
GaDeVi
Game Development Integrating Tracking and Visualization Devices into Virtools
Ricardo Aguiar
1
, João Madeiras Pereira
2
1
IST/UTL, Lisbon, Portugal
2
IST/UTL INESC-ID, Lisbon, Portugal
José Braz
EST/IPS, Setúbal, Portugal
Keywords: Virtual Reality, Immersive Devices, Game Engine, Computer Game, Interactivity, Immersion.
Abstract: Computer and console games are increasingly using non-computer conventional input/output devices. This
work’s main goal was to create an interactive 3D application with Virtools, a development tool that appeals
to the player dexterity and astuteness through the use of several immersive, non-computer conventional
devices like magnetic trackers, data gloves and VR glasses. The present paper describes the integration of
interaction and visualization devices into Virtools as well as the development of two games using the VR
environment. To finalize the assessment of the performance measurements and user tests is given.
1 INTRODUCTION
Nowadays, computer and console games are an
increasingly profitable market (ELSPA, 2003). In
fact, one of the main driving factors for hardware
and technological evolution in IT occur because of
the increasing need of greater capacity for
processing data to simulate high complexity physical
effects and/or offer a realistic visual quality in a
game. Videogame programming is also a very
interesting area of development. Trying to give the
gamer a complete immersive experience becomes a
challenge (Goebel et al, 2001). However most of
today’s games are limited to standard input/output
devices, like a mouse and a keyboard on a PC or a
game pad on a game console. This last statement
was true in 2004 (Hinckley et al, 2004) and still true
today, even if it should be mentioned that the Wii
platform is the exception in the console market.
Moreover the game 3D content is almost always
displayed into a 2D screen such as CRT or LCD.
The goal for this work is to create games with
professional developing tools that offer new ways of
interaction with the player through the use of
immersive devices. The visualization will not be
made by a normal 2D screen but through a set of VR
Glasses in order to give a more realistic awareness
of all three dimensions.
Virtools 4.0 was the main platform to develop
the games along with Visual Studio.Net (Microsoft)
which was used to create new features/plug-ins. The
following immersive devices where programmed
into the games: Magnetic tracker Fastrak
(Polhemus), Data Gloves Ultra (5DT) and Z800 3D
Visors (eMagin). Blender and 3D Studio Max
(Autodesk) were used as modelling and skinning
tools.
2 TECHNOLOGY DESCRIPTION
This section introduces all three devices listed above
and provides a brief description of Virtools.
2.1 Polhemus Fastrak
A tracker’s purpose is to provide real time
information of the location and movement of a
receiver module relatively to an emitter module.
Relative spatial coordinates (x, y, z) and three Euler
313
Aguiar R., Madeiras Pereira J. and Braz J. (2009).
GaDeVi - Game Development Integrating Tracking and Visualization Devices into Virtools .
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications, pages 313-321
DOI: 10.5220/0001755003130321
Copyright
c
SciTePress

angles (azimuth, elevation, roll), thus six degrees of
freedom, are given to the user. A tracker device has
three main components (Polhemus, 2005), an
interface module, also called filter, an emitter
module and finally a receiver module.
(a)
(b)
Figure 1: 5DT Data Gloves. (a) 5 Sensor Model, (b) 14
Sensor Model.
Figure 2: Behavioural Building Block Layout.
2.2 5DT Data Gloves
Data gloves capture hands motion. Several sensors
are placed into specific positions of the glove in
order to capture finger motion, process this data and
supply it to the computer. The models which are
used in this work are Left Handed 5 5DT Data Glove
Ultra and Right Handed 14 5DT Data Glove 14
Ultra (5DT, 2004). These models main differences
are in the number of sensors available at the glove.
2.3 eMagin Z800 3D Visor
A pair of VR Glasses is used instead of a 2d screen
enhancing depth perception which is achieved using
stereoscopy.
Stereoscopy is defined as the creation of a three-
dimensional image by presenting two slightly
different images to each of the human eye. Several
algorithms exist that perform stereoscopy. The most
popular techniques are anaglyph, passive stereo and
active stereo. With anaglyph, an image is
constructed with two overlapped layers, each one
filtered with a different colour. The viewer must
wear a special set of glasses in which each lens has a
different colour.
