
A SIMULATION STUDY OF THE NEW CONCEPT
OF A STAIR-CLIMBING WHEELCHAIR
Concept of Construction
Grzegorz Dobrzynski, Wlodzimierz Choromanski and Jerzy Kowara
Warsaw University of Technology, Faculty of Transport, Koszykowa 75, 00-662 Warsaw, Poland
Keywords: CAD, simulation study, stair-climbing wheelchair.
Abstract: The authors present an idea of construction, modelling and simulation studies of a new generation,
mechatronical wheelchair. The wheelchair is meant to drive on various surfaces. Its important feature is the
possibility to overcome obstacles, such as a doorstep of max. 220 mm. The construction model and
simulation studies were carried out in the environment of MBS ADAMS package. An algorithm of
controlling the process of overcoming the doorstep was proposed and an analysis of parametrical sensitivity
of the construction was performed.
1 INTRODUCTION
Modern transport systems should be created with
appropriate observance of the needs of the disabled.
At the design stage, special attention should be paid
to the needs of people with mobility problems. For
these people, important elements of the transport
system include: architectural features, specially
adapted public means of communication, and
individual means of transport (Axelson, 1995),
(Blachowski, 1993). A wheelchair with special
transport features is an important element in the
whole system. The development of the motor
industry led to a dramatic increase of accidents,
which in turn increased the number of people
suffering from permanent disability or impairment
of their movement capabilities. The feedback
received from the disabled clearly suggests that there
are still many barriers that make it difficult for these
people to function individually in society.
Irrespective of the laws in force, the number of
buildings that are not adapted for the disabled is
large. And the adaptation process is long and
expensive. What could help the disabled to
overcome architectural obstacles is a new
wheelchair with special functions, such as moving
up and down the stairs or lifting the disabled person
to such a height that is achievable by a healthy
individual.
This paper presents assumptions and preliminary
simulation tests of a new concept of a wheelchair for
people with motion disabilities. The goal of the
simulation model is first of all to optimize the
wheelchair's parameters in order to achieve the most
desirable safety and ergonomic conditions. The main
advantage of the wheelchair will be its ability to
overcome terrain obstacles, such as thresholds, stairs
or curbs, or lifting the user to heights that are
achievable by healthy people. The wheelchair will
be able to drive into a low-deck bus or tram on its
own. Furthermore, its construction will be simple
and spatially limited.
2 THE CONCEPT OF A
STAIR-CLIMBING
WHEELCHAIR
The concept is presented in the form of a 3D picture
(Fig. 1). The wheelchair can move over flat surfaces,
as well as thresholds, stairs and curbs. The drive
system of the wheelchair consists of two electric
motors (4). The vehicle changes its direction by
means of differentiating the speed between the two
motors. The wheelchair systems are powered by two
service-free gel batteries, 12 V, 2 x 40 Ah. The
batteries are located relatively low to achieve the
most advantageous location of the centre of gravity.
Beneath the seat, there is a seat lifting mechanism
(1). The seat lifting mechanism is connected with the
system to correct the inclination of the seat while
driving through an obstacle. The rear part of the
wheelchair features an arm that can lift the
143
Dobrzynski G., Choromanski W. and Kowara J. (2008).
A SIMULATION STUDY OF THE NEW CONCEPT OF A STAIR-CLIMBING WHEELCHAIR - Concept of Construction.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 143-146
DOI: 10.5220/0001048701430146
Copyright
c
SciTePress

wheelchair over an obstacle (8). It is driven by a
motor module with a gear (6). Distance measuring
systems play an important role when the wheelchair
is moving over an obstacle. There are two such
systems: a front one (5) and a rear one (7). The slide
skid (2) also proves useful in negotiating obstacles.
Figure 1: Wheelchair contraction model – own concept.
The wheelchair features two drive modes: "normal"
and "obstacle". The normal mode is used to drive on
flat or slightly uneven surfaces. The user has two
gears to choose from: I and II. The first gear (I)
allows the wheelchair to drive with the maximum
speed of 3 km/h. It is meant to be used in small
compartments or rooms. One of the benefits of using
the first gear is that it makes steering the wheelchair
much easier. Gear II is to be used for greater
distances. It also requires a greater precision in
handing the steering lever.
