
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL
SERVICE RELIABILITY IN A COMPOSITION SCENARIO
Abhishek Srivastava and Paul G. Sorenson
Department of Computing Science, University of Alberta, Edmonton, Canada
Keywords:
Composite service reliability, Service selection.
Abstract:
Selecting an optimal service from a group of functionally equivalent ones is non-trivial. This is more so when
the service to be selected is part of a composite application. Research in the past has resolved this issue
making use of the Quality of Service (QoS) attributes of the services to determine the most optimal from the
functionally equivalents. This paper too attempts to tackle this problem using one of the more important QoS
attributes, reliability. The novelty of the technique proposed here is due to the fact that while papers in the
past have looked upon the reliability of individual services in a service composition in isolation, we take into
account the influence that the interaction among services in a composition has on individual reliabilities. The
service domain along with the interactions is represented as a continuous time Markov chain, and through
appropriate procedure the reliability of individual services is calculated in the form of ‘failure distance’. The
services selected are the ones with the largest values of failure distance. The results of experiments conducted
by us have also been included to validate this technique.
1 INTRODUCTION
The world today is undergoing an economic revolu-
tion wherein service dominated economies are fast
replacing product based manufacturing economies
(Battilani and Fauri, 2007)(Kilburn, 2003). Organi-
zations, in such a scenario, are more inclined towards
offering functionalities as services rather than com-
plete end-products, which the clients may harness ac-
cording to their customized respective requirements.
The extensive penetration of the ‘internet’ in the daily
lives of people figures prominently in the acceptance
and adoption of the service-oriented model. Service
vendors readily make use of this medium, and conve-
niently offer their expertise as web-based services.
A high-level view of the generic service-oriented
architecture (SOA) comprises three main players:
the service-requester, the service-provider, and the
service-registry, as shown in Figure 1 (Papazoglou,
2003).
The service-requester may be a standalone client
or may itself be a service forming part of a mesh of
composite services. The service-requester looks up a
service-registry which is a directory of services where
prospective service-providers publish their identities,
whereabouts, and capabilities with the hope of be-
Service
Registry
Service
Requester
Service
Provider
Figure 1: The basic model of an SOA.
ing ‘discovered’ by prospective clients. The service-
requester, selects a service from this registry which
most closely matches its requirements. The requester
then “loosely” binds with the corresponding service-
provider and makes use of the functionality offered
by the selected service. A more detailed exposition
on this generic view of SOA may be found in (Papa-
zoglou, 2003).
Selecting the most optimal service from the ser-
vice registry is however non-trivial. The criteria for
service selection comprise the list of functionalities
specified by the service requester. Often, however,
more than one service in the registry cater to these
requirements. The issue then is picking out the best
service from these functionally equivalent services.
Effort in the past has been on selecting the ‘best’
service from the functionally equivalent ones on the
basis of various Quality of Service (QoS) parameters
30
Srivastava A. and G. Sorenson P.
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL SERVICE RELIABILITY IN A COMPOSITION SCENARIO.
DOI: 10.5220/0002792300300039
In Proceedings of the 6th International Conference on Web Information Systems and Technology (WEBIST 2010), page
ISBN: 978-989-674-025-2
Copyright
c
2010 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(Ran, 2003) (Kokash, 2005). The service whose QoS
parameters are the best among the lot is selected.
In this paper, we propose a technique to select the
‘best’ among functionally equivalent services on the
basis of one of the QoS parameters, reliability. We
claim that our technique is novel because it calculates
the reliability of individual services taking into ac-
count the influence that the presence of other services
in the domain, particularly the services that it directly
invokes, have on it. By this, we mean the varying
degrees of coupling that services have on each other
in an interactive environment lends its influence on
the reliability figures of individual services. Suppose
for example two services A and B are provided by the
same organization and thus A invokes B much more
than another service offering the same functionality
as B (thus A and B have a high value of coupling).
Further suppose that B is a highly unreliable service.
As A uses B so often, it would appear to A’s parent
that A is quite unreliabile. The reliability of services
in an environment in which the influence of interact-
ing services is taken into account forms the basis of
the technique proposed in this paper. Previous meth-
ods tend to ignore this influence and calculate reliabil-
ity by treating the individual services in isolation (Yu
and Lin, 2004) (Tsai et al., 2004) (Wang et al., 2003)
(Zeng et al., 2003).
The remainder of this paper is structured as fol-
lows. Section 2 is a discussion on relevant related
work done in the past. Section 3 is a discussion on
how the service domain is represented in our work.
Subsequently, the representation of this service do-
main as a continuous time Markov chain (CTMC)
(Norris, 1998)(the CTMC representation is a require-
ment for the proposed technique) is also discussed in
the same section. Section 4 comprises a detailed de-
scription of the use of the CTMC representation to
express how ‘close’ or ‘far’ each individual service is
from the ‘failure’ state taking into account its inter-
actions with other services in the domain. Section 5
describes the experiments conducted by us and the re-
sults of the same, that validate the technique, and fi-
nally Section 6 concludes the paper with pointers at
future work.
2 RELATED WORK
Substantial research has been done in the past on
the issue of computing the reliability of a compos-
ite application on the basis of the individual relia-
bility of its constituent services. The technique dis-
cussed by Yu et al. is for QoS in general and relia-
bility is one among a number of parameters (Yu and
Lin, 2004). Their approach is quite basic. They as-
sume that the reliability values of individual services
are given and the reliability of the composite appli-
cation is simply the product of the reliabilities of in-
dividual constituent services. Tsai et al. present a
method of first calculating the reliability of individ-
ual services using a technique called ‘group testing’
(Tsai et al., 2004). In this technique, the service in
question is put through the same test as a number of
other functionally equivalent services of known reli-
abilities. The other services are assigned appropriate
weights on the basis of their reliability values. De-
pending on how close or far the result of the service
in question is from that of the other services, the ser-
vice is assigned a weight which is an approximate re-
flection of its reliability. Next, using the reliability
of individual services so calculated, the reliability of
the composite application is calculated using one of
various simple formulae depending upon how the in-
dividual services are connected in the application: as
a ‘sequence’, ‘choice’, ‘loop’ or ‘concurrently’. Zeng
et al., in their approach represent the various possi-
ble composite applications as a directed acyclic graph
(DAG) (Zeng et al., 2003). In this DAG, they find
a ‘critical path’. The reliability of the composite ap-
plication is a product of e
rel(s
i
)∗z
i
where rel(s
i
) is the
reliability of service i and z
i
= 1 if service i falls in
the critical path, and z
i
= 0 otherwise. The reliabil-
ities of individual services are calculated using his-
torical data as the ratio of successful service delivery
to total number of invocations. Wang et al. present
an interesting technique for calculating the reliabil-
ity of the service composition (Wang et al., 2003).
Their method assumes that the transition behaviour
of the system from one service to another follows the
Markov process (Norris, 1998). They express a ‘re-
liable’ transfer from each service to every other ser-
vice in the form of a matrix. The reliability of a
service composition is expressed by raising this ma-
trix to a power that is equal to the number of tran-
sition steps required to move from the initial service
to the final service of the composition. Subsequently,
the matrix is raised to all possible powers from 0 to
∞, representing all possible service compositions and
the summation of this geometric progression gives the
reliability of the composition. More recently Epi-
fani et al. present a dynamic modeling technique
wherein Bayesian estimation techniques are used to
dynamically revise the non-functional attributes of the
constituent services of a composite application (Epi-
fani et al., 2009). The posterior distribution of non-
functional attributes such as reliability are determined
on the basis of prior distribution and a better service
composition is achieved.