Passive stereo principle uses light polarization to
transmit a rendered stereo pair. The image is
recombined into the glasses lens through filters.
Active stereo, implemented in 3D Visors, transmits
two different images, with the Graphics Card
Vertical Sync controlling its frequency. Each one of
those images is sent to micro displays located in
left/right eye.
3D Visor also provides tracking information
using accelerometers and an internal gyroscope,
making possible to know the headset orientation and
type of movement.
2.4 Dassault Systèmes Virtools
Virtools, a game engine, was the main platform used
in this game development. It has the advantage of
creating interactive 3D content for computers and
consoles in a fast and intuitive way using Product
Context Scenario “PCS” (Mc Carthy et al, 2006), a
Virtools proprietary programming paradigm. PCS
allows a programmer to create applications using
only drag & drop operations of special entities called
behavioral Building Blocks (BB). A BB has the
aspect shown in Figure 2.
It has five main components:
• Behavioural Inputs (bIn)
• Behavioural Outputs (bOut)
• Parameter Inputs (pIn)
• Parameter Outputs (pOut)
• Properties marks.
The bIn is where the BB receives an activating
signal to start its internal processing; bOut generates
an activation signal when the BB has finished which
is then propagated to other BB. Through pIn and
pOut, data is transmitted between BB, receiving
external data in pIn and transmitting data through
pOut. The “Properties mark” indicates if:
• BB may send/receive messages through
scripts
• Parameters processing may be changed
• New bIn, bOut, pIn, pOut may be inserted
into the BB.
The Virtools layout has three main components,
3D Layout, Building Blocks & Data Resources, and
Manager & Schematic Window, as shown on Figure
3.
In 3D Layout, common abstract objects in a
typical game engine like cameras or lights, may be
created and placed in a game. 2D and 3D content of
a Level may be manipulated in directly at the 3D
Layout, using transformation operations. It is also
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
314

possible to change camera parameters like field of
view, panning, etc.
Inside Building Blocks & Data Resources, all
available behavioural Building Blocks are listed and
are ready to use, as well as a set of native Virtools
resources like images, sounds and so on as shown on
Figure 4.
Figure 3: Virtools Main Layout.
Finally in Level Manager & Schematic Window,
all the Level objects are listed in the Level Manager
section, allowing the programmer to access their
setup. It is also possible to create new scripts and
logical entities like Arrays, Groups, etc. In the
Schematic Window scripts are programmed by
filling them with BBs, Parameter Operations and
Variables as shown in Figure 5.
3 DEVICES INTEGRATION
Virtools standard version does not support the set of
immersive devices listed above, so it is necessary to
integrate them. This process is made using the
Virtools SDK and the devices specific Application
Programming Interfaces. New BB and Managers are
created with SDK using C++. To develop a new BB
it is necessary to establish the number of bIn/ bOut,
the number and type of pIn/pOut, types of properties
marks and define an execution function which has
the desired BB internal processing and bOut
activation. A Manager, manages data resources,
external communications, etc. The order through
which the managing process is performed must be
defined in a Manager. It may be done after or before
a frame is processed.
3.1 Polhemus Fastrak Integration
Polhemus Fastrak API programming interface,
FTAPI, allows the connection and communication
between the PC and tracker. After an established
connection, the programmer may request data such
as relative position in rectangular coordinates [x, y,
z] and orientation in Euler angles [Azimuth,
Elevation, Roll] of one of four possibly connected
receivers to a unique transmitter.
A single behavioural Building Block is
developed with FTAPI, which is responsible by
managing the trackers communication with the PC
and supply its data to the programmer. However,
this approach decreases drastically the applications
overall performance with frame rates falling down
from 60 to 5-10 fps. To overcome this lack of
performance, a Manager is created and made
responsible for the communication with the tracker
and supplying the requested data to a newly
developed BB, named TrackerBB The programmer
may change from which receiver he wants to obtain
tracking data inserting a valid receiver id into
StationId pIn as shown in Figure 6.
The Manager, before each frame is processed,
requests new data from the specified receiver and
make it available to TrackerBB to use it in a
composition. The tracking data from the BB may be
used through its pOuts which specify, from left to
right:
Vector with relative rectangular receiver
coordinates [x y, z]
• Receiver’s relative Azimuth angle
orientation
• Receiver’s relative Elevation angle
orientation
• Receiver’s relative Roll angle orientation
• Connection Status
• Tracker Debug Information
• Tracker internal latency time, first 32 bits
• Tracker internal latency time, last 32 bits
Using the BB - Manager Scheme increases the
frame rate up to 30 fps.
