
EXTRACTING PRINTED DESIGNS AND WOVEN PATTERNS
FROM TEXTILE IMAGES
Wei Jia, Stephen J. McKenna and Annette A. Ward
School of Computing, University of Dundee, Dundee, Scotland, U.K.
Keywords:
Textile segmentation, Pixel labelling, Markov random field, Quantitative evaluation.
Abstract:
The extraction of printed designs and woven patterns from textiles is formulated as a pixel labelling problem.
Algorithms based on Markov random field (MRF) optimisation and reestimation are described and evaluated
on images from an historical fabric archive. A method for quantitative evaluation is presented and used to
compare the performance of MRF models optimised using α−expansion and iterated conditional modes, both
with and without parameter reestimation. Results are promising for potential application to content-based
indexing and browsing.
1 INTRODUCTION
Accurate automatic extraction of printed designs and
wovenpatterns from images oftextiles is an important
task in providing a suitable representation on which
to build algorithms for the retrieval and browsing of
digital textile archives. This paper discusses colour
segmentation of digital images in a historical com-
mercial archive owned by Liberty Fabric, the fabric
design division of Liberty, London’s iconic depart-
ment store. The Liberty digital archive consists of
many thousands of images, primarily comprising tex-
tile swatches from the past century. Some designs are
printed on the surface of the fabric and other designs
are formed as part of the weave of the fabric. Al-
though many of the images are from the previous 50
years, there are many that are much older, are only
fragments, or have degraded over time; thus adding
complexity to the problem of extraction.
In general the problem of image segmentation is
ill-defined with more than one reasonable segmenta-
tion solution for a given image. Furthermore, many
textile and art images consist of abstract patterns that
make segmentation more challenging. Figure 1(a)
shows a 6-colour design with sketchy flowers and Fig-
ure 1(b) illustrates one possible manual segmentation
of that design into different design components (i.e.,
flowers and leaves).
Formulation of the problem of segmentation of
printed designs and woven patterns requires consider-
ation of textile production. There are various methods
of textile coloration and production. Contemporary
production of Liberty Fabric prints require making a
screen for each colour used in a design. This can be
done by hand tracing or by computer reduction and
separation. Dye is applied to the fabric by flat screens
for short runs and rotary screens for long runs and
continuous designs. However, not all designs in the
archive are printed. Some designs are woven into the
fabric through the weaving process that may be sim-
ple, in the case of stripes, or more complex; for exam-
ple, jacquard.
Figure 1(c-g) shows a ground truth for the origi-
nal image in Figure 1(a) that was obtained by man-
ually assigning its pixels to one of five classes (i.e.,
colours). However, in a large database, manual label-
ing is not feasible. Thus, the problem to be solved
is to determine the number of classes in a digital tex-
tile image and label each pixel as belonging to one of
these classes. Solutions to this problem can be quanti-
tatively evaluated by comparing computer extractions
with manually-annotated ground-truths such as those
shown in Figure 1(c-g).
Another aspect that may complicate the problem
of segmenting a digital image into colour regions
is the physical surface texture of the fabric (Fig-
ure 2). This is affected by the fibres (e.g., smooth
or crimped), yarns (e.g., soft or hard twist; number
of plies), fabric construction (e.g., type of weave or
knit), and/or textile finishing (e.g., brushing or chem-
ical application). All of these factors may impact the
visual texture of the image. Methods based on clus-
201
Wei J., J. McKenna S. and A. Ward A. (2009).
EXTRACTING PRINTED DESIGNS AND WOVEN PATTERNS FROM TEXTILE IMAGES.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 201-208
DOI: 10.5220/0001800702010208
Copyright
c
SciTePress

(a) (b) (c) Class 1
(d) Class 2 (e) Class 3 (f) Class 4
(g) Class 5 (h)
Figure 1: (a) A textile image (
c
Liberty Fabric). (b) One of
many reasonable (manual) segmentations. (c-g) A manually
obtained class labeling of the pixels (h) A JSEG segmenta-
tion.
tering pixels in a colour space without considering the
spatial coherence of the clusters will fail in such cases.
Further difficulties arise due to the age and condition
of the textiles, especially in historic archives. For
printed textiles, the saturation of a dye varying within
a region (either due to degradation or by design) may
be problematic. Printing may result in screens being
misaligned and in dyes blending together near their
boundaries to form new colours. However, these ef-
fects are sometimes deliberately introduced to create
additional colour variation or to help ensure that the
fabric is entirely covered with dye leaving no undyed
areas.
(a) (b)
Figure 2: (a) The underlying fabric can be strongly textured.
(b) Colour dyes can blend together and have spatially-
varying density (Images
c
Liberty Fabric).