The wheelchair also features a lift function. It
lifts the seat to a higher level, which is important for
disabled people.When the lift function is activated,
the wheels of the wheelchair are blocked and driving
is not possible. An audible signal will be introduced
to remind the user that the lift function has been
activated.
3 OPERATIONAL PARAMETERS
AND ALGORITHM FOR
OVERCOMING OBSTACLES
The following operational parameters were assumed
for the initial phase of the project:
• Threshold height (max) 0.22 m
• Threshold depth (min) 0.25 m
• Battery 12V, 2 x 40 Ah,
• Battery weight 24 kg
• Autonomy (working time) 5 hours
• Load bearing capacity 100 kg
• Weight 80 kg
• Min. space required for manoeuvring 1.1x1.1m
• Gear I speed 1 m/s
• Gear II speed 2 m/s
• Mean speed while overcoming stairs 0.1 m/s
• Minimum width of staircase 0.8 m
• Maximum surface inclination 35°
• Seat lift height 0.45 m
The above-mentioned values result from an analysis
of specific features of the wheelchairs currently
available on the market. These values are subject to
minor modifications (Kowara, 2005), (Milanowska,
1997).
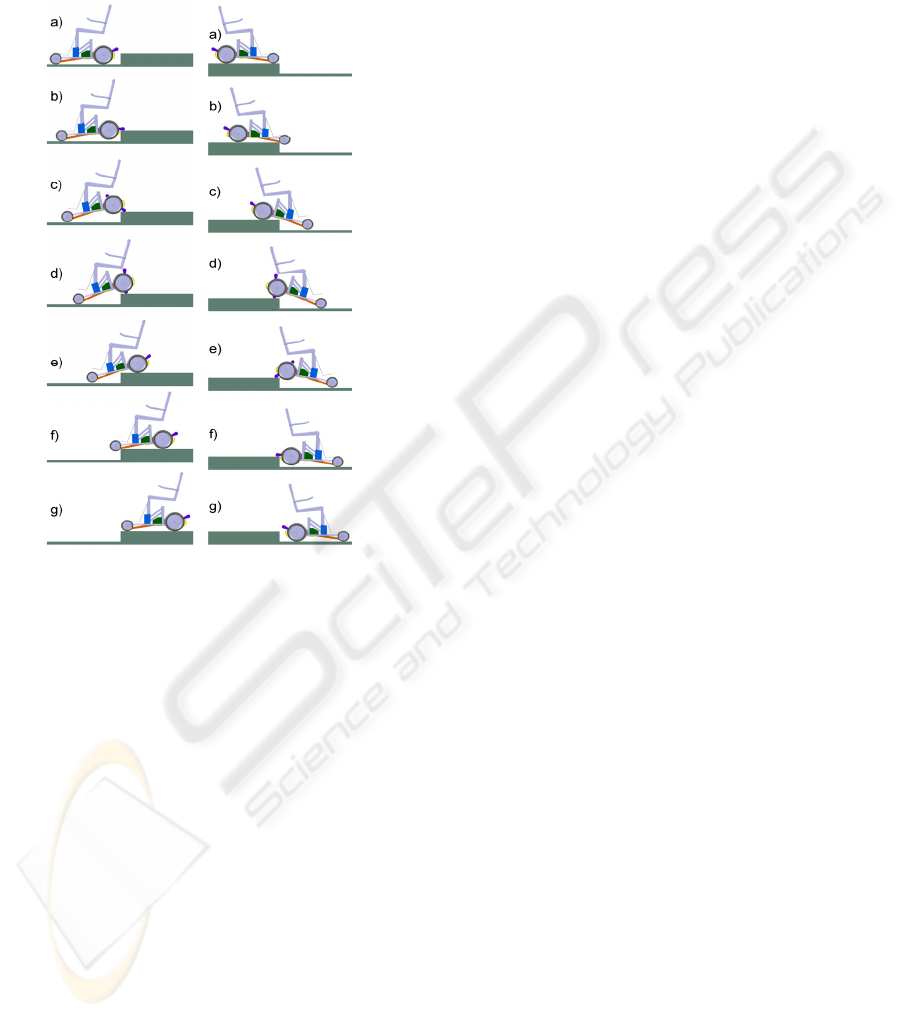
The algorithm used to overcome obstacles that is
presented here explains the principles of operation of
the construction described in the above paragraph.
