mounted on rails) present an extra capability to reproduce
motion sensations. The exploitation of this capability is currently done by frequency separation methods with-
out taking into account the frequency overlapping between the hexapod and the rails. Within this bandwidth,
these two degrees of freedom could be considered as equivalent. Our aim is to use this equivalence to improve
the motion restitution. We offer two algorithms based on the hybrid systems framework which deal with the
longitudinal mode. Their goal is to improve the restitution of motion sensations by reducing false cues (gen-
erated by actuators braking) and decreasing null cues (due to actuators blocking). Our algorithms include and
treat all steps of motion cueing: motion tracking (restitution), braking before reaching the displacement limits,
washout motion, and switching rules.
1 INTRODUCTION
Driving simulators are advanced devices composed of
four components: a virtual scene projected on a wide
screen to imitate the road and the traffic, an audio sys-
tem to play the driving sounds (horn, squeal of brakes,
etc.), a car cockpit (including a real dashboard, the
pedals and the seat of the driver) to copy the body
position and the interaction of the driver with a real
vehicle and finally a robot carrying the car cockpit to
provide its motion. While the first three components
could be considered as offering a sufficiently high de-
gree of realism, the robot presents a very low capacity
of displacement, thus preventing it from performing
the real car motions.
In fact, the aim of a driving simulator is not
tracking real trajectories produced by outdoors driv-
ing but reproducing the corresponding motion sen-
sations. How could we then, generate realistic mo-
tion sensations in simulation despite the constrained
robot motion? It is the aim of Motion Cueing Algo-
rithms (MCA) to give heuristically an answer to this
problem. This paper uses the hybrid systems frame-
work (Zaytoon, 2001; Van der Shaft and Schumacher,
1999) to build two MCA designed specifically for re-
dundant simulation robots. These robots are made up
of two parts:
• A Gough-Stewart parallel robot or hexapod (this
parallel robot is composed of three parts: a mov-
ing body called the platfom (carrying the car cock-
pit) linked to the base through six extensible legs.
Each leg is composed of a prismatic joint (i.e. an
electro hydraulic jack) and two passive spherical
joints making the connection with the base and
the platform. For an excellent overview of parallel
robots the reader is referred (Merlet, 2000)). The
jacks’ excursions are of ±20cm allowing a six-
dimension motion of the car cockpit up to ±15cm
(in linear directions) and up to 30deg (for rota-
tions).
• A rail system carrying the base of the hexapod to
provide an extra motion in the horizontal plane. In
this paper the rails’ limits are: ±2m.
(Elloumi, 2006) shows that rails and the hexapod
present overlapping bandwidths in the high frequency
domain. So how could we benefit from this redun-
dancy? Our approach is based on the classical MCA
which will be presented in section 3. But before ad-
dressing this point, section 2 will deal with the notion
209
Elloumi H., Maïzi N. and Bordier M. (2007).
HYBRID MOTION CUEING ALGORITHMS FOR REDUNDANT ADVANCED DRIVING SIMULATORS.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 209-216
DOI: 10.5220/0001650102090216
Copyright
c
SciTePress

surge
pitch
surge
pitch
Figure 1: The longitudinal mode.
of sensation to close the description of the simulator
objective.
Remark: The results presented here are done for
the longitudinal mode. However, they could be ex-
tended for the other space directions. The longitudi-
nal mode is composed of the surge and pitch motions
as depicted in figure 1.
2 MOTION PERCEPTION
Even in the absence of visual information (closed-eye
subject), humans detect motion thanks to their inertial
receptor: the vestibular system. Located in the inner
ear, this biological apparatus measures both linear and
angular motion of the head (a thorough description is
given in (Elloumi, 2006; Telban et al., 2000; Ange-
laki and Dickman, 2004)) if they are beyond detection
thresholds (on acceleration and speed respectively).
The motion sensation is built at the level of the
brain not only from the vestibular system informa-
tion but also from all the perception receptors (most
particularly: the eyes) cues. In this paper, as com-
monly done in driving simulation, we consider that
apart from the vestibular system, all the other sensors
receive coherent and well adapted cues. As a conse-
quence, in this paper the motion sensation will be con-
sidered as the interpretation of head displacements by
the inertial receptor.