3.2 5DT Integration
A similar plug-in is developed for the data gloves. A
Manager is created with Virtools SDK and FGlove
API. As in the tracker, it manages the
communication and data flow from the gloves and a
newly developed BB named GloveBlock.
GloveBlock has two pIn: Mode and gloveId.
Mode indicates if the sensors outputs are raw or
auto-calibrated values. If raw data is selected the
values are given in a range of 0-4095 (12 bit
resolution) in which 0 is no sensor flexure and 4095
is total sensor flexure. In case calibrated values
GaDeVi -
Game Development Integrating Tracking and Visualization Devices into Virtools
315

mode is selected the values range is 0-1, with 0
indicating no sensor flexure and 1 indicating total
sensor flexure.
Figure 4: Resources Drag & Drop.
Figure 5: BB Drag & Drop.
Figure 6: Tracker behavioural Building Block.
Figure 7: Glove behavioural Building Block.
Figure 8: 3D Visor behavioural Building Block.
The data that can be retrieved by pOuts is, from
left to right:
• Sensor 0 flexure or Sensor A flexure (fig 1)
• Sensor 1 flexure or Sensor A flexure (fig 1)
• Sensor 2 flexure (fig 1)
• Sensor 3 flexure or Sensor B flexure (fig 1)
• Sensor 4 flexure or Sensor B flexure (fig 1)
• Sensor 5 flexure (fig 1)
• Sensor 6 flexure or Sensor C flexure (fig 1)e
• Sensor 7 flexure or Sensor C flexure (fig 1)
• Sensor 8 flexure (fig 1)
• Sensor 9 flexure or Sensor D flexure (fig 1)
• Sensor 10 flexure or Sensor D flexure (fig 1)
• Sensor 11 flexure (fig 1)
• Sensor 12 flexure or Sensor E flexure (fig 1)
• Sensor 13 flexure or Sensor E flexure (fig 1)
• Hand gesture recognition
• Handedness of the glove
• Glove Model Description
• Number of gloves connected
• Type of gloves connected
• Internal latency time, first 32bits
• Internal latency time, last 32bits
3.3 eMagin Z800 Integration
3D Visors has two components to be integrated with
Virtools. The first one is headset orientation given
from its internal gyroscopes and the second one is
stereoscopic visualization to enhance depth
perception.
Headset Orientation - Like in the gloves and
magnetic tracker, a Manager and a behavioural
Building Block, eMaginBB, are created using
Virtools SDK and eMagin SDK. The Manager
handles communication with 3D Visors and
retrieves its orientation data to make it available to
eMaginBB.
There is only one pIn: PollTime. It allows the
programmer to change the time interval in which a
callback function is internally called in the manager
to collect new orientation data from the 3D Visor
device (Figure 8)
The pOuts, from left to right, have the following
data:
• Roll angle
• Pitch angle
• Yaw angle
• Internal latency time, first 32bits
• Internal latency time, last 32bits
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
316

Visualization - Virtools already have a plug-in,
VR-Pack (5DT, 2004), that deals with stereoscopy.
However, a set of external files must be configured
in order to activate stereoscopy into an application.
Also the game camera must be configured in a way
that its view frustum becomes asymmetrical and
provide a correct perception of stereoscopy.
Convergence Plane: Plane where objects left
and right images converge
Parallax: Difference in centimetres between
scenes projected in left and right images
IPD: Interpuppilar distance
Using asymmetrical view frustums cameras
makes the created depth perception effect the most
immersive possible. These special cameras are
known as Projection Referential Cameras and,
instead of using a position, orientation, aspect ratio,
field of view, near and far clips, use a position, 3D
Sprite (eMagin, 2005) and near and far clips. A 3D
Sprite is a basically a 2D image/quad inside Virtools
with a certain position and orientation.
If conventional cameras were used into with
stereoscopy the result would be as shown in Figure
12.