The ascending phases (Fig. 2.) will be carried out in
the same manner if the wheelchair has several stairs
to overcome: when Phase e) is completed, the
system will carry on to Phase a) again. It will
operate through all the phases in a closed loop until
all stairs have been overcome. Descending the stairs
(Fig. 2) will look exactly the same as descending a
singular threshold. It will be carried out in a closed
loop: when Phase g) is completed, the system will
start from Phase c) again.
Ascending an Obstacle. To overcome an obstacle
higher than 5 cm, the obstacle should be approached
backwards, i.e. with the back of the wheelchair.
When the user approaches an obstacle, such as a
curb or stairs, he or she switches the driving mode to
"obstacle". The speed of the main motors is reduced
and the systems detecting distances are activated
(Fig. 2, Phase a). The steering system brings the
wheelchair to the appropriate distance from the edge
of the obstacle and positions the wheelchair
perpendicularly to it. Then, Phase b) starts. Main
drive motors are de-activated and the drive wheels
are blocked. The lift arm starts operating. Moving to
subsequent Phases c) and d), the steering system
controls the seat and keeps it horizontally. Phase e)
starts when the lift arm makes a 180°- turn. The
main drive motors are activated again and, at a
reduced speed, bring the wheelchair onto the
obstacle. The distance measuring systems keep
checking if there is another obstacle for the
wheelchair to overcome (such as another stair). In
case there is another stair, the whole cycle starts
form Phase a). When the last stair has been
overcome, the wheelchair moves backwards at a
reduced speed. During Phase f), the edge of the
obstacle moves over the slide skid and the front
wheels are mounted onto the obstacle. At the end of
Phase g), the user switches the driving mode back to
"normal".
Descending an Obstacle. Preparing to descend an
obstacle, the wheelchair should be driven up to the
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
144
obstacle with the wheelchair front positioned
perpendicularly to the edge of the obstacle. The
"obstacle" mode should be used when the height of
the obstacle (stair or threshold) is higher than 5 cm.
It is the user who decides to switch to this mode of
driving.
Figure 2: Ascending and descending an obstacle–
algorithms of operation.
When the "obstacle" mode is activated (Phase a), the
speed of the main drive motors are reduced and the
distance measuring systems, located between the
front and the rear axes of the wheelchair, start to
operate. Watching the position of the wheelchair
skids, the steering system corrects the direction of
the wheelchair movement (Phase b). Continuing the
descending movement, the distance measuring
system stops the main drive motors at an appropriate
moment (Phase c). Then, Phase d) begins. The drive
wheels are blocked. The lift arm starts to operate.
Moving to subsequent Phases e) and f), the steering
system controls the seat and keeps it horizontally.
Phase g) starts when the lift arm makes a 180°- turn.
The main drive motors are activated again and, at a
reduced speed, bring the wheelchair down the
obstacle. The distance measuring systems keep
checking if there is another obstacle for the
wheelchair to overcome (another stair). In case there
is another stair, the whole cycle starts form Phase d).
When the last stair has been overcome, the
wheelchair moves on at a reduced speed. At the end
of Phase g), the user switches the driving mode back
to "normal".
