
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION
Kenji Okuma, Eric Brochu, David G. Lowe and James J. Little
The University of British Columbia, Vancouver, Canada
Keywords:
Object localization, Active learning, Adaptive interface.
Abstract:
Thanks to large-scale image repositories, vast amounts of data for object recognition are now easily available.
However, acquiring training labels for arbitrary objects still requires tedious and expensive human effort. This
is particularly true for localization, where humans must not only provide labels, but also training windows
in an image. We present an approach for reducing the number of labelled training instances required to
train an object classifier and for assisting the user in specifying optimal object location windows. As part
of this process, the algorithm performs localization to find bounding windows for training examples that are
best aligned with the current classification function, which optimizes learning and reduces human effort. To
test this approach, we introduce an active learning extension to a latent SVM learning algorithm. Our user
interface for training object detectors employs real-time interaction with a human user. Our active learning
system provides a mean performance improvement of 4.5% in the average precision over a state of the art
detector on the PASCAL Visual Object Classes Challenge 2007 with an average of just 40 minutes of human
labelling effort per class.
1 INTRODUCTION
It is possible to improve the classification perfor-
mance of machine learning methods for object recog-
nition by simply providing more training examples.
However, the cost of providing labelled data—asking
a human to examine images and provide labels—
becomes impractical as training sets grow.
In addition, object localization with bounding
windows is important for many applications and plays
a significant role in improved performance (Lazebnik
et al., 2006; Mutch and Lowe, 2006; Viola and Jones,
2004), but this also places an increased burden on hu-
man labelling by requiring accurately aligned bound-
ing windows around each training instance.
We present a method for using active learning
(Settles, 2010; Tong and Koller, 2001) to reduce
the required number of labelled training examples to
achieve a given level of performance. Our method
also proposes optimal bounding windows aligned
with the current classification function. Active learn-
ing refers to any situation in which the learning algo-
rithm has control over the inputs on which it trains,
querying an oracle to provide labels for selected im-
ages. In particular, we are concerned with the prob-
lem where a person is required to provide labels
for bounding windows. Unlike image classification
where the image is classified as a whole, we apply this
approach to object localization by iteratively select-
ing the most uncertain unlabelled training windows
from a large pool of windows, and present them to
the user for labelling. If the object of interest is cor-
rectly bounded by the localization window, the hu-
man provides a positive label, otherwise they provide
a negative label or indicate their uncertainty. We have
designed a user interface that is efficient for the user
and provides feedback on performance while also en-
abling the user to retain some initiative in selecting
image windows.
Our experimental results apply the approach to
the PASCAL Visual Object Classes 2007 (VOC2007)
(Everingham et al., 2007) on twenty different cat-
egories learned with mixtures of multi-scale de-
formable part models from Felzenswalb et al.
(Felzenszwalb et al., 2009), one of two joint win-
ners in the VOC2009 challenge for object localization
problems. In the first experiment, we show that we
can match their results on VOC2007 data while using
many fewer labelled windows for training. Then we
demonstrate our full user interface on more diverse
images, such as those obtained from web search en-
gines and show how it enables a user to efficiently
improve performance on VOC2007. While these ex-
periments show that our actively trained deformable
part model works well with active learning, the sys-
tem does not depend on a specific classifier or fea-
248
Okuma K., Brochu E., G. Lowe D. and J. Little J..
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION.
DOI: 10.5220/0003317302480258
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 248-258
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
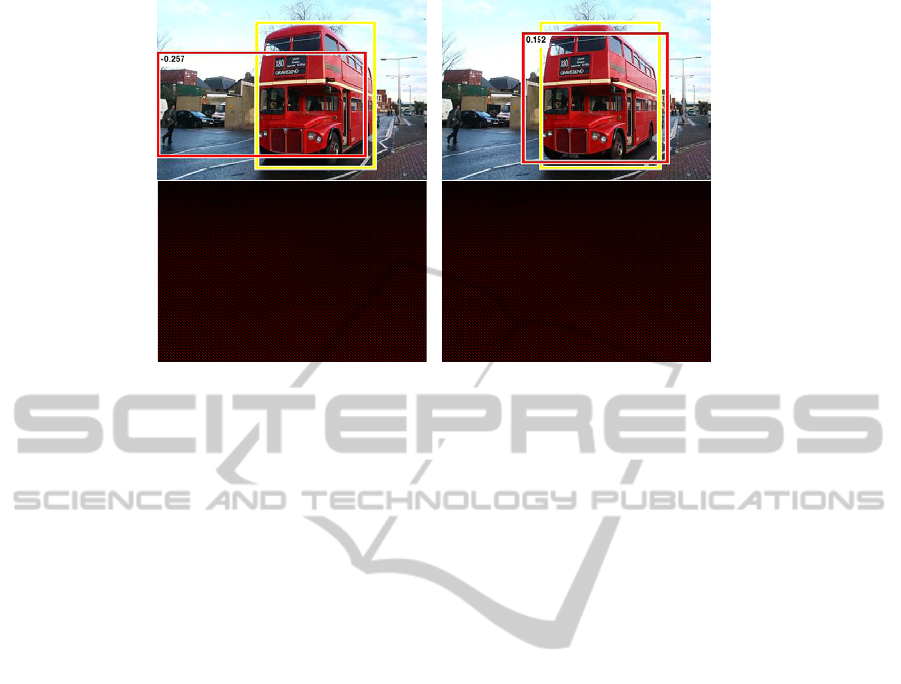
Figure 1: Screen shots of object detection results. This shows how our active learning approach improves object local-
ization. The top left shows the highest scoring detection using only VOC 2007 data, whereas the top right shows the result
after retraining with additional data obtained using our active learning interface. The bottom row shows associated confidence
maps in the same scale. Note how the detection confidence increased and the peak position was shifted. Yellow boxes are the
ground truth and red boxes are detections with the associated detection confidence.
ture set. If other classifiers or features are found to
be more suitable to a domain, we can also incorporate
them into our framework.