Markov random field (MRF) models have been
used previously for image segmentation, though usu-
ally for binary foreground-background segmentation
tasks. In this paper, an MRF model is formulated
and applied to the textile segmentation task described
above. Given ground-truth estimates of colour sep-
aration, this application provides a useful test case
for comparing algorithms. A method for quantita-
tive evaluation of multi-class pixel labelling methods
is proposed that handles segmentations with different
numbers of labels. It is used to compare segmentation
results obtained by Gaussian mixture colour cluster-
ing, MRF inference using Iterated Conditional Modes
(ICM), and MRF inference using α−expansion. The
MRF models consider both the class colour distribu-
tions and the spatial coherence of the pixel labels. The
colour distributions are initialised based on a labelling
estimated using a Gaussian mixture in colour space.
The number of colour classes is estimated using the
Bayes Information Criterion (BIC).
Some related work is described in Section 2. The
MRF model along with the algorithms selected to
perform learning and inference are described in Sec-
tion 3. Section 4 describes the evaluation method and
Section 5 reports comparative results obtained using
this method. Finally, Section 6 draws some conclu-
sions and mentions some plans for future work.
2 RELATED WORK
Clustering of local image features or pixel values is
often performed using K-means clustering or Gaus-
sian mixture model (GMM) parameter estimation
with Expectation-Maximisation (EM) (e.g. (Gupta
and Sortrakul, 1998; Wu et al., 2003; Permuter et al.,
2003)). Such clustering treats the features or pixel
values as independent and so when used for segmen-
tation the results often lack spatial coherence, espe-
cially when the images exhibit strong texture. Images
of fabric have been segmented using colour clustering
after first attenuating noise and texture by applying
median filtering (Valiente et al., 2001). However, the
use of a median filter as a preprosessing step can result
in important details being lost. The JSEG segmenta-
tion algorithm (Deng and Manjunath, 2001) performs
colour clustering at the pixel level and then uses re-
gion growing on the cluster labels to segment colour-
texture regions. An example JSEG result is shown
in Figure 1(h)
1
. Whilst JSEG can find reasonable
colour-texture regions, it has two drawbacks. Firstly,
it decomposes the task into two steps of colour clus-
tering and region finding so that the colour cluster-
ing step takes no account of spatial information. Sec-
ondly, fabric designs have spatially disjoint regions
that share the same colour-texture. We seek a la-
belling that makes this explicit.
1
The JSEG implementation of Deng and Man-
junath was used with default parameters. See
http://vision.ece.ucsb.edu/segmentation/jseg/
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
202

Markov random field (MRF) can provide spatial
constraints in a neighborhood system in the image
domain. They have been used to perform spatially
coherent pixel clustering and promising qualitative
results were reported on two outdoor scenes (Zabih
and Kolmogorov, 2004). Kato and Pong reported
some quantitative segmentation results using an MRF
with pixel colour and local texture features (Kato and
Pong, 2006). However, they assumed that the num-
ber of labels was known. Furthermore, the MRF en-
ergy optimisation methods used by Kato and Pong
no longer represent the state of the art. Compara-
tive studies of MRF optimsation methods on various
computer vision problems have shown methods based
on graph cuts to be effective (Boykov et al., 2001;
Szeliski et al., 2008).
3 MRF SEGMENTATION
Each pixel p is to be assigned a label f
p
which takes a
value from a discrete label set {1, ...K} with f denot-
ing a particular labelling of all the pixels. The purpose
is to obtain the labelling
ˆ
f that is most probable given
the image X ,
ˆ
f = argmax[P( f|X )] = argmax[P(X | f)P( f)] (1)
According to the Hammersley-Clifford theorem
(Li, 1995), the prior probability of a particular la-
belling is:
P( f) ∝ exp(−
∑
C
V
C
( f
p
, f
q
)) (2)
where the sum is over all cliques in a neighborhood
system andV
C
is a clique potential. A clique is defined
as a subset of pixels in the neighborhood system. The
MRFs used in this paper consider adjacent pixel loca-
tions to be neighbours (4-connectivity) and the clique
potentials involve pairs of pixels, so formulation (2)
becomes:
P( f) ∝ exp(−
∑
p
∑
q∈N
p
V( f
p
, f
q
)) (3)
where q is the neighborhood of p. An important dis-
continuity preserving metric function is given by the
Potts model (Potts, 1952):
V( f
p
, f
q
) = λ· (1− δ( f
p
− f
q
)) (4)
If labels p and q are different ( f
p
6= f
q
) , then its value
is λ. Otherwise its value is zero.
Note that the pixel features are assumed indepen-
dent given the labels, so
P(X | f) =
∏
p
P(x
p
| f
p
) (5)
The likelihood of a label, f
p
, given its pixel, x
p
, is
modelled as Gaussian,
P(x
p
| f
p
= k) =
exp[−
1
2
(x
p
− µ
k
)
T
Σ
−1
k
(x
p
− µ
k
)]
p
(2π)
d
|Σ
k
|
(6)
with parameter set θ
k
which consists of the mean, µ
k
,
and the covariance matrix, Σ
k
.