One remarkable gain of working with motion sen-
sations instead of real trajectories (accelerations) is il-
lustrated by the tilt coordination. In driving (or flight)
simulation, a simultaneous rotation of the driver’s
head and the visual scene at a very slow rate happens
to create an illusion of linear acceleration: ”When a
visual scene representing an accelerated translation
is presented to the driver while the simulation cockpit
is tilted at an undetectable rate, the relative variation
of the gravity vector will be partly interpreted as an
actual linear acceleration” (Reymond et al., 2002).
Thus from a control point of view, the tilt coordination
leads to a low-frequency motion sensation through a
very small variation of the jacks’ displacement as we
shall see in the next section.
Scaling Saturation
High Frequency
Filtering
real
acceleration
treated
acceleration
Scaling Saturation
High Frequency
Filtering
real
acceleration
treated
acceleration
Figure 2: Preliminary treatments for the classical MCA.
3 CLASSICAL MOTION CUEING
ALGORITHM
This scheme was developed in 1970 by (Parrish et al.,
1975). Despite its simplicity, this algorithm displays
the importance of tilt coordination to restitute longitu-
dinal accelerations. This scheme is based on the sim-
ple observation that the simulator translation is very
limited so that only fast (onset) accelerations could be
tracked. Consequently, the principle of this method is
to use filtering to extract from the real car accelera-
tion the high frequency component and address it to
the robot translation. Hopefully, the tilt coordination
enables the reproduction of slow (sustained) accelera-
tions. Filtering (low frequencies) is performed to sup-
ply the tilt rotation as well. As for the restitution of
the rotation speed, high pass filtering is performed to
deal with angular limits.
The classical MCA is a linear approach which is
commonly preceded by some preliminary treatments
of the real accelerations to cope with robot motion
limits (see figure 2).
4 THE REDUNDANCY PROBLEM
Restituting longitudinal acceleration on redundant
simulators could be done thanks to three degrees of
freedom (dof) as depicted in Fig.3: the base transla-
tion (X) (performed by the rails), the hexapod trans-
lation (x) and the tilt coordination (θ : tilt angle)
(both performed by the jacks). As shown in (Elloumi,
2006), the behavior of the last dof is independent from
the first two as the rotation due to the tilting is limited
by a very low detection threshold.
As a consequence, in order to improve the qual-
ity of motion cueing only the translations behaviors
should be considered. The considered linear acceler-
ation
1
provided to the driver by the simulation robot
is then:
¨
X + ¨x .
Besides as the rails and jacks bandwidths are over-
lapping in the high frequencies domain, these two dof
could be considered as equivalent. How could we
1
The tilt coordination contribution gθ (where g is the
gravity magnitude) is omitted from the hybrid algorithms
that we shall present (but could be added outside these al-
gorithms).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
210

then exploit this equivalence? We offer two algo-
rithms based on the hybrid systems framework which
use only one translation at a time and a switching
strategy to cope with the limits.
Figure 3 shows these two translations: hexapod
translation (x) and base translation (X) each con-
strained by three levels of limitation: position, speed
and acceleration ±ξ
L
, ±
˙
ξ
L
, ±
¨
ξ
L
(ξ ∈ {x, X}). The
models ruling the variation of ξ ∈ {x, X} are lin-
earized models (double integrators):
¨
ξ = u
ξ
, ξ ∈ {x, X} (1)
where u
ξ
is the reference acceleration (control). As
these dof are limited, we have to define two strate-
gies: a braking strategy (triggered when nearing the
limits) and a washout strategy (going back to a neu-
tral position) strategy (once braking has been done).
4.1 Braking Strategy
In this paper we adopted the parabolic braking (con-
stant braking acceleration
¨
ξ
b
) in order to stop the
translation at its limits ±ξ
L
(null speed
˙
ξ = 0). The
triggering condition is then:
˙
ξ
2
− 2
¨
ξ
b
(ξ
L
− |ξ|) ≥ 0, ξ ∈ {x, X} (2)
The braking acceleration
¨
ξ
b
determines the free zone
(braking-free zone) size. The higher
¨
ξ
b
is the bigger
is the free zone. Nevertheless, the incoherent sensa-
tions would be strong in this case. At the opposite,
choosing this acceleration to be as low as the detec-
tion threshold (0.05ms
−2
) would considerably reduce
the braking sensations and would noticeably reduce
the free zone at the same time.
