
BACKGROUND SEGMENTATION IN MICROSCOPY IMAGES
J
. J. Charles, L. I. Kuncheva
School of Computer Science, University of Wales, Bangor, LL57 1UT, United Kingdom
B. Wells
Conwy Valley Systems Ltd, United Kingdom
I. S. Lim
School of Computer Science, University of Wales, Bangor, LL57 1UT, United Kingdom
Keywords:
Image processing, image analysis, segmentation, background removal, microscope, vignetting, microfossils,
kerogen, palynofacies, palynomorphs.
Abstract:
In many applications it is necessary to segment the foreground of an image from the background. However
images from microscope slides illuminated using transmitted light have uneven background light levels. The
non-uniform illumination makes segmentation difficult. We propose to fit a set of parabolas in order to segment
the image into background and foreground. Parabolas are fitted separately on horizontal and vertical stripes of
the grey level intensity image. A pixel is labelled as background or foreground based on the two correspond-
ing parabolas. The proposed method outperforms the following four standard segmentation techniques, (1)
thresholding determined manually or by fitting a mixture of Gaussians, (2) clustering in the RGB space, (3)
fitting a two-argument quadratic function on the whole image and (4) using the morphological closure method.
1 INTRODUCTION
Images with non-uniform background illumination
appear in various applications, e.g., in biology,
medicine, astronomy and geology. Most cases of un-
even illumination occur when taking images through
a microscope or telescope. The periphery of the im-
age is usually poorly illuminated and this is known as
vignetting. There are three main types of vignetting,
mechanical, optical and pixel. Mechanical vignetting
is caused by the physical construction of the optical
viewing device while optical vignetting is inherent in
the lens design. Pixel vignetting only occurs in digi-
tal cameras due to less light hitting a photon cell at an
oblique angle, i.e., towards the edges of the image.
The microscopy images of interest in this study
come from rock and drill cuttings and contain mi-
crofossils and other organic debris on a light back-
ground. The images are taken with transmitted light
microscopy. The concentrated light source com-
pounds the effect of vignetting causing even worse il-
lumination across the image. The background is typ-
ically brighter in the middle and darker towards the
edges.
The most common method to segment the fore-
ground from the background of an image is thresh-
olding (Otsu, 1979; Cinque et al., 2004; Sankur and
Sezigin, 2004). However, using a constant thresh-
old will result in objects of interest near the edges of
the image being lost within a “rim” labelled as fore-
ground. On the other hand, light objects in the middle
of the image will be blended with the background. In
this case global thresholding will have to be replaced
with local thresholding. To perform local threshold-
ing a background estimate is required so that an in-
dividual threshold is set for each pixel. A common
method for obtaining this estimate is to use the image
of an empty microscope slide as a template. However
a single estimate may not be suitable for all images
due to possible changes in the microscope setup. This
is why we seek a method for unique background es-
timation based solely on the image provided. It has
been shown that as the light intensity fades with the
square of the distance from the source, a quadratic
function can be used to model the illumination (Mon-
tage, 2002). Higher order surface polynomials have
also been used but, typically these are applied to im-
ages captured using techniques where vignetting is
not the cause of uneven illumination (Zawada, 2003).
These single-function models may be too coarse and
139
Charles J., Kuncheva L. and Wells B. (2008).
BACKGROUND SEGMENTATION IN MICROSCOPY IMAGES.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 139-145
DOI: 10.5220/0001070901390145
Copyright
c
SciTePress
inaccurate, especially when the foreground occupies
a substantial part of the image. The distortion in il-
lumination from a lens system has shown to be de-
scribed by the 4th power of a cosine function (Asada
et al., 1996), it is this that inspired Zawada (Yu et al.,
2004) to estimate the illumination using a hyperbolic
function. Other methods include convolving the im-
age with a Gaussian kernel (Leong et al., 2003). The
idea is to smooth the image until it is devoid of fea-
tures but retains the average intensity across the im-
age. This technique is unautomated and will need the
assistance of a human controller to set parameters and
make corrections within graphics editing software.
