
RESOURCE MANAGEMENT FOR ONE CLASS OF WORKFLOW
PROCESSES
A Stochastic Petri Net Based Approach
Oleg Gorbunov and Valery Sokolov
Department of Computer Science, Yaroslavl State University, Yaroslavl, Russia
{falcon, sokolov}@uniyar.ac.ru
Keywords:
Workflow processes, Petri nets, Stochastic Petri nets, Stochastic Resource-Constrained Petri nets, Management
of resources.
Abstract:
In the paper the new approach for modeling workflow processes have been proposed. This approach is based
on the special class of stochastic Petri nets and allows to model resources that is needed for tasks execution.
Such models are well suited both for qualitative and quantitative analysis of workflow processes. In the paper
the function reflecting the cost of waiting the task execution due to the lack of resources have been introduced.
The problem of minimizing of this function have been stated. The decision approach for this problem have
been introduced. This approach manages resources by means of priorities. In general, optimal priorities may
be found during simulation.
1 INTRODUCTION
One of the most popular and relatively recent method-
ology of enterprise managementis the management of
workflow processes. This methodology deals with the
models of workflow processes. Many languages and
formalisms are proposed for modeling them. One of
such formalisms is Petri nets which have been proven
to be a successful formalism for this reason (van der
Aalst, 1998; van der Aalst and van Hee, 2002).
Many special classes of Petri nets were proposed
for modeling workflow processes. In general, work-
flow processes are modeled by WF-nets (van der
Aalst, 1998), i.e. Petri nets with one initial and one
final places and every place or transition being on a
path from the initial place to the final one. The execu-
tion of a case is represented as a firing sequence that
starts from the initial marking consisting of a single
token on the initial place. The token on the final place
with no tokens left on the other places indicates the
proper termination of the case execution. A model
is called sound iff every reachable marking can ter-
minate properly. Such models reflect the partial or-
dering of activities in the process and abstract from
resources, e.g. machines or personnel, that actually
execute tasks and any quantitative measures of its ex-
ecution.
In (K.M. van Hee, 2005) a notion of RCWF-nets
and a respective soundness property was introduced.
Such models represent WF-nets that take resources
into account.
The concept of time was intentionally avoided in
the classical Petri net as timing constraints may pre-
vent certain transitions from firing. Many different
ways of incorporating time in Petri nets have been
proposed. Some timed Petri net models use deter-
ministic delays (Ramchandani, 1973; Sifakis, 1977).
The others use interval timing (Merlin, 1974; van der
Aalst, 1993) or stochastic delays (G. Florin, 1980;
M.A. Marsan, 1984; M.A. Marsan, 1985).
In real systems execution of tasks in workflow
processes depends on the various conditions, such as
availability of free resources and all needed informa-
tion and so on. Hence for simulation and quantita-
tive analysis of workflow systems these external con-
ditions are essential.
In (Reijers, 2003) a model that takes into account
both resources and timing is proposed. In that book
different heuristic rules for allocation of additional re-
sources that minimize mean throughput time of the
process are also discussed.
168
Gorbunov O. and Sokolov V.
RESOURCE MANAGEMENT FOR ONE CLASS OF WORKFLOW PROCESSESA Stochastic Petri Net Based Approach.
DOI: 10.5220/0004459901680174
In Proceedings of the First International Symposium on Business Modeling and Software Design (BMSD 2011), pages 168-174
ISBN: 978-989-8425-68-3
Copyright
c
2011 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 STOCHASTIC PETRI NETS
WITH PRIORITIES
We propose a class of stochastic Petri nets with prior-
ities SPN
e
. These nets combine properties of GSPN-
nets proposed in (M.A. Marsan, 1985) and Interval
Timed Petri nets (van der Aalst, 1993). SPN
e
-nets are
based on Petri nets with priorities, so begin with these
formalism.
2.1 Petri Nets with Priorities
Definition 2.1 (Petri nets with priorities) Petri net
with priorities (PN
pr
-net) is a tuple (P,T,R, Pr),
where (P,T, R) – Petri net; Pr ∈ T → N ∪{0} – prior-
ity function, that assign for each transition t natural
number Pr(t), priority of the transition.