Notice that the convergence plane is located at
the infinite and the parallax is always negative,
meaning that all the objects are perceived before the
convergence plane, which is obviously wrong. A
well balanced stereoscopic image must contain
objects with a negative and positive parallax, so that
they are perceived after and before the convergence
plane. Also some of the objects may have a zero
parallax which indicates that they intercept the
convergence plane.
4 GAME DEVELOPMENT
A brief description will be made about the games
that were developed during this work. A set of core
scripts were created to acquire the data from all the
immersive devices and to configure active
stereoscopy. Both the data from the tracker, glasses
gyroscope and the gloves passes through a simple
software low-pass filter, which minimizes the data’s
high-frequency noise. It calculates an average value
from a pre-defined number of samples taken from
the BB’s TrackerBB, eMaginBB and GloveBlock.
Position and orientation data is retrieved from
the tracker manager into trackerBB (Figure 13). This
data is passed through the filter and a new position
and orientation are calculated and applied to the
desired 3D object to control.
For the data gloves, flexure data passes through a
low pass-filter similar to the one described above, a
flexure variation is then calculated for each sensor
and applied to the virtual hands (Figure 14). If
activated, the player camera position will be
translated accordingly to the value from the gesture
pOut.
The pseudo-code for 3D Visor (Figure 15) is
similar to the magnetic tracker, but it only calculates
an orientation with yaw and pitch angles since roll
angle rotation is not usually used in a camera
orientation.
For the 3D Visor, besides the external
configuration files, the BBs VR Get Config Token,
VR Stereo Settings and VR Set Projection Ref are
used to define the stereoscopy with a custom created
Projection Camera (Nahon et al, 2006).
Two games were created using these core
scripts, PongVR, a table tennis simulator and
PianoVR, a virtual piano.
Figure 9: Correct Stereoscopy.
Figure 10: Standard Camera.
GaDeVi -
Game Development Integrating Tracking and Visualization Devices into Virtools
317
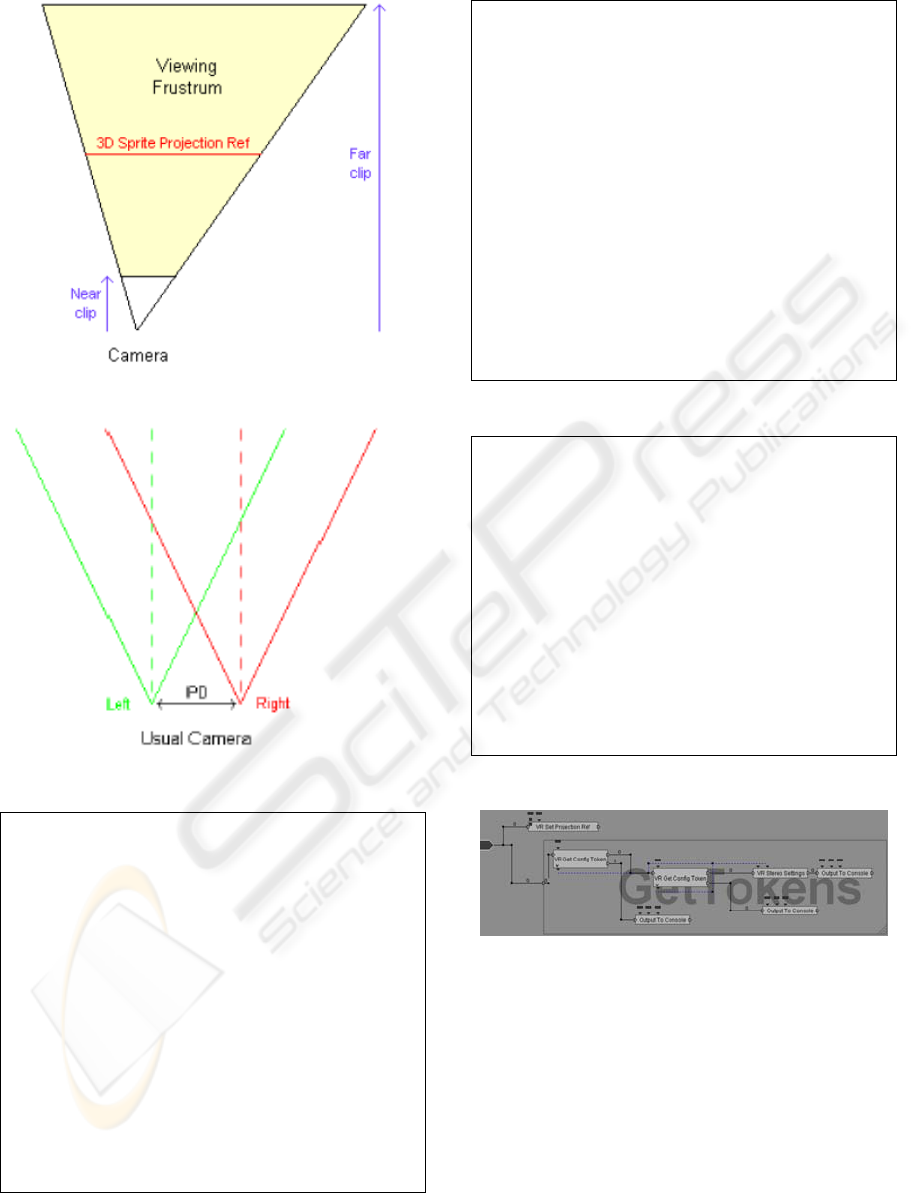
Figure 11: Projection Referential Camera.
