
MULTI-OBJECT TRACKING BASED ON SOFT ASSIGNMENT OF
DETECTION RESPONSES
Sami Huttunen and Janne Heikkilä
Machine Vision Group, Department of Electrical and Information Engineering, University of Oulu
P.O. Box 4500, FIN-90014, Oulu, Finland
Keywords:
Multi-object tracking, Kalman filter, Data association.
Abstract:
We introduce a new detection-based method that is able to track multiple objects from a single camera. The
method is built upon an approach that combines Kalman filtering and the Expectation Maximization (EM)
algorithm. The benefit of this approach is that soft assignment of the detections to corresponding objects can
be performed automatically using their a posteriori probabilities. This is a general approach for detection-
based multi-object tracking, and there are various ways to detect the objects. In this paper, we demonstrate the
applicability of the approach for tracking multiple pedestrians and faces using a basic cascade detector.
1 INTRODUCTION
Tracking is an essential part of current computer vi-
sion applications. Especially many modern visual
surveillance and human computer interaction systems
rely on reliable multi-object tracking. In principle
tracking over time involves matching objects in con-
secutive frames using features such as points, lines or
blobs. One difficulty in the application of multi-object
tracking involves the problem of getting reliable ob-
servations and associating them with the appropriate
objects. The association process would be simple if
there were only one measurement for each object, but
in order to get reliable information about the position,
the number of observations has to be larger.
One approach to address the limitation of getting
reliable measurements is to combine tracking with de-
tection. Previously detection has been used to initial-
ize new objects or detectors are applied only to se-
lected frames. Between the detections tracking has
been carried out, for example, by a method based
on color or texture features. Due to increased com-
putational power, it is nowadays possible to use de-
tectors for every frame instead of just some frames.
Therefore the approaches using detector responses di-
rectly as observations for tracking are gaining more
and more attention.
Since a typical object detector (Viola and Jones,
2001) is insensitive to small changes in translation
and scale, multiple detection responses will usually
occur around each object in a scanned image, and typ-
ically it often makes sense to return one final detection
per object. To obtain this kind of result, it is there-
fore useful to post process the detected sub-windows
in order to combine overlapping detections into a sin-
gle detection. However, it is unclear how fusing mul-
tiple overlapping detections to yield the final object
detections should be performed. Unfortunately it is
also difficult to distinguish the false positives using
the post processing, and in some cases a detector can
also output inaccurate responses. The output of the
detector can be thought of as a series of noisy mea-
surements, and therefore our approach uses the orig-
inal detector responses as a set of measurements and
assigns them to the objects currently tracked. In that
way we can leave out the problematic post processing
entirely and at the same time get a number of mea-
surements for tracking.
We present a novel method, which utilizes soft as-
signment to associate the detection responses to the
objects tracked. Due to soft assignment it is able to
cope with inaccurate responses and inter-object oc-
clusions. The method includes a component which
combines the Kalman filtering algorithm (Kalman,
1960) and the expectation maximization (EM) algo-
rithm (Dempster et al., 1977) to estimate the parame-
ters of the objects tracked and to assign the measure-
ments softly. One of the benefits of this approach is
also that neither iterations nor long measurement his-
tory are needed. The basic idea of the Kalman-EM al-
gorithm was originally presented by Hannuksela et al.
(2007) and later it was used for multi-object tracking
296
Huttunen S. and Heikkilä J. (2010).
MULTI-OBJECT TRACKING BASED ON SOFT ASSIGNMENT OF DETECTION RESPONSES.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 296-301
DOI: 10.5220/0002820602960301
Copyright
c
SciTePress

for the first time (Huttunen and Heikkilä, 2008). Here
we extend the previous work (Huttunen and Heikkilä,
2008), and propose a new method for tracking multi-
ple objects from image sequences using detector re-
sponses as measurements. This makes it possible to
initiate new objects, as well as terminate tracks that
are no longer valid. In addition, the proposed method
is able to adjust the scale of the objects tracked. The
method presented by Huttunen and Heikkilä (2008)
does not provide any of these capabilities.