2 BACKGROUND REMOVAL BY
FITTING HORIZONTAL AND
VERTICAL PARABOLAS
As explained above, a quadratic function can be used
to model the illumination in an image
f(x,y) = A + Bx+Cy+ Dx
2
+ Ey
2
+ Fxy, (1)
where x and y are the pixel’s coordinates, and
f(x,y) approximates the grey level intensity of the
background at (x,y). Although theoretically sound,
this model may be too coarse for the purposes of
the background/foreground segmentation. Instead of
fitting a two-argument quadratic function, we propose
to fit multiple “horizontal” and “vertical” parabolas.
The proposed method consists of the following
steps:
(i) The grey level intensity image is split into
K
y
vertical and K
x
horizontal stripes. An example of
a horizontal stripe of a microscopy image containing
microfossils is shown in Figure 1. The intensities on
each stripe are averaged across the smaller dimen-
sion of the stripe so that a single mean line is obtained.
(ii) A parabola is fitted on each mean line using an
iterative procedure similar to that for removing back-
ground from spectra. Consider horizontal stripe i. De-
note the intensities on the mean line of the stripe by
g
i
(x), where x spans the width of the image. Using
least squares, fit a parabola z
(1)
i
(x) = a
i
+ b
i
x+c
i
x
2
to
approximate g
i
(x). As the mean line includes intensi-
ties of both background and foreground pixels, z
(1)
i
(x)
will not model the background only. Figure 2 shows
the mean line for the stripe from Figure 1. Plotted
with the dot marker is z
(1)
i
(x).
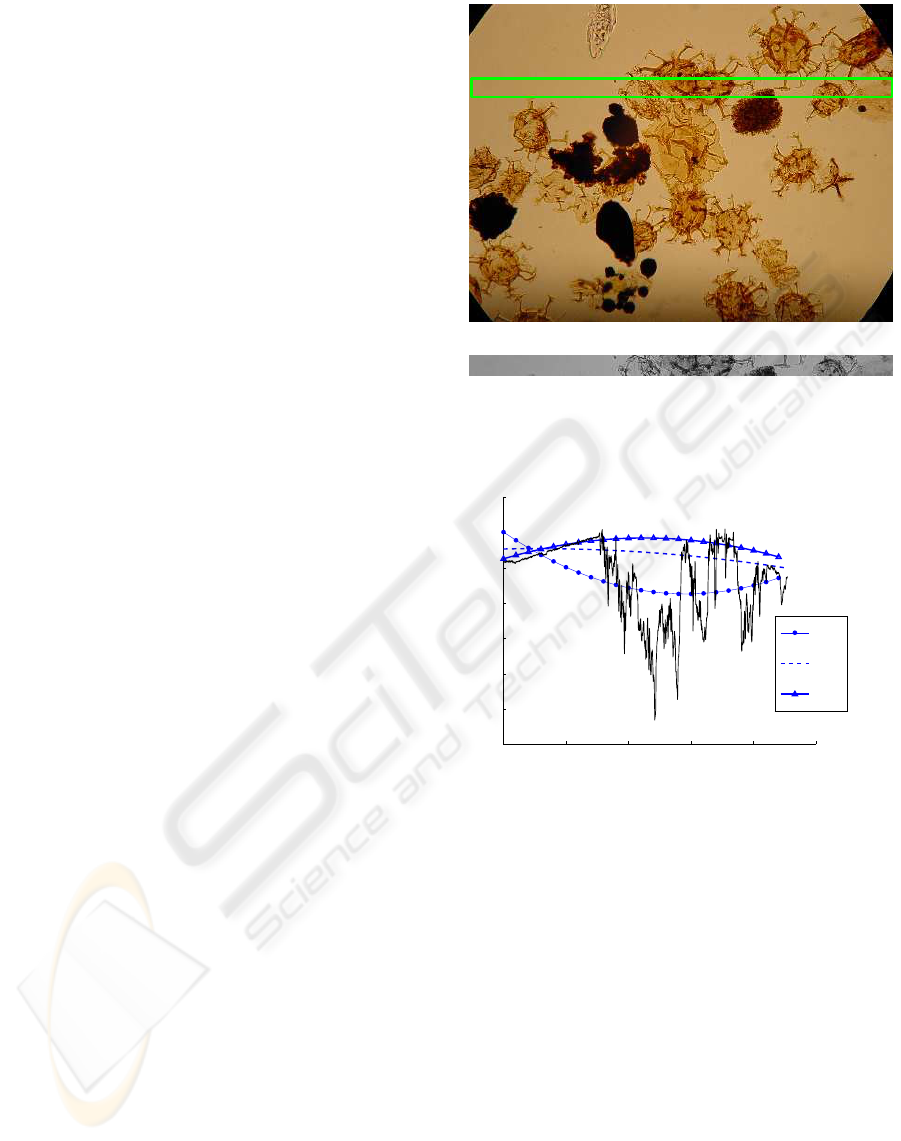
Figure 1: The original image of palynofacies and a grey
stripe cut along the x-axis.