2 ACTIVE LEARNING FOR
IMAGE LABELLING
Image labelling requires human effort to supply the
labels for each positive window in the training set.
This typically involves thousands of instances, and
is thus extremely labour-intensive. To make object
recognition practical over multiple domains, we need
to recognize that human labelling is a costly resource,
and must be used as efficiently as possible. Ac-
tive learning is the machine learning method typically
used in this case. A full discussion of active learning
is beyond the scope of this paper, so we will focus
only on the most relevant areas for our work. We di-
rect the interested reader to, e.g., the recent review by
Settles (Settles, 2010) for a more extensive survey.
In pool-based active learning, which we use here,
candidate data are selectively sampled for labelling
from a pool of unlabelled data U. The model is
then updated to take the new labels into account,
and new candidates selected. Candidate selection
is typically performed by greedily selecting data x
∗
from U according to some utility function, x
∗
=
argmax
x∈U
U(x). The process repeats as long as the
human labeller is willing, or until some other termi-
nation condition is reached.
The candidate selection objective function is de-
signed to maximize the utility of the labels gathered,
typically by some measure of the expected informa-
tiveness of the labels. This is what makes active learn-
ing efficient in situations where data is plentiful but
labelling it is expensive. By identifying the training
instances that actually impact the model, fewer la-
bels are required, and the bottleneck can be reduced.
In Section 3.1, we use an uncertainty sampling util-
ity function (Lewis and Gale, 1994), which is popu-
lar as it performs well on a variety of problems and
has been extensively studied. Other methods include
maximizing entropy, combining a committee of mod-
els, or maximizing the expected model change.
In recent years, active learning in computer vi-
sion has gained much attention. While various active
learning extensions have been proposed in image clas-
sification (Collins et al., 2008; Kapoor et al., 2007;
Qi et al., 2008; Vijayanarasimhan et al., 2010; Zhang
et al., 2008), relatively little attention has been paid to
the more challenging problem of object localization
(Abramson and Freund, 2005; Siddiquie and Gupta,
2010; Vijayanarasimhan and Kapoor, 2010). Object
localization requires a model that can identify bound-
ing windows for the object in each image—there can
be zero, one or many such boxes in a single im-
age. Image classification needs to consider only a sin-
gle global classification per image. Applying active
learning to localization requires a substantial change
in approach, as a single label cannot be applied to an
image—it much be applied to potentially numerous
and overlapping windows of an image. Most active
learning approaches are therefore infeasible for ob-
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION
249

ject localization problems in even a relatively large
scale dataset such as the VOC2007 dataset of around
10,000 images. To the best of our knowledge, we are
the first to apply and test active learning performance
on the PASCAL or similar datasets.
3 ALGORITHM
Our system for active learning uses the Support Vec-
tor Machine (SVM) (Sch
¨
olkopf and Smola, 2002)
classifier, which has proven its success in many state-
of-the-art recognition systems (Dalal and Triggs,
2005; Moosmann et al., 2006; Mutch and Lowe,
2006; Zhang et al., 2006). We also incorporate the re-
cent latent SVM (LSVM) approach of Felzenszwalb
et al. (Felzenszwalb et al., 2009). We will briefly
review these models and describe how we incorpo-
rate active learning. The goal of a supervised learning
algorithm is to take n training samples and design a
classifier that is capable of distinguishing M different
classes. For a given training set (x
1
, y
1
), . . . , (x
n
, y
n
)
with x
i
∈ ℜ
N
and y
i
∈ −1, +1 in their simplest form
with two classes, LSVM is a classifier that scores a
sample x with the following function (Felzenszwalb
et al., 2009),
f
β
(x) = max
z∈Z(x)
β · Φ(x, z) (1)
Here β is a vector of model parameters and z are latent
values. The set Z(x) defines possible latent values for
a sample x. Training β then becomes the following
optimization problem.
min
β,ξ
i
≥0
1
2
k
β
k
2
+C
n
∑
i=1
ξ
i
(2)
s.t. ∀i ∈ {1, . . . , n} : y
i
f
β
(x
i
) + b ≥ 1 − ξ
i
(3)
and ξ
i
≥ 0 (4)
where C controls the tradeoff between regularization
and constraint violation. For obtaining a binary la-
bel for x, we have the decision function, sign(h(x)),
where
h(x) = f
β
(x) + b (5)
In general, a latent SVM is a non-convex optimiza-
tion problem. However, by considering a single pos-
sible latent value for each positive sample that can be
specified in training, it becomes a convex optimiza-
tion problem for classical SVMs. For multi-scale de-
formable part models, the set of latent values repre-
sents the location of parts for the object.
3.1 Active Learning on a Latent SVM
We incorporate active learning into an LSVM by at
each iteration selecting the candidate that has the min-
imum distance to the decision boundary. That is, for
a set of data C ⊆ U, where U is the set of unlabelled
image windows, we select:
argmin
x∈C
h(x
i
)
k
β
k
(6)
This is the candidate datum we ask the human expert
to label. Ideally, we then move the new labelled da-
tum from the candidate to the training set, update the
LSVM model, and repeat, selecting a new candidate
based on the updated model. However, due to the
heavy computational load of LSVM, we choose to up-
date the model in a batch after collecting a set of new
labelled data. In our experiments, we obtain a set of
unlabelled image windows by applying a sliding win-
dow at multiple scales on the image and computing
a Histogram of Oriented Gradients (HOG) descriptor
(Dalal and Triggs, 2005; Felzenszwalb et al., 2009)
from each window as our datum.
This uncertainty sampling utility seeks to label
the most uncertain unlabelled datum to maximize the
margin. There are known to be other successful cri-
teria for SVM active learning, particularly version
space methods (Tong and Koller, 2001). We use un-
certainty sampling as we wish to remain agnostic as
to the underlying model. It has also been shown to
perform well and has the advantage of being fast to
compute and easy to implement. The learning task
then becomes an iterative training process as is shown
in Algorithm 1.