One of the benefits of detector based tracking is
that it enables to track only the objects of interesting
category, for instance, humans or their faces. Another
advantage is that we are not required to use a static
camera as is the case with multi-object tracking
methods relying on background subtraction.
Related Work. The Kalman filter (Kalman, 1960) is
widely used in the context of tracking with noisy mea-
surements and data association. In multiple hypoth-
esis tracking (MHT) algorithm (Reid, 1979), target
states are estimated from data-association hypotheses
using the Kalman filter. For each measurement, prob-
abilities are calculated for hypotheses that the mea-
surement came either from previously known targets
or from a new target. The MHT algorithm is computa-
tionally exponential both in memory and time. Later
Joo and Chellappa (2007) have proposed an improved
algorithm based on MHT. Another classical approach
for data association is Joint Probabilistic Data Associ-
ation Filter (JPDAF) (Fortmann et al., 1983), in which
joint posterior association probabilities are computed
for multiple targets or multiple discrete interfering
sources in Poisson clutter. The major limitation of
the JPDAF algorithm is its inability to initialize new
objects entering the scene and to deal with objects ex-
iting the scene.
There exists a wide variety of detection meth-
ods. At one end of the spectrum are part-based de-
tectors (Mikolajczyk et al., 2004; Wu and Nevatia,
2005), which represent an object as an assembly of
distinct parts. At the other end are detection methods
(Gavrila, 2000; Viola and Jones, 2001) that try to find
a specific object as a whole.
One way of integrating detection and tracking is
to link detection responses in consecutive frames.
Huang et al. (2008) present a detection-based three-
level hierarchical association approach. The more re-
cent work by Singh et al. (2008) introduces a two-
stage multi-object tracking approach using a pedes-
trian detector and association of track segments.
Leibe et al. (2007) have introduced an approach which
considers object detection and space-time trajectory
estimation as a coupled optimization problem.
When comparing the aforementioned methods
(Huang et al., 2008; Leibe et al., 2007; Singh et al.,
2008) with our work, the biggest difference is that
we associate the detector responses to objects with-
out utilizing trajectory history. This means we do not
need iterations or long measurement history in order
to track the objects. In addition, the tracking algo-
rithm presented in this paper is not dependent on a
specific object detector or object category. Later in
Section 3 we demonstrate the applicability of the ap-
proach for tracking multiple pedestrians and faces us-
ing a basic cascade detector.
The rest of the paper is organized as follows. Sec-
tion 2 describes the tracking algorithm in detail, and
experimental results are reported in Section 3. Fi-
nally, Section 4 concludes the paper.
2 TRACKING ALGORITHM
Our multi-object tracking method is based on soft as-
signment of detector responses. For every frame, first
an object detector is applied and the resulting output
is passed to the actual tracking algorithm. If there are
responses that are not assigned to any object, possi-
bly new objects are initialized. On the other hand, if
an object does not get any measurements it might be
necessary to end tracking it.
2.1 Object Detection
The object detector used in this work is built on the
cascade system proposed by Viola and Jones (2001)
and improved by Lienhart and Maydt (2002). Like
any other detectors based on a binary object/non-
object classifier, the detector scans the image with a
detection window at all positions and scales, running
the classifier in each window and yielding multiple
overlapping detections.
It is worth noting that the tracking algorithm pre-
sented in this paper is not bound up with any specific
detector. The only requirement the object detector
used has to meet is that it must be able to output the
bounding boxes of the objects in a single frame.
2.2 Kalman-EM Algorithm
In order to track multiple objects we are using a
method, which utilizes soft assignment to associate
the detection responses to the corresponding ob-
jects. The method embeds the EM algorithm into the
Kalman filtering algorithm to estimate the parameters
of the objects tracked.