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL SERVICE RELIABILITY IN A COMPOSITION
SCENARIO
31

All these methods, while being relevant suffer
from the assumption that the reliability of individual
services in a service domain is calculated in isola-
tion. We feel that in an environment like this where
services interact in a complementary manner to form
composite applications, a certain degree of ‘coupling’
among services does exist. This coupling may arise
out of business relationships, better ‘inter usage’ ca-
pability, or other miscellaneous factors. In our work,
we assign a value to the coupling between interact-
ing services. The higher this value, the greater is the
coupling. The reliability calculation of individual ser-
vices is therefore done incorporating these coupling
values. Subsequently, the services with the best indi-
vidual values of reliability, so calculated, collectively
contribute to the best reliability value for the compos-
ite application.
3 SERVICE DOMAIN
REPRESENTATION
In this work, we look at the service domain as a group
of services which are assumed to have been already
discovered. A set of services from this domain need
to be selected and loosely ‘chained’ together to form a
composite application. A common example of a com-
posite application is a ‘trip planner’ whose goal is to
plan a trip for prospective clients. The constituent
services in this case may be: a) a flight reservation
service, b) a hotel booking service, c) a payment pro-
cessing service, etc.
The representation of the service domain in our
work has been done as a multi-tier acyclic graph,
where each tier represents a certain functionality and
is populated by the set of simple services that possess
the capability to perform the respective functionality.
The size of this set is dynamic in nature and is charac-
terized by frequent entry of new service instances, as
well as upgrade and departure of existing ones. The
left panel of Figure 2 shows a simple representation of
this. Services B, C, that are at the same level, repre-
sent functionally equivalent services. The same holds
for services D, E, F, as well as G, H. The work-flow
is from top to bottom, never from bottom to top and
hence there are no cycles. Thus a service at a certain
level ‘invokes’ one of the services at the level immedi-
ately below it, and subsequently this invoked service
invokes one of the services from the next level, and so
on. In this way, a composite application gets formed.
It should be noted that a service invokes one at the
lower level only after it has completed executing its
own task. An example of this service domain repre-
sentation (the ‘trip-planner’ example) is shown on the
right panel of Figure 2.
A variable called ‘coupling’, as mentioned earlier,
is assigned between each service at a certain level to
each and every service at the next immediate level.
The coupling C
i j
, depends upon factors such as busi-
ness relationships between the providers of services
i, and j, degree of ease in inter usage between the
two services, and other miscellaneous factors. A high
value of C
i j
indicates a high degree of coupling be-
tween i, and j. For example, assuming the services
in our trip-planner example, ‘TravelPedia’ and ‘Hote-
loCity’ are provided by the same parent organization.
It would be expected therefore that there would be a
high value of coupling between the two. The value
of coupling between services ranges from 1 to ∞. A
value of 1 indicates ordinary interaction with no spe-
cial bonding between the services, whereas higher
values indicate better bonding. The coupling values
are assigned when a service enters a domain, on the
basis of expert judgement after a thorough investiga-
tion of its nature and interactions.
For each service in the domain, there is a service
completion rate which is the rate at which the respec-
tive service completes the requests. The service com-
pletion rate of service i, µ
i
may be calculated as fol-
lows:
µ
i
=
no. of service requests completed by service i
total time
(1)
Subsequently, a transition rate (λ
i j
) between a calling
service i, and the called service j may be calculated
as:
λ
i j
= C
i j
· µ
i
(2)
where C
i j
is the coupling between services i, and
j, and µ
i
is the service completion rate of service i.
The transition rates are indicated by dotted arrows be-
tween services in the left panel of Figure 2.
Besides these transition rate values, there is a ‘fail-
ure rate’ (λ
i→ f ail
) from each service i in the domain
to the ‘fail’ state. The independent failure rate of each
service i may be expressed as follows,
λ
i→ f ail
=
no. of times service i fails
total up-time
(3)
There is correspondingly a ‘recovery rate’
(λ
f ail→i
) from the fail state to each service i in the
domain. The recovery rate may be calculated as fol-
lows,
λ
f ail→i
=
no. of times service i recovers from failure
total down-time
(4)
The motive behind representing the service do-
main as a CTMC is to take advantage of the various
analysis procedures meant for the latter, and in effect
WEBIST 2010 - 6th International Conference on Web Information Systems and Technologies
32

TravelPedia FlightsCheap
EasyHotels BestHotels HoteloCity
PaymentGate EasyPay
Figure 2: The service domain.
to come up with useful results regarding the reliability
of the system.
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
Log in/out
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
1.0 1.0
--
-- -- --
1.4 1.7
2.1 1.9
1.5
1.4
2.7
2.2
1.1
1.7
1.2
1.9
-- --
--
--
-- -- -- --
-- -- -- --
--
-- -- -- --
--
-- -- --
--
-- -- -- -- -- -- --
--
-- -- -- --
--
-- --
--
--
--
--
--
--
Log in/out
--
1.0
1.0
Figure 3: Coupling values.
Failure rate Recovery rate
Completion rate
0.8
1.7
3.2
1.4
1.4
1.8
2.4
1.0
0.002
1.1
0.7
0.009
0.06
--
0.7
0.5
0.2
0.3
0.08
0.2
0.3
--
0.05
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
0.08
Log in/Log out
Figure 4: Initial failure, recovery, and service completion
rate values.
The transition rates between states in the CTMC
may be expressed in the form of a matrix called the in-
finitesimal generator matrix (IGM). The value of the
i j
th
element of this matrix is equal to the value of the
rate of transition from the i
th
state to the j
th
state of
the CTMC. The sum of the elements in each row of
this matrix is always zero. Therefore the ii
th
element
in each row is the negative of the summation of the
other elements in the row.
The transition rates in the case of our service do-
main are the transition-rate values between services
calculated using equation (2), and the transition-rate
values between the services and the ‘fail’ state are cal-
culated using equations (3) and (4). The infinitesimal
generator matrix for our trip-planner example whose
coupling values between services and service comple-
tion rate values are shown in Figures 3 and 4 is shown
in Figure 5.
In general, every functionality has more than one, and
often many candidate services that can effectively perform
the task, which brings us back to the service selection prob-
lem.
The representation of the service domain in our work has
been done as a multi-tier acyclic graph, where each tier rep-
resents a certain functionality and is populated by the set of
simple services that possess the capability to perform the
respective functionality. The size of this set is dynamic in
nature and is characterized by frequent entry of new service
instances, as well as upgrade and departure of existing ones.
The left panel of figure 2 shows a simple example of this
representation. Services B , C , that are on the same tier, rep-
resent functionally equivalent services. The same holds for
services D, E , F , as well as G, H . The work-flow is from
top to bottom, never from bottom to top and hence there are
no cycles. Thus a service at a certain level ‘calls’ one of
the services at the level immediately below it, and subse-
quently this called service calls one of the services from the
next level, and so on. In this way, a composite service gets
formed. An example of this service domain representation
(the ‘trip-planner’ example) is shown on the right panel of
figure 2.
