
A TOOL ENVIRONMENT FOR SPECIFYING AND VERIFYING
MULTI-AGENT SYSTEMS
Christian Schwarz, Ammar Mohammed
Universit¨at Koblenz-Landau, Computer Science Department, 56070 Koblenz, Germany
Frieder Stolzenburg
Hochschule Harz, Automation and Computer Sciences Department, 38855 Wernigerode, Germany
Keywords:
Multi-agents specification, Verification, Hybrid automata.
Abstract:
We present a tool environment with a constraint logic programming core, that allows us to specify multi-agent
systems graphically and verify them automatically. This combines the advantages of graphical notations from
software engineering and formal methods. We demonstrate this on a Robocup rescue scenario.
1 INTRODUCTION
Specifying the behavior of multi-agent systems
(MAS) in safety critical environments is a demand-
ing task. Henzinger (1996) introduced Hybrid Au-
tomata (HA) which have been used to model and
verify MAS, especially because of their capability
to catch both, the continuous dynamics of physical
systems and the discrete evolution of computational
systems. Mohammed and Stolzenburg (2008, 2009)
mention several of application areas and benchmarks.
With the help of verification tools like HyTech (Hen-
zinger et al., 1995) and PHAVer (Frehse, 2005) one
can verify and control multi-agent plans. But the spec-
ification and verification of MAS behaviors by means
of hybrid automata is still a challenging task.
One of the problems, which is especially difficult
for MAS, is that the state space grows exponentially
in the number of states in the composed automata.
Mohammed and Stolzenburg (2008) have presented
an approach based on constraint logic programming
(CLP) which tackles this problem. However, so far
a graphical user-interface for the definition of MAS
has not been available. Therefore, this paper aims at
the simplification of the specification process by tak-
ing advantage of the graphical notations taken from
software engineering more directly. Mohammed and
Schwarz (2009) presented a prototype, that allows to
enter the model of a hybrid automaton and its re-
quirements graphically and which automates the ver-
ification process. Here, we present an extension of
this tool and demonstrate it in a scenario from the
RoboCup rescue scenario.
2 HYBRID AUTOMATA
We describe MAS by means of several hybrid au-
tomata, where a single agent is represented by one au-
tomaton. This section briefly into their the syntax and
semantics. A hybrid automaton is represented graph-
ically as a state transition diagram like statecharts in
the unified modeling language (UML) Object Man-
agement Group, Inc. (2009), augmented with mathe-
matical annotations on transitions and locations. For-
mally speaking, a hybrid automaton, which represents
an agent in a continuous domain, is defined as fol-
lows:
Definition 1: A hybrid automaton is a tuple H =
(X, Q, Inv, Flow, E, Jump, Reset, Event,
σ
0
) where:
• X is a set of real variables that describe the con-
tinuous dynamics of the automaton.
• Q is a finite set of control locations.
• Inv(q) is the invariant predicate, which assigns a
constraint on the valuation to each location.
• Flow(q) is the flow predicate on the valuation for
each location. In the graphical representation, a
flow of a variable x is denoted as ˙x.
323
Schwarz C., Mohammed A. and Stolzenburg F. (2010).
A TOOL ENVIRONMENT FOR SPECIFYING AND VERIFYING MULTI-AGENT SYSTEMS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 323-326
DOI: 10.5220/0002727703230326
Copyright
c
SciTePress

• E ⊆ Q× Q is the discrete transition relation over
the control locations. Each edge may have the fol-
lowing annotations:
Jump denotes a jump condition (guard), which is
a constraint over the variables that must hold
to fire transitions. Omitting a jump condition
means, that it is true.
Reset is a constraint, which may reset the vari-
ables by executing a specific assignments. In
the graphical representation, x
′
= v denotes that
the variable x is reset to the value v. Omitting
Reset means, that the variablesare not changed.
Event is a synchronization label, used to syn-
chronize and coordinate concurrent automata.
•
σ
0
∈ Q× R
n
is the initial state.
The semantics of a hybrid automaton is defined in
terms of a labeled transition system between states,
where a state is defined as follows:
Definition 2: The state
σ
of a hybrid automaton is
given by
σ
= hq, vi ∈ Q × R
n
where v = (a
1
, . . . , v
n
)
and v
i
assigns a value to each variable x
i
∈ X. The
state is admissible iff Inv(q)[v] holds.
A state transition system of a hybrid automaton
H starts with the initial state
σ
0
. It then evolves de-
pending on two kinds of transitions: continuous tran-
sitions, capturing the continuous evolution of states,
and discrete transitions, capturing the changes of lo-
cation. More formally, we can define the operational
semantics as follows:
Definition 3: For each transition between two admis-
sible states
σ
1
= hq
1
, v
1
i and
σ
2
= hq
2
, v
2
i one of the
following condition holds:
(discrete) There is an edge e = (q
1
, q
2
) ∈ E,
Jump(e)[v
1
] holds and the variables are reset ac-
cording to Reset(e). In addition an event a ∈
Event(e) occurs. A discrete transition can be writ-
ten as q
1
a
→ q
2
.