Thus, the problem of segmenting an image is for-
mulated as labelling each pixel with one of K possible
labels and is achieved by minimizing the following
energy function.
E( f) =
∑
p
∑
q∈N
p
λ· (1− δ( f
p
− f
q
)) −
∑
p
ln(P(x
p
| f
p
)
(7)
where the constant λ ≥ 0 is a coefficient that specifies
the penalty for assigning different labels to neighbor-
ing pixels. Eq. (7) has two terms: the first is a smooth-
ing term that rewards spatial coherence and the sec-
ond is a data term.
3.1 Energy Function Minimisation
The energy minimisation problem can be solved by
using the α−expansion algorithm (Szeliski et al.,
2008). The variable α takes values in {1,2,...K} it-
eratively. Within one α−expansion, some of the la-
bels are simultaneously changed to α while all oth-
ers remain unchanged. This gives a new labelling f
which is accepted only if it reduces the energy. In
general there are an exponential number of possible
expansion moves. A graph-based min-cut/max-flow
algorithm (Boykov and Kolmogorov, 2004) has been
used to find the optimal expansion move, namely to
find the lowest energy within one α−expansion. The
α−expansion algorithm is guaranteed to converge,
terminating when there is no energy decrease for all
values of α.
An alternative and older method, iterated condi-
tional modes (ICM) (Besag, 1986), uses a greedy
strategy to find a local minimum of the energy func-
tion. For each pixel in turn, the algorithm chooses the
label which results in the lowest energy. This is re-
peated until convergence. ICM has been reported to
be very sensitive to the initialisation of the labelling.
3.1.1 Initialisation
The number of labels, K, and the initial labelling,
are both estimated using a GMM to model the pixel
values in RGB space. Bayes’ Information Criterion
(BIC) has been found by various authors to give rea-
sonable results when selecting the number of com-
ponents in a Gaussian mixture, e.g. (Roberts et al.,
EXTRACTING PRINTED DESIGNS ANDWOVEN PATTERNS FROM TEXTILE IMAGES
203
1998). Given maximum likelihood parameter esti-
mates
ˆ
θ , the number of the components is selected
as
K
BIC
= argmin
K
{−L(X|
ˆ
θ,K) +
1
2
M(K)lnN} (8)
where L(X|
ˆ
θ) is the log likelihood, N is the number
of samples, and M(K) is the number of free param-
eters in the model which in the case of a 3-D GMM
with full covariance matrices is M(K) = (1/2)Kd
2
+
(3/2)Kd + K − 1, where d=3. Given the initial la-
belling, the parameters of the class-conditional Gaus-
sians (Eq. 6) are estimated from the pixel data classi-
fied as belonging to that class (using MAP classifica-
tion).
3.1.2 Parameter Re-Estimation
A useful strategy is to alternate energy reduction
and parameter estimation in a manner similar to
Expectation-Maximisation. In the “E” step, the Gaus-
sian parameters are fixed and a new labeling is found.
Given the new labelling, the parameters of the Gaus-
sians are re-estimated conditioned on this labelling
(the “M” step). This results in a new energy func-
tion, the value of which the next “E” step should re-
duce. Since parameter estimation is relatively fast, it
seems reasonable in the case of α−expansion to re-
estimate the Gaussian parameters after each new ex-
pansion step (Zabih and Kolmogorov, 2004).
4 EVALUATION METHOD
Ground-truth labelling can be produced for each im-
age by manual annotation. For visualisation, these la-
bels are mapped to contrasting colours. The accuracy
of an automated labelling is then evaluated by com-
paring it to the ground-truth. However, the label val-
ues are interchangeable. Furthermore, the labelling
obtained will not generally have the same number of
label values as the ground-truth. If two segmenta-
tions use N and M labels respectively then there are
R(M,N) =
M!
(M− N)!
(0 < N ≤ M) possible mappings
between the N labels in one segmentation and the M
labels in the other segmentation. Note thatU = M−N
labels will not find a match (U ≥ 0). The measure of
segmentation error which we use is the percentage of
pixels labelled differentlyfrom the ground-truthin the
mapping that minimises this percentage, i.e.,
E = min
Π
100
m
m
∑
p=1
δ( f
(1)
p
− Π( f
(2)
p
)) (9)
where f
(1)
p
and f
(2)
p
are labels assigned to the same
pixel in the two segmentations, and Π denotes a per-
mutation of the labels. Note that labels that do not
find a match will contribute to this error. The percent-
age of pixels with unmatched labels will be denoted
U .