A variable called ‘coupling’, as mentioned earlier, is as-
signed between each service at a certain level to each and
every service at the next immediate level. The coupling
C
ij
, depends upon factors such as business relationships
between the providers of services i, and j , ease of plug-
in between the two services, and other miscellaneous fac-
tors. A high value of C
ij
indicates a high degree of cou-
pling between i, and j . For example, assuming the services
in our trip-planner example, ‘TravelPedia’ and ‘HoteloCity’
are provided by the same parent organization. It would be
expected therefore that there would be a high value of cou-
pling between the two. The value of coupling between ser-
vices ranges from 1 to ∞. A value of 1 indicates ordinary
interaction with no special bonding between the services,
whereas higher values indicate better bonding.
For each service in the domain, there is a service com-
pletion rate which is the rate at which the respective service
completes the requests. The service completion rate of ser-
vice i, µ
i
may be calculated as follows:
µ
i
=
no. of service requests completed by service i
total time
(1)
Subsequently, a transition rate (λ
ij
) between a calling ser-
vice i, and the called service j may be calculated as:
λ
ij
= C
ij
· µ
i
(2)
where C
ij
is the coupling between services i, and j, and µ
i
is the service completion rate of service i. The transition
rates are indicated by dotted arrows between services in the
left panel of figure 2.
Besides these transition rate values, there is a ‘failure
rate’ (λ
j→fail
) from each service j in the domain to the
‘fail’ state. The independent failure rate of each service j
may be expressed as follows,
λ
j→fail
=
no. of times service j fails
total up time
(3)
There is correspondingly a ‘recovery rate’ (λ
fail→j
)
from the fail state to each service j in the domain. The
recovery rate may be calculated as follows,
λ
fail→j
=
no. of times service j recovers from failure
total down-time
(4)
The ‘calling’ behavior of services at each level in the
domain is assumed to be unaffected by the service selec-
tions prior to it in the domain, i.e. by the service selections
at the function levels above it. The service domain may
thus be represented as a Continuous Time Markov Chain
(CTMC) [6]. This is done by first representing the service
domain as a Stochastic Petri-Net [1], and then converting
the same to the equivalent CTMC representation. A detailed
description of the conversion of a normal representation of
the system to the equivalent CTMC representation is given
in [14].
The motive behind representing the service domain as
a CTMC is to take advantage of the various analysis proce-
dures meant for the latter, and in effect to come up with use-
ful results regarding the reliability of the system. The transi-
tion rates between states in the CTMC may be expressed in
the form of a matrix called the infinitesimal generator ma-
trix . The value of the ij
th
element of this matrix is equal
to the value of the rate of transition from the i
th
state to the
j
th
state of the CTMC. The sum of the elements in each row
of this matrix is always zero. Therefore the ii
th
element in
each row is the negative of the summation of the other ele-
ments in the row. The infinitesimal generator matrix for our
trip-planner example whose coupling values between ser-
vices and service completion rate values are shown in figure
3 is shown below in equation (5):
−2.01.01.0 0 0 0 0 0 0
0 −8.1 0 2.42.92.6 0 0 0.2
00−12.32.65.04.6 0 0 0.1
0 0 0 −5.75 0 0 1.93.80.05
0 0 0 0 −13.4 0 7.0 6.1 0.3
0 0 0 0 0 −5.38 2.23.10.08
0.8 0 0 0 0 0 −1.0 0 0.2
1.4 0 0 0 0 0 0 −1.70.3
00.70.50.009 0.002 1.10.06 0.7 −3.07
(5)
For example, the transition rate value from service BestHo-
domain as a Stochastic Petri-Net [10], and then converting the same to the equivalent
CTMC representation. A detailed description of the conversion of a normal representa-
tion of the system to the equivalent CTMC representation is given in [11].
The motive behind representing the service domain as a CTMC is to take advantage
of the various analysis procedures meant for the latter, and in effect to come up with
useful results regarding the reliability of the system. The transition rates between states
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
Log in/out
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
1.0 1.0
--
-- -- --
1.4 1.7
2.1 1.9
1.5
1.4
2.7
2.2
1.1
1.7
1.2
1.9
-- --
--
--
-- -- -- --
-- -- -- --
--
-- -- -- --
--
-- -- --
--
-- -- -- -- -- -- --
--
-- -- -- --
--
-- --
--
--
--
--
--
--
Log in/out
--
1.0
1.0
(a)
Failure rate Recovery rate
Completion rate
0.8
1.7
3.2
1.4
1.4
1.8
2.4
1.0
0.002
1.1
0.7
0.009
0.06
--
0.7
0.5
0.2
0.3
0.08
0.2
0.3
--
0.05
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
0.08
Log in/Log out
(b)
Fig. 3: (a) Coupling values, (b) Initial failure, recovery, and service completion rate
values
in the CTMC may be expressed in the form of a matrix called the infinitesimal generator
matrix . The value of the ij
th
element of this matrix is equal to the value of the rate of
transition from the i
th
state to the j
th
state of the CTMC. The sum of the elements in
each row of this matrix is always zero. Therefore the ii
th
element in each row is the
negative of the summation of the other elements in the row. The infinitesimal generator
matrix for our trip-planner example whose coupling values between services and service
completion rate values are shown in figure 3 is shown below in equation (6):
I GM =
−2.01.01.0 0 0 0 0 0 0
0 −8.02 0 2.38 2.89 2.55 0 0 0.2
00−12.32 2.64 5.04 4.56 0 0 0.08
0 0 0 −5.79 0 0 1.96 3.78 0.05
0 0 0 0 −13.42 0 7.04 6.08 0.3
0 0 0 0 0 −5.32.16 3.06 0.08
0.8 0 0 0 0 0 −1.0 0 0.2
1.4 0 0 0 0 0 0 −1.70.3
00.70.50.009 0.002 1.10.06 0.7 −3.071
(6)
For example, the transition rate value from service BestHotels to EasyPay is calculated
using equation (2) as follows (shown in bold in the matrix):
λ = C oupling
BestH otels−EasyP ay
∗ completionR ate
BestH otels
=1.9 ∗ 3.2=6.08
Figure 5: Infinitesimal Generator Matrix.
For example, the transition rate value from service
BestHotels to EasyPay is calculated using equation
(2) as follows (shown in bold in the matrix):
λ =
Coupling
BestHotels-EasyPay
∗Completion-rate
BestHotels
= 1.9 ∗ 3.2 = 6.08
The last column and row (9th from left and top) of the
matrix correspond to the fail state, and its elements
are simply obtained from the table in Figure 4 as the
initial failure and recovery rate values respectively of
each service.
A number of analysis techniques require that the
transition values between the different states of a
CTMC be expressed as a probability. To take advan-
tage of these techniques, an approximate transition
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL SERVICE RELIABILITY IN A COMPOSITION
SCENARIO
33

probability matrix may be obtained from the infinites-
imal generator matrix, which is called the embedded
Markov chain matrix. Each i j
th
element of this ma-
trix may be obtained as the ratio of the corresponding
element of the infinitesimal generator matrix to the
sum of all the elements except the ii
th
element in the
corresponding row of the infinitesimal generator ma-
trix. The ii
th
element of the embedded Markov chain
matrix is always zero. The embedded Markov chain
matrix P for our trip-planner example corresponding
to the infinitesimal generator matrix is shown in Fig-
ure 6.