MULTI-OBJECT TRACKING BASED ON SOFT ASSIGNMENT OF DETECTION RESPONSES
297

System model. We assume that each object
j = 1, . . . , M is represented by a vector x
j
=
[s
j
, u
j
, t
j
, v
j
]
T
of four state variables which contain
information about the object’s position (s
j
, t
j
) and
velocity (u
j
, v
j
) in the X and Y directions respec-
tively. It should be noted that the dimensions of the
object are not included in the state model and are
therefore updated separately as shown later. Since the
object tracked is represented as a point, then only a
translational model can be used, and the state-space
model of the object j can therefore be formulated as
x
j
(k) = Φx
j
(k − 1) + Γε
j
(k − 1), (1)
where x
j
(k) denotes the state of the object j at time
step k, and Φ =
1 1 0 0
0 1 0 0
0 0 1 1
0 0 0 1
, Γ =
0.5 0
1 0
0 0.5
0 1
are the the
state transition and disturbance matrices respectively.
Finally, ε
j
(k) is the process noise term, which is
assumed to be zero-mean white Gaussian noise with
a 2 × 2 covariance matrix Q
j
= σ
2
j
I.
Measurement Model. Let us denote a detection re-
sponse by r
i
= [r
x
i
,r
y
i
,r
w
i
,r
h
i
]
T
, in which (r
x
i
,r
y
i
) are
the pixel coordinates of the center of the bounding
box, and (r
w
i
,r
h
i
) are the dimensions. The observa-
tion i of the position l
i
= [r
x
i
,r
y
i
]
T
is assumed to fol-
low the measurement model
l
i
(k) = H
X
M
j=1
λ
i,j
x
j
(k) + η
i
(k), (2)
where M is the number of objects being tracked,
H = [
1 0 0 0
0 0 1 0
] is the measurement matrix, and λ
i,j
is
a hidden binary assignment variable which indicates
the object that generated the measurement. η
i
(k)
is the observation noise, which is assumed to obey
zero-mean Gaussian distribution with a covariance
matrix R. In addition, the process noise ε
j
(k)
and the observation noise η
i
(k) are assumed to be
independent of each other.
Soft Assignment. It follows from equations (1) and
(2) that the observations {l
i
}
N
i=1
form a set of 2-D
points that follow a dynamically evolving Gaussian
mixture model where the mean values of the com-
ponents change during the course of time. Were the
values of the binary assignment variables λ
i,j
known
beforehand, it would be possible to accomplish state
estimation simply by using M ordinary Kalman fil-
ters independently. Since this information is not
available in general, we are compelled to estimate
the assignments as well. For this purpose, we use
an algorithm (Hannuksela et al., 2007; Huttunen and
Heikkilä, 2008), which efficiently combines Kalman
filtering and the EM algorithm. It has been shown ex-
perimentally that the algorithm converges to the mean
values of the mixture components. A detailed descrip-
tion of the above-mentioned algorithm is given in Al-
gorithm 1.
When applying the algorithm, the basic assump-
tion is that there are M distributions corresponding
to different objects, and the location measurements
{l
i
}
N
i=1
are originating from them. Having the previ-
ous estimate of distribution parameters, we can eval-
uate a posteriori probabilities of the measurements to
obtain the soft assignments w
i,j
∈ [0, 1]. In this work,
the predicted estimates of x
j
(k) and P
j
(k) in con-
junction with a priori probabilities π
j
(k) of associ-
ating observations to the objects are used to compute
soft assignments w
i,j
using the Bayesian formulation.
It can be seen that this part corresponds to the ”E step”
of the EM algorithm.
