
EVENT DETECTION USING LOG-LINEAR MODELS FOR
CORONARY CONTRAST AGENT INJECTIONS
Dierck Matern, Alexandru Paul Condurache and Alfred Mertins
Institute for Signal Processing, University of Luebeck, Ratzeburger Allee 160, Lübeck, Germany
Keywords:
Event detection, CRF, MEMM, Graphical modeling.
Abstract:
In this paper, we discuss a method to detect contrast agent injections during Percutaneous Transluminal Coro-
nary Angioplasty that is performed to treat the coronary arteries disease. During this intervention contrast
agent is injected to make the vessels visible under X-rays. We aim to detect the moment the injected contrast
agent reaches the coronary vessels. For this purpose, we use an algorithm based on log-linear models that are
a generalization of Conditional Random Fields and Maximum Entropy Markov Models. We show that this
more generally applicable algorithm performs in this case similar to dedicated methods.
1 INTRODUCTION
Modern surgical treatment is often image supported.
For example, in Percutaneous Transluminal Coronary
Angioplasty (PTCA), cardiac X-ray image sequences
are used in the treatment of the coronary heart dis-
eases. During the intervention, a contrast agent is in-
jected into the vessels to make them visible and en-
able a balloon to be advanced to the place of the lesion
over a guide wire. Contrast agent is given in occa-
sional bursts, thus, the vessels are not constantly visi-
ble. To build a dynamic vessel roadmap (Condurache,
2008) that constantly shows the vessels during the
length of the intervention, we need to detect the mo-
ment the contrast agent reaches the vessels, that is,
the moment they become visible under X-rays. An
algorithm to detect this moment is discussed here.
Dedicated methods for this task can be found in
(Condurache et al., 2004; Condurache and Mertins,
2009). Here we introduce a more general event detec-
tion algorithm based on Log-Linear Models (LLMs)
which is closely related to Conditional Random Fields
(CRFs) (Wallach, 2004; Lafferty et al., 2001) and
Maximum Entropy Markov Models (MEMMs) (Mc-
Callum et al., 2000). Our goal is to show that CRF-
based event detection, as a general framework, is able
to solve event detection problems with accuracy sim-
ilar to or even better than dedicated methods for the
target application.
LLMs, especially CRFs and MEMMs, are finite
state models (Gupta and Sarawagi, 2005; Wallach,
2004; Lafferty et al., 2001; McCallum et al., 2000)
(a) (b)
Figure 1: Two example X-ray images without (a) and with
(b) contrast agent.
which are used for segmentation problems (McCal-
lum et al., 2000; Lafferty et al., 2001). For this task,
an existing, labeled data set is used to train the model.
Then the model is applied to new data sets to generate
a corresponding label sequence. For event detection
problems, the event is usually unknown, thus we have
no labeled data for the events. Therefore, the usual
training algorithms for CRFs (Gupta and Sarawagi,
2005) do not apply. An approach when we have partly
labeled data (Jiao et al., 2006) is not suitable, because
it assumes at least some labels for each class.
MEMMs are Markov models with a maximum en-
tropy approach (McCallum et al., 2000; Gupta and
Sarawagi, 2005). From a graphical point of view,
they are directed models like Hidden Markov Mod-
els (HMMs). If the model is not directed, we have a
(linear chain) CRF. This is important for the applica-
tions: using a MEMM, the probability to observe a
special state depends only on the states before, while
in CRFs, it depends on the states before and after the
172
Matern D., Condurache A. and Mertins A. (2012).
EVENT DETECTION USING LOG-LINEAR MODELS FOR CORONARY CONTRAST AGENT INJECTIONS .