(continuously) In this case q
1
= q
2
holds, ∆t is the
time spent in q
1
and v
1
and v
2
are valuations of
the variables according to Flow(q
1
) with respect
to ∆t. The invariant predicate Inv(q
1
) must hold
continuously during ∆t.
The continuous evolution generates an infinite
number of reachable states. Thus the state-space ex-
ploration techniques require an appropriate symbolic
representation for sets of states. We represent the in-
finite states symbolically as finite intervals which are
called regions.
Definition 4: A region Γ = hq,Vi is the set of possible
states reached at location q by means of continuous
transitions, where V represent an interval of reached
valuations of the variables. A region Γ is admissible
if inv(q)[v] holds for all v ∈ V.
Now, the run of hybrid automata can be defined as
a form of reached regions, where the change from one
region to another is induced using a discrete step.
Definition 5: A run of hybrid automaton H is
∑
H
=
Γ
0
Γ
1
, ..., a (possibly infinite) sequence of admissible
regions, where a transition from a region Γ
i
to a region
Γ
i+1
is enabled (written as Γ
i
a
→ Γ
i+1
), if q
i
a
→ q
i+1
,
where a ∈ Event is the generated event before the con-
trol goes to the region Γ
i+1
. Γ
0
is the initial region
reached from a start state
σ
0
by means of continuous
transitions.
The operational semantics is the basis for veri-
fication of a hybrid automaton. In particular, model
checking of a hybrid automaton is defined in terms of
the reachability analysis of its underlying transition
system. The most useful question to ask about hybrid
automata is the reachability of a given state. Thus, we
define the reachability of states as follows.
Definition 6: A region Γ
i
is called reachable in
∑
H
, if
Γ
i
⊆
∑
H
. Consequently, a state
σ
j
is called reachable,
if there is a reached region Γ
i
such that
σ
j
∈ Γ
i
To specify MAS, hybrid automata can be com-
posed in parallel, where a hybrid automaton is given
for each agent in the MAS, and communication be-
tween the different agents may occur via shared vari-
ables and synchronization labels. Technically, the par-
allel composition of hybrid automata is obtained from
the different parts using a Cartesian product con-
struction (composition) of the participating automata.
The transitions from the different automata are in-
terleaved, unless they share the same synchroniza-
tion label. In this case, they are synchronized during
the execution. Differently to most of hybrid automata
techniques, Mohammed and Stolzenburg(2008) show
how the composition of hybrid automata can be con-
structed on the fly. Additionally, they presented a CLP
approach to encode the previous semantics.
3 THE RESCUE EXAMPLE
In the RoboCup rescue simulation league (Tadokoro
et al., 2000) a team of heterogeneous agents is simu-
lated in a city which is partly destroyed by an earth-
quake. The agents (e.g. police, fire brigade and am-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
324
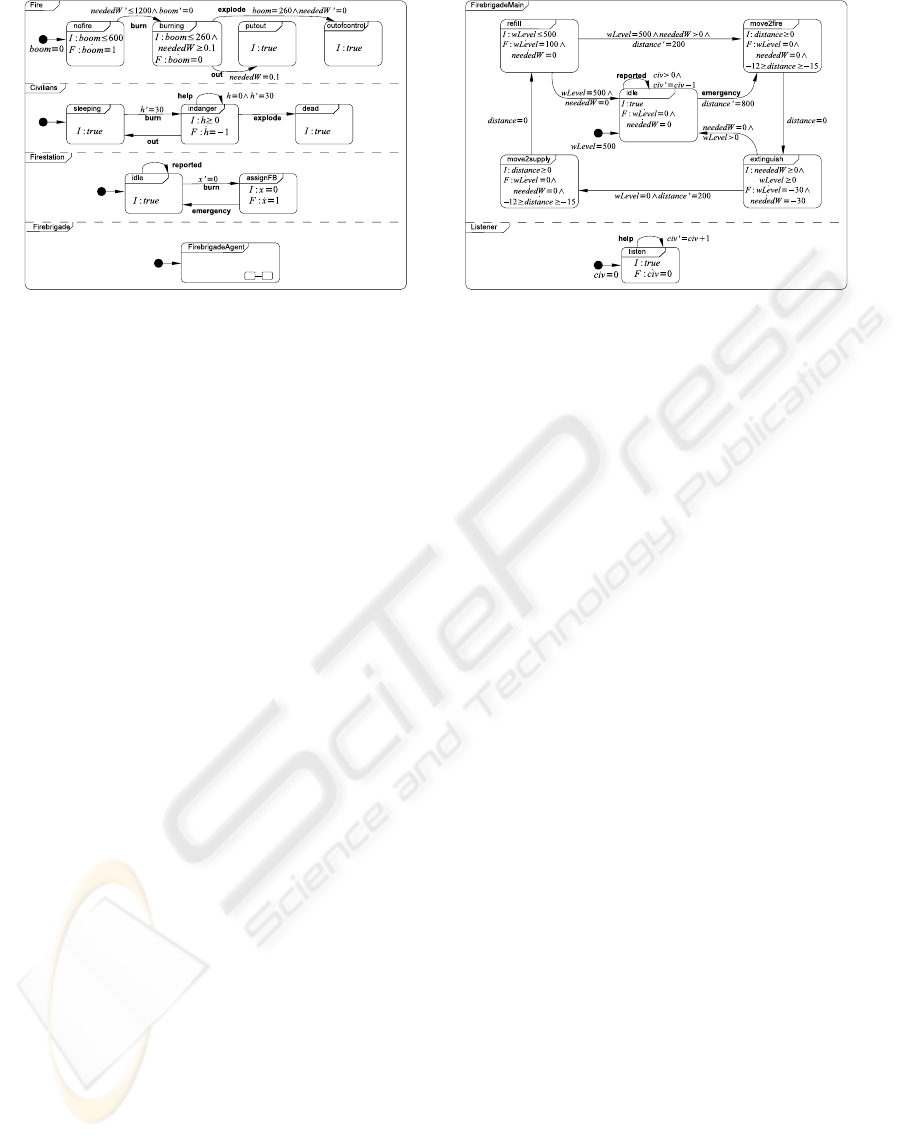
(a) The environment (b) The fire brigade agent
Figure 1: A scenario from the RoboCup rescue simulation league modeled as hybrid automata.
bulance) can solve one specific task only. So the need
for coordination and synchronization is obvious.
3.1 Specification
Consider the following simple scenario. When a fire