Soft assignments are then used in computation of
the Kalman gains K
j
(k) which are needed to get the
filtered estimates of x
j
(k). Traditionally one way of
thinking about the weighting by K
j
(k) is that as the
measurement error covariance R approaches zero,
the actual measurement is trusted more, while the
predicted measurement is trusted less. On the other
hand, as the a priori estimate error covariance P
−
j
(k)
approaches zero the actual measurement will have
smaller effect on the estimate, while the predicted
measurement is given more weight. However, in our
approach we have multiple measurements instead
of a single measurement and therefore we have to
estimate the uncertainties for each of them. The
principle is that the covariance matrix R
i,j
, which
represents the uncertainty of one measurement, is in-
versely proportional to w
i,j
, and directly proportional
to R. The small constant δ has the effect that the
measurements not belonging to any objects, in other
words, outliers, get very small weights and large
uncertainty values and are therefore discarded. This
part corresponds to the ”M step” of the EM algorithm.
Implementation Details. In the actual implementa-
tion of the filter, the measurement noise covariance is
usually measured prior to operation of the filter. Esti-
mating the measurement error covariance is possible
because we should usually be able to take some off-
line sample measurements in order to determine the
variance of the measurement noise.
When using detector responses as measurements
the system noise characteristics are not exactly
known. If too much emphasis were given to the dy-
namical model, the estimation would ignore the in-
formation from new measurements. It is even possi-
ble that this can lead to filtering instability and diver-
gence. This can happen, for example, when an object
is at the same position for a very long time. In order
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
298

Algorithm 1: The combined Kalman filter and EM algorithm to estimate state using the given model.
Step 1. Predict estimate
ˆ
x
−
j
(k) by applying dynamics (1)
ˆx
−
j
(k) = Φˆx
+
j
(k − 1) (3)
and predict error covariance P
−
j
(k)
P
−
j
(k) = ΦP
+
j
(k − 1)Φ
T
f + ΓQ
j
Γ
T
, f > 1. (4)
Step 2. Compute the weights w
i,j
for each position estimate l
i
using a
Bayesian formulation. Let π
j
(k) > 0 be the a priori probability of asso-
ciating a measurement with the object j
P
j
π
j
(k) = 1
. The weight
w
i,j
is the a posteriori probability given by
P
j
w
i,j
= 1
w
i,j
∝ p
l
i
| µ
j
(k), C
j
(k)
π
j
(k − 1), (5)
where the likelihood function p(·) is a Gaussian pdf, with mean
µ
j
(k) = Hˆx
−
j
(k), (6)
and covariance
C
j
(k) = HP
−
j
(k)H
T
+ R. (7)
Step 3. Use the weights w
i,j
to set the observation noise covariance matri-
ces in (2) according to
R
i,j
= R(w
i,j
+ δ)
−1
, (8)
where δ is a small positive constant to prevent a division by zero. Compute
the Kalman gain
K
j
(k) = P
−
j
(k)O
T
OP
−
j
(k)O
T
+ R
j
−1
, (9)
where R
j
is a block diagonal matrix composed of R
i,j
, and O =
[HH · · · H]
T
is the corresponding 2N × 4 observation matrix. Note
that if w
i,j
has a small value, the corresponding measurement is effectively
discarded by this formulation.
Step 4. Compute filtered estimates of the state
ˆx
+
j
(k) = ˆx
−
j
(k) + K
j
(k)
z(k) − Ox
−
j
(k)
(10)
and compute the associated error covariance matrix
P
+
j
(k) =
I − K
j
(k)O
P
−
j
(k), (11)
where z(k) = [l
1
(k)
T
, l
2
(k)
T
, . . . , l
N
(k)
T
]
T
.
Step 5. Update a priori probabilities for assignments with a recursive filter
π
j
(k) = aπ
j
(k − 1) + (1 − a)
1
N
X
N
i=1
w
i,j
, (12)
where a < 1 is a learning rate constant.
to alleviate the aforementioned problem it is wise to
introduce a constant fading factor f into the proposed
filtering solution (4) to keep it stable.
2.3 Multi-Object Tracking
Using detector responses as measurements makes it
possible to initiate new objects, as well as terminate
tracks that are no longer valid. In addition, the
proposed method is able to adjust the scale of the
objects tracked unlike the previous method (Huttunen
and Heikkilä, 2008).