4 ASSUMPTIONS FOR
BUILDING A SIMULATION
MODEL
There is a huge variety of wheelchairs available on
the market. Designers strive to achieve the most
functional prototype, maintaining the most crucial
features, such as low weight, simple and comfortable
operation, and first of all: low price. The last aspect
is very important in making the wheelchair available
to a wide spectrum of the disabled who, very
frequently, do not belong to the wealthiest groups of
the society. To meet all these requirements, one
must look for new methods of wheelchair designing
and modelling. The literature available suggests that
most research carried out in this field concentrates
on determination the strength and resistance of the
wheelchair construction, so that relevant safety
standards and technical requirements are complied
with. The majority of solutions focus on improving
the form of additional equipment to be installed in
the wheelchairs to overcome surface obstacles. They
are developed without the use of computer
simulation or dynamic tests.
The overview of the literature on wheelchairs able to
overcome such obstacles as stairs or thresholds
(Zabłocki, 2002), as well as simulation studies of
simple constructions carried out in 2D-Working
Model environment, shows the capabilities and
limitations of this kind of vehicles. Due to the fact
that one of the priorities of the model this study
refers to is a simple and compact construction with
due observance of the other requirements, an
analysis of various systems used for overcoming
obstacles of the threshold type led to the
development of the structural concept presented in
Chapter 3. An initial analysis of the systems lets the
authors believe that the construction secures safe
overcoming of obstacles and at the same time is
simple and compact. For the purpose of the
simulation tests, certain simplifications were made:
• The human model is represented by a number of
permanently fixed solids with certain weight
parameters.
• The human model is fixed to the seat.
• The surface on which the wheelchair moves is flat
and horizontal.
• There is no friction between the front wheels and
the front frame on the one hand, and the ground
surface and the obstacle edges on the other hand.
A SIMULATION STUDY OF THE NEW CONCEPT OF A STAIR-CLIMBING WHEELCHAIR - Concept of
Construction
145
• Ascending an obstacle, the wheelchair is
positioned backwards to it.
The position of a human body's centre of gravity in
the sitting position is an important variable in a
simulation model of the construction. A real human
body, as well as its individual elements, is a complex
system with a continuous distribution of mechanical
properties. Therefore, human body modelling as
such is a vast area of science and the subject of a
number of research projects. In this project, the
approximate mass parameters of a human body
model were chosen on the basis of data used in the
research on car seats, and the model developed with
the use of statistical data (Seireg & Arvikar, 1989),
applied to analyze and simulate human walking.
Using the above mentioned data, together with the
recommendations made in PN ISO 7176-11
Standard, "Test dummies", the authors developed a
body model of an average man of 78.5 kg in the
sitting position. Catia system was used for this
purpose.
Geometrical parameters of the wheelchair under this
project were based on the measurements of an
Explorer wheelchair carried out by the authors, as
well as data found in the literature available.
When the wheelchair is in operation, certain
parameters may change. It can be assumed that this
has an impact on the performance of the wheelchair-
user configuration while the wheelchair is in motion.
To verify such a hypothesis, these variables need to
be identified and their impact on the configuration
performance needs to be assessed. Due to a vast
number of various factors having an impact on the
performance of the wheelchair-user configuration,
only certain parameters were selected for further
tests (i.e. those parameters that can significantly
influence the performance of the vehicle while
overcoming an obstacle):
• Friction between the wheels and the surface
• Obstacle height
• Distance of the user's centre of mass from the
back support
• Obstacle approach angle.