0 500 1000 1500 2000 2500
40
60
80
100
120
140
160
180
z
(1)
z
(2)
z
(3)
image pixels
Grey level intensity
Figure 2: Grey level intensity of the mean line and the three
subsequently fitted parabolas for the stripe in Figure 1.
To exclude the foreground points, a second
parabola is fitted, denoted z
(2)
i
(x), using a reduced set
of points on the mean line
n
x
g
i
(x) > z
(1)
i
(x)
o
. By
requiring that the grey level intensity exceeds z
(1)
i
(x),
the most “certain” foreground pixels are eliminated
from the approximation. The resultant parabola
z
(2)
i
(x) is shown in Figure 2 with a dashed line. A
third iteration is carried out in the same way, this time
using the set
n
x
g
i
(x) > z
(2)
i
(x)
o
to derive z
(3)
i
(x)
(triangle maker in Figure 2). It was found empirically
that three iterations give a sufficiently good result.
(iii) Consider pixel (x,y) with grey level inten-
sity p(x,y). Let the pixel be in the i-th horizontal
stripe and j-th vertical stripe. The pixel is labelled as
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
140

foreground (object) iff
p(x,y) <
n
z
(3)
i
(x) − T
i
, z
(3)
j
(x) − T
j
o
, (2)
where T
i
and T
j
are automatically calculated thresh-
olds as explained later. Otherwise the pixel is la-
belled as background. In other words, the point must
be classed as foreground in both horizontal and ver-
tical directions in order to receive a final label as
foreground. The segmented image is obtained by la-
belling all pixels in the image in this way.
3 EXPLANATION OF THE
METHODOLOGICAL AND
PARAMETER CHOICES
I. The choice of two one-dimensional models instead
of a joint quadratic model was based on empirical
observation. The segmentation accuracy of the
joint quadratic model appeared to be compromised
for some images, arguably because of the coarse
approximation.
II. The decision to divide the image into
stripes was dictated by the large computational
demand should each horizontal and vertical
line be processed in turn. We found empir-
ically that K
x
= ceiling(No. Rows/40) and
K
y
= ceiling(No. Columns/40) is a good com-
promise between accuracy and speed.
III. The need to combine the horizontal and
vertical labelling with an “and” operation (equivalent
to making the decision by equation (2)) is explained
below. Some images contain a large proportion of
objects located at the centre. This may cause the
parabola to be a trough rather than a hill even after the
third iteration (z
(3)
i
(x)). Then the edges of the image
will be mislabelled as foreground. It is unlikely
that the same will happen to the orthogonal stripe
that runs across that edge. If a pixel is labelled as
background in that stripe, the overall label assigned
by (2)) will be corrected to “background”. Figure
3 shows the results from applying separately a
horizontal and a vertical approximation. Unwanted
artefacts in the form of skidmarks are present in both
images. Only when a point is labelled as foreground
in both images its overall label will be returned as
“foreground”. It may occur that a single vertical or
horizontal scan produces good enough results, for
instance if the illumination varies from top to bottom
a single horizontal scan could be sufficient. Although
illumination variation in microscopy images is not
usually from top to bottom we have found no loss
of quality by combining two separate scans, even in
these cases.
IV. The thresholds T
i
and T
j
are determined automati-
cally from the respective parabolas z
(3)
i
(x) and z
(3)
j
(x).