Figure 12: Stereoscopy with standard cameras.
1. Get Position and orientation data
from magnetic tracker
2. Calculate TrackerBB execution time
3. Attenuate high-frequency noise
with low-pass filter
4. Data insertion on a vector with a
pre-defined size
5. Eliminate oldest value if vector
full
6. Calculate an arithmetic average
value from vector data
7. Calculate new orientation
8. Apply new orientation to
hand/racket using local
coordinate system
9. Calculate new position
10. Apply new position to hand/racket
using world coordinate system
Figure 13: Magnetic tracker pseudo code.
1. Obtain gloves flexure data/gloves
gesture
2. Calculate GloveBlock execution
time
3. Attenuate high-frequency noise
with low-pass filter
4. Data insertion on a vector with a
pre-defined size
5. Eliminate oldest value if vector
full
6. Calculate an arithmetic average
value from vector data
7. Calculate flexure variation from
each sensor
8. Apply variations to fingers using
local coordinate system
9. (If active) Apply camera movement
mapped by glove gesture
Figure 14: Glove data pseudo code.
1. Get orientation data from 3D Visor
gyroscope
2. Calculate eMaginBB execution time
3. Attenuate high-frequency noise
with low-pass filter
4. Data insertion on a vector with a
pre-defined size
5. Eliminate oldest value if vector
full
6. Calculate an arithmetic average
value from vector data
7. Calculate new orientation
8. Apply new orientation to active
game camera using local
coordinate system
Figure 15: eMagin gyroscope pseudo code.
Figure 16: Stereoscopy configuration script.
4.1 PongVR
This game’s main goal is to simulate a real table
tennis game. A player uses tracking information to
position and orient a racket in the 3D virtual world:
a 3D Visor is used to visualize the game and orient
the player’s camera using its internal gyroscope. A
5DT glove is put on the player’s left hand with the
purpose of moving the camera with a set of
predefined gestures. The game’s physics simulation
is achieved through Virtools Physics pack. A hit
combo system is also created to enhance the player’s
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
318

gaming experience. Video demonstrations of this
game are publicly available in the youtube
1
..
PongVR offers the possibility to configure all
sensors sensibility from within the game, through
the Options Menu accessible in the Start Menu or
pressing ‘P’ during the game. Three difficulty modes
Easy, Medium and Hard are programmed, which
defines the opponent AI.
4.2 PianoVR
In this game the player controls a pair of virtual
hands in order to play a piano. Two tracker receivers
are used, one to each hand, so the player can move
and orient both virtual hands.
Besides the tracker data, a pair of 5DT gloves
are put on and their sensors information are used to
transform a bone system within each of the virtual
hands. Every one of these bones has a weight
associated to determine how the hands mesh will be
modified. The process of creating a bone system,
associating this info into a mesh and transform the
bones is called skinning (Virtools, 2006).
Virtools Physics Pack wasn’t used in PianoVR.
The interaction between hands and piano were
developed specifically to this game. Video demos of
this game may be seen in youtube
2
.