breaks out somewhere in the city, a fire brigade agent
is ordered by its headquarters to extinguish the fire.
If the agent runs out of water it has to refill its tank
at a supply station and return to the fire to complete
its task. When the fire is put out, the brigade agent
will become idle again and wait for its next opera-
tion. Additionally the agent has to report any discov-
ered injured civilian. A limiting factor is, that the fire
will eventually get out of control, so it must be extin-
guished within a specified time limit.
The environment is modeled in Fig. 1(a). The fire
will start within the first 10 minutes of the simulation.
The variable neededW represents the amount of water
that is needed to put it off. The civilians are modeled
to be sleeping initially. When the fire breaks out, they
will wake up and call for help periodically. The task
of the fire station is to assign a fire brigade to a fire as
soon as it is discovered.
The fire brigade agent is modeled in Fig. 1(b). It
consists of two parts: the main control structure Fire-
brigadeMain and Listener that counts the number of
discovered civilians. FirebrigadeMain starts in idle
and jumps to move2fire, which models the moving to-
wards the fire, when it is assigned by the fire station.
The distance between fire and the the fire brigade is
modeled by the variable distance.
After it has arrived at the fire, the fire brigade tries
to extinguish it. This is modeled by decreasing the
value of wLevel (the water in the tank) , and neededW
(the water needed to put out the fire) by the same rate.
If the water in the tank runs out, the fire brigade has
to move to the next refill station. After the tank is re-
filled, the fire brigade moves towards the fire again.
After the fire is put off or is got out of control, the fire
brigade becomes idle again and can then report any
found civilians.
3.2 Verification
Using this model, we can now demonstrate some ex-
emplary model checking tasks. We can examine if
certain control locations are reachable. So we can
ask: “Is it possible to extinguish the fire?” ( putout
is reachable), or “Won’t the fire get out of control?”,
(outofcontrol is not reachable). It is also possible, to
check the reachability of composed locations. This al-
lows questions like “Won’t the fire brigade move to
the fire if it is not burning?” Then, no composed loca-
tions are reachable, where Firebrigade is in move2fire
and Fire is in nofire, putout or outofcontrol. Further-
more, we can check the reachability of certain in-
tervals in the continuous valuation of the automaton,
e.g.: “Won’t the agent try to extinguish with an empty
water tank?” This would hold if extinguish is active
while wLevel < 0.
Finally, we can check properties of runs. This al-
lows more complex questions like “Does the agent re-
port all discovered civilians?” This question contains
two properties to be checked: (a) all discovered civil-
ians are reported eventually and (b) the agent does
never report a civilian than he did not find. Property
(a) corresponds to the fact that from every reachable
state there is a state reachable where all discovered
civilians have been reported. Property (b) holds if in
the history of each reachable state the number of tran-
sitions labeled with help is always greater or equal
than the number of transitions labeled with reported.