The parabola givesthe “middle” background intensity
in the stripe. However, fluctuations about the curve
may also belong in the background. The following
heuristic threshold T
i
is proposed for horizontal stripe
i
T
i
= max
x
z
(3)
i
(x) − mean
x
z
(3)
i
(x) (3)
T
j
is calculated in the same way for the vertical
stripes. Using the standard deviation of the points or
the maximum residual are additional possibilities for
constructing the thresholds.
4 EXPERIMENTS
The background removal method was applied to
seven microscopy images containing microfossils
similar to Figure 1. This technique takes less than 0.8
s for an image of 758 by 568 pixels when run using
Matlab on a PC with a Pentium-4 3.2-GHz processor
and 2GB of RAM. The following alternative segmen-
tation methods were also tried
1. Thresholding the image with a manually adjusted
constant threshold. Only visual feedback was
used to tune the threshold.
2. Fitting a mixture of two Gaussians on the grey
level histogram and finding the intensity corre-
sponding to the minimum-error classification be-
tween class “background” and “other”. This in-
tensity was used as a threshold across the whole
image. Three Gaussians were also attempted be-
cause the images of interest contain darker and
lighter objects (two foreground classes) and the
background, as seen in Figure 1. Figure 4 illus-
trates this technique. The three fitted Gaussians
are overlaid on the grey level histogram of the im-
age and the threshold (138) is marked with a large
dot. (The thresholds found when two Gaussians
were fitted was 137.)
3. Subtracting the morphological closing of the im-
age from the original and performing a manual
threshold on the result (Gonzalez et al., 2004).
The closing of a greyscale image will suppress
dark regions, masking over the foreground pixels
with intensities of local background pixels. By
subtracting this from the orignal greyscale image
we hope to produce an image of even illumina-
tion, thus allowing a global threshold to be ap-
BACKGROUND SEGMENTATION IN MICROSCOPY IMAGES
141
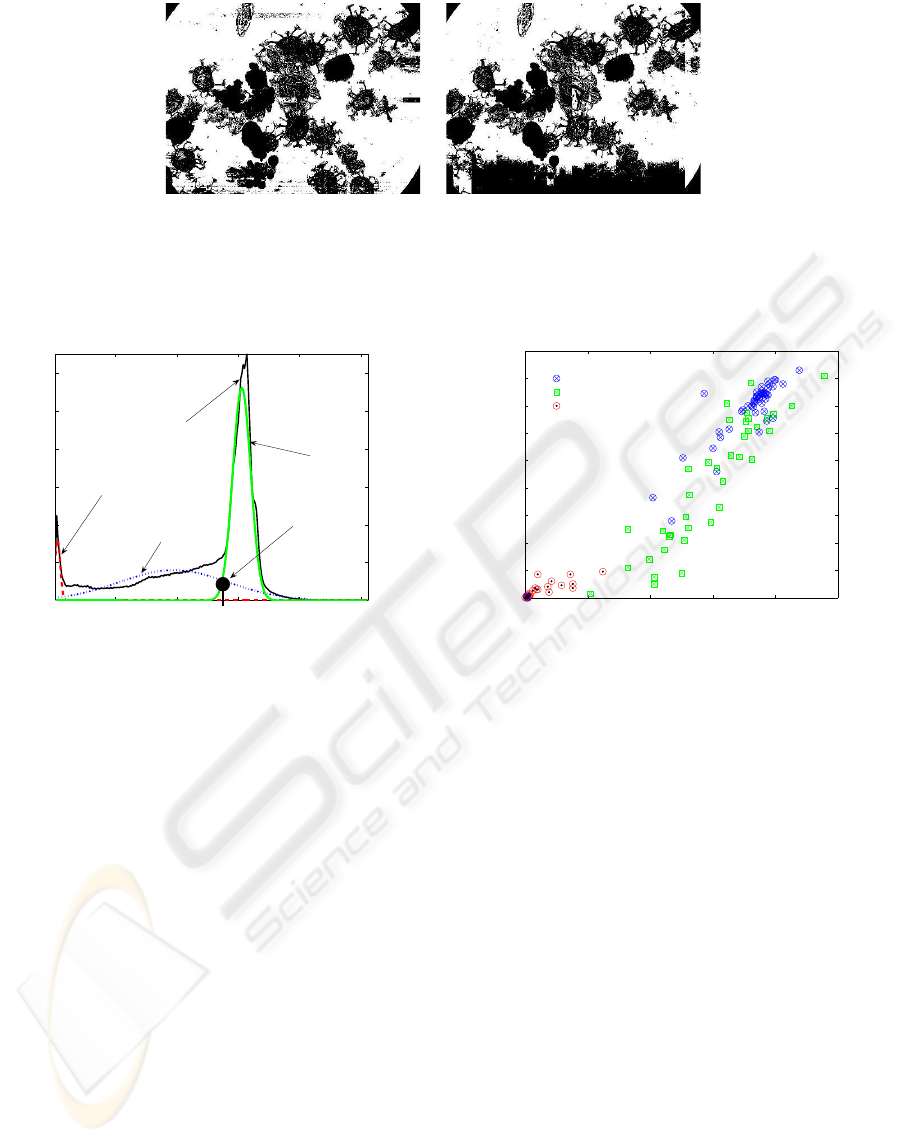
Horizontal scan Vertical scan
Figure 3: Results from applying separately a horizontal and a vertical approximation.