The definition of marking is the same as for ordi-
nary Petri nets but firing rule differs. The transition
that is active in Petri net P,T,R is potentially active in
Petri net P,T,R,Pr with priorities.
Denote M
pr
() a function M
pr
() ∈ 2
T
→ 2
T
, that
for any set of transitions from T returns the subset of
transitions with maximal priority:
∀J ⊆ T M
pr
(J) = {t ∈ J|
∃t
0
∈ J : Pr(t
0
) > Pr(t)}.
Potentially active transition t
j
of the PN
pr
-net N =
(P,T,R, Pr) is active in marking m, if there is no an-
other potentially active transition t
i
∈ T: Pr(t
i
) >
Pr(t
j
). So, the existence of priorities restricts the
number of active transitions in comparison with the
same Petri net without priorities. Denote At(m) the
set of active transitions of the PN
pr
-net N in marking
m. From the definition of At(m) follows that two tran-
sitions t
i
and t
j
, t
i
6= t
j
are active in marking m only
if they have the same priority: Pr(t
i
) = Pr(t
j
). Active
transition may fire. Firing rule is the same as in the
ordinary Petri net.
It is well known that the expressive power of Petri
nets with priorities is greater than of the ordinary Petri
nets. So, in general, if we model workflow processes
by means ofWF-nets with priorities, soundness prop-
erty would be undecidable.
Let us consider free-choice Petri nets with priori-
ties. Remind that by constructing WF-nets with task
refinement approach using basic structures of choice,
sequential and parallel execution, a free-choice WF-
net will be obtained (van der Aalst, 2000). Relation
SC (structural conflict relation on the set of T) for
such nets is reflexive, transitive and symmetric. So,
we may conclude that it is an equivalence relation
and the set T may be divided into the disjoint subsets
SC
1
,SC
2
.. . SC
k
: SC
1
∪ SC
2
∪ . .. ∪ SC
k
= T.
Obviously, for free-choice PN
pr
-net N all transi-
tions in any subset SC
i
potentially active or not po-
tentially active at the same time. It is easy to prove
that for such nets if there exist at least two transitions
t
i
,t
j
∈ T : t
i
6= t
j
,t
i
SCt
j
,Pr(t
i
) 6= Pr(t
j
) then there exist
dead transitions that will never be active.
Obviously, for free-choice Petri net
N = (P,T, R,Pr), with priorities such that
∀t
i
,t
j
∈ T : t
i
SCt
j
⇒ Pr(t
i
) = Pr(t
j
), for any
marking m At(m) is empty or consists of subsets
SC
a1
,SC
a2
,. ..,SC
ap
with the same priority.
If we constrain the structure of the net by the free-
choice property and require certain rules on priorities
assignment, the soundness property will be decidable.
The following theorem may be proved (Gorbunov,
2006).
Theorem 2.1 If a free-choice WF-net N = (P,T,R)
is sound, the WF-net N
0
with priorities: N
0
=
(P
0
,T
0
,R
0
,Pr
0
): P
0
= P, T
0
= T,R
0
= R, ∀t
0
i
,t
0
j
∈ T
0
:
t
0
i
SCt
0
j
⇒ Pr(t
0
i
) = Pr(t
0
j
) with the same initial mark-
ing m
0
i
= m
i
is sound.
2.2 Stochastic Petri Nets
Tokens have time stamps that denotes time when to-
ken will be available for transition execution. While
executing, transitions assign time stamps to the pro-
duced tokens.
Definition 2.2 (Stochastic Petri net with priorities)
A stochastic Petri net with priorities N ∈ SPN
e
is a
tuple (P,T,R,W,Pr):
• (P,T,R, Pr) – free-choice PN
pr
net;
• W ∈ T → R
+
.
There exist two types of transitions: timed and
immediate. A transition t is a timed transition iff
Pr(t) = 0 and is an immediate transition otherwise.
Firing of immediate transitions takes no time.
Delays of timed transitions are defined by the neg-
ative exponential probability function. For timed
transitions W defines the rate of executions, i.e.
the parameter of negative exponential probabil-
ity function of the delays: ∀t ∈ T,Pr(t) = 0 :
P{delay of execution of t ≤ x} = 1− e
−W(t)x
.
For immediate transitions W is used for resolving
conflicts between transitions.