4 EXPERIMENTS
We will first test our active learning approach against
a state-of-the-art object detector on VOC2007 (Ever-
ingham et al., 2007) to show the ability to reduce la-
belling requirements without sacrificing performance
. Then we will describe our user interface for active
learning and show its effective performance over the
object categories of the VOC2007 dataset.
4.1 The PASCAL Visual Object Classes
2007
The PASCAL Visual Challenge has been known as
one of the most challenging testbeds in object recog-
nition. The VOC2007 dataset contains 9,963 images:
50% are used for training/validation and the other
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
250

Algorithm 1: Pool-based active learning algorithm for im-
age window labelling
x is a window descriptor, I is a set of m images, L
is a set of labelled image windows and U is a set of
unlabelled windows.
1: {Collect a set of unlabelled image windows, U}
2: U =
/
0
3: for i ∈ I do
4: U = U ∪ x where x is the highest scoring de-
tection window in image i
5: end for
6: while the user continues the active learning ses-
sion do
7: {Obtain a set of new labelled data, C , Y }
8: C =
/
0
9: Y =
/
0
10: for t = 1 to n do
11: x
∗
= argmin
x∈U
h(x
i
)
k
w
k
12: Get the label y
∗
of the datum x
∗
from the
human expert
13: The expert can add a set of k samples X =
{x
0
, x
1
, · ·· , x
k
} in case of miss detections or
false positives with a set of associated labels
L = {y
0
, y
1
, · ·· , y
k
} of X
14: C = C ∪ x
∗
∪ X
15: Y = Y ∪ y
∗
∪ L
16: U = U − x
∗
17: end for
18: Add C and Y to the training set and update the
LSVM model,
ˆ
β, { ˆx
l
, ˆz
l
}
m
l=1
and
ˆ
b where m is
the number of support vectors
19: end while
50% are used for testing. We used VOC2007 to
test our active learning approach to see if it would re-
duce labelling requirements for positive data. We use
our own Python implementation of Felzenszwalb et
al.’s detector (Felzenszwalb et al., 2009) with multi-
scale deformable part models. The original source
code is available online and written in Matlab and C
1
.
In our first experiment, we used the data provided
by the VOC2007 dataset to show that active learning
could achieve the same classification performance by
using only an actively selected subset of the data. To
show the reduced data requirements for active learn-
ing, we trained our model in each category on four
different positive datasets, including 25%, 50%, 75%
and 100% of all positive training images, comparing
the effect of adding training data randomly and ac-
tively. We used the same negative dataset in these ex-
periments, as negative data is cheap to collect. For
1
The source code is publicly available at
http://people.cs.uchicago.edu/∼pff/latent/
both the random and active data sets, we start by
randomly selecting the first 25% of positive images
and training. In the random training set, we then
repeatedly add a further 25% of the positive images
and train again, until all the available data have been
added. We performed active sampling by first train-
ing our base model with a randomly selected 25% of
the positive data. We used the base model to choose
the most uncertain positive images from the remain-
ing pool of positive data, repeatedly adding 25% of
the data. Due to randomness in the training procedure,
we repeated these experiments five times and present
average results with error bars. Figure 2 shows the
results of all twenty categories.
This simulation shows that active sampling is ef-
fective at selecting the most useful data for training.
In most cases, a total of only half of all positive data
is required to get the performance of the full training
set.
5 APPLICATION
In this section, we introduce the active localization
interface for our interactive labelling system, ALOR
(Active Learning for Object Recognition). Our inter-
face iteratively presents the most informative query
windows to the user and allows the user to correct
mistakes made by the model. It is designed to work
on any arbitrary user specified object category, using
web images it automatically collects from major web
search engines such as Google, Yahoo, and Flickr.
Here, we demonstrate the interface on the “cow” cate-