50 100 150 200 250
0
0.005
0.01
0.015
0.02
0.025
0.03
3 Gaussians
original histogram
background
light objects
dark objects
THRESHOLD
Figure 4: The grey level histogram of the image in Figure 1
and the fitted mixture of three Gaussians. The threshold is
marked with a large dot.
plied. The exact operation of this procedure is de-
cided by a structuring element. The size of this
structuring element will determine which dark re-
gions are masked.
4. Clustering in the original RGB space. Figure 5
shows an example of the results of applying k-
means clustering to a random sample of 150 pixels
from the image in Figure 1. Three clusters were
identified, corresponding to background, light and
dark objects, and their projection onto the axes
“red” and “green” are displayed. The covariance
matrices of the clusters were estimated and the
pixels in the original image were then labelled
into foreground and background using the Maha-
lanobis distances to the cluster centres. No im-
provement was found when using a larger sample
of pixels.
5. Fitting a quadratic function. As in the proposed
method, three functions were fitted in the same it-
erative way in order to eliminate the effect of fore-
ground pixels on the approximation.
0 50 100 150 200 250
0
20
40
60
80
100
120
140
160
180
Background
Light objects
Dark objects
Red
Green
RGB Clusters
Figure 5: Three clusters of pixels in the RGB space, pro-
jected onto the R-G axes.
6. Fitting a B-spline surface. Lindblad and Bengts-
son (Lindblad and Bengtsson, 2001) propose to fit
a B-spline surface using a least squares estimate
to correct the light intensity across the image. A
global threshold is then applied to segment back-
ground from foreground pixels. In this example
we calculated the threshold as in method 3 (fitting
three Gaussians).
The accuracy of the results was evaluated visually
across a collection of images. Figure 7 gives a typi-
cal example of the segmentation results through meth-
ods 1 to 6, the proposed method is show in figure 8.
Out of the six alternative methods, method 6 showed
the best results. Methods 3 and 5 showed some miss-
ing or partly captured semi-transparent objects corre-
sponding to organic material. These objects are high-
lighted by ellipses and circles in Figure 7. The pro-
posed technique and method 6 extracted these objects
much more adequately.
Given underneath each subplot is the average
computational time from 3 runs of the chosen method
on the same image. The small changes in process-
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
142

Figure 8: (6) PROPOSED: Parabola fit (0.7787s).
ing time for each run was attributed to background
tasks in Windows XP operating system. (The standard
deviations of the processing times were negligible.)
The computational times indicate that the proposed
method offers a good trade-off between accuracy and
speed compared to the alternatives examined in this
study.
The accuracy of method 6 closely matches that of
the proposed method, however we have found that in
certain circumstances the proposed technique is bet-
ter than method 6. We generated 10 non-uniform
backgrounds of size 200 by 200 pixels. For each
background a dark ring was placed in the centre as
a foreground object. The proposed technique and
the B-spline method were both used to segment the
ring from the image. The accuracy was estimated by
calculating the number of pixels misclassified by the
methods.