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 172-179
DOI: 10.5220/0003774101720179
Copyright
c
SciTePress
100 200 300
50
100
150
Frame n
y
0
(n) (unfiltered)
100 200 300
50
100
150
Frame n
y(n) (filtered)
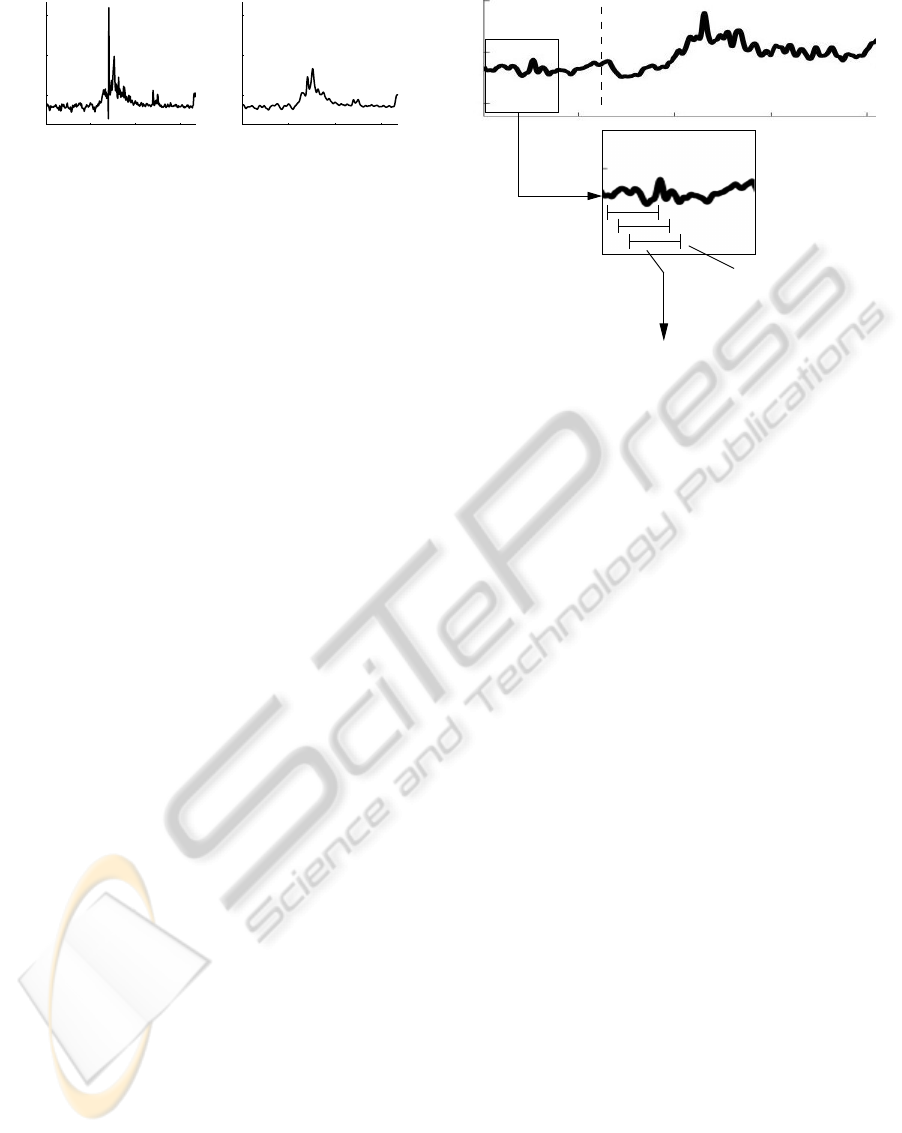
Figure 2: Original vessel feature curve (left hand side) and
the filtered histogram feature curves (right hand side).
actual state. Hence, in MEMMs, we pass forward in-
formation, while in CRFs, the information is passed
forward and backward. This has two important con-
sequences: (i) the usage of CRFs is more accurate
because we use more information for each time step,
and (ii) we cannot apply it for online problems, be-
cause we have to measure the whole data sequence
before the inference. The method we describe here is
a trade of of both approaches. We use several frames
for the inference for a more accurate decision, while
getting only a short and adjustable delay.
We describe a new method to extend the training
algorithm such that we can use an LLM for event de-
tection. We call this the Event Detection Log-Linear
Model (edLLM). This model gives us the opportunity
to conduct the event detection in a more sophisticated
manner, respecting that the normal case may consist
of several characteristics. Furthermore, we introduce
new methods to conduct the inference.
The rest of the paper is structured as follows. In
Section 2, we discuss the features we extract for the
event detection, the model and the test procedure. In
Section 3, we present the results of the experiments.
In Section 4, we give a short conclusion.
2 FEATURE EXTRACTION AND
MODEL DESCRIPTION
From X-ray images, we extract scalar features that
build a feature curve when considering an entire se-
quence. This is afterwards windowed and trans-
formed into a sequence of feature vectors that we use
for event detection. For this purpose, we introduce the
edLLMs, and discuss the training and inference.