For SPN
e
-net N = (P, T,R,W,Pr) timed state
space S ⊆ P → (R → N) is defined. For timed state
s ∈ S for any p ∈ P,s(p) is multiset on R. Timed state
defines for any place p the number of tokens and their
time stamps.
If in a timed state s we abstract from token time
stamps, we obtain marking s
m
as in ordinary Petri
RESOURCE MANAGEMENT FOR ONE CLASS OF WORKFLOW PROCESSES - A Stochastic Petri Net Based
Approach
169

nets. Function U
t
() makes an appropriate transforma-
tion:
Definition 2.3 (Function U
t
())
∀p ∈ P : U
t
(s, p) = |s(p)|.
So, s
m
= U
t
(s).
For SPN
e
-nets some initial timed state m
0
∈ S is
fixed.
Function first() for timed state s ∈ S and position
p ∈ P returns the minimal time stamp of tokens in p:
first(s(p)) = min({k ∈ R|s(p)(k) > 0}).
Definition 2.4 (Function ttime(s,t))
∀s∈ S,t ∈ T ttime(s,t) =
max
p∈
•
t
{ first(s, p)},
if t ∈ E
t
(U
t
(s));
not defined otherwise .
Function ftime() for timed state s ∈ S returns first
moment of time, when some transition in E
t
(U
t
(s))
can fire:
ftime(s) = min
t∈E
t
(U
t
(s))
ttime(s,t).
Here E
t
is function that for any marking of Petri net
returns the set of active transitions.
Definition 2.5 (Function fire()) Function fire() re-
turns the set of transitions, that can fire in timed state
s ∈ S:
fire(s) = M
pr
({t ∈ E
t
(U
t
(s))|
ttime(s,t) = ftime(s)}).
If t ∈ fire(s), it can fire at the timed state s.
If fire(s) consists of some transitions, they have
the same priority value. It can be shown, that
the set of fire(s) is empty or consists of sets
SC
a1
,SC
a2
,. ..,SC
ap
with the same priority value.
Suppose fire(s) = SC
a1
,SC
a2
,. .., SC
ap
.
The probability of firing the transition t
b
∈ fire(s)
is defined by its relational weight among other transi-
tions from fire(s):
P{t
b
will fire in s} =
W(t
b
)
∑
u∈ fire(s)
(W(u))
,
if t
b
∈ fire(s)
0, otherwise.
(1)
When a transition t is firing, tokens with the small-
est time stamps are removed from its input places and
tokens with time stamps equal to the moment of firing
increased by the firing delay d are added to its output
places. Firing delay d is sampled from the probability
function associated with the delay of transition. The
new timed state obtained from timed state s ∈ S by
firing the transition t ∈ T with delay d ∈ R, is defined
by the function g:
g(s,t,d)(p) =
s(p), if p /∈
•
t and p /∈ t
•
s(p) − [ first(s(p))],
if p ∈
•
t and p /∈ t
•
s(p) + [ ftime(s) + d],
if p /∈
•
t and p ∈ t
•
s(p) − [ first(s(p))]+
[ ftime(s) + d],
if p ∈
•
t and p ∈ t
•
.
2.3 Stochastic Workflow Nets
(SWF
e
-nets)
A SWF
e
-net N is a tuple (P, T,R,W,Pr):
• (P,T,R) is a WF-net;
• (P,T,R,W,Pr) is a SPN
e
-net.
For the SWF
e
-net N = (P,T,R,W,Pr) the initial
timed state m
0
is defined as follows:
∀p ∈ P,m
0
(p) =
[0], if p = i
0, otherwise.
At the initial timed state m
0
the net contains one token
in the place i with the time stamp equal to 0, other
places don’t contain tokens.
2.4 Stochastic Resource-Constrained
Workflow Nets (SRCWF
e
-nets)
In this section a stochastic extension for RCWF-
nets (K.M. van Hee, 2005) is proposed. Stochas-
tic RCWF-net (SRCWF
e
-net) N is a tuple (P
p
∪
P
r
,T, R
p
∪ R
r
,W,Pr):
• (P
p
∪ P
r
,T, R
p
,W,Pr) – SWF
e
-net;
• (P
p
∪P
r
,T, R
p
∪R
r
) – RCWF-net with places i and
f as source and sink places.