Ten rings of constant thickness (30 pixels) with
increasing inner radius were created and placed one
at a time in the centre of the background. The inner
radii of the circles, expressed as a percentage of the
image width, were 5%, 10%, ..., 50%. For images
with inner radius less than 5% to 40%, the proposed
method was better than the B-spline method while at
radii 45% and 50% the B-spline method was better.
Figure 6 demonstrates why the proposed method
works better than the B-spline method. Subplot (a)
shows the generated image with a dark ring. Subplot
(b) shows only the generated background. Subplot (c)
shows the estimated background using B-spline. The
proposed method can also estimate the background
of the generated image; this is shown in subplot (d).
Notice that the foreground has pulled the background
estimate of method 6 towards lower intensity values
however the proposed method ignores these low in-
tensity values creating an adequate background esti-
mate.
5 CONCLUSIONS
A segmentation method is proposed which models
uneven background in microscopy images by a set of
horizontal and vertical parabolas. The method out-
performs five standard segmentation techniques on a
collection of test images at a competitive computa-
tional speed. This approach is an automated one as
apposed to morphological closing that requires man-
ually selecting a structuring element.
The number of parameters that are tuned for the
proposed method far exceeds those of the standard
methods and this is why a better segmentation is
found. Manual thresholding requires only 1 param-
eter. Fitting three gaussians each with a centre and
standard deviation requires 6 parameters. Fitting a
quadratic function entails tuning 6 parameters for the
coefficients of the function. Clustering in RGB space
uses 27 parameters, each of the three clusters has a
centre in three dimensions and an associated covari-
ance matrix. The covariance matrix contains 9 values
but due to the symmetry only 6 of these are indepen-
dent. The B-spline method uses a mesh of size 5x5 as
the control points for the surface, hence 25 parameters
are used. The proposed method uses 3 coefficients of
a parabola fitted to each mean row and column. In
our example we used 15 parabolas for the horizontal
fit and 19 for the vertical fit, which results in 102 pa-
rameters.
The segmentation offered by the B-spline method
is in most cases as accurate as the one obtained by
the proposed method. However, the proposed method
takes a fraction of the time the B-spline method needs.
ACKNOWLEDGEMENTS
The EPSRC CASE grant Number CASE/CNA/05/18
is acknowledged with gratitude.
REFERENCES
Asada, N., Amano, A., and Baba, M. (1996). Photometric
calibration of zoom lens systems. IEEE International
Conference on Patter Recognition, pages 186–190.
Cinque, L., Foresti, G., and Lombardi, L. (2004). A cluster-
ing fuzzy approach for image segmentation. Pattern
Recognition, 37(9):1797–1807.
Gonzalez, R. C., Woods, R. E., and Eddins, S. L. (2004).
Digital Image Processing Using Matlab. Pearson Ed-
ucation, Inc.
Leong, F., Brady, M., and McGee, J. (2003). Correction of
uneven illumination (vignetting) in digital microscopy
BACKGROUND SEGMENTATION IN MICROSCOPY IMAGES
143

images. Journal of Clinical Pathology, 56(8):619–
621.
Lindblad, J. and Bengtsson, E. (2001). A comparison of
methods for estimation of intensity nonuniformities in
2d and 3d microscope images of fluorescence stained
cells. Proceedings of the 12th Scandinavian Confer-
ence on Image Analysis (SCIA), pages 264–271.
Montage (2002). Baseline background correction.
http:
//montage.ipac.caltech.edu/baseline.html
.
Otsu, N. (1979). A threshold selection method from gray
level histogram. IEEE Trans. Systems, Man and Cy-
bernetics, 9:62–66.
Sankur, B. and Sezigin, M. (2004). Survey over image
thresholding techniques and quantitative performance
evaluation. Journal of Electronic Imaging, 13(1):146–
165.
Yu, W., Chung, Y., and Soh, J. (2004). Vignetting distor-
tion correction method for high quality digital imag-
ing. 17th International Conference on Pattern Recog-
nition, 3:666–669.