gory by using a set of images from the Google Image
search engine.
We first collect a set of images from the Google
Image search engine with query keywords such as
“cow.” We then use our cow detector that is trained
with VOC2007 data as shown in Figure 2 and let the
algorithm actively select each query. Figure 3 shows
some screen shots of our system interface, which de-
scribes four major cases for labelling data. These
cases are: (a) the window is indeed a cow, (b) the
window is not a cow, (c) the window is ambiguous,
perhaps due to partial overlap, so the window should
be ignored for training, and finally (d) a user wishes
to add a positive instance that was missed by the clas-
sifier or correct false positives. The rectangular boxes
(in red) are queries selected by active learning with
the minimum distance to the decision boundary. The
green boxes are positive classifications in the current
image that were not selected as queries. These green
boxes are useful for giving the user feedback on the
current classifier performance and to allow the addi-
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION
251
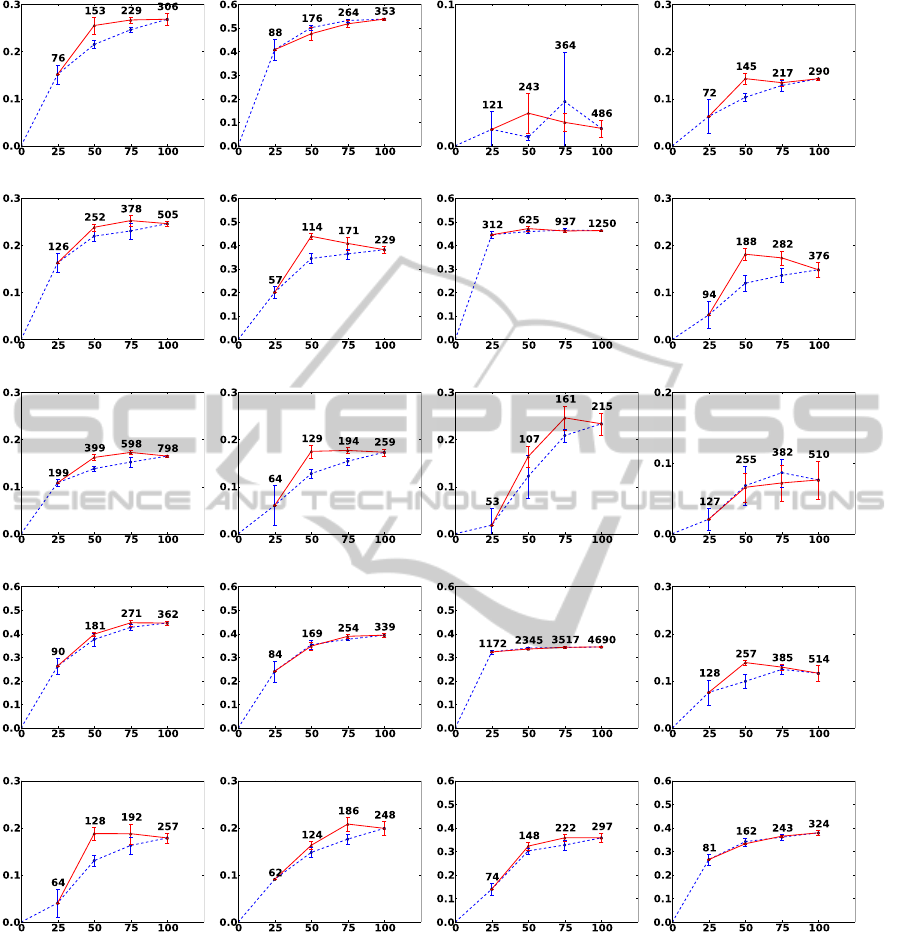
(a) aeroplane (.268) (b) bicycle (.537) (c) bird (.009) (d) boat (.142)
(e) bottle (.245) (f) bus (.376) (g) car (.463) (h) cat (.143)
(i) chair (.163) (j) cow (.173) (k) table (.233) (l) dog (.061)
(m) horse (.443) (n) motorbike (.393) (o) person (.344) (p) plant (.117)
(q) sheep (.179) (r) sofa (.196) (s) train (.355) (t) tvmonitor (.380)
Figure 2: VOC2007: Random vs. active sampling of positive data. There are 20 different visual categories. The horizontal
axis of each figure represents the portion of positive training samples in percent (%) and the vertical axis gives the average
precision. The solid red line shows the result of active sampling and the dotted blue line is for random sampling. We performed
both random and active sampling of positive data five times with a different random seed. The errorbars are based on one
standard deviation. For both random and active data sets, we start by training on a randomly selected 25% of positive samples.
In the random training set, we then repeatedly add a further 25% of the positive samples and train again. In the active set, we
added an additional 25% of actively selected samples iteratively until we use the full positive data. The number of positive
samples in each subset is shown above each errorbar. The final average precision with the full positive data is shown next to
the name of a category. Note that the result of active sampling often performs better with 50 % or 75 % of the images.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
252
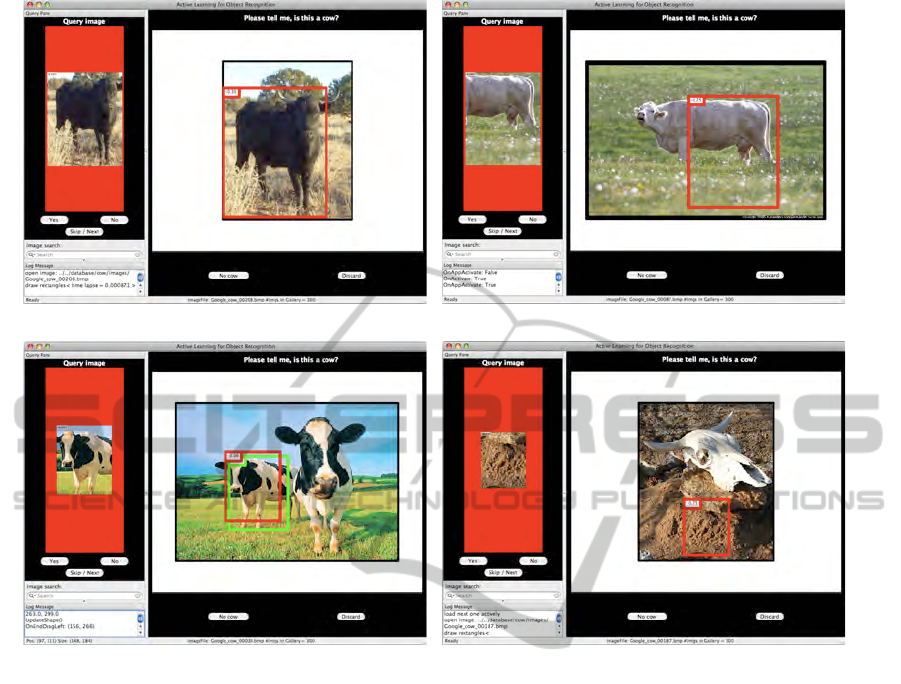
(a) Case 1: YES (b) Case 2: NO
(c) Case 3: MAYBE (d) Case 4: No target object
Figure 3: Screen shots of our interactive labelling system with our actively tranined LSVM. This figure shows a set of
screen shots of our interactive labelling system. In each case, the query window to be labelled is shown on the left, and the
image from which it was selected is shown on the right (with the query window highlighted in red). (a) shows an instance
when the query window is indeed a cow, so the appropriate answer is YES. (b) shows an example bounding window that is
not a cow, so the answer is NO. Note that the bounding window partially covers a real cow, so it would not be obtained from
the usual approach of labelling negative images. (c) shows a query window where it is hard to decide whether it is a cow, due
to being largely occluded, misplaced, or incorporating multiple cows, so the answer is MAYBE, in which case we can just
skip the query. (d) shows an instance in which an image does not contain any cow. In such case, a human user can specify
that all windows in the image are negative examples and a machine selects only false positive windows. In the case of missed
detections, a human user can specify the centroid of the object by clicking on the image and the current classifier suggests the
optimally aligned bounding window with the highest classification confidence.
tion of rare training examples that may lie far enough
away from the decision boundary that they may oth-
erwise never be detected or queried.