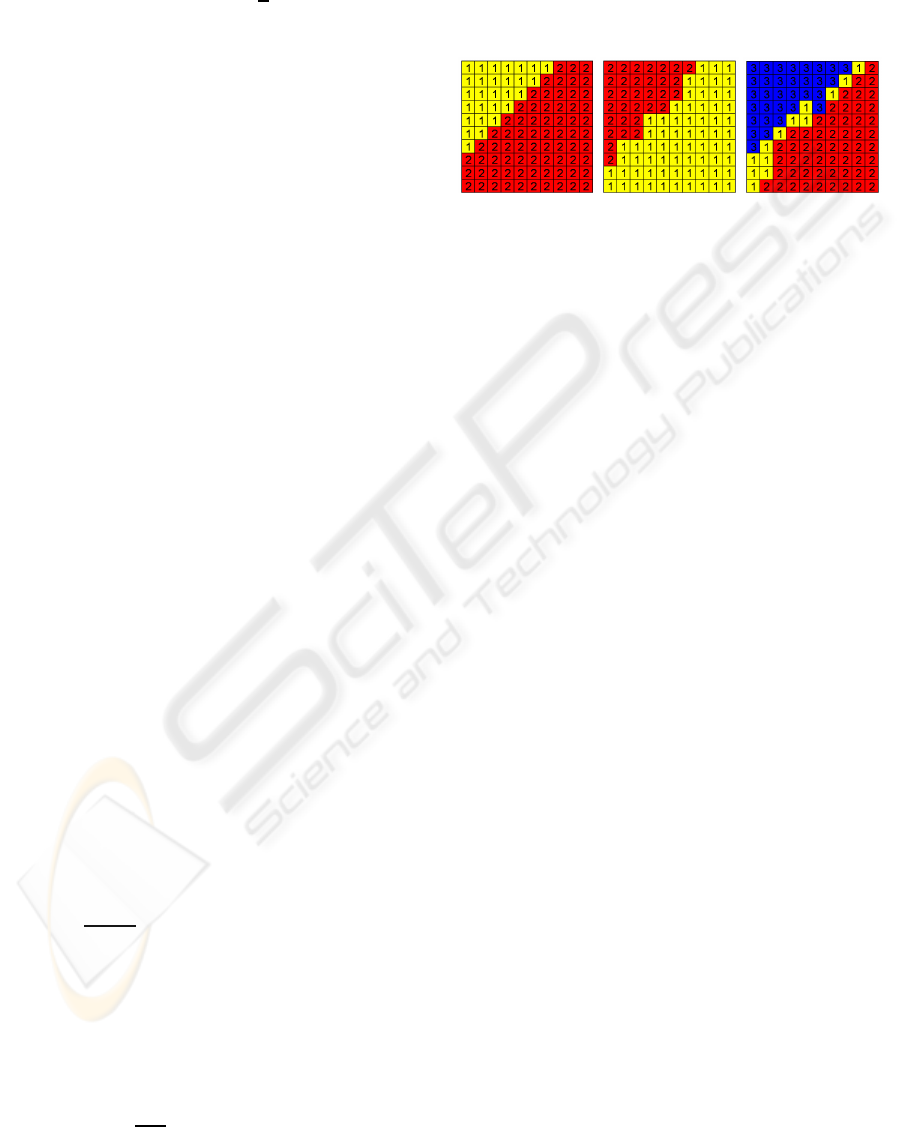
(a) (b) (c)
Figure 3: (a) A ground-truth labelling of a 10 × 10 pixel
image. (b-c) Two automatically produced labellings.
Figure 3 shows a simple example for the pur-
poses of illustration. There are R(2,2) = 2 possi-
ble permutations between Figure 3(a) and Figure3(b):
1 → 1
2 → 2
and
1 → 2
2 → 1
where a → b means
label value “a” in labelling 1 corresponds to label
value “b” in labelling 2. Clearly, the latter produces a
lower error. It is this error which is reported. In the
same way, there are R(3,2) = 6 possible permutations
between Figure 3(a) and Figure 3(c). The permutation
that results in the lowest error is:
1 → 3
2 → 2
1
. In
this case, labels with value “1” in labelling 2 are unas-
signed and so contribute to the error. The accuracy of
the labelling in Figure 3(c) is thus E = 17% of which
U = 13% is attributable to unmatched labels resulting
from incorrect estimation of the number of labels, K.
5 RESULTS AND DISCUSSION
Methods were quantitatively evaluated on images
from a commercial textile archive. The images ranged
in size from 200 × 200 pixels to 2648× 1372 pixels.
These images present challenges to segmentation al-
gorithms as discussed in Introduction. Ground-truth
labellings were produced manually. The test program
was implemented in C and ran on an Intel Core 2
Quad Q6600 2.40GHz PC.
Five methods were evaluated. The first method
was Gaussian mixture model clustering using maxi-
mum likelihood EM parameter estimation. Each pixel
was labelled with the most probable Gaussian com-
ponent index conditioned on the pixel’s RGB values.