Object Initialization. When there exist a number
of detections which are not assigned to any objects
tracked, it is very likely that there is at least one new
object in the image. Detector responses that are left
unassigned and are overlapping with each other form
the bounding box of a new object candidate. In the
current implementation detections are combined in a
very simple fashion. The set of unassigned detections
is first partitioned into disjoint subsets. Two detec-
tions are in the same subset if their bounding regions
overlap. Each partition yields a single final detection.
A new object is created only if number of detections
in the subset is greater than a predetermined thresh-
old. Dimensions of the new object are selected as
the average of each of the corners of all detections in
the overlapping set. A new object cannot be entirely
initiated from a single measurement since it does not
provide velocity information, and also false detector
responses may cause problems. Therefore we are
using several frames in order to initialize an entirely
new object.
Object Scale. Since the original method (Huttunen
and Heikkilä, 2008) is based on color features, it does
not provide any means to update the dimensions of
the objects tracked. In this work, we are using detec-
tor responses and are able to update the dimensions
d
w
j
, d
h
j
using the formula
d
{w,h}
j
(k) = a·d
{w,h}
j
(k−1)+(1−a)
N
X
i=1
w
i,j
·r
{w,h}
i
(13)
where the weights w
i,j
are given by (5), and a is the
learning rate used in (12).
Track Termination. When an object under tracking
goes out of the camera view, the tracking algorithm
must have a way to detect it and remove the object. In
our method, the criteria for terminating a trajectory
is as follows. If no measurements are assigned to
an object j within a certain time, i.e.∀w
i,j
= 0, the
object is considered to be lost and is therefore deleted.
Occlusion Handling. There are two kinds of oc-
clusions that can take place. The first case is occlu-
sion due to a static obstacle, and the second alterna-
tive is that two or more tracked objects occlude each
other. The proposed algorithm can handle both of
the cases. The latter case is taken care of straightfor-
wardly, since the measurements are assigned softly to
the occluded objects. In other words, the same mea-