The sensibility of all the glove sensors and
tracker may be changed from inside the game using
the Options Menu available from the Start Menu or
pressing ´P ´when in game.
Like PongVR, this game makes use of the 3D
Visor to view the game with active stereoscopy and
to orient the player’s cam.
In order to increase gaming experience, a series
of pre-determined music’s are placed into the game
and the player’s objective is to successfully play
each one of these songs within a limited time. Three
difficulty modes are given to the player, Easy,
Medium and Hard. They define how much time the
player has to perform each one of the predefined
music’s.
5 PERFORMANCE
MEASUREMENTS
A series of tools were created to know how well the
immersive devices behave inside Virtools. A new
1
http://youtube.com/watch?v=wEDRyzol-J8
http://youtube.com/watch?v=futpUwc2A0A
2
http://youtube.com/watch?v=PSGD9bRWvWw
http://youtube.com/watch?v=EFJttobtFrU
Manager, Time Manager, along with a new
behavioural Building Block, named
Get_Precise_Time, were developed to access the
internal CPU clock and used to perform time
measurements with a resolution of µ seconds.
The time variable supplied by the BB is the time
elapsed since the activation of the Time Manager
from within Virtools, so the execution time of
GloveBlock or TrackerBB is determined by using a
Get_Precise_Time BB before and after those BB.
Both Glove Manager and Tracker Manager also
calculate their internal latency time. Combining this
information with the one given by
Get_Precise_Time BB, the overall time since the
data is requested to the devices until it is used inside
Virtools can be accurately found.
Figure 17: PongVR Main Menu.
Figure 18: PongVR Combo System.
Figure 19: PianoVR in game footage.
GaDeVi -
Game Development Integrating Tracking and Visualization Devices into Virtools
319

Figure 20: Finger-piano key collision.
Both games supply latency time information to
the player by pressing ‘1’ key. A population of 100
samples is captured to calculate average values. The
table bellow shows time results obtained executing a
composition with just the devices BB, and with both
games PianoVR and PongVR. The measurements
are made in a laptop with a 1.8GHz Core Duo
processor, 1024 of RAM and an ATI X1600
Mobility Radeon Graphics Card.
PianoVR has a total of 9786 behaviours, 102 3D
objects with a total of 7233 faces and makes use of
5.61 MB of Video Ram and PongVR has a total of
625 behaviours, with 48 3D objects, 9063 faces and
makes use of 4.2 MB of Video Ram. This makes
PianoVR the worst case scenario and it will be used
as a reference.
Magnetic Tracker - The tracker has latency time
value of approximately 34ms which is bigger than
expected since given by (Polhemus, 2005), that sums
a total of 20.67 ms. The time differences is caused
by the filters internal latency time to calculate new
values of position and orientation to its receptors and
the fact of the application running inside Virtools
environment also slightly increases the latency time.
Data Gloves - The gloves overall time sums to a
total of 123µs. Information regarding the sampling
frequency (5ms) is provided in (5DT, 2006) for the 5
sensor model but no information is available
regarding the internal latency time. With such a low
value of overall time means that only USB
communication latency is taken into account and the
glove device provides information even without
having new flexure data available.
Glasses Gyroscope - For the 3D Visor model, a
value of 4ms device latency time and 125Hz
sampling rate is provided in which gives a total of
12ms total latency time. The discrepancy between
the official value and the one obtained through the
eMagin Manager is due to the polling time of 30 ms
by eMaginBB pIn, which is also taken into account.
Also the fact of the application is running inside
Virtools environment slightly increases the latency
time.
6 USER TESTS
Some user tests were made in order to evaluate how
well the PongVR and PianoVR interact with a player
and if they have a good immersive experience.
Each one of the users first learn how each device
operates and then plays both games. In the end a poll
is made in which the player have to give a score
from 1 to 10 to some questions.
The global evaluation for both games is quite
good. All users have felt a good immersive
experience while playing both games, and had a
positive response in how the devices features were
integrated into the games. They had also a
successfully augmented depth perception caused by
active stereoscopy from 3D Visor. However they felt
that both games, especially PongVR, had a high
learning curve mostly caused by the magnetic
tracker behaviour.
New features were added into both games after
the user tests namely:
Possibility to change the eMagin Z800 3D Visor
polling time to increase/decrease its gyroscope
sensibility.