The second and third methods were MRF labellings
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
204

found using ICM with and without parameter reesti-
mation, denoted ICM and ICM(P) respectively. The
fourth and fifth methods were MRF labellings found
using α−expansion with and without parameter rees-
timation, denoted α and α(P) respectively. The free
parameter in the MRF models was set to λ=6 (see
Eq.(7)) for all images.
Table 1 reports results when the number of labels
was assumed known (i.e., K was the same as in the
ground-truth). Table 2 reports results for the more
difficult (and more realistic) situation in which K was
unknown. The value of K was estimated based on the
BIC values obtained when EM was used to optimise
the parameters of the GMM. The number of colour
dyes used is often limited by production costs in the
type of textile production represented in the data set.
Therefore, very large values of K can be ruled out a
priori. Specifically, values of K from 1 to 10 were
considered.
Tables 1 and 2 show the errors evaluated us-
ing the method in Section 4 as well as the execu-
tion times. The images, their ground-truth, and seg-
mentations are shown in Tables 3 to 7. In every
case, α−expansion with parameter estimation gave
the lowest error. In many cases ICM with param-
eter estimation performed better than α−expansion
without parameter estimation. This suggests that
parameter reestimation is important for these meth-
ods. GMM gave the highest error. In every case,
α−expansion with parameter reestimation was the
slowest. ICM(P) was slower than ICM, α(P) was
slower than α and GMM was fastest. For each al-
gorithm, computational expense increases with K.
Printing was not always used to create the textiles.
In the textile image in Table 3, there are four differ-
ent colours of filling yarn (i.e., the yarn that runs hor-
izontally). However, the strong texture and uneven
appearance resulted in BIC estimating K as 7. The
graph plots the BIC value against K. Error bars denote
± a standard deviation (σ) estimated over 10 runs for
each value of K. Segmentation results using K = 4
and K
BIC
= 7 are shown. In both cases, α-expansion
with parameter reestimation is clearly superior.
It is interesting to note that although K was usu-
ally overestimated by BIC, the effect of this on the
segmentation error for α−expansion with parameter
reestimation was not always large. For example, it can
be seen that there is no large difference in error with
different K in Table 3. The α−expansion algorithm
can be understood as a competition between different
labels. In every expansion, α takes one value from
{1,2,...K} and makes some of the pixels become α
simutaneously. If the change is accepted, parameters
will be reestimated, a learning process. This helps
to balance the percentage of different labels. The
ground-truth for the textile image in Table 3 contains
four colours, while K
BIC
= 7, but after α−expansion
with re-estimation only 0.4% of pixels are assigned
labels 5, 6, or 7. Similar comments apply to the tex-
tile images in Table 5 and Table 6. Sometimes, larger
K can help to distinguish similar colors. For exam-
ple, in Table 6, K = 8 is not enough to distinguish
the brown and red colors due to the texture effects
and dye degradation, but K
BIC
= 9 could and gave a
smaller error rate.
In the fabric in Table 7, filling yarns were inserted
into the warp yarns to create the floral pattern. Here,
when K = 3, α(P) is superior to the other methods, but
when K
BIC
= 7, although α(P) is better than others, it
loses accuracy.
Tables 4 and 5 show less strongly-textured fab-
rics. Nevertheless, they are problematic. A small
cropped patch of the textile image in Table 5 is shown
magnified in Figure 4(b) where yellow and blue re-
gions overlap and create green. In order to avoid
gaps between different colour regions, two dyes may
be overlapped slightly, thus producing a third colour
and causing difficulty for colour segmentation. Fig-
ure 4 graphically illustrates this problem. Figure 4(c)
shows an annotated ground-truth. However, the α-
expansion method separates the overlapping area into
another colour region as shown in Figure 4(d).
6 CONCLUSIONS
In this paper, we have addressed colour separation
of textiles in order to recover printed designs and
woven patterns from archival image data. An eval-
uation method was proposed and used to compare
pixel labellings obtained using MRFs optimised using
α−expansion and ICM both with and without param-
eter reestimation. These algorithms were initialised
based on Gaussian mixture colour models and BIC
was used to select the number of distinct class labels.
For all the images tested, α−expansion with
parameter reestimation was the most accurate
and the most computationally expensive method.
α−expansion without parameter reestimation gave
similar performance to ICM with parameter reesti-
mation. BIC based on GMM usually overestimated
the number of class labels. However, this did not al-
ways result in α−expansion with parameter reestima-
tion obtaining a less accurate result. In fact, in one
case the accuracy was improved.