Denote P = P
r
∪ P
p
.
Definition 2.6 (Initial timed state) SRCWF
e
=
(P
p
∪ P
r
,T, R
p
∪ R
r
,W,Pr) with the timed state space
S, the initial timed state m
0
∈ S is defined as follows:
for p ∈ P,m
0
(p) =
[0] if p = i,
l[0] if p ∈ P
r
,
where l ∈ N, l > 0
/
0 otherwise.
In the initial timed state m
0
there is one token in
place i with time stamp 0 and some tokens in places
from P
r
. Places from P
r
(resource places) contain
multisets of tokens with time stamp 0. Every place
from P
r
denotes a resource class. The quantity of to-
kens in the resource position denotes the quantity of
resources of that class.
BMSD 2011 - First International Symposium on Business Modeling and Software Design
170

There are two possible classes of methods for
quantitative analysis of SRCWF
e
-nets: simulation
and analytical methods. Note, that analytical meth-
ods are applicable only for restricted subclasses of
SRCWF
e
-nets with additional constraints on struc-
ture, initial timed state and so on. In general, at
present, analytical methods are inapplicable for quan-
titative analysis (Gorbunov, 2005; Gorbunov, 2006).
3 RESOURCE MANAGEMENT
FOR ONE CLASS OF
SRCWF
E
-NETS
3.1 SRCWF
e1
s
-nets
Denote the set of transitions of the SRCWF
e
-net N
which have input places from P
r
as T
r
: T
r
= {t ∈
T|∃p ∈ P
r
: (p,t) ∈ R
r
}. Suppose, that all places
from P
r
have some names p
r1
,. .., p
rs
. Denote sub-
sets of t ∈ T
r
, such that (p
ri
,t) ∈ R
r
, as T
ri
. Sup-
pose that all transitions from T
ri
are denoted as
t
(ri)(1)
,t
(ri)(2)
,. ..,t
(ri)(n
i
)
, where |T
ri
| = n
i
.
We will use a special class of SRCWF
e
-nets (de-
note it SRCWF
e1
s
-nets) with some restrictions and
modifications.
The net N = (P
p
∪ P
r
∪ p
g
,T ∪ {t
i
,t
f
},R
p
∪ R
r
∪
{(t
i
,i), (t
i
, p
g
),(p
g
,t
i
),( f,t
f
)},W,Pr) is a SRCWF
e1
s
-
net, iff (P
p
∪P
r
,T, R
p
∪R
r
,W,Pr) – SRCWF
e
-net with
some restrictions:
1. the net (P
p
,T, R
p
) is a state machine non-cyclic
net;
2. in the net (P
p
,T, R
p
)∃t
l
,t
m
: t
l
∈ T
r
,t
m
∈ T,t
l
6=
t
m
,t
l
SCt
m
;
3. in the net (P
p
,T, R
p
,Pr) : ∀t
i
,t
j
∈ T : t
i
SCt
j
⇒
Pr(t
i
) = Pr(t
j
);
4. for any t ∈ T
r
: ∃!p
ri
∈ P
r
: (p
ri
,t),(t, p
ri
) ∈ R
r
;
5. for any t ∈ T
r
: (Pr(t) = 0);
Pr(t
i
) = 0, Pr(t
f
) = 1.
In other words, the transition t
i
is a timed transi-
tion and t
f
is an immediate transition.
The initial marking m
0
∈ S is defined as follows:
∀p ∈ P,m
0
(p) =
1[0], if p = i;
1[0], if p = p
g
;
l[0], if p ∈ P
r
,
where l ∈ N,l > 0;
/
0 otherwise
Note, that the transition t
i
will generate the pois-
son stream of tokens with the rate W(t
i
). After each
firing of t
i
place p
g
will contain one token with time
stamp increased by the sampled delay of t
i
.
The special transitiont
f
consumes tokens from the
place f. The value of W(t
f
) is of no importance and,
for certainty, let be 1.
Due to the constraints, if any resource position is
connected by the output (input) arc with some transi-
tion, such position must be connected with it by the
input (output) arc. At the same time this transition
cannot be connected with any other resource posi-
tions. In other words, a resource becomes free after
fulfilling the task (firing the transition). Obviously,
places from P
r
are bounded, moreover, at any reach-
able marking the number of tokens in any place from
P
r
is the same as in the initial marking.