We have studied the influence of this parameter on
the ratio between the free zone volume and the theo-
retically available one. As the phase profile (speed
and position) is independent from the acceleration
value, this ratio is equal to the ratio between the sur-
faces of the phase profiles. The theoretical surface is
S
theo
= 4ξ
L
˙
ξ
L
and the free zone surface is:
S
free
=
16
3
ξ
3
2
L
q
¨
ξ
b
if 0 ≤
¨
ξ
b
<
1
4
˙
ξ
2
L
ξ
L
4
h
ξ
L
−
1
4
˙
ξ
2
L
¨
ξ
−1
b
i
˙
ξ
L
+
2
3
˙
ξ
3
L
¨
ξ
−1
b
otherwise
(3)
The ratio S
free
/S
theo
is saturated starting from a cer-
tain braking acceleration
¨
ξ
b
. In other words, starting
from this point, the magnitude of
¨
ξ
b
wouldn’t have
a significant impact on the free zone size. However,
the braking duration
˙
ξ
0
¨
ξ
−1
b
(bounded by
˙
ξ
L
¨
ξ
−1
b
) will
keep decreasing.
4.2 Washout Strategies
The goal of the washout is to bring the translation to
its neutral position (ξ,
˙
ξ) = (0, 0). We present two
washout strategies:
4.2.1 Known Starting Point
In this case the backward motion starts at (ξ,
˙
ξ) =
(±ξ
L
, 0), the chosen washout control is:
u
ξ
= −sign(ξ)
a
r
if
ξ
L
2
≤ |ξ| ≤ ξ
L
−a
r
if 0 ≤ |ξ| ≤
ξ
L
2
(4)
Taking a
r
= a
threshold
= 0.05ms
−2
would make
this motion imperceptible. Finally, the duration of this
strategy is: 2
p
ξ
L
a
−1
r
.
4.2.2 Unknown Starting Point
In this case the backward motion starts at an unknown
point (within the limits). The control is then a Propor-
tional Derivative (PD):
¨
ξ = −µ
˙
ξ − kξ (5)
The parameters (µ, k) have to be chosen so that the
motion limits are respected.
These definitions of braking and washout tech-
niques enable us to present our hybrid algorithms.
5 SYMMETRIC ALGORITHM
The principle of the symmetric algorithm is to use
only one translation at a time. When the active trans-
lation reaches its limits, switching will be performed
to activate the idle dof. In other words, both trans-
lations reproduce the reference acceleration as relay
runners.
In non redundant simulators (without rails), when
the hexapod translation is close to its limits, braking
and washout will be successively triggered. The op-
erator has to wait until these two operations finish in
order to get back coherent motion cues. The symmet-
ric algorithm will speed up the reactivation of the ac-
celeration restitution by using the idle translation dur-
ing the washout (impercebtible) motion of the active
one. This algorithm is called symmetric because both
translations have the same role in the motion cueing
process.
In order to represent the symmetric algorithm as a
hybrid automaton, two points have to be defined: the
working modes and the rules of correct operation.
HYBRID MOTION CUEING ALGORITHMS FOR REDUNDANT ADVANCED DRIVING SIMULATORS
211

tilt coordination hexapod translation base translationtilt coordinationtilt coordination hexapod translationhexapod translation base translationbase translation
Figure 3: The redundancy of the longitudinal acceleration restitution.