When a user wishes to add a training example that
was not queried, they can simply click on the image.
This will select the window with the highest classi-
fication confidence that contains the location of the
mouse click. Therefore, the current classifier is still
used to select the best-aligned training window, and
user effort is minimized.
The interface is written in Python and C and uti-
lizes multi-core CPUs to speed up the process and re-
alize real-time interactions between a human user and
a machine. Our interface currently takes less than a
second (on an 8-core machine) to update and deter-
mine the next query windows upon receiving new la-
bels, though the precise time depends on the number
of dimensions of visual features and the resolution of
the image. The interactive process can be sped up by
precomputing image features, which we did in our ex-
periments shown in Table 1.
5.1 The PASCAL Visual Object Classes
In this section, we demonstrate that our prototype
active learning GUI enables fast, efficient labelling
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION
253
BICYCLE (.537)
TOP 5:
WORST 5:
SOFA (.257)
TOP 5:
WORST 5:
CHAIR (.163)
TOP 5:
WORST 5:
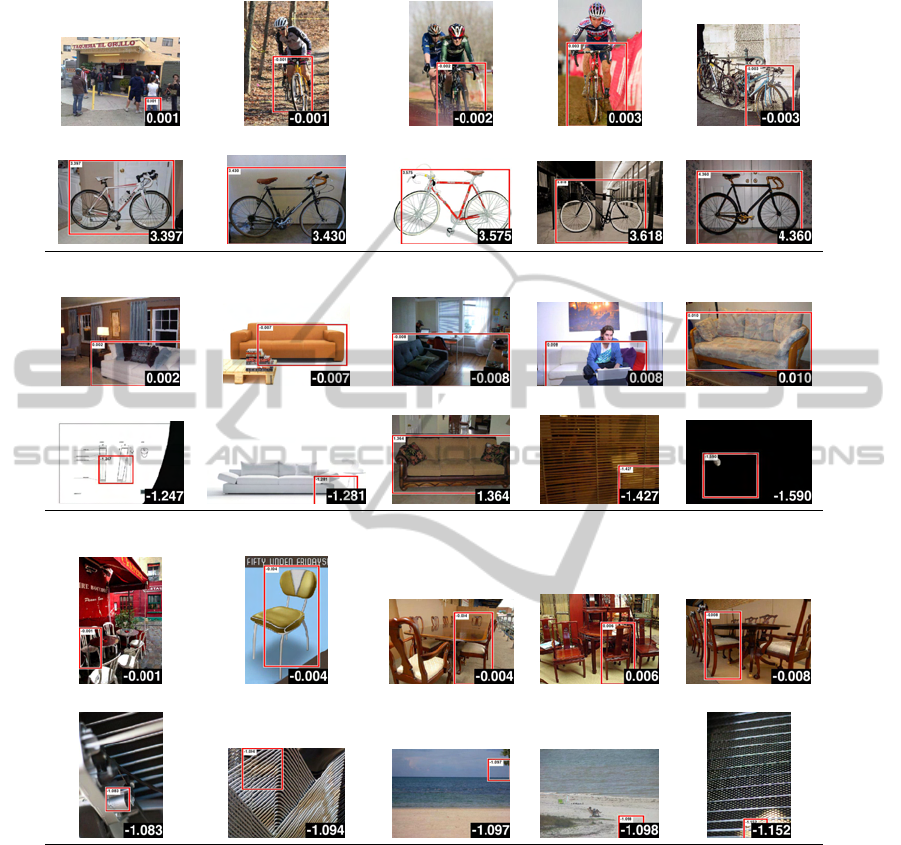
Figure 4: Training images from Flickr, sorted for active learning. This shows query windows for three categories. For
each category, the best 5 and worst 5 actively selected query windows are shown. For each category, we downloaded 3,000
images from the Flickr image search with keywords such as “bicycle”, “sofa”, and “chair.” These web images are then
sorted based on the window with the highest classification confidence in each image, as described in Algorithm 1 in Section
3.1. The red box represents the query window for the image with the associated detection score shown at the bottom right
corner of the image. Large positive scores indicate high confidence that the object is present, large magnitude negative scores
indicate confidence that it is not present, while scores near zero represent maximum uncertainty (are close to the margin). The
categories are ordered with the average precision shown next to the category title. Note that the worst 5 query windows in the
bicycle category contain target objects that are easily classified, whereas the worst 5 query windows in the chair category do
not contain any target objects. In the sofa category with the middle AP score, the worst 5 query windows include ones that
contain target objects and ones without.
to improve performance on data from the PASCAL
VOC2007. For comparison, we first prepare our base-
line detectors by training a latent SVM with HOG on
all twenty categories. The third column of Table 1
shows the average precision of each category. Due
to randomness in the training procedure, those num-
bers do not exactly match with ones in (Felzenszwalb
et al., 2009) even with the same parameter settings,
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
254
but they differ by less than 1 percent.
Next we perform a pool-based active learning ses-
sion using Algorithm 1 with our active learning GUI
to train these baseline detectors and improve their per-
formance. With our interface, we collect training im-
ages from Flickr, which was a source for VOC2007
images. We used the Flickr Image API to obtain only
images from after the competition date of VOC2007
to prevent the possibility of obtaining test data from
the competition. Our interface allows a human user to
search images based on a query word such as “cow,”
“motorbike,” etc. We collected the first 3000 images
from the Flickr database in each category. In order to
further speed up the training process, we also cache
visual features, using our baseline detectors to scan
images, and sort them based on the uncertainty score
in Eq. (6) for the highest detection scoring window.
It takes approximately 3-4 hours to search, download
and scan 3000 images (around 164 million bounding
windows) to generate the set of most-uncertain query
windows. However, this preprocessing can be done
with no human interaction other than specifying the
tag. The effectiveness of active learning can be seen
in Figure 4 which shows the best 5 and worst 5 ac-
tively selected query windows in each category. The
worst 5 query windows in the bicycle category con-
tain target objects that are easily classified, whereas
the worst 5 query windows in the chair category do
not contain any target objects. In the sofa category,
the worst 5 query windows include ones that contain
easy target objects as well as ones without.