surements are shared between several objects. When
the objects finally split, all of the objects are assigned
different measurements. When an object goes, for ex-
MULTI-OBJECT TRACKING BASED ON SOFT ASSIGNMENT OF DETECTION RESPONSES
299
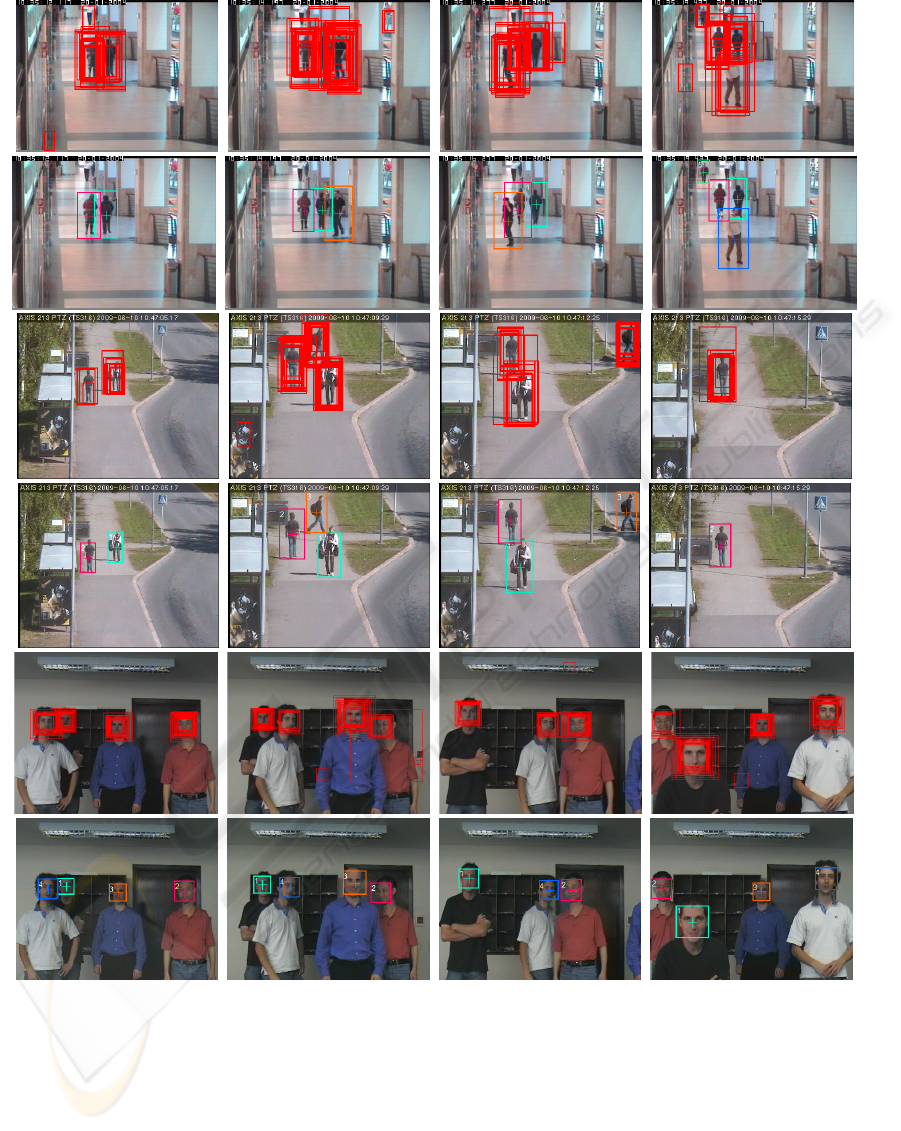
Figure 1: The tracking results of the proposed system for the ExitEnterCrossingPaths1cor (rows 1-2), Axis_Busstop (rows
3-4), and motinas_multi_face_frontal (rows 5-6) sequences. Detector responses (top), and the final tracking results (bottom).
ample, behind a static obstacle, there will not be any
detections which could be used to update the posi-
tion of the occluded object. It is therefore necessary
to update the state of the object based on the dynamic
model (1). When the target reappears from behind the
obstacle, there are going to be measurements avail-
able again, and tracking can continue normally.
3 EXPERIMENTAL RESULTS
The object detectors used in the experiment are
built on the cascade system proposed by Viola and
Jones (2001) and improved by Lienhart and Maydt
(2002). The actual implementation of the detector
is based on the software found in the Intel OpenCV
Library (http://sourceforge.net/projects/
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
300

opencvlibrary/).
Human Tracking. For the experiments on hu-
man tracking, the training samples needed for
the cascade detector are taken from the Daim-
lerChrysler Pedestrian Classification Benchmark
Dataset (Munder and Gavrila, 2006). The pro-
posed algorithm has been tested on several
sequences from the CAVIAR database (http:
//homepages.inf.ed.ac.uk/rbf/CAVIAR/).
To demonstrate the feasibility of the concept de-
scribed in this paper, some results of the test sequence
ExitEnterCrossingPaths1cor are shown in Fig. 1. The
proposed method can successfully track two objects
even if they are occluded by a third person. Our own
Axis_Busstop sequence has been captured using a
PTZ camera that pans and zooms in to a person when
he is walking by a bus stop. During the course of
sequence the size of the objects changes significantly
and turning the camera causes occasionally a large
number of false measurements. Since there are also
several objects that are tracked, the results indicate
that the method is also able to track objects with a
moving camera (Fig. 1).