Working Modes
In the case of the symmetric algorithm, both transla-
tions (X and x) have the same working modes:
1. active: the dof ξ tracks the treated reference ac-
celeration
2. brake: parabolic braking
3. washout: known starting point
4. idle: null acceleration
Rules of Correct Operation
By defining these rules we characterize the way the
hybrid automaton works. In our case, these rules are
valid for both translations:
1. braking must lead to the limit position with a null
speed
2. braking must be followed by a washout motion
3. washout must lead to the neutral position with a
null speed
4. reactivating one dof could be done only starting
from the neutral position (with a null speed)
5. if one dof is braking, the other one mustn’t be ac-
tive. The braking sensations could deteriorate in-
deed the quality of the free dof restitution
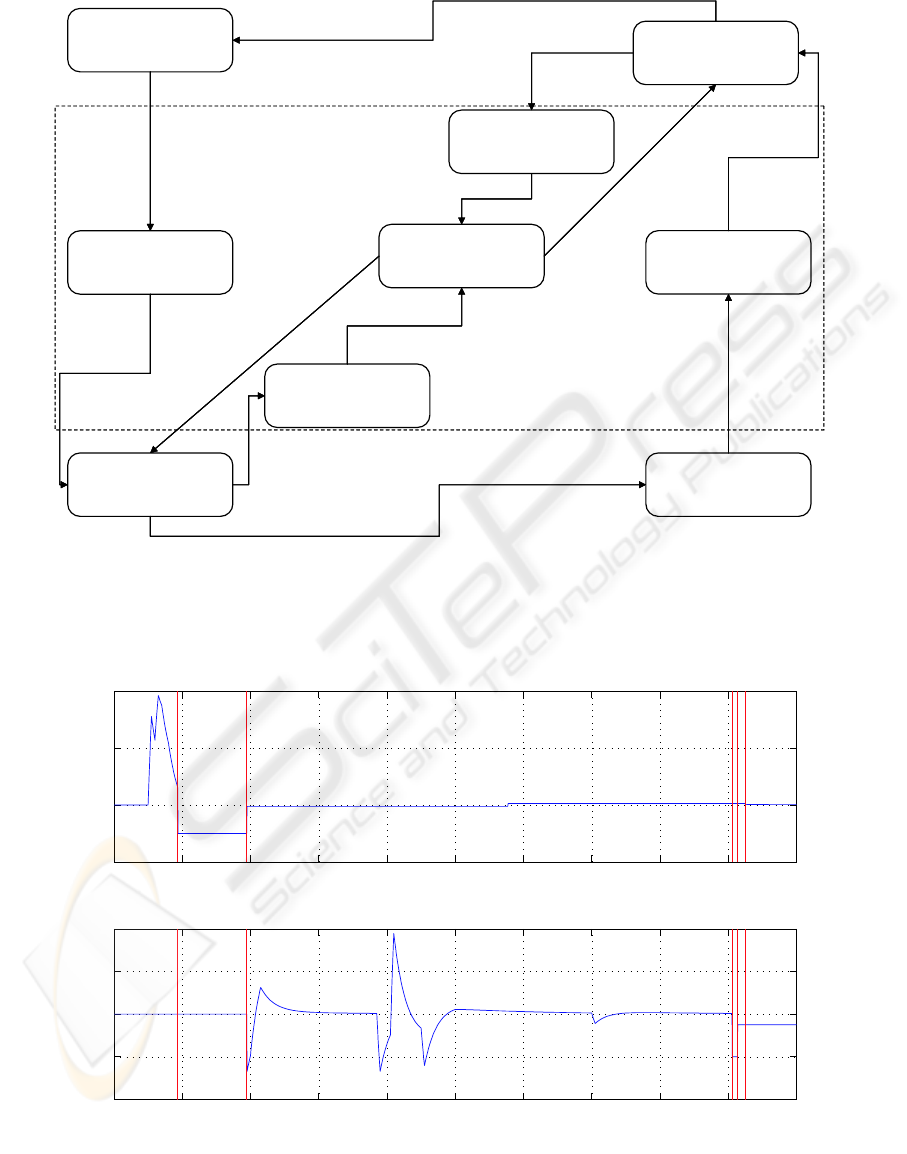
5.1 The Symmetric Automaton
Figure 4 shows the symmetric automaton (we ob-
serve a central symmetry around the state (Hexapod:
washout, Rail: washout)). Three types of transition
predicates appear:
• hexa=0 (or rail=0) i.e. the dof has attained
the neutral position (ξ,
˙
ξ) = (0, 0)
• decl
hexa (or decl rail) i.e. the braking
condition is fulfilled (see (2))
• lim
hexa (or lim rail) i.e. that an extreme
position (ξ,
˙
ξ) = (±ξ
L
, 0) has been attained
If we consider that braking is instantaneous then this
automaton could be reduced to the four states outside
the dashed box i.e. an alternation between the activa-
tion and the washout for both translations. The states
inside the box take into account the parabolic braking
and the subsequent activation of the washout.