Table 1 summarizes the results and training data
statistics. We downloaded in total 60,000 images
from Flickr and annotated bounding windows in 300
actively selected images for each category based on
uncertainty of the highest scoring detection window
of each image. We used the highest scoring detection
window for sorting images in order to get as many
positive labels as possible from a large unlabelled
data pool. We then conducted two simulations. One
is a common active learning approach where we an-
swer just 300 query windows based on our uncertainty
sampling criteria (ALORquery). The other is a case
of fully utilizing our interface where we are allowed
to not only answer these 300 query windows but also
add user selected query windows (ALORfull). The
time required for the human interactive labelling of
these 300 image queries was around 20 minutes and
less than 40 minutes was required for fully utilizing
our interface and giving more annotations for each
category.
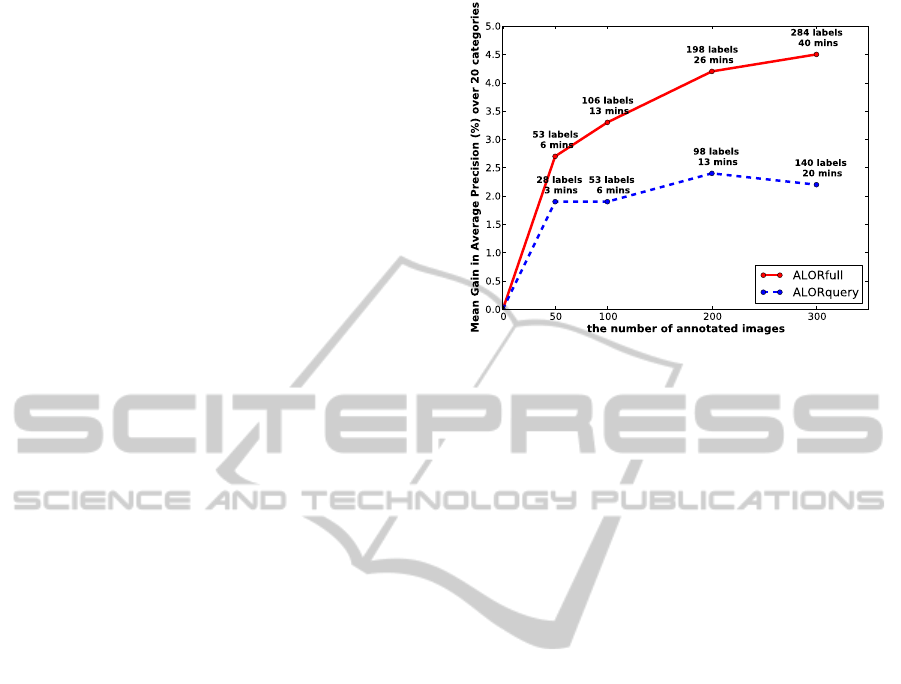
Figure 5 shows the performance comparison of
both ALORquery and ALORfull in a different num-
ber of training images. It shows that ALORfull con-
Figure 5: Performance comparison of ALORfull and
ALORquery. Each point represents the average number of
additional positive labels and the average training time per
category. By allowing a user to add additional queries, the
performance is consistently better. Note that just 53 labels
from ALORfull outperform 140 labels from ALORquery.
sistently outperforms ALORquery, which indicates
that user selected queries improve the overall detec-
tion performance. More results in Table 2 demon-
strate an impact of user selected queries on the final
classification performance. In the table, we show the
result of ALORquery with 300 images and ALORfull
with 100 and 300 images. For the cases of ALOR-
full, around 40 % of queries are selected by a user.
Those queries are often quite challenging for a ma-
chine to choose, because they are often either erro-
neous or missed detections and distant from the de-
cision boundary of a latent SVM. A human oracle is
quite helpful in such cases.
Fig. 6 presents the gain of our best result for each
category in the average precision. From our exper-
iments, we can make several observations. First, in
most of the categories, our active learning interface
allows a user to quickly improve the performance of
the baseline detectors. Second, our user interface also
allows a user to achieve a better performance than
would be obtained by a simpler learning approach in
which a user answers Yes/No/Maybe queries for se-
lected windows. A lot of difficult machine-selected
queries that a user is not sure about (Fig. 3(c), for
example) can be easily corrected with our interface.
Third, with less than 40 minutes of user input, we can
achieve significant performance improvement even
over the best competition results. The PASCAL com-
petition has a section in which users can provide their
own data, but the difficulty of collecting such data
means there have seldom been entries in that section.
Our active learning approach and GUI would enable
users to efficiently collect useful data for improved
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION
255
Table 1: Average precision on VOC2007 and training data statistics. This figure shows the result of our experiments and
training data statistics. The first section shows the number of object labels in VOC2007 data and the result obtained by our
implementation of the baseline latent-SVM with HOG (Felzenszwalb et al., 2009) on VOC2007 test data (i.e., LSVM+HOG).
The middle section shows the total number of additional positive and negative labels and the AP score with these additional
labels. We obtained the additional data by using models from LSVM+HOG and our active learning GUI on only 300 actively
selected images (one query per image, 300 queries in total) out of 3000 web images for each category. This represents a
common active learning approach with uncertainty sampling criteria where a user is not allowed to add any additional queries
and is only queried by a machine (i.e., ALORquery). The last section shows additional labels and AP scores on the same
300 actively selected images. But a user is now allowed to fully utilize our interface by not only answering queries from
a machine but also adding his/her own queries with our interface (i.e., ALORfull). It required only about 20 minutes per
class for a person using our interface to improve the results from the first column and takes about 40 minutes to get the best
performance improvement shown in the third column. Note that a user selects roughly 100 ∼ 200 additional query windows
in each category, which are mostly erroneous or missed detections that are never selected by the uncertainty criteria, but
effectively presented by our interface. The best AP scores are in bold face and these best scores already exceed the best
competition results (of any method) over 17 of 20 categories from VOC2007 (Everingham et al., 2007). The bottom row
shows the mean AP score of all categories for each method.