A TOOL ENVIRONMENT FOR SPECIFYING AND VERIFYING MULTI-AGENT SYSTEMS
325

Figure 2: A screenshot of HieroMate while verifying the fire
brigade example (some of the automata are hidden).
4 THE HIEROMATE TOOL
Mohammed and Schwarz (2009) initially presented
a tool for graphical specification and verification of
hierarchical hybrid automata (HHA), that include hi-
erarchical specifications as known from UML state-
charts, such that the overall system can be expressed
on several levels of abstraction. In HHA, locations are
generalized (cf. Mohammed and Stolzenburg, 2008):
The set of all locations Q is partitioned simple, com-
posite and concurrent locations. In essence, the loca-
tions of plain hybrid automata correspond to simple
locations in HHA.
Now, in this paper, the concurrent view based on
the outline in Mohammed and Stolzenburg (2008) has
also been plugged into the tool, such that a user can
select which type of view is needed to be modeled.
This tool works as a front end for a model checking
engine that is written in the CLP language ECLiPSe
Prolog (Apt and Wallace, 2007). The tool assists the
user in specifying hybrid automata (and MAS) by
supporting graphical specification, on-the-fly syntax
checking, and automated CLP code generation.
The user interaction is realized mainly using con-
text sensitive menus that allow only meaningful ac-
tions e.g. the user will be able to add another location
to an automaton by right clicking onto the automa-
ton and selecting the item “Add location” from the
context menu. The specification can then be checked
directly in the tool. Therefore the user can either spec-
ify queries manually using CLP Prolog, use the tool
to generate simple queries automatically, or combine
both methods. Fig. 2 shows a screenshot of HieroMate
while verifying the rescue example.
5 CONCLUSIONS
In this paper, we presented a tool environment with
a constraint logic programming core that is able to
graphically specify and formally verify MAS in terms
of hybrid automata, where the graphical specification
and a requirement can be given to the tool and it
will convert them into a specification written in CLP.
Then, the resulting CLP specification will be checked
using an abstract state machine in terms of reacha-
bility analysis automatically. The paper has demon-
strated this on a MAS scenario taken from rescue sce-
nario.
REFERENCES
Apt, K. R. and M. Wallace (2007). Constraint Logic Pro-
gramming Using ECLiPSe. Cambridge, UK: Cambridge
University Press.
Frehse, G. (2005). PHAVer: Algorithmic verification of hy-
brid systems past HyTech. In M. Morari and L. Thiele
(Eds.), Hybrid Systems: Computation and Control, 8th
International Workshop, Proceedings, LNCS 3414, pp.
258–273. Springer.
Henzinger, T. (1996). The theory of hybrid automata. In
Proceedings of the 11th Annual Symposium on Logic in
Computer Science, New Brunswick, NJ, pp. 278–292.
IEEE Computer Society Press.
Henzinger, T., P.-H. Ho, and H. Wong-Toi (1995). HyTech:
The Next Generation. In IEEE Real-Time Systems Sym-
posium, pp. 56–65.
Mohammed, A. and C. Schwarz (2009). HieroMate: A
graphical tool for specification and verification of hier-
archical hybrid automata. In B. Mertsching, M. Hund,
and Z. Aziz (Eds.), KI 2009: Advances in Artificial In-
telligence, Proceedings of 32nd Annual German Confer-
ence on Artificial Intelligence, LNAI 5803, Paderborn,
pp. 695–702. Springer, Berlin, Heidelberg, New York.
Mohammed, A. and F. Stolzenburg (2008). Implementing
hierarchical hybrid automata using constraint logic pro-
gramming. In S. Schwarz (Ed.), Proceedings of 22nd
Workshop on (Constraint) Logic Programming, Dres-
den, pp. 60–71. University Halle Wittenberg, Institute of
Computer Science. Technical Report 2008/08.
Mohammed, A. and F. Stolzenburg (2009). Using constraint
logic programming for modeling and verifying hierarchi-
cal hybrid automata. Arbeitsberichte des Fachbereichs
Informatik 6/2009, Universit¨at Koblenz-Landau.
Object Management Group, Inc. (2009). OMG Unified
Modeling Language (OMG UML): Infrastructure; Su-
perstructure. Object Management Group, Inc.
Tadokoro, S. et al. (2000). The RoboCup-Rescue project:
A robotic approach to the disaster mitigation problem.
In Proceedings of IEEE International Conference on
Robotics and Automation (ICRA 2000), pp. 4089–4104.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
326