In general, every functionality has more than one, and
often many candidate services that can effectively perform
the task, which brings us back to the service selection prob-
lem.
The representation of the service domain in our work has
been done as a multi-tier acyclic graph, where each tier rep-
resents a certain functionality and is populated by the set of
simple services that possess the capability to perform the
respective functionality. The size of this set is dynamic in
nature and is characterized by frequent entry of new service
instances, as well as upgrade and departure of existing ones.
The left panel of figure 2 shows a simple example of this
representation. Services B , C , that are on the same tier, rep-
resent functionally equivalent services. The same holds for
services D , E , F , as well as G, H . The work-flow is from
top to bottom, never from bottom to top and hence there are
no cycles. Thus a service at a certain level ‘calls’ one of
the services at the level immediately below it, and subse-
quently this called service calls one of the services from the
next level, and so on. In this way, a composite service gets
formed. An example of this service domain representation
(the ‘trip-planner’ example) is shown on the right panel of
figure 2.
A variable called ‘coupling’, as mentioned earlier, is as-
signed between each service at a certain level to each and
every service at the next immediate level. The coupling
C
ij
, depends upon factors such as business relationships
between the providers of services i, and j , ease of plug-
in between the two services, and other miscellaneous fac-
tors. A high value of C
ij
indicates a high degree of cou-
pling between i, and j . For example, assuming the services
in our trip-planner example, ‘TravelPedia’ and ‘HoteloCity’
are provided by the same parent organization. It would be
expected therefore that there would be a high value of cou-
pling between the two. The value of coupling between ser-
vices ranges from 1 to ∞. A value of 1 indicates ordinary
interaction with no special bonding between the services,
whereas higher values indicate better bonding.
For each service in the domain, there is a service com-
pletion rate which is the rate at which the respective service
completes the requests. The service completion rate of ser-
vice i, µ
i
may be calculated as follows:
µ
i
=
no. of service requests completed by service i
total time
(1)
Subsequently, a transition rate (λ
ij
) between a calling ser-
vice i, and the called service j may be calculated as:
λ
ij
= C
ij
· µ
i
(2)
where C
ij
is the coupling between services i, and j , and µ
i
is the service completion rate of service i. The transition
rates are indicated by dotted arrows between services in the
left panel of figure 2.
Besides these transition rate values, there is a ‘failure
rate’ (λ
j→fail
) from each service j in the domain to the
‘fail’ state. The independent failure rate of each service j
may be expressed as follows,
λ
j→fail
=
no. of times service j fails
total up time
(3)
There is correspondingly a ‘recovery rate’ (λ
fail→j
)
from the fail state to each service j in the domain. The
recovery rate may be calculated as follows,
λ
fail→j
=
no. of times service j recovers from failure
total down-time
(4)
The ‘calling’ behavior of services at each level in the
domain is assumed to be unaffected by the service selec-
tions prior to it in the domain, i.e. by the service selections
at the function levels above it. The service domain may
thus be represented as a Continuous Time Markov Chain
(CTMC) [6]. This is done by first representing the service
domain as a Stochastic Petri-Net [1], and then converting
the same to the equivalent CTMC representation. A detailed
description of the conversion of a normal representation of
the system to the equivalent CTMC representation is given
in [14].
The motive behind representing the service domain as
a CTMC is to take advantage of the various analysis proce-
dures meant for the latter, and in effect to come up with use-
ful results regarding the reliability of the system. The transi-
tion rates between states in the CTMC may be expressed in
the form of a matrix called the infinitesimal generator ma-
trix . The value of the ij
th
element of this matrix is equal
to the value of the rate of transition from the i
th
state to the
j
th
state of the CTMC. The sum of the elements in each row
of this matrix is always zero. Therefore the ii
th
element in
each row is the negative of the summation of the other ele-
ments in the row. The infinitesimal generator matrix for our
trip-planner example whose coupling values between ser-
vices and service completion rate values are shown in figure
3 is shown below in equation (5):
−2.01.01.0 0 0 0 0 0 0
0 −8.1 0 2.42.92.6 0 0 0.2
00−12.32.65.04.6 0 0 0.1
0 0 0 −5.75 0 0 1.93.80.05
0 0 0 0 −13.4 0 7.0 6.1 0.3
0 0 0 0 0 −5.38 2.23.10.08
0.8 0 0 0 0 0 −1.0 0 0.2
1.4 0 0 0 0 0 0 −1.70.3
00.70.50.009 0.002 1.10.06 0.7 −3.07
(5)
For example, the transition rate value from service BestHo-
domain as a Stochastic Petri-Net [10], and then converting the same to the equivalent
CTMC representation. A detailed description of the conversion of a normal representa-
tion of the system to the equivalent CTMC representation is given in [11].
The motive behind representing the service domain as a CTMC is to take advantage
of the various analysis procedures meant for the latter, and in effect to come up with
useful results regarding the reliability of the system. The transition rates between states
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
Log in/out
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
1.0 1.0
--
-- -- --
1.4 1.7
2.1 1.9
1.5
1.4
2.7
2.2
1.1
1.7
1.2
1.9
-- --
--
--
-- -- -- --
-- -- -- --
--
-- -- -- --
--
-- -- --
--
-- -- -- -- -- -- --
--
-- -- -- --
--
-- --
--
--
--
--
--
--
Log in/out
--
1.0
1.0
(a)
Failure rate Recovery rate
Completion rate
0.8
1.7
3.2
1.4
1.4
1.8
2.4
1.0
0.002
1.1
0.7
0.009
0.06
--
0.7
0.5
0.2
0.3
0.08
0.2
0.3
--
0.05
TravelPedia
FlightsCheap
EasyHotels
BestHotels
HoteloCity
PaymentGate
EasyPay
0.08
Log in/Log out
(b)
Fig. 3: (a) Coupling values, (b) Initial failure, recovery, and service completion rate
values
in the CTMC may be expressed in the form of a matrix called the infinitesimal generator
matrix . The value of the ij
th
element of this matrix is equal to the value of the rate of
transition from the i
th
state to the j
th
state of the CTMC. The sum of the elements in
each row of this matrix is always zero. Therefore the ii
th
element in each row is the
negative of the summation of the other elements in the row. The infinitesimal generator
matrix for our trip-planner example whose coupling values between services and service
completion rate values are shown in figure 3 is shown below in equation (6):
I GM =
−2.01.01.0 0 0 0 0 0 0
0 −8.02 0 2.38 2.89 2.55 0 0 0.2
00−12.32 2.64 5.04 4.56 0 0 0.08
0 0 0 −5.79 0 0 1.96 3.78 0.05
0 0 0 0 −13.42 0 7.04 6.08 0.3
0 0 0 0 0 −5.32.16 3.06 0.08
0.8 0 0 0 0 0 −1.0 0 0.2
1.4 0 0 0 0 0 0 −1.70.3
00.70.50.009 0.002 1.10.06 0.7 −3.071
(6)
For example, the transition rate value from service BestHotels to EasyPay is calculated
using equation (2) as follows (shown in bold in the matrix):
λ = C oupl ing
BestHotels−EasyP ay
∗ compl etionRate
BestHotels
=1.9 ∗ 3.2=6.08
The last column and row (9th from left and top) correspond to the fail state and its
elements are simply obtained from the table in figure 3(b) as the initial failure and
recovery rate values respectively.