LSVM+HOG ALORquery ALORfull
additional labels additional labels
object labels APs pos neg APs pos neg APs
aerop. 306 .268 209 27 .283 293 12 .282
bicyc. 353 .537 227 12 .548 359 26 .555
bird 486 .009 72 151 .048 172 134 .095
boat 290 .142 87 89 .144 162 69 .143
bottle 505 .245 133 100 .259 300 93 .294
bus 229 .376 108 26 .435 281 29 .504
car 1250 .463 97 104 .468 186 138 .489
cat 376 .143 108 3 .209 282 0 .224
chair 798 .163 139 66 .161 373 93 .180
cow 259 .173 133 63 .184 430 92 .254
table 215 .233 164 46 .295 233 67 .314
dog 510 .061 130 38 .125 235 33 .131
horse 362 .443 167 31 .398 321 69 .370
mbike 339 .393 229 8 .414 348 50 .431
person 4690 .344 47 183 .342 122 218 .344
plant 514 .117 136 26 .153 370 15 .169
sheep 257 .179 178 25 .257 512 68 .282
sofa 248 .196 161 49 .230 212 56 .257
train 297 .355 85 73 .354 184 111 .400
tvmon 324 .380 195 45 .371 321 69 .392
Mean AP .261 .283 .306
performance in such competitions or for real world
applications.
In the boat, horse and person categories, our active
learning approach did not provide much improvement
for the relatively small additional amount of training
data. We observe that both the boat and horse cat-
egories have a particularly heterogeneous dataset in
both the size and shape of the object. Some of those
examples are presented in Fig. 7. The person cate-
gory differs in that it already has so many object labels
(4690, as opposed to the median 346) that it likely
requires many more labels than the few hundred we
provide to improve performance.
6 CONCLUSIONS
We have presented an active learning system for ob-
ject recognition and localization. This work differs
from active learning work for image classification in
that instead of learning a single classification for the
image, our model can identify and localize objects,
including multiple instances of the object of inter-
est in a single image. Our experiments demonstrate
that the active learning approach reduces the number
of labels required to train an object classifier without
reducing performance over state-of-the-art classifica-
tion schemes. It also greatly reduces the human effort
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
256
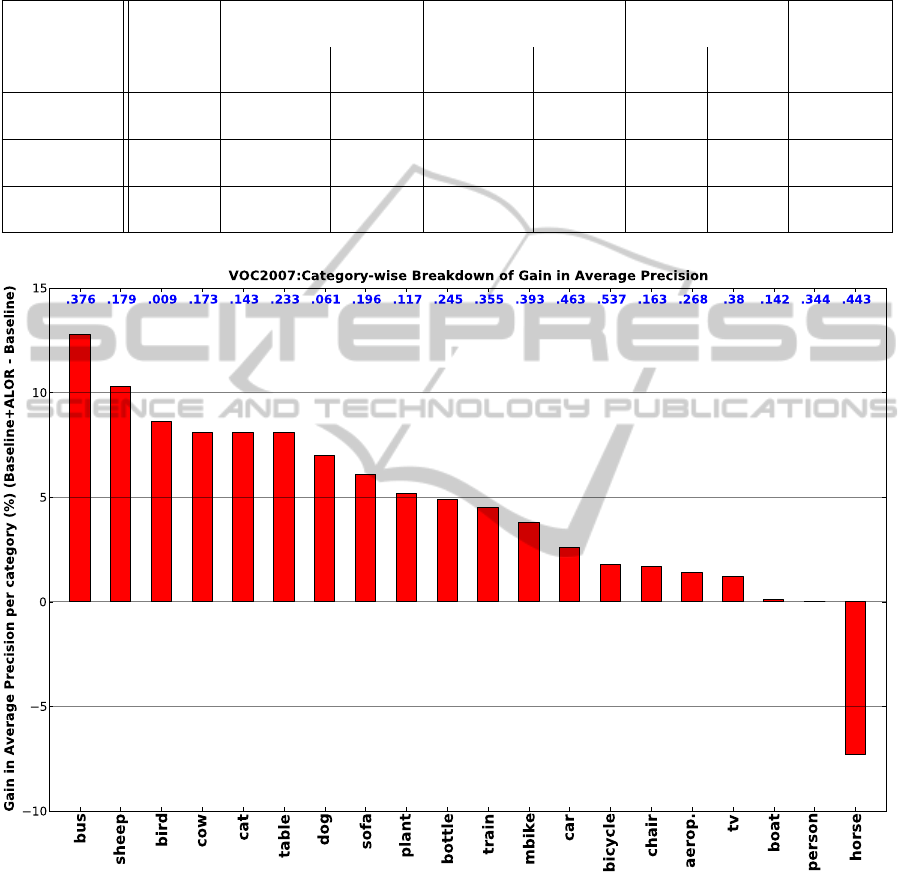
Table 2: Query statistics for ALORquery and ALORfull. The average distance represents the average distance per query to
the decision boundary of a latent SVM. The average training time, additional labels, and mean APs are measured per category.
The proportion of queries is the portion of the total number of queries in all 20 categories. Note that how user-selected queries
influence on the final performance in average precision.
Method
Avg.
Training
Time
(mins)
user selected machine selected Avg.
Mean AP
(%)
queries queries additional labels
proportion
(%)
Avg.
distance
proportion
(%)
Avg.
distance
pos neg
ALORquery
300 images
20 0 NA 100 0.283 140.1 58.25 28.3
ALORfull
100 images
13 42 0.643 58 0.200 106.85 20.15 29.4
ALORfull
300 images
40 43 0.690 57 0.296 284.8 72.1 30.6
Figure 6: Category-wise breakdown of gain in average precisions: VOC baseline vs VOC baseline + ALOR. This figure
shows the improvement for our active learning framework for each category.
required to select image regions containing the object
of interest by automatically finding the most useful
windows in an image. Our system is fast enough to
be used interactively, and we demonstrate a prototype
GUI for active learning of object locations, which
uses image windows to guide human labelling.