5.2 Simulations
Matlab/Simulink and Stateflow were used to perform
simulations. The initial state was chosen to be (Rail:
active, Hexapod: idle). The reference acceleration
profile was extracted from the Renault simulations
in (Dagdelen, 2005). The parameters values used in
these simulations are :
¨
X
b
= 1ms
−2
, ¨x
b
= 0.2ms
−2
and a
r
= 0.05ms
−2
for both dof. Transition times
are indicated by vertical lines. In figure 5, we can dis-
tinguish 6 working phases:
• (Rail: active, Hexapod: idle)
• (Rail: brake, Hexapod: idle)
• (Rail: washout, Hexapod: active)
• (Rail: washout, Hexapod: brake)
• (Rail: washout, Hexapod: washout)
• (Rail: active, Hexapod: washout)
6 MASTER-SLAVE ALGORITHM
In this algorithm the roles played by the two transla-
tions are asymmetric. One dof is the master i.e. re-
sponsible for restituting the motion. The other dof is
the slave which has to counterbalance the ”bad” mas-
ter behaviors. It consists in producing opposite accel-
erations to the master’s when the latter brakes or goes
back to the neutral position (washout).
Working Modes
The working modes are different for each translation.
The master’s modes are:
1. active: the master dof tracks the treated reference
acceleration
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
212
Rail: active
Hexapod: idle
Rail: brake
Hexapod: idle
Rail: idle
Hexapod: active
Rail: washout
Hexapod: washout
Rail: washout
Hexapod: brake
Rail: washout
Hexapod: active
Rail: idle
Hexapod: brake
Rail: active
Hexapod: washout
Rail: brake
Hexapod: washout
decl_raildecl_rail
lim_raillim_rail
rail=0rail=0
decl_hexadecl_hexa
lim_hexalim_hexa
lim_hexalim_hexa
lim_raillim_rail
decl_raildecl_rail
decl_hexadecl_hexa
hexa=0hexa=0
r
ail=0
r
ail=0
hexa=0hexa=0
Dealing with the limits
Figure 4: The symmetric automaton.
0 2 4 6 8 10 12 14 16 18 20
0.4
0.2
0
0.2
0.4
Hexapod
time(s)
Acceleration (m/s
2
)
0 2 4 6 8 10 12 14 16 18 20
2
0
2
4
Rail
time(s)
Acceleration (m/s
2
)
Figure 5: Simulation of the symmetric algorithm.
HYBRID MOTION CUEING ALGORITHMS FOR REDUNDANT ADVANCED DRIVING SIMULATORS
213

2. brake: parabolic braking
3. quick-washout: known starting point
4. washout: unknown starting point and unde-
tectable
5. idle: null acceleration
The slave’s modes are:
1. counter-brake: the slave dof tracks the accelera-
tion opposite to the master’s parabolic braking one
2. counter-washout: the slave dof tracks the acceler-
ation opposite to the master’s quick washout one
3. brake: parabolic braking
4. washout: unknown starting point and unde-
tectable
5. idle: null acceleration
Rules of Correct Operation
1. braking of both translation (master and slave)
must lead to the limit position with a null speed
2. braking must be followed by a washout motion.