All resource places are connected with timed tran-
sitions only. That is, if some resource is needed for
some task, this task must consume time. At the same
time, in the model there may be timed transitions
which are not connected with resource places. Such
transitions model some time delays which don’t de-
pend on resources and are defined by external factors.
Definition 3.1 (Function ttime
p
(s,t))
∀s∈ S,t ∈ T ttime
p
(s,t) =
max
p∈
•
t
P
p
{ first(s, p)},
if t ∈ E
t
(U
t
(s));
don’t defined
otherwise .
The function ttime
p
(s,t) for timed state s and po-
tentially active transition t ∈ T,t ∈ E
t
(U
t
(s)) result in
the moment of time when the transition t could fire, if
we abstract from places in P
r
.
Definition 3.2 (Waiting time) For SRCWF
e1
s
-
net (P
p
∪ P
r
∪ p
g
,T ∪ {t
i
,t
f
},R
p
∪ R
r
∪
{(t
i
,i), (t
i
, p
g
),(p
g
,t
i
),( f,t
f
)},W,Pr), that induces
the stochastic process π = {(X
n
,Y
n
)|n = 0,1,2, ... },
where X
n
is a timed state after n firings, Y
n
is a
transition that will fire at the state X
n
, define the
stochastic variable WT
t
( j), waiting time of transition
t ∈ T due to the lack of resources:
WT
t
( j) =
ttime(X
j
,Y
j
) − ttime
p
(X
j
,Y
j
),
if t = Y
j
,
is not defined otherwise.
WT
t
( j) equals the waiting time of firing of t due
to the lack of resources, when t fires in the state X
j
and is not defined otherwise. Denote by E(WT
t
) the
mathematical expectation ofWT
t
( j). Of course, there
must be some restrictions on functions W to obtain
finite values of E(WT
t
).
RESOURCE MANAGEMENT FOR ONE CLASS OF WORKFLOW PROCESSES - A Stochastic Petri Net Based
Approach
171
3.2 Soundness of the Nets Underlying
SRCWF
e1
s
-nets
Consider SRCWF
e1
s
-net N = (P
p
∪
P
r
∪ p
g
,T ∪ {t
i
,t
f
},R
p
∪ R
r
∪
{(t
i
,i), (t
i
, p
g
),(p
g
,t
i
),( f,t
f
)},W,Pr).
WF-net (P
p
,T, R
p
) is a state machine net. Hence,
WF-net (P
p
,T, R
p
) is sound.
Due to the structural constraints of SRCWF
e1
s
-nets
and theorem (2.1), Petri net (P
p
,T, R
p
,Pr) with prior-
ities is sound.
It is obvious that RCWF-net with priorities P
p
∪
P
r
,T, R
p
∪ R
r
,Pr is sound due to the structural con-
straints.
3.3 Problem Statement
Let N be a SRCWF
e1
s
-net. Denote PF ∈ T
r
→ R a
function that assigns for each timed transition from
T
r
some penalty for waiting per unit of time due to
the lack of resources. PF(t) may reflect the cost of
waiting or some measure of client dissatisfaction.
The problem is to minimize the function F:
F =
∑
t∈T
r
E(WT
t
)PF(t) → min. (2)
Another important characteristic of workflow pro-
cesses is throughput time (Reijers, 2003). Note that
it is possible to vary function F without changing
throughput time of the process.
3.4 Decision Approach
Let us introduce some transformation rule with
SRCWF
e1
s
-net N. Denote γ the maximum value of the
function Pr in N: γ = M
pr
(T). For every time transi-
tion t
(ri)( j)
∈ T
ri
add (in the set T) newimmediate tran-
sition t
0
(ri)( j)
: W(t
0
(ri)( j)
) = W(t
(ri)( j)
), PF(t
0
(ri)( j)
) =
PF(t
(ri)( j)
), Pr(t
0
(ri)( j)
) ∈ {1+ γ, 2+ γ,.. ., n
i
+ γ} and
the new place p
0
(ri)( j)
(in the set P
p
),
•
t
0
(ri)( j)
=
•
t
(ri)( j)
,
t
0•
(ri)( j)
= {p
0
(ri)( j)
},
•
t
(ri)( j)
= {p
0
(ri)( j)
}.