A number of analysis techniques require that the transition values between the dif-
ferent states of a CTMC be expressed as a probability. To take advantage of these tech-
niques, an approximate transition probability matrix may be obtained from the infinites-
imal generator matrix, which is called the embedded Markov chain matrix. Each ij
th
element of this matrix may be obtained as the ratio of the corresponding element of the
infinitesimal generator matrix to the sum of all the elements except the ii
th
element in
the corresponding row of the infinitesimal generator matrix. The ii
th
element of this
matrix is always zero. The embedded Markov chain matrix P for our trip-planner ex-
ample corresponding to the infinitesimal generator matrix is shown below in equation
(7):
P =
00.50.5 0 0 0 0 0 0
0 0 0 0.297 0.36 0.318 0 0 0.025
0 0 0 0.214 0.409 0.37 0 0 0.007
0 0 0 0 0 0 0.339 0.653 0.008
0 0 0 0 0 0 0.525 0.453 0.022
0 0 0 0 0 0 0.408 0.577 0.015
0.8 0 0 0 0 0 0 0 0.2
0.824 0 0 0 0 0 0 0 0.176
00.228 0.163 0.003 0.001 0.357 0.02 0.228 0
(7)
For example, the element in the embedded Markov chain matrix corresponding to the
element in bold in the IGM is calculated as follows:
P =
6.08
7.04 + 6.08 + 0.3
=0.453
4 Calculating the reliability in terms of ‘failure distance’
The coupling between services is an expression of the bonding that exists between in-
teracting services in the domain. The higher the value of this coupling, more tightly
are the services bound to each other. In such a scenario, we feel that the ‘tendency to
fail’ of a service that is ‘called’ by another should be in some way dependent upon the
reliability of the calling service. Thus, a service that is tightly coupled with another
of low reliability should have a greater tendency to fail than one that is not as tightly
coupled and vice-versa. To capture this relationship, we propose the procedure of reg-
ularly revising the failure-rates of individual services according to equation (4). In this
equation, the failure-distance (which will be elaborated upon subsequently) of services
that call the service in question is in the denominator. Therefore, a calling service that
has a higher failure distance (i.e. better reliability) will tend to reduce the failure-rate
of the concerned service. Further, the coupling value is placed in the numerator so that
the effect is proportional to the degree of coupling. The revised values of failure-rate
are then used to calculate a new set of failure-distance values. This process is repeated
every time a new service request is made. This, thus caters to our higher level goal of
Figure 6: Embedded Markov Chain Matrix.
As an example, the element in the embedded
Markov chain matrix corresponding to the element in
bold in the IGM is calculated as follows:
P =
6.08
7.04 + 6.08 + 0.3
= 0.453
4 RELIABILITY IN TERMS OF
‘FAILURE DISTANCE’
The CTMC representation of the service domain is
utilized to calculate the reliability values. More pre-
cisely, the CTMC representation is used to find the
‘failure distance’ of individual services, and this fail-
ure distance is regarded as an expression of reliability.
The larger the failure distance of a service, the higher
is its reliability.
It would be worthwhile to mention at this point
that the failure distance of a service is measured as the
‘number of transitions’ that the system would need to
go through before converging to the ‘fail’ state, given
that it starts at the service in question. The larger the
number of transitions, the larger the failure distance.
This would be further elaborated upon, in the subse-
quent portion.
The CTMC representation of the service domain
which is used to calculate the failure distance includes
the infinitesimal generator matrix (shown in Figure 5
for our example) which consists of the transition rate
values between every pair of ‘invoking’ and ‘invoked’
services in the domain. Another important component
of the CTMC representation is the probability vector.
The elements in the probability vector correspond to
the various states of the CTMC representation. Each
element in the vector represents the probability that
the system exists in the corresponding state at a cer-
tain stage. Thus initially, when number of transitions,
t = 0, the probability vector may be represented as π
0
,
where
π
0
= {p
0
1
, p
0
2
, p
0
3
, . . . , p
0
n
} (5)
p
0
i
(i = 1, 2, . . . , n) are the values representing the
probability that the system initially is in state i. Fur-
thermore, after the first transition, t = 1,
π
1
= π
0
· P (6)
where P is the embedded Markov chain matrix
(shown in Figure 6 for our example). As mentioned
earlier, the embedded Markov chain matrix consists
of the transition probability values from each state
in the system to every other state. It is analogous
to the transition probability matrix of a discrete time
Markov chain (Norris, 1998).
Thus, if we continue multiplying the probability
vector with the embedded Markov chain matrix P,
we will eventually arrive at a probability vector, π
s
,
which remains constant, i.e. it does not change with
further multiplication with P.
π
1
= π
0
· P ⇒ π
2
= π
1
· P ⇒ ···π
s
= π
s
· P (7)
π
s
is called the equilibrium probability vector.
Each element in this vector represents the probabil-
ity of the system being in the corresponding state at
equilibrium.
We will now show that the equilibrium probabil-
ity vector is the same as the left-hand eigenvector of
matrix P corresponding to the unit eigenvalue (Greub,
1981). If e
T
i
is the left-hand eigenvector of a matrix
P corresponding to the eigenvalue λ
i
, then we know
that
λ
i
· e
T
i
= e
T
i
· P (8)
when λ
i
= 1, i.e. the unit eigenvalue, then
e
T
i
= e
T
i
· P (9)
Observing equations (7) and (9) together,
e
T
i
= e
T
i
· P ⇔ π
s
= π
s
· P ⇒ e
T
i
= π
s
The equilibrium probability vector may thus be eas-
ily calculated as the left hand eigenvector (normal-
ized to sum to 1) corresponding to the unit eigenvalue,
of the embedded Markov chain matrix of the CTMC
representation of any service domain. The equilib-
rium probability vector for our trip-planner example
is shown below:
WEBIST 2010 - 6th International Conference on Web Information Systems and Technologies
34

[0.2092, 0.1173, 0.1137, 0.0593, 0.0888, 0.0991, . . .
. . . 0.1083, 0.1488, 0.0555] (10)
Of the elements of this equilibrium probabil-
ity vector, the one corresponding to the ‘fail’ state
(shown in bold) of the CTMC representation, gives
the probability of the system being in the fail state at
equilibrium. If the probability of the system being in
the fail state at equilibrium is high, we may conclude
that the service that is far from equilibrium is also far
from the fail state, and vice-versa. Therefore, if we
somehow find a way of calculating the distance of a
service from equilibrium, it would also give us an es-
timate of its distance from failure. Thus the problem
of finding the distance of a service from failure may
be translated to that of finding the distance of the ser-
vice from equilibrium.
We utilize the method put forward by
William J. Stewart to calculate the distance of
the service from equilibrium at the various stages
of service selection (Stewart, 1991). The method is
explained as follows.