Face tracking. To evaluate the usefulness of our
method for tracking multiple faces, the method was
tested in conjunction with a basic face detector. For
face detection we used the face detector included in
the OpenCV library directly. The face sequence moti-
nas_multi_face_frontal used for testing is part of the
AVSS2007 dataset (http://www.elec.qmul.ac.
uk/staffinfo/andrea/avss2007_d.html). The
sequence in question includes many situations where
four targets repeatedly occlude each other while ap-
pearing and disappearing from the field of view of the
camera. The results show that the method is able to
track the objects after a total occlusion (Fig. 1).
All the tests were run on a regular Pentium 4
2.8GHz desktop PC using MATLAB. Based on the
studies on all test sets, the most computationally in-
tensive part of the method is usually detection. Also
computation of the Kalman gain (9) may take some
time depending on the number of measurements.
However, based on the performance study of the cur-
rent MATLAB implementation we are confident that
the method is feasible for different applications when
implemented in C/C++.
4 CONCLUSIONS
We have presented a new algorithm for tracking mul-
tiple objects based on detector responses. The method
utilizes the Kalman filter and Expectation Maximiza-
tion (EM) algorithms in order to update the state of
the objects and assign detector responses to them.
Current implementation uses a well-known cascade
classifier to detect the objects of interest. Preliminary
experiments conducted clearly indicate the usefulness
of the approach proposed in this paper.
REFERENCES
Dempster, A., Laird, N., and Rubin, D. (1977). Max-
imum likelihood from incomplete data via the EM
algorithm. Journal of the Royal Statistical Society,
39(1):1–38.
Fortmann, T., Bar-Shalom, Y., and Scheffe, M. (1983).
Sonar tracking of multiple targets using joint proba-
bilistic data association. IEEE-JOE, 8(3):173–184.
Gavrila, D. (2000). Pedestrian detection from a moving ve-
hicle. In Proc. ECCV, volume 1843 of LNCS, pages
37–49.
Hannuksela, J., Huttunen, S., Sangi, P., and Heikkilä, J.
(2007). Motion-based finger tracking for user inter-
action with mobile devices. In Proc. CVMP.
Huang, C., Wu, B., and Nevatia, R. (2008). Robust ob-
ject tracking by hierarchical association of detection
responses. In Proc. ECCV, volume 5303 of LNCS,
pages 788–801.
Huttunen, S. and Heikkilä, J. (2008). Multi-object tracking
using binary masks. In Proc. ICIP, pages 2640–2643.
Joo, S.-W. and Chellappa, R. (2007). A multiple-hypothesis
approach for multiobject visual tracking. IEEE-TIP,
16:2849–2854.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Trans. of the ASME-Journal
of Basic Engineering, 82:35–45.
Leibe, B., Schindler, K., and Van Gool, L. (2007). Coupled
detection and trajectory estimation for multi-object
tracking. In Proc. IEEE ICCV, pages 1–8.
Lienhart, R. and Maydt, J. (2002). An extended set of haar-
like features for rapid object detection. In Proc. ICIP,
volume 1, pages 900–903.
Mikolajczyk, K., Schmid, C., and Zisserman, A. (2004).
Human detection based on a probabilistic assembly of
robust part detectors. In Proc. ECCV, volume 3021 of
LNCS, pages 69–82.
Munder, S. and Gavrila, D. (2006). An experimen-
tal study on pedestrian classification. IEEE-TPAMI,
28(11):1863–1868.
Reid, D. (1979). An algorithm for tracking multiple targets.
IEEE-TAC, 24(6):843–854.
Singh, V. K., Wu, B., and Nevatia, R. (2008). Pedestrian
tracking by associating tracklets using detection resid-
uals. In Proc. IEEE WMVC, pages 1–8.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Proc. IEEE
CVPR, volume 1, pages 511–518.
Wu, B. and Nevatia, R. (2005). Detection of multiple, par-
tially occluded humans in a single image by bayesian
combination of edgelet part detectors. In Proc. IEEE
ICCV, volume 1, pages 90–97.
MULTI-OBJECT TRACKING BASED ON SOFT ASSIGNMENT OF DETECTION RESPONSES
301