Denote the modified SRCWF
e1
s
-net N as N
f
. Note,
that N
f
is not a SRCWF
e1
s
-net. The set T
r
of the net N
f
consists of immediate transitions. This transforma-
tion rule preserves the soundness of RCWF-net with
priorities that underlies N
f
.
Now we obtain the possibility to change the value
of function F by changing the priorities of transitions
from sets T
ri
.
It may be shown that to obtain the same value of F
in the net N
f
, the priorities of transitions within each
set T
ri
must be the same (for example, 1+ γ).
In general, simulation may be used to obtain some
optimal result. In brute force approach, |T
r1
|
|T
r1
|
∗
|T
r2
|
|T
r2
|
∗ ... simulations may be carried out to ob-
tain some optimal result. Moreover, if some transi-
tions from some T
ri
have the same priority, the value
of function W may be changed to obtain the optimal
result.
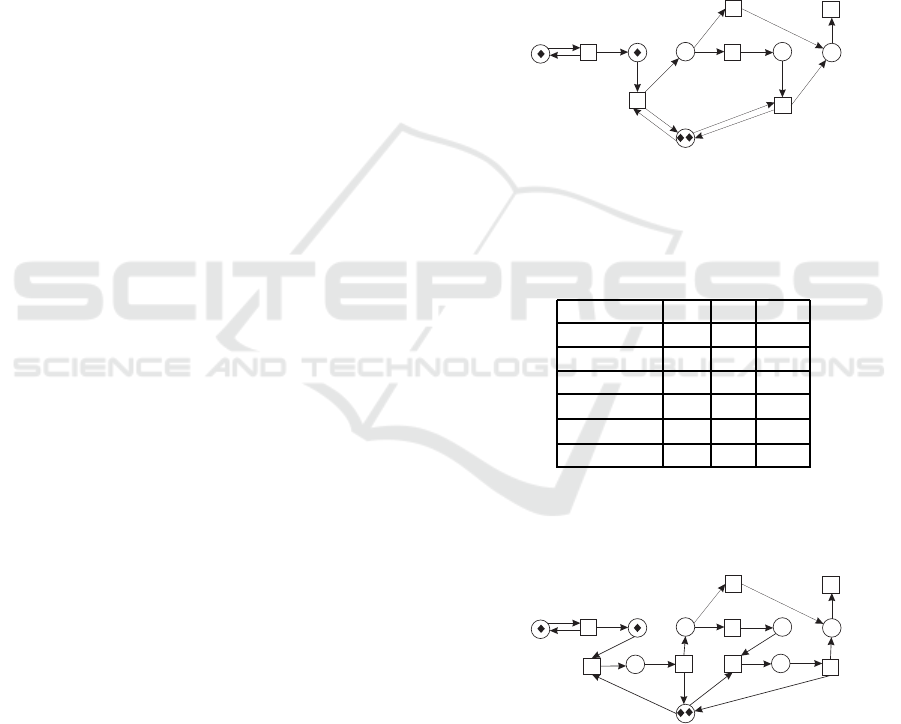
3.5 Example
Let us introduce an example that illustrates the
approaches discussed above. In Figure 1 some
SRCWF
e1
s
-net N is illustrated.
Pg
t i
i
t (r1)(1)
t (r1)(2)
P1
P2
t 1
t 2
f
t f
Pr1
Figure 1: SRCWF
e1
s
-net N.
The characteristics of the net N are specified in
Table 1.
Table 1: Characteristics of N.
Transition W Pr PF
t
i
10 0
t
1
0.2 1
t
2
0.8 1
t
(r1)(1)
20 0 50
t
(r1)(2)
30 0 100
t
f
1 1
By applying transformation rules from 3.4 the net
N
f
illustrated in Figure 2 is produced. Priorities of
transitions within set T
r1
are selected arbitrarily.
Pg
t i
i
t’ (r1)(1)
t (r1)(2)
P1
P2
t 1
t 2
f
t f
Pr1
P’ (r1)(1)
t (r1)(1)
t’ (r1)(2)
P’ (r1)(2)
Figure 2: The net N
f
obtained from N.