Let x
0
1
represent the probability vector that models
a system that has a 100% probability of being in state
1 initially when the number of transitions t = 0,
x
0
1
= {1, 0, 0, . . . , 0} (11)
similarly,
x
0
2
= {0, 1, 0, . . . , 0} (12)
and in general,
x
0
i
= {0, 0, 0, . . . , 0, 1, 0, . . . , 0} (13)
Let the left-hand eigenvectors of matrix P be
{e
T
1
, e
T
2
, . . . , e
T
n
}
corresponding respectively to the eigenvalues,
{λ
1
, λ
2
, . . . , λ
n
}
Since x
0
i
in equation (13) is a row vector, it may be
expressed as a linear combination of other row vec-
tors. Thus,
x
0
i
= c
i1
· e
T
1
+ c
i2
· e
T
2
+ . . . + c
in
· e
T
n
(14)
where c
i j
( j = 1, 2, . . . , n) are currently unknown con-
stants whose values and significance will subse-
quently be discussed.
Just like π
1
was computed in equation (6), x
1
i
which is the probability vector after the first transi-
tion t = 1 given that the system starts (at t = 0) with
a 100% probability of being in state i, may also be
computed as,
equation (6): π
1
= π
0
· P ⇒ x
1
i
= x
0
i
· P
Thus, from equation (14), it follows that,
x
1
i
= x
0
i
· P = c
i1
· e
T
1
· P + c
i2
· e
T
2
· P + . . . + c
in
· e
T
n
· P
(15)
Using equation (8): λ
i
· e
T
i
= e
T
i
· P, we get,
x
1
i
= c
i1
· λ
1
· e
T
1
+ c
i2
· λ
2
· e
T
2
+ . . . + c
in
· λ
n
· e
T
n
(16)
Similarly, we may get x
2
i
as,
x
2
i
= x
1
i
· P
= c
i1
· λ
1
· e
T
1
· P + c
i2
· λ
2
· e
T
2
· P + . . . + c
in
· λ
n
· e
T
n
· P
= c
i1
· λ
2
1
· e
T
1
+ c
i2
· λ
2
2
· e
T
2
+ . . . + c
in
· λ
2
n
· e
T
n
Thus, after a certain number of transitions, the
vector x
i
will eventually converge to the equilibrium
probability vector. Say after k steps,
x
k
i
= c
i1
· λ
k
1
· e
T
1
+ c
i2
· λ
k
2
· e
T
2
+ . . . + c
in
· λ
k
n
· e
T
n
(17)
Now similarly, let x
0
j
represent the probability vector
such that the system is 100% surely in state j initially
when the number of transitions t = 0. Thus,
x
0
j
= {0, 0, 0, . . . , 0, 1, 0, . . . , 0}
Just like x
0
i
in equation (14), x
0
j
may also be expressed
as a linear combination of the left hand eigenvectors
of P,
x
0
j
= c
j1
· e
T
1
+ c
j2
· e
T
2
+ . . . + c
jn
· e
T
n
Similarly,
x
1
j
= c
j1
· e
T
1
· P + c
j2
· e
T
2
· P + . . . + c
jn
· e
T
n
· P
= c
j1
· λ
1
· e
T
1
+ c
j2
· λ
2
· e
T
2
+ . . . + c
jn
· λ
n
· e
T
n
and after k steps,
x
k
j
= c
j1
·λ
k
1
·e
T
1
+c
j2
·λ
k
2
·e
T
2
+. . . + c
jn
·λ
k
n
·e
T
n
(18)
Observing equations (17) and (18) together, the only
difference between the two equations are the con-
stants c
il
, and c
jl
where l = 1, 2, . . . , n. In other words,
the difference in the state of the system after k tran-
sition steps, when the starting state was state i, and
when the starting state was state j, is represented by
the difference in the values of the constants c
il
, and
c
jl
, where l = 1, 2, . . . , n. The values of c
il
, and c
jl
,
(l = 1, 2, . . . , n) therefore hold the key to finding the
difference in the distance (in terms of number of tran-
sition steps) of state i, and state j from any other state
of the system. Thus, these constants would also re-
flect the difference in distance of the two states from
the equilibrium state.
To calculate the values of c
1l
, c
2l
, c
3l
, . . . , c
nl
,
where l = 1, 2, . . . , n, we make the following obser-
vations. We know that,
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL SERVICE RELIABILITY IN A COMPOSITION
SCENARIO
35

x
0
1
= {1, 0, 0, . . . , 0}
x
0
2
= {0, 1, 0, . . . , 0}
.
.
.
x
0
n
= {0, 0, 0, . . . , 1}
Writing this in matrix form,
X =
1 0 0 . . . 0
0 1 0 . . . 0
0 0 1 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 . . . 1
= Identity Matrix (19)
We also know that,
x
0
1
= c
11
· e
T
1
+ c
12
· e
T
2
+ . . . + c
1n
· e
T
n
x
0
2
= c
21
· e
T
1
+ c
22
· e
T
2
+ . . . + c
2n
· e
T
n
.
.
.
x
0
n
= c
n1
· e
T
1
+ c
n2
· e
T
2
+ . . . + c
nn
· e
T
n
Writing this in matrix form as well,
x
0
1
x
0
2
x
0
3
.
.
.
x
0
n
=
c
11
c
12
c
13
. . . c
1n
c
21
c
22
c
23
. . . c
2n
c
31
c
32
c
33
. . . c
3n
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
n1
c
n2
c
n3
. . . c
nn
e
T
1
e
T
2
e
T
3
.
.
.
e
T
n
(20)
Therefore,
X = CE
T
From equation (19), we know that X is the identity
matrix (I), therefore,
I = CE
T
⇒ C =
I
E
T
= (E
T
)
−1
(E
T
)
−1
is the matrix of the right-hand eigenvectors
of matrix P. The values of the constants c
i j
, which
are capable of determining the distance of the various
states from equilibrium, can thus be easily computed
as the right-hand eigenvectors of matrix P. Of these
right-hand eigenvectors, the sub-dominant eigenvec-
tor gives the best estimate of the distance of each state
from equilibrium (Stewart, 1991). The sub-dominant
eigenvector for our trip-planner example is shown be-
low:
[0.3749, 0.3566, 0.3606, 0.3513, 0.3435, 0.3476, . . .
. . . 0.3352, 0.3420, 0.1038] (21)
Translating these results to the service domain, we
are in a position to calculate via the CTMC represen-
tation of the domain, the ‘distance’ of each service
from equilibrium.
The important point here, however, is that the dis-
tance that needs to be calculated is the failure distance
and not necessarily the equilibrium distance. A clear
understanding on the relationship between the failure
state and the equilibrium state needs to be established.
We will attempt to do this through a simple example.
Suppose, the failure probability at equilibrium is
very high (say 0.9). This means that the probability
that the system at equilibrium is in the fail state is
0.9. This would be represented by the element corre-
sponding to the fail state in the equilibrium probabil-
ity vector π
s
of equation (7). In such a scenario, the
larger the distance of a service from equilibrium, the
larger the failure distance and hence higher its reli-
ability. Conversely, suppose the failure probability at
equilibrium is a small value (e.g. 0.2). In this case, the
smaller the distance of a service from the equilibrium,
higher its reliability. In general, if the failure probabil-
ity at equilibrium is greater than 0.5, a larger distance
from equilibrium reflects higher reliability and vice-
versa for a failure probability smaller than 0.5. The
failure distance of a service may be calculated using
the formula in equation (22).