The pixel labellings produced suggest ways of
compactly representing image content in terms of
colour and shape. Future work will explore their use
EXTRACTING PRINTED DESIGNS ANDWOVEN PATTERNS FROM TEXTILE IMAGES
205
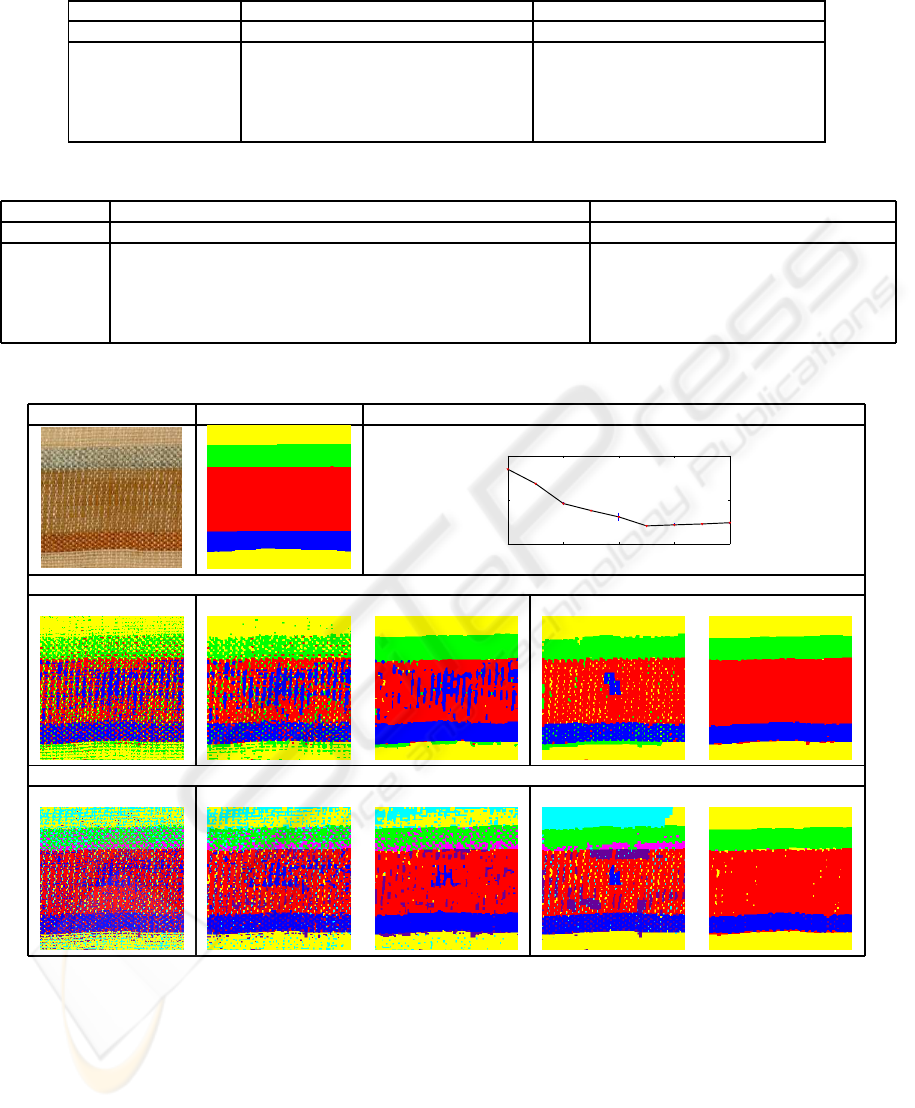
Table 1: Error rates and computing times with known K.
Image Error(%): E Time (s)
Table Size K GMM ICM ICM(P) α α(P) GMM ICM ICM(P) α α(P)
3 200×200 4 39.07 30.85 13.56 11.68 3.30 0.19 0.36 1.14 0.93 1.21
4 1400×544 7 20.85 17.40 15.90 17.04 12.83 7.70 12.93 39.40 50.53 53.76
5 1268×556 7 17.05 14.27 12.23 12.90 6.63 7.02 11.82 36.21 34.21 65.95
6 996×608 8 48.99 42.89 31.56 34.18 24.99 4.97 9.61 33.49 29.11 50.82
7 1594×896 3 25.60 24.00 22.67 23.39 4.65 5.20 10.18 33.09 36.62 55.01
Table 2: Error rates and computing times with K estimated automatically.
Image Error(%): E [U ] Time (s)
Table K
BIC
GMM ICM ICM(P) α α(P) GMM ICM ICM(P) α α(P)
3 7 44.97[30.39] 35.00[25.25] 19.99[17.07] 32.75[27.65] 5.52[0.40] 0.28 0.55 1.87 1.19 2.53
4 7 20.85[0.00] 17.40[0.00] 15.90[0.00] 17.04[0.00] 12.83[0.00] 7.70 12.93 39.40 50.53 53.76
5 9 18.31[9.69] 16.12[9.58] 15.05[9.53] 15.39[9.54] 8.37[4.43] 9.11 15.03 46.13 53.16 100.10
6 9 47.79[6.83] 40.75[5.64] 30.623[9.19] 34.66[8.32] 19.01[0.50] 7.96 12.88 39.49 34.47 63.02
7 7 45.15[44.10] 42.99[42.34] 45.27[44.92] 46.76[46.37] 37.53[36.76] 10.52 20.40 70.44 115.41 190.27
Table 3: Segmentation results on a 200×200 textile image (
c
Liberty Fabric).