The master’s washout is quick only if the slave is
within its free zone
3. the master could be (re)activated only starting
from its neutral position (the slave mustn’t be in
the braking mode)
4. after the counter-washout mode, the slave starts a
washout motion to its neutral position
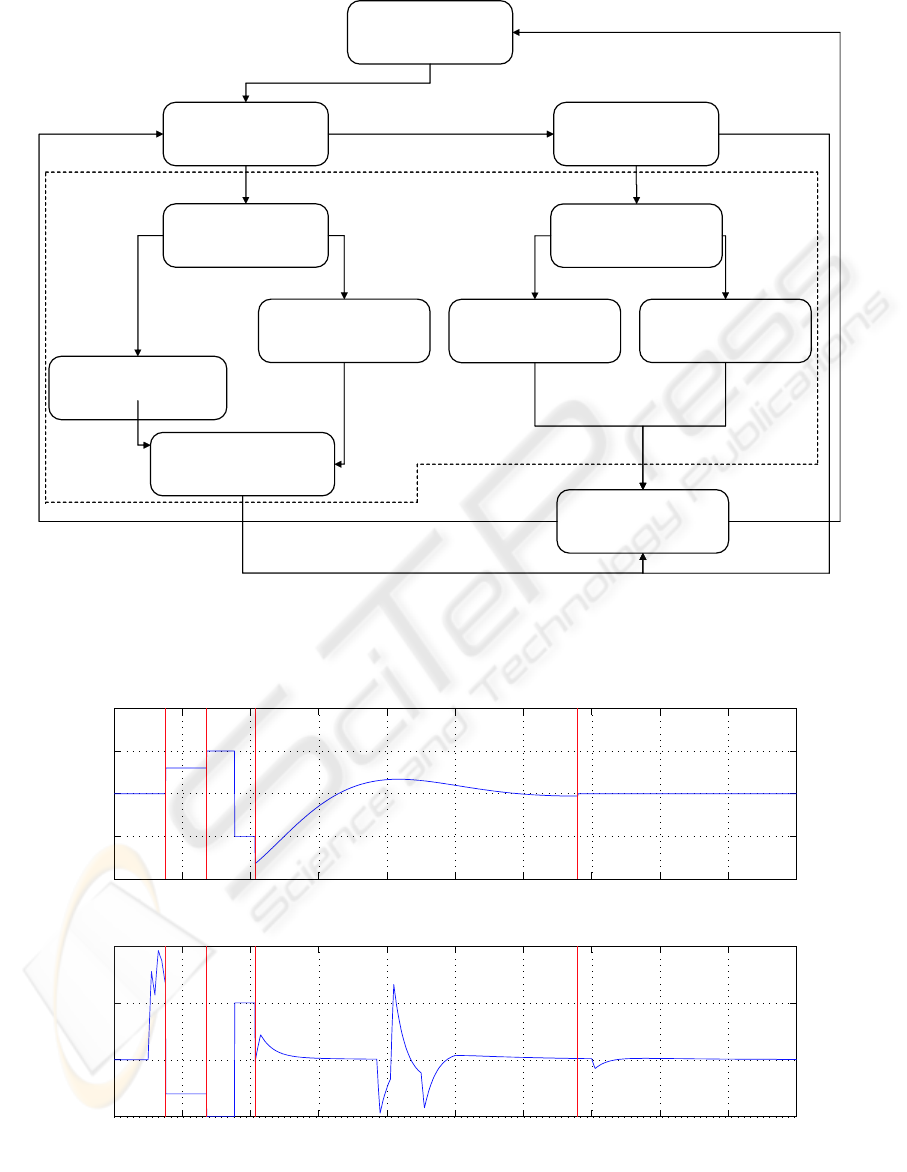
6.1 The Master-slave Automaton
Figure 6 shows the master-slave automaton. The tran-
sitions have the same signification as for the symmet-
ric automaton. Similarly, if we consider that braking
is instantaneous then this automaton could be reduced
to these subsequent states:
• Initial state: (Master: active, Slave: idle)
• (Master: brake, Slave: counter-brake): when
nearing the limits, the master brakes. The slave
provides the opposite acceleration so that the total
acceleration (perceived by the driver) is null.
• (Master: quick-washout, Slave: counter-
washout): after the master’s braking, a quick mo-
tion brings it to its neutral position. The slave
counterbalances this motion so that the overall ac-
celeration is null again.
• (Master: active, Slave: washout): the master
is reactivated once reaching its neutral position.
The slave starts the washout in order to improve
its future capacity of compensation. From this
state two permutations could occur: going back
to the initial state if the slave washout has finished
or switching to (Master: brake, Slave: counter-
brake) if the master reaches once again its limits.
The dashed box integrates all the states that describe
the automaton behavior when the slave couldn’t per-
form its counterbalancing role. It happens when the
slave reaches its limits and has to break. In this case,
the hybrid automaton starts a backward motion of
both dof that ends by going back to the initial state.