Failure Distance =
1
λ
i→Fail
∗ c
10·(0.5−π
s
(Fail))
i2
(22)
c
i2
is the magnitude of the i
th
element of the
subdominant right-hand eigenvector of the embed-
ded Markov chain matrix (P) of the CTMC repre-
sentation of the service domain. The magnitude of
the sub-dominant eigenvector gives the best estimate
of the distance of the i
th
state from equilibrium, as
mentioned earlier (Stewart, 1991). The larger the
value of c
i2
, the larger the distance of the i
th
state
from equilibrium. Therefore in equation (22), as long
as the failure probability is less than 0.5, the fac-
tor c
10·(0.5−π
s
(Fail)
i2
is in the denominator of the ex-
pression (since (0.5 − π
s
(Fail)) would be a positive
value). Thus, a larger value of c
i2
(which expresses a
larger distance from equilibrium) results in a smaller
value of failure distance. Also, the smaller the value
of π
s
(Fail), the higher the power to which the c
i2
gets
raised and hence the failure distance becomes smaller.
The opposite holds whenever π
s
(Fail) is greater than
0.5. When the failure probability at equilibrium is
exacly 0.5, the factor c
10·(0.5−π
s
(Fail)
i2
becomes equal
to 1 and the failure distance would depend only on
the current value of the factor λ
i→Fail
. The fail-
ure distance values calculated for the services in our
trip-planner example are: TravelPedia → 489.24 ;
FlightsCheap → 1163.94 ; EasyHotels → 2091.66
; BestHotels → 385.19 ; HoteloCity → 1370.28 ;
PaymentGate → 644.16 ; and EasyPay → 392.76 .
WEBIST 2010 - 6th International Conference on Web Information Systems and Technologies
36

The calculation of failure-distance for BestHotels is
shown below:
Failure Distance
BestHotels
=
1
0.3 ∗ 0.3435
10·(0.5−0.0555)
= 385.19
The failure distance values so calculated take into
account the interactions between the services. This is
achieved owing to the fact that the transition rate val-
ues between the services in the CTMC representation
have been considered in the calculation.
5 EXPERIMENTAL VALIDATION
In this section, we attempt to experimentally validate
the technique proposed in this paper to calculate the
individual reliabilities of services in a domain taking
into account the influence of interacting services. To
do this, experiments were conducted on a service do-
main with 29 services (excluding the first and the last)
spread over 6 levels of functionality. Seven different
sets of initial fail-rate and coupling values were ex-
perimented with. The experimental domain is shown
in Figure 7.
1
43 52 6
8 9 107
31
12 13 1411
1716 1815 19
22 23 2421 2520
2827 2926 30
Level 1
Level 2
Level 3
Level 4
Level 5
Level 6
Figure 7: Service domain used in the experiments.
Simulations were run on the experimental domain,
wherein services were allowed to fail randomly at
their respective fail-rate values. 10, 000 simulation
runs were conducted, where each run comprised a
failure being forced at each functionality level. Ev-
ery time that a service failed, its own fail-rate was
increased marginally (we could have recomputed the
fail-rate value following equation (3) with the same
effect; in the interest of simplicity we increased the
fail-rate marginally), and so was the fail-rate of the
services in the functionality level immediately above
it. The increase in fail-rate of the parent services was
proportional to the value of coupling between them
and the failing service. Therefore, a service that had
a stronger coupling with the failing service suffered a
larger increase in its fail rate. This was done in con-
formance with the general belief that the reliability
value of a service influences the reliability of the in-
teracting services, particularly the ones that invoke it.
A number of simulation scenarios were observed.
However, only the two main ones have been discussed
here. The first simulation scenario was the static sce-
nario, wherein services were allowed to fail, their fail-
rates on failing were increased, and they were allowed
to fail again. The fail-rate of services were allowed to
rise indefinitely. The second scenario was a more dy-
namic scenario, wherein services were allowed to fail,
and their fail-rates were increased on failing as in the
static case. However, once the fail-rate of a service
exceeded a certain maximum, the service was taken-
out for ‘repair’ and brought in after a few runs with
its fail-rate reinstated to its original value.
The motive behind this simulation exercise was
to get an idea of the possible system behaviour if it
were observed for a very long period of time (one in
which 10, 000 failures occurred at each functionality
level). The number of failures for each service re-
turned by the simulation formed the basis for the val-
idation of our proposed technique against the existing
techniques for reliability assessment in an interactive
environment.
The proposed technique, described in previous
sections, involved the representation of the service
domain in its equivalent CTMC form, putting together
the ‘infinitesimal generator matrix’ (shown in Figure
5 for the trip-planner example) of this CTMC, calcu-
lating the ‘embedded Markov chain matrix’ (shown
in Figure 6 for the trip-planner example), and subse-
quently finding the left-hand eigenvector (correspond-
ing to the unit eigenvalue) which is the equilibrium
probability vector of the system (shown in equation
(10)) and the subdominant right-hand eigenvector of
this matrix. Finally the equilibrium probability vec-
tor and the subdominant right-hand eigenvector were
used to calculate the ‘failure distance’ of each service
in the domain using equation (22). The service se-
lected at each functionality level was the one with the
largest value of failure distance at that level. This ser-
vice was considered to be furthest from the ‘fail’ state
and thus the most reliable.
The existing techniques as discussed in the ‘re-
lated work’ section (section 2) were varied. However,
in terms of calculating the individual reliabilities of
services, all of them were similar in that they all cal-
culated the individual reliabilities of the services in
isolation. That is to say that they assume that the reli-
abilities of individual services in the domain would be
unaffected by their interaction with other services in
the domain. Therefore, to replicate the existing tech-
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL SERVICE RELIABILITY IN A COMPOSITION
SCENARIO
37
niques in this domain, the initial fail-rate values of the
services were utilized, and at each level the service
which had the smallest fail-rate value at that level was
selected.
Static scenario
Static scenario
Static scenario
Static scenario
Static scenario
Existing techniques
Existing techniques
Proposed technique
Proposed technique
Failures
Reliability
Failures
Reliability
Domain 1
6,050/10,000
39.5%
1,408/10,000
85.92%
Domain 2
8,765/10,000
12.35%
712/10,000
92.88%
Domain 3
9,008/10,000
9.92%
16/10,000
99.84%
Domain 4
9,844/10,000
1.56%
526/10,000
94.74%
Domain 5
9,778/10,000
2.22%
521/10,000
94.79%
Domain 6
6,490/10,000
35.1%
4,236/10,000
57.64%
Domain 7
9,983/10,000
1.7%
170/10,000
98.3%
Monday, July 13, 2009
Figure 8: Results of experiments in a static scenario (no
repair of services).
Dynamic scenario (repair time: 1 iteration)
Dynamic scenario (repair time: 1 iteration)
Dynamic scenario (repair time: 1 iteration)
Dynamic scenario (repair time: 1 iteration)
Dynamic scenario (repair time: 1 iteration)
Existing techniques
Existing techniques
Proposed technique
Proposed technique
Failures
Reliability
Failures
Reliability
Domain 1
8,231/10,000
17.69%
100/10,000
99%
Domain 2
1,168/10,000
88.32%
244/10,000
97.56%
Domain 3
1,969/10,000
80.31%
157/10,000
98.43%
Domain 4
1,420/10,000
85.8%
161/10,000
98.39%
Domain 5
3,705/10,000
62.95%
669/10,000
99.31%
Domain 6
688/10,000
93.12%
181/10,000
98.19%
Domain 7
7,199/10,000
28.01%
4,492/10,000
55.08%
Monday, July 13, 2009
Figure 9: Results of experiments in a dynamic scenario
(with repair of services).