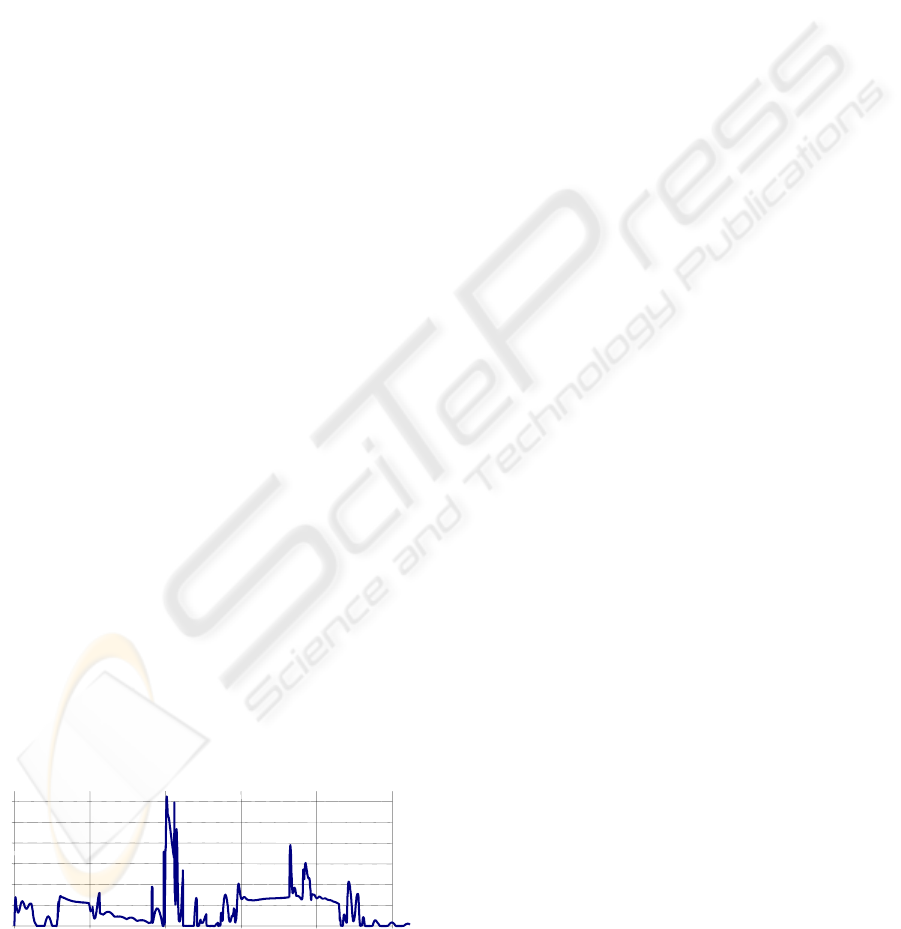
The variability of the power intake by the wheelchair during obstacle overcomin
g
0
100
200
300
400
500
600
0
1
2
3
4
5
t[s]
powe
r
[W]
Figure 3: The variability of the power intake by the
wheelchair during obstacle overcoming.
The scope of variability of individual parameters
will be determined during simulation tests.
Examples of simulation results are presented below.
The variability of power consumption while
overcoming a 220 mm obstacle was determined.
5 CONCLUSIONS
The paper presented a constructional concept and
simulative studies of a new generation wheelchair
for motional disabled persons. Taking in
consideration the wide range of studies and analyses
the new construction is submitted to before it can be
introduced into production, it should be
acknowledged that this paper could be very helpful
when creating the real wheelchair construction.
The most important elements of that study include:
• A study of the advanced schema of wheelchair
construction,
• a study of the nominal model of the
construction above,
• a proposal of the control algorithm when
coming across a barrier,
• a construction of the simulative model in the
Adams program.
ACKNOWLEDGEMENTS
The work was covered by a grant of The National
Foundation for the Rehabilitation of the Disabled
for the study on the construction and implementation
series of stabilisers.
REFERENCES
Axelson P. March/April (1995), Chair and chair alike?,
Sports’n Spokes, p. 26-61.
Blachowski W. (1993), Analiza porównawcza wózków
inwalidzkich dostępnych w kraju, Artykuł z
konferencji Problemy techniki medycznej, XXIV, nr1-2.
Kowara J. (2005), Koncepcja konstrukcji i badania
symulacyjne wózka inwalidzkiego nowej generacji,
praca dyplomowa, promotor W.Choromański,
Politechnika Warszawska, SiMR.
Milanowska K.(1997), Znaczenie zwiększonej aktywności
ruchowej osób niepełnosprawnych jako czynnika
kompensującego ich sprawność psychofizyczną, Sport
szansą życia niepełnosprawnych, PSON, p. 28-30.
Zabłocki M. (2002), Metodyka projektowania urządzeń
technicznych dla osób niepełnosprawnych, WMRiT,
(rozprawa doktorska), Politechnika Poznańska.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
146