While our experiments show that our actively
trained latent-SVM with HOG descriptors works well
with active learning, the system does not depend on
a specific classifier or feature set. If other classifiers,
such as AdaBoost, or features are found to be more
suitable to a domain, we can incorporate them into
our framework. We also believe that other aspects
of object classification can benefit from active learn-
ing, as the expense of labelling is a ubiquitous prob-
lem in machine learning. Fast, efficient labelling can
mean cheaper experiments, faster development time,
and higher-performance flexible object detectors.
AN ADAPTIVE INTERFACE FOR ACTIVE LOCALIZATION
257
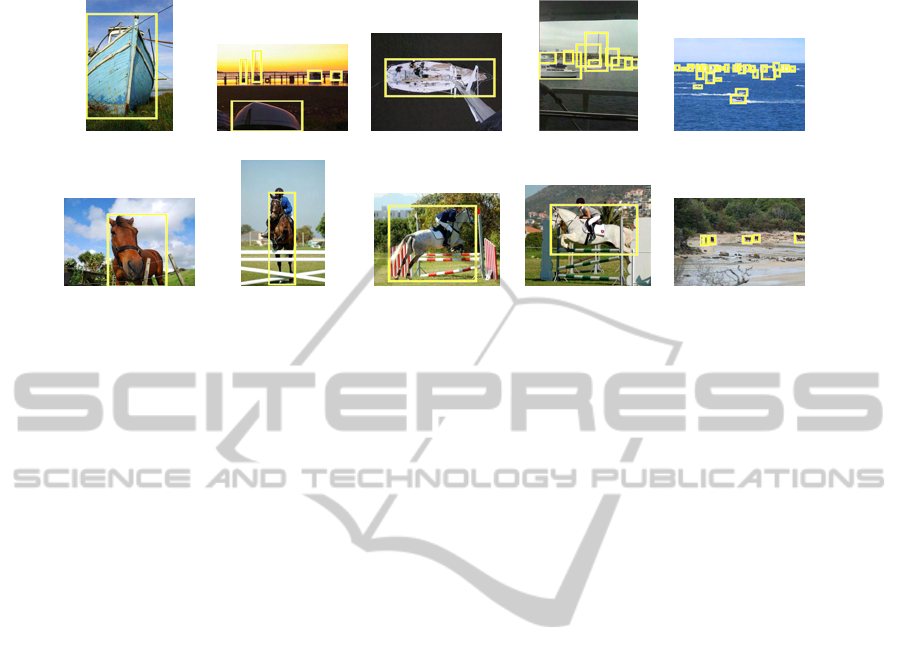
BOAT
HORSE
Figure 7: Heterogeneous shapes and sizes. This shows screen shots of VOC test images. The shots in the top row are for
the boat category and these in the bottom row are for the horse category. Yellow boxes are ground truth.
ACKNOWLEDGEMENTS
The research has been supported by the Natural Sci-
ences and Engineering Research Council of Canada
and the GEOIDE Network of Centres of Excellence,
Terrapoint Canada (A division of Ambercore).
REFERENCES
Abramson, Y. and Freund, Y. (2005). Semi-automatic vi-
sual learning (Seville): A tutorial on active learning
for visual object recognition. In CVPR.
Collins, B., Deng, J., Li, K., and Fei-Fei, L. (2008). To-
wards scalable dataset construction: An active learn-
ing approach. In ECCV.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Everingham, M., van Gool, L., Williams, C., Winn, J., and
Zisserman, A. (2007). The PASCAL Visual Object
Classes Challenge 2007 (VOC2007) Results. http://
www.pascal-network.org/challenges/VOC/voc2007/
workshop/index.html.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2009). Object detection with discrimi-
natively trained part based models. PAMI.
Kapoor, A., Grauman, K., Urtasuna, R., and Darrrell, T.
(2007). Active learning with Gaussian processes for
object categorization. In ICCV.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for recog-
nizing natural scene categories. In CVPR.
Lewis, D. D. and Gale, W. A. (1994). A sequential algo-
rithm for training text classifiers. In Proc. of the 17th
annual international ACM SIGIR conference on Re-
search and development in information retrieval.
Moosmann, F., Larlus, D., and Jurie, F. (2006). Learning
saliency maps for object categorization. In ECCV.
Mutch, J. and Lowe, D. G. (2006). Multiclass object recog-
nition with sparse, localized features. In CVPR.
Qi, G.-J., Hua, X.-S., Rui, Y., Tang, J., and Zhang, H.-J.
(2008). Two-dimensional active learning for image
classification. In CVPR.
Sch
¨
olkopf, B. and Smola, A. (2002). Learning with Ker-
nels: Support Vector Machines, Regularization, Op-
timization and Beyond. MIT Press, Cambridge, MA,
USA.
Settles, B. (2010). Active learning literature survey. Tech-
nical Report 1648, University of Wisconsin-Madison.
Siddiquie, B. and Gupta, A. (2010). Beyond active noun
tagging: Modeling contextual interactions for multi-
class active learning. In CVPR.
Tong, S. and Koller, D. (2001). Support vector machine
active learning with applications to text classification.
ML, 2:45–66.
Vijayanarasimhan, S., Jain, P., and Grauman, K. (2010).
Far-sighted active learning on a budget for image and
video recognition. In CVPR.
Vijayanarasimhan, S. and Kapoor, A. (2010). Visual recog-
nition and detection under bounded computational re-
sources. In CVPR.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. IJCV, 57(2):137–154.
Zhang, H., Berg, A. C., Maire, M., and Malik, J. (2006).
SVM-KNN: Discriminative nearest neighbor classifi-
cation for visual category recognition. In CVPR.
Zhang, L., Tong, Y., and Ji, Q. (2008). Active image la-
beling and its application to facial action labeling. In
ECCV.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
258