The characteristics of the net N
f
are specified in
Table 2.
BMSD 2011 - First International Symposium on Business Modeling and Software Design
172
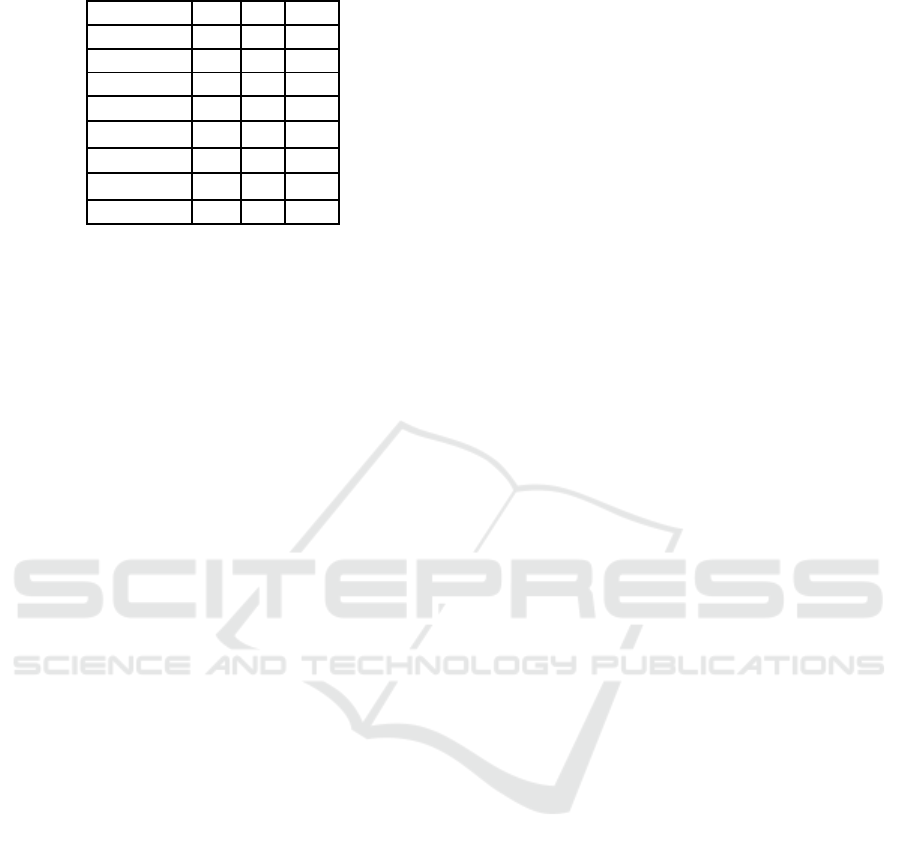
Table 2: Characteristics of N
f
.
Transition W Pr PF
t
i
10 0
t
1
0.2 1
t
2
0.8 1
t
(r1)(1)
20 0
t
0
(r1)(1)
20 2 50
t
(r1)(2)
30 0
t
0
(r1)(2)
30 3 100
t
f
1 1
4 CONCLUSIONS
This paper opens many ways for further work. One
way is to develop heuristic rules for assigning prior-
ities without simulation for some classes of nets and
functions F (may be not linear). The other way is
to weaken the constraints of SRCWF
e1
s
-net such as
the structural constraint of the state machine. Some
heuristic rules may also be developed to obtain values
of W for some T
ri
of the net N
f
in the case of deriving
transitions with the same priorities.
ACKNOWLEDGEMENTS
Authors appreciate prof. E.A. Timofeev for the useful
advices and discussion in the paper related topics.
REFERENCES
G. Florin, S. N. (1980). Evaluation based upon stochastic
petri nets of the maximum throughput of a full duplex
protocol. In C. Girault, W. R., editor, Applications and
Theory of Petri Nets, pages 280–288. Springer-Verlag.
Gorbunov, O. (2005). Optimisation of workflow processes
execution. Modeling and Analysis of Informational
Systems, 12(1):45–51.
Gorbunov, O. (2006). Modeling and Optimisation of Work-
flow Processes. Phd thesis, Yaroslavl State University,
Yaroslavl.