The sequence followed in the experiments for the
static scenario is now described. The proposed tech-
nique and existing techniques were first applied on the
experimental domain. These gave the set of services
selected at each level. The simulation, was next run
for 10, 000 iterations each. Each iteration comprised
the occurrence of 1 failure at each functionality level.
The failing services on each iteration were compared
with the services selected by the two techniques (pro-
posed and existing). If any of the selected services by
a selection technique happened to fail in an iteration
of the simulation, the selected technique was said to
have failed in that iteration. In other words, a selec-
tion was said to be a success on a particular iteration if
and only if none of the services selected (at any level)
was one of the failing services in the iteration.
The experimental procedure for the dynamic sce-
nario was similar with the only difference being that
the selection techniques (both proposed and existing)
were applied after every simulation run rather than
only once in the beginning. This was because, with
services being taken out for repair, the complexion of
the domain was possibly changing on every run.
Subsequently the reliability of the composite ap-
plication selected by either selection technique was
calculated as shown in equation (23).
Reliability =
total no. of iterations − total no. of failures
total no. of iterations
(23)
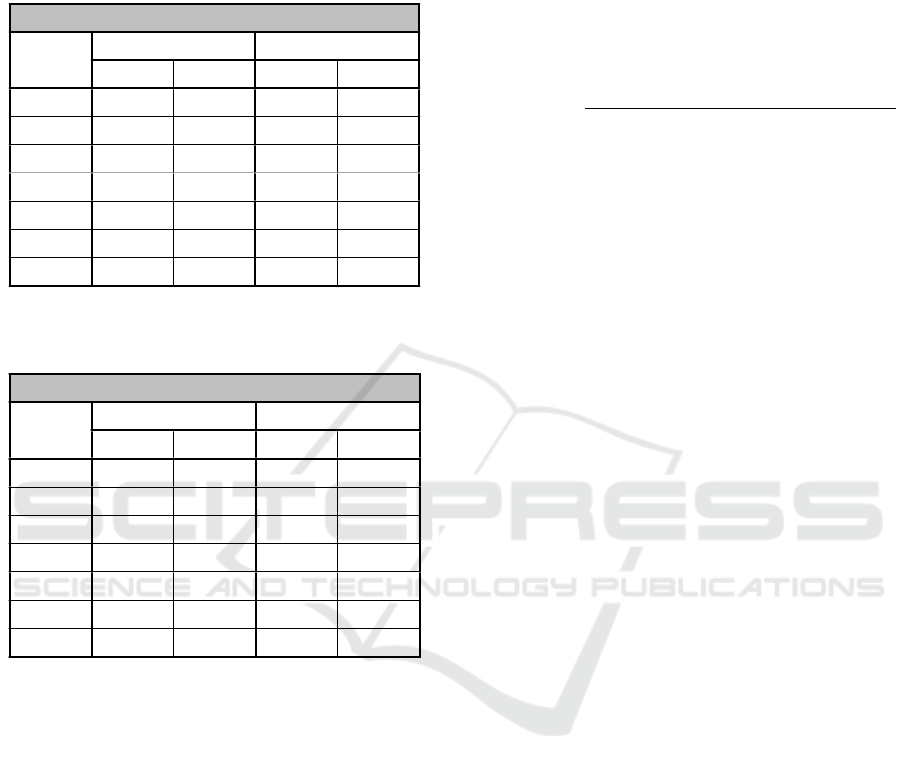
The results for the two scenarios have been shown
in the tables in Figures 8, and 9. The results show
that in both cases, the proposed technique outperform
the existing techniques. The results therefore indicate
that the proposed technique does manage to compose
a more reliable application in a scenario where the
service components are interacting with each other
and the reliability of a service that invokes another
is affected by that of the one invoked.
6 CONCLUSIONS
The technique proposed in this paper is significant in
the following respects: a) It focuses on reliability as a
central factor in service selection that aligns well with
the concerns of most customers. b) The reliability of
individual services is calculated taking into account
the interaction of the service with others in the domain
which is the novel feature in this technique.
There is however, substantial scope for future
work. The model presented in this paper is, in fact,
still incomplete as it only takes into consideration the
reliability of the prospective services. A number of
crucial factors influencing service selection in a com-
position scenario are yet to be incorporated in this
model. These include, analysis of how the prospective
services compare in terms of the customer perception
of the QoS attributes, how factors such as ‘improve-
ment trends’ of the services on offer could affect their
respective selection potential, the impact that the av-
erage waiting time of a service would have on its po-
tential as a prospective service etc.
REFERENCES
Balbo, G. (2002). Introducation to stochastic petri nets. In
Lectures on formal methods and performance analy-
sis: first EEF/Euro summer school on trends in com-
puter science, pages 84–155.
Battilani, P. and Fauri, F. (2007). The rise of a service-based
economy and its transformation: the case of rimini. In
WEBIST 2010 - 6th International Conference on Web Information Systems and Technologies
38

Rimini Centre for Economic Analysis, Working Paper
Series.
Epifani, I., Ghezzi, C., and Mirandola, R. (2009). Model
evolution by run-time parameter adaptation. In Pro-
ceedings of the International Conference on Software
Engineering.
Greub, W. H. (1981). Linear Algebra. Springer.
Kilburn, J. (2003). The decline of the mills and the rise of
social services in a northeastern mill town. In Annual
meeting of the American Sociological Association.
Kokash, N. (2005). Web service dicovery with implicit qos
filtering. In Proceedings of the IBM PhD Student Sym-
posium, in conjunction with the International Confer-
ence on Service Oriented Computing (ICSOC), pages
61–66.
Norris, J. R. (1998). Markov Chains. Cambridge University
Press.
Papazoglou, M. P. (2003). Service-oriented computing:
Concepts, characteristics and directions. In Proceed-
ings of the Fourth International Conference on Web
Information Systems Engineering, pages 3–12.
Ran, S. (2003). A model for web services discovery with
qos. In ACM SIGecom Exchanges, pages 1–10.
Stewart, W. J. (1991). Introduction to the numerical solu-
tion of markov chains. CRC press.
Tsai, W., Zhang, D., Chen, Y., Huang, H., Paul, R., and
Liao, N. (2004). A software reliability model for web
services. In Proceedings on Software Engineering and
Applications (SEA).
Wang, W.-L., Wu, Y., and Chen, M.-H. (2003). An
architecture-based software reliability model. In
Proceedings of the 12th international conference on
World Wide Web.
Yu, T. and Lin, K.-J. (2004). Service selection algorithms
for web services with end-to-end qos constraints. In
Proceedings of the International Conference on e-
Commerce Technology.
Zeng, L., Benatallah, B., Dumas, M., Kalagnanam, J., and
Sheng, Q. Z. (2003). Quality driven web services
composition. In Proceedings of the 12th international
conference on World Wide Web.
Zhovtobryukh, D. (2007). A petri net-based approach for
automated goal-driven web service composition. In
Society for Computer Simulation International, vol-
ume 83, pages 33–63.
THE INFLUENCE OF SERVICE INTERACTIONS ON INDIVIDUAL SERVICE RELIABILITY IN A COMPOSITION
SCENARIO
39