6.2 Simulations
The reference acceleration profile is the same as be-
fore (scaled at 50% for a better visualisation). Rails
were chosen to be the slave whereas the hexapod
translation is chosen to be the master. In fact, as the
rails motion capacity is higher than the hexapod one,
the former is better suited to play the compensation
(slave) role.
The algorithm parameters are: braking (and
counter-braking) acceleration 0.3ms
−2
, quick
washout (and counter-washout) acceleration
0.5ms
−2
and slave braking acceleration 0.6ms
−2
.
As for the slave washout, µ and k were chosen to be
τ
−1
and τ
−2
where τ = 1.45s. Figure 7 shows the
simulation results. We can distinguish 5 phases:
• (Hexapod: active, Rail: idle)
• (Hexapod: brake, Rail: counter-brake)
• (Hexapod: quick washout, Rail: counter-
washout)
• (Hexapod: active, Rail: washout)
• (Hexapod: active, Rail: idle)
7 CONCLUSION
In this paper we have presented two motion cueing
algorithms based on the hybrid systems framework.
These two algorithms exploit the redundancy of the
simulators to maintain the reproduction of motion
sensations despite the robot displacement limitations.
The symmetric algorithm presents a reliable ini-
tial restitution. However it generates incoherent sen-
sations due to significant braking magnitudes. The
Master/Slave algorithm has a lesser restitution capac-
ity but it reduces considerably bad sensations by pro-
viding a full compensation (null sensations at the level
of the driver) of braking and washout motions.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
214
Master: active
Slave: idle
Master: brake
Slave: counter-brake
Master: quick-wash.
Slave: counter-wash.
Master: brake
Slave: brake
Master: washout
Slave: brake
Master: brake
Slave: washout
Master: washout
Slave: washout
Master: washout
Slave: brake
Master: idle
Slave: brake
Master: washout
Slave: washout
Master: active
Slave: washout
slave=0
decl_master
lim_master master=0decl,master
decl_slave
lim_slave
lim_master
lim_slave
lim_master
master=0
lim_slave
master=0
lim,slave
master=0
decl_slave
Dealing with the limits
Figure 6: The master-slave automaton.
0 2 4 6 8 10 12 14 16 18 20
0.5
0
0.5
1
Hexapod : Master
time(s)
Acceleration (m/s
2
)
0 2 4 6 8 10 12 14 16 18 20
1
0.5
0
0.5
1
Rail : Slave
time(s)
Acceleration (m/s
2
)
Figure 7: The master-slave simulations.
HYBRID MOTION CUEING ALGORITHMS FOR REDUNDANT ADVANCED DRIVING SIMULATORS
215

REFERENCES
Angelaki, D. and Dickman, J. (2004). Gravity or transla-
tion: Central processing of vestibular signals to detect
motion. Journal of Vestibular Research.
Dagdelen, M. (2005). Restitution des stimuli inertiels en
simulation de conduite. PhD thesis, Ecole des Mines
de Paris - Renault.
Elloumi, H. (2006). Commande des plate-formes avances
de simulation de conduite. PhD thesis, Ecole des
Mines de Paris, Centre de Math
´
ematiques Appliqu
´
ees.
Merlet, J. (2000). Parallel Robots. Kluwer Academic Pub-
lishers.
Parrish, R., Dieudonne, J., and Martin Jr., D. (1975). Coor-
dinated adaptive washout for motion simulators. Jour-
nal of Aircraft.
Reymond, G., Heidet, A., Canry, M., and Kemeny, A.
(2002). Validation of Renault’s dynamic simulator for
adaptive cruise control experiments. Driving Simula-
tion Conference.
Telban, R., Cardullo, F., and Guo, L. (2000). Investigation
of mathematical models of otolith organs for human
centered motion cueing algorithms. In AIAA Modeling
and Simulation Technologies Conference, Denver CO.
Van der Shaft, A. and Schumacher, H. (1999). An intro-
duction to hybrid dynamical systems. Springer-Verlag,
Lecture Notes in Control, 251.
Zaytoon, J. (2001). Syst
`
emes dynamiques hybrides. Hermes
Sciences Publications.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
216