Original ground truth BIC
2 4 6 8 10
4.4
4.6
4.8
x 10
5
K
BIC
K = 4
GMM-EM ICM ICM(P) α α(P)
K
BIC
= 7
GMM-EM ICM ICM(P) α α(P)
in content-based retrieval and browsing.
ACKNOWLEDGEMENTS
The authors wish to thank Anna Buruma and Martin
Coward of Liberty Fabric, and Peter Taylor for help-
ful discussions and advice. This research was sup-
ported by the UK Technology Strategy Board grant
“FABRIC: Fashion and Apparel Browsing for Inspi-
rational Content” in collaboration with Liberty Fab-
ric, System Simulation, Calico Jack Ltd., and the Vic-
toria and Albert Museum. The Technology Strategy
Board is a business-led executive non-departmental
public body, established by the government. Its mis-
sion is to promote and support research into, and de-
velopment and exploitation of, technology and inno-
vation for the benefit of UK business, in order to in-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
206

Table 4: Segmentation results on a 1400×544 textile image (
c
Liberty Fabric).
Original Ground truth BIC
2 4 6 8 10
2.6
2.8
3
x 10
5
BIC
K
K = K
BIC
= 7
GMM-EM ICM ICM(P) α α(P)
(a) (b) (c) (d)
Figure 4: (a) Cropping a small patch of original image (b) Original image patch (c) “Ground truth” (d) α-expansion result.
crease economic growth and improve the quality of
life. It is sponsored by the Department for Inno-
vation, Universities and Skills (DIUS). Please visit:
http://www.innovateuk.org/ for further information.
REFERENCES
Besag, J. (1986). On the statistical analysis of dirty picu-
tures. Journal of Royal Statistical Sociely, Series B,
48(3):259–302.
Boykov, Y. and Kolmogorov, V. (2004). An experimental
comparison of min-cut / max-flow algorithms for en-
ergy minimization in vision. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 26:1124–
1137.
Boykov, Y., Veksler, O., and Zabih, R. (November 2001).
Fast aproximate energy minimization via graph cut.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 23, no. 11:1222–1239.
Deng, Y. and Manjunath, B. (2001). Unsupervised segmen-
tation of color-texture regions in images and video.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 23:800–810.
Gupta, L. and Sortrakul, T. (1998). A Gaussian mixture
based image segmentation algorithm. Pattern Recog-
nition, 31(3):315–325.
Kato, Z. and Pong, T. C. (2006). A Markov random field
image segmentation model for color texture images.
Image and Vison Computing, 24:1103–1114.
Li, S. Z. (1995). Markov Random Field Modeling in Com-
puter Vision. Springer-Verlag.
Permuter, H., Francos, J., and Jermyn, I. H. (2003). Gaus-
sian mixture models of texture and color for image
database retrieval. Acoustics, Speech and Signal Pro-
cessing, 3:569–572.
Potts, R. (1952). Some generalized order-disorder transfor-
mation. Proc. Cambridge Philosophical Soc., 48:106–
109.
Roberts, S. J., Husmeier, D., Rezek, I., and Penny, W.
(1998). Bayesian approaches to Gaussian mixture
modeling. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 20(11):1133–1142.
Szeliski, R., Zabih, R., Scharstein, D., Veksler, O., Kol-
mogorov, V., Agarwala, A., Tappen, M., and Rother,
C. (2008). A comparative study of energy min-
imization methods for Markov random fields with
smoothness-based priors. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 30:1068–
1080.
Valiente, J. M., Carretero, M. C., Gmis, J. M., and Albert, F.
(2001). Image processing tool for the purpose of tex-
tile fabric modeling. In 12th International Conference
on Designs Tools and Methods.
Wu, Y., Yang, X., and Chan, K. L. (2003). Unsupervised
colour image segmentation based on Gaussian mix-
ture model. Information, Communications and Signal
Processing, 1:541–544.
Zabih, R. and Kolmogorov, V. (2004). Spatially coherent
clustering using graph cuts. IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion, 2:473–444.