Zawada, D. G. (2003). Image processing of underwater
multispectral imagery. IEEE Journal of Oceanic En-
gineering, 28(4):583–594.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
144
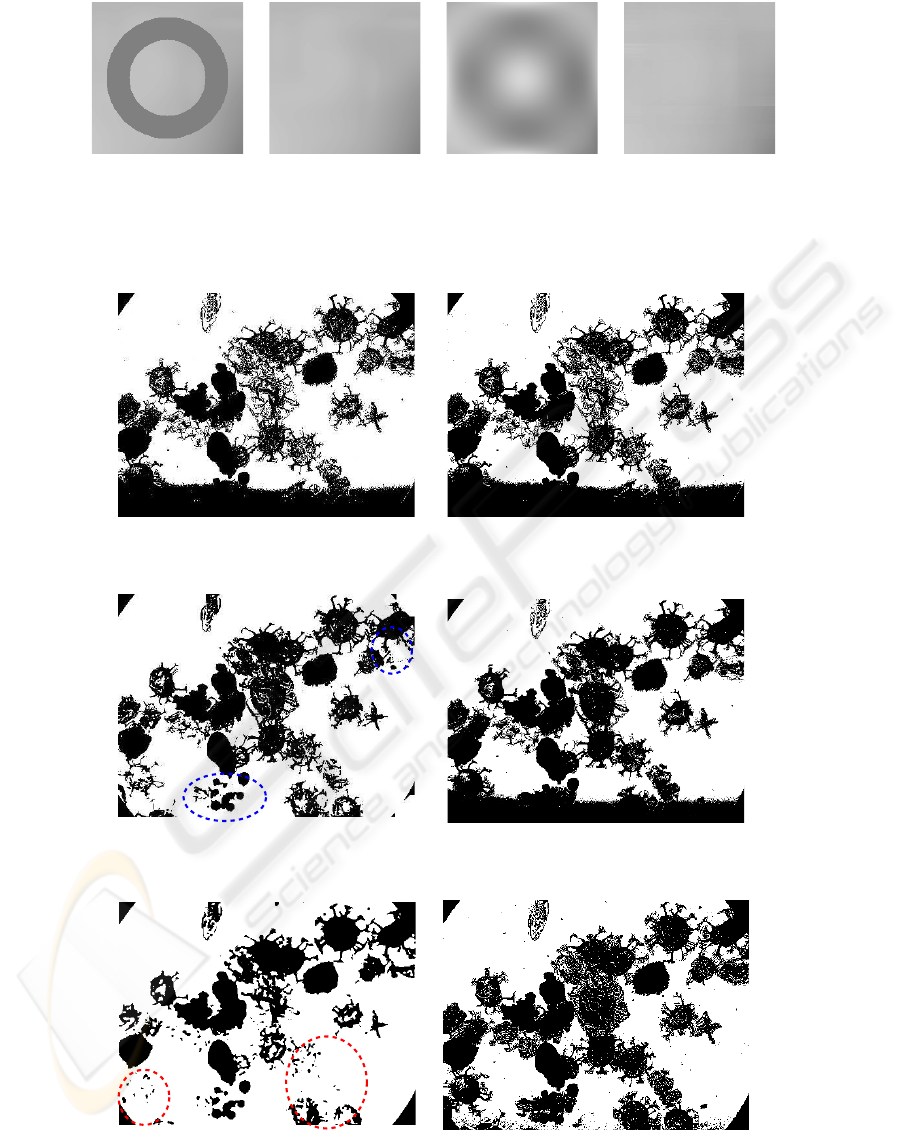
a b c d
Figure 6: (a) Generated image. (b) The true background. (c) The background estimated by the B-spline method. (d) The
background estimated by the proposed method.
(1) Manual thresholding (thr = 135) (2) 3 Gaussians fitted (thr = 138)
(2.6474 s)
(3) Morphological closing (4) Clustering in RGB (3 clusters)
(1.4267 s) (0.8706 s)
(5) Joint quadratic surface (6) B-spline method
(0.2938s) (32.2186 s)
Figure 7: Experimental results: Background removal with the proposed method and the 5 alternative methods.
BACKGROUND SEGMENTATION IN MICROSCOPY IMAGES
145