Real time calibration of stereoscopic camera
field of view and distance to the convergence plane
so that a user may adjust these values with the
purpose of enhancing depth perception
Table 1: Devices Performance.
Empty
Scene
PianoVR PongVR
GloveBlock
(µs)
8 345 56
TrackerBB
(µs)
8 970 45
eMaginBB
(µs)
41 80 200
Glove Manager
(µs)
123 123 123
Tracker Manager
One Receiver
(µs)
22000 - 22000
Tracker Manager
Two Receivers
(µs)
33000 33000 -
eMagin Manager
(µs)
54000 54000 54000
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
320

Table 2: PongVR Poll questions.
PongVR Total
Answer
[1-10]
Tracker sensitivity
8,5
Tracker readyness
8,8
Trackers features Integration
9,0
3D Visors gyroscope sensitivity
6,8
3D Visors gyroscope readyness
6,8
3D Visors features Integration
8
Depth perception
7
Immersive experience
7.5
Gameplay
8,2
Game difficulty
8,3
Game global evaluation
7,8
Table 3: PianoVR Poll questions.
PianoVR Total
Answer
[1-10]
Tracker sensitivity
9,2
Tracker readyness
8, 7
Trackers features Integration
9,2
Gloves sensitivity
8,2
Gloves readyness
8, 3
Gloves features integration
8,5
3D Visors gyroscope sensitivity
6,8
3D Visors features Integration
7
3D Visors features Integration
7,8
Depth perception
6,8
Immersive experience
7,7
Gameplay
8,5
Game difficulty
7,5
Game global evaluation
8,2
7 CONCLUSIONS
The goal of this work was to use professional
developing tools to create games using state of the
art immersive devices. Virtools plugins and internal
scripts were developed in a modular way, so that
they can be reused in other contexts and
applications. The focus of this work applications
were game development, but an industrial
application might have been created instead, e.g. a
virtual car assembly line where the user has a virtual
storage and can grab, translate and rotate parts to
assemble a car prototype.
Game design was seriously taken into account
while developing each one of these games. The
creation of an appealing interface, which gives all
the necessary information to the player without
distracting him from the game objective, was a
constant preoccupation. Both games had a modular
architecture with different threads handling game
logic, physics, etc.
However the devices have several issues that
decrease gameplay. Magnetic tracking device has a
limited range of action and relatively high latency
times. Both the data gloves, 3D Visor and Tracker
are connected via USB cable into the PC so the
player has a confined area of movement restricted by
the several cables.
Nevertheless, both games PianoVR and PongVR
were successfully created allowing the player to
have a very immersive experience while playing not
being limited to traditional input/output devices.
REFERENCES
ELSPA – Entertainment and Leisure Software Publishers
Association, 2003. The Cultural Life of Computer and
Video Games: A Cross Industry Study. ELSPA
Publications, Worcestershire, UK.
Goebel, M., Hirose, M., Rosenblum, L., 2001: Today’s
VR. IEEE Computer Graphics and Applications,
November/December 2001 21(6) 22-24.
Hinckley, K. R.J.K. Jacob, and C. Ware, 2004.
Input/output Devices and Interaction Techniques,” in
The Computer Science Handbook, Second Edition, ed.
by A.B. Tucker, pp. 20.1-20.32, Chapman and
Hall/CRC Press.
Polhemus, 2005. 3Space™ Fastrak® User’s Manual.
Polhemus Inc.
5DT, 2004. 5DT Data Glove Ultra Series User’s Manual,
5DT Corp.
eMagin, 2005. eMagin z800 3DVisor User Guide, eMagin
Corporation.
Mc Carthy, C., Callele, D., Krupa, F., 2006. Virtools User
Guide, Dassault Systemes.
Nahon, D., Philippon, N., Kaci L., Kuntz, S., 2005.
Virtools
TM
Behaviour Libraries - VR Library/VR,
Dassault Systemes.
Virtools, 2006. Virtools
TM
4.0 Online Reference, Dassault
Systemes.
5DT, 2006. 5DT Data Glove Series, 5DT Virtual Reality
for the Real World (http://www.cybermind.nl/Info/
5DTDataGloveSeries.pdf).
GaDeVi -
Game Development Integrating Tracking and Visualization Devices into Virtools
321