EXTRACTING PRINTED DESIGNS ANDWOVEN PATTERNS FROM TEXTILE IMAGES
207
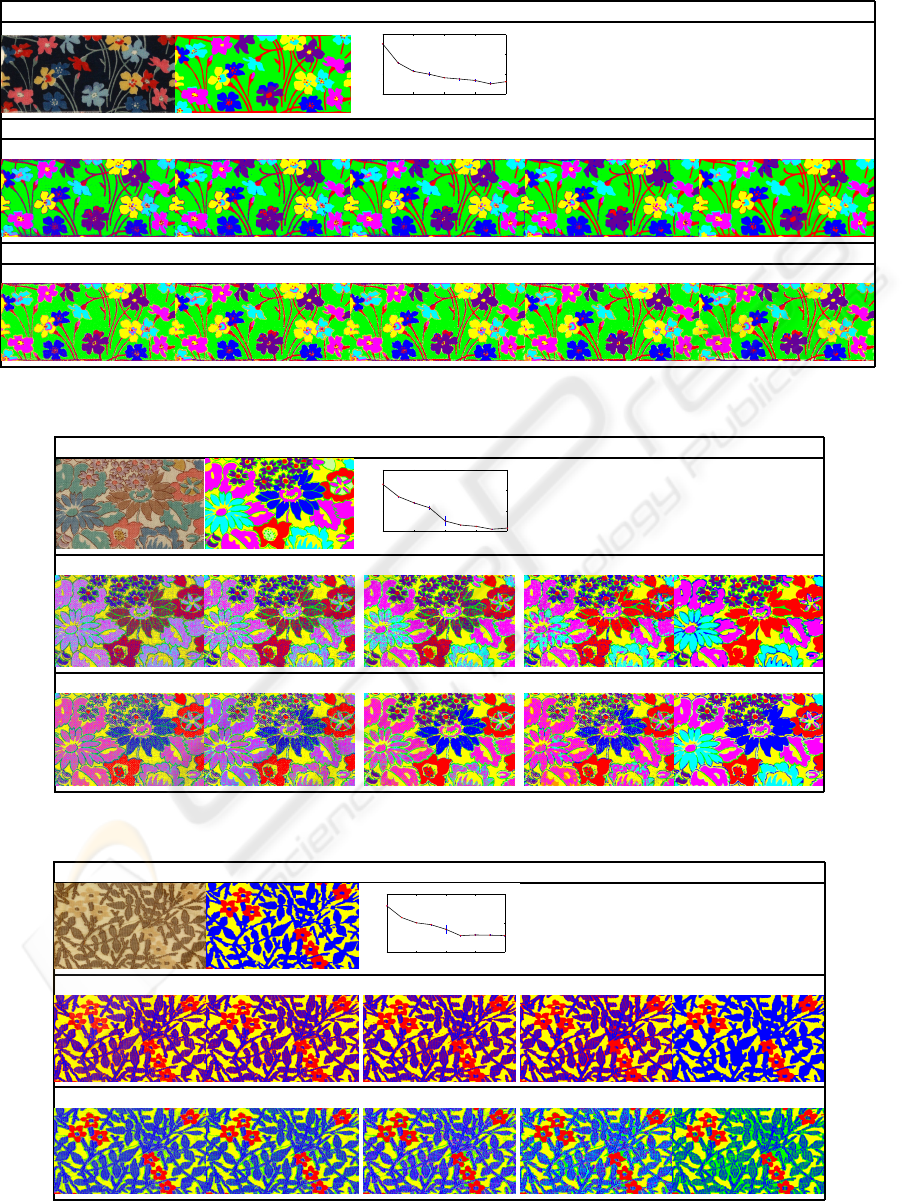
Table 5: Segmentation results on a 1268×556 textile image (
c
Liberty Fabric) with small texture affection.
Original Ground truth BIC
2 4 6 8 10
1.15
1.2
1.25
1.3
x 10
5
K
BIC
K = 7
GMM-EM ICM ICM(P) α α(P)
K
BIC
= 9
GMM-EM ICM ICM(P) α α(P)
Table 6: Segmentation results on a 996×608 textile image (
c
Liberty Fabric).
Original Ground truth BIC
2 4 6 8 10
1.25
1.3
1.35
1.4
x 10
5
K
BIC
GMM (K = 8) ICM (K = 8) ICM(P) (K = 8) α (K = 8) α(P) (K = 8)
GMM (K
BIC
= 9) ICM (K
BIC
= 9) ICM(P) (K
BIC
= 9) α (K
BIC
= 9) α(P) (K
BIC
= 9)
Table 7: Segmentation results on a 1594×896 textile image (
c
Liberty Fabric).
Original Ground truth BIC
2 4 6 8 10
1.1
1.15
1.2
x 10
5
K
BIC
GMM (K = 3) ICM (K = 3) ICM(P) (K = 3) α (K = 3) α(P) (K = 3)
GMM (K
BIC
= 7) ICM (K
BIC
= 7) ICM(P) (K
BIC
= 7) α (K
BIC
= 7) α(P) (K
BIC
= 7)
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
208