K.M. van Hee, A. Serebrenik, N. S. M. V. (2005). Sound-
ness of resource-constrained workflow nets. In Gia-
rdo, G. and Darondeau, P., editors, Applications and
Theory of Petri Nets 2005, volume 3536, pages 250–
267. Lecture Notes in Computer Science, Springer-
Verlag.
M.A. Marsan, G. B. e. a. (1985). On petri nets with stochas-
tic timing. In International Workshop on Timed Petri
Nets, pages 80–87. IEEE Computer Society Press.
M.A. Marsan, G. Balbo, G. C. (1984). A class of gener-
alised stochastic petri nets for the performance eval-
uation of multiprocessor systems. ACM Transactions
on Computer Systems, 2(2):93–122.
Merlin, P. (1974). A Study of the Recoverability of Com-
puter Systems. Phd thesis, University of California,
Irvine.
Ramchandani, C. (1973). Performance Evaluation of Asyn-
chronous Concurrent Systems by Timed Petri Nets.
Phd thesis, Massachusetts Institute of Technology,
Cambridge.
Reijers, H. (2003). Design and Control of Workflow Pro-
cesses. Springer-Verlag.
Sifakis, J. (1977). Use of petri nets for performance evalu-
ation. In H. Beilner, E. G., editor, Third International
Symposium IFIP. Measuring, modeling and evaluat-
ing computer systems, pages 75–93, Amsterdam. El-
sevier Science Publishers.
van der Aalst, W. (1993). Interval timed coloured petri nets
and their analysis. In Marsan, M., editor, Application
and Theory of Petri Nets, volume 691, pages 453–472.
Lecture Notes in Computer Science, Springer-Verlag.
van der Aalst, W. (1998). The application of petri nets to
workflow management. The Journal of Circuits, Sys-
tems and Computers, 8(1):21–66.
van der Aalst, W. (2000). Workflow verification: Find-
ing control-flow errors using petri net-based tech-
niques. Business Process Management. Lecture Notes
in Computer Science, 1806:161–183.
van der Aalst, W. and van Hee, K. (2002). Workflow Man-
agement: Models, Methods and Systems. MIT Press,
London.
PETRI NET BASICS
Definition 4.1 (Petri net) Petri net N is a tuple
(P,T,R), where
- P – finite set of places;
- T – finite set of transitions, (P∩ T =
/
0);
- R – flow relation, R ⊆ (T × P) ∪ (P× T).
We use
•
t to denote the set of input places of a
transition t: p ∈
•
t iff p ∈ R(p,t). t
•
have the similar
meaning: it is the set of output places of a transition
t: p ∈ t
•
iff p ∈ R(t, p).
Definition 4.2 (Petri net marking) The mark-
ing (state) m of Petri net N is a mapping m:
P → N. A marking is represented by the vector
(M(p
1
). .. M(p
n
)), where p
1
,. .., p
n
is an arbitrary
fixed enumeration of P.
Definition 4.3 (Firing rule) A marking m of a Petri
net (P, T,R) enables a transition t ∈ T if it marks every
place in
•
t. If t is enabled at m, then it can fire, and
RESOURCE MANAGEMENT FOR ONE CLASS OF WORKFLOW PROCESSES - A Stochastic Petri Net Based
Approach
173

its firing leads to the successor marking m
0
(written
m
t
→ m
0
) which is defined for every place p ∈ P:
m
0
=
m(p) if p /∈ t
•
and p /∈
•
t, or p ∈ t
•
and p ∈
•
t
m(p) + 1 if p ∈ t
•
and p /∈
•
t
m(p) − 1 if p /∈ t
•
and p ∈
•
t
Definition 4.4 (Free choice Petri net) Petri net N is
called a free choice Petri net, if for any transitions
t
1
,t
2
∈ T : if
•
t
1
∩
•
t
2
6=
/
0, then
•
t
1
=
•
t
2
.
Definition 4.5 (Structural conflict of transitions)
A structural conflict of transitions is a relation SC
on the set of transitions T: ∀t
i
,t
j
∈ T : t
i
SCt
j
iff
•
t
i
∩
•
t
j
6=
/
0.
BMSD 2011 - First International Symposium on Business Modeling and Software Design
174