2.1 Feature Extraction
From each X-ray image we extract a vessel feature,
sensitive to vessel only. First, a vessel-map showing
contrast-enhanced vessels is computed (Condurache
and Mertins, 2009). Afterwards we compute the the
vessel feature as the 98 percentile of the vessel-map’s
gray level histogram. Because this results in a scalar
Extraction,
normalization
Inference
... ,
x(n − 1)
,
x(n)
,
x(n + 1)
, ...
Training
y(n + 1),...,y(n + T )
Figure 3: Schematic representation of the feature extrac-
tion process. Short sequences of the vessel feature curve
are selected, using a sliding window with T − 1 overlap.
From each short sequence y(n + 1),y(n + 2) ..., y(n + T ),
we extract a normalized feature vector x(n). This results in
a sequence of feature vectors, which we analyze with the
edLLM.
value for each frame, for a sequence of X-ray images
this results in a one dimensional sequence of features,
that we call a vessel feature curve. Further, to reduce
noise, an adaptive filter is applied to this histogram
feature curve. This filter is defined as follows (Con-
durache et al., 2004; Condurache and Mertins, 2009).
Let y
0
(n) ∈ R be the unfiltered vessel feature, then the
filtered vessel feature y(n) is
y(n) := f (n)y
0
(n) + (1 − f (n))y(n − 1), (1)
f (n) :=
c ∈ [0, 1) if y
0
(n) − y
0
(n − 1) ≤ 3
ˆ
σ
1 otherwise,
where
ˆ
σ is the estimated standard deviation of the first
unfiltered vessel features. This filter smoothes only on
stationary intervals. Examples of the unfiltered and
filtered curves can be seen in Figure 2. A detailed de-
scription how this features are extracted can be found
in (Condurache et al., 2004; Condurache and Mertins,
2009).
2.1.1 Feature Vectors
We analyze the data batch-wise. Each batch consid-
ers several vessel features corresponding to a spe-
cific portion of the feature curve. This portion is
selected by means of a sliding window of length T
with T − 1 overlap. Therefore, a batch is given by
y(n),y(n + 1),...,y(n + T − 1), one corresponds to
one frame. For each frame we than compute a feature
EVENT DETECTION USING LOG-LINEAR MODELS FOR CORONARY CONTRAST AGENT INJECTIONS
173

vector x(n) that is related to the mean, curvature and
slope in each batch. An ordered set of feature vectors
is a feature vector sequence. A decision is returned
for each feature vector and thus for each frame of the
video sequence, starting at frame T . In the following,
we will discuss the components of the feature vec-
tor by introducing the functions used to compute the
mean, curvature and slope. These features are general
enough to be applicable to many different time series
describe local properties of the vessel feature curve.
A schematic representation of the feature extraction
process can be seen in Figure 3.
We also normalize the feature vectors to reduce
the influence of outliers. We call a vessel feature out-
lier if it is either very large or small in comparison to
both, the previous and next vessel feature on the fea-
ture curve. The filter in (1) removes most of the rel-
atively smaller outliers, thus we only need to remove
very large ones.
2.1.1(a) Mean. The first two components of the fea-
ture vector are related to the mean of the feature curve.
Let α and β be two scalars with α, β ∈ (0, 1). Then
µ(n+1) := αµ(n) + (1 −α)
∑
T −1
m=0
y(n+m) is a slowly
adapting mean value, and ν(n + 1) := βν(n) + (1 −
β)µ(n) a fast adapting one. We call them “mean val-
ues” because for stationary signals, the adapting mean
values converge to the mean of the signal with in-
creasing T . α and β are adaptation rates and depend
on the frame rate of the analyzed video. Further, let
d
n
(m) := y(m) − µ(n) and
˜
d
n
(m) := y(m) − ν(n) be
differences to those mean values and a vessel feature.
We want to compare the mean value of a batch to
the adapting mean values. The first two components
of the feature vector are
ξ
1
(n) :=
1 −
s
∑
T −1
m=0
d
n
(m + n)
2
2 · T ·
ˆ
σ
2
· 10,
ξ
2
(n) :=
1 −
s
∑
T −1
m=0
˜
d
n
(m + n)
2
5 · T ·
ˆ
σ
2
· 10,
where
ˆ
σ
2
is the estimated variance of the training
data. These functions are positive if the mean of the
batch is close to the adapting mean values, and neg-
ative otherwise. The scaling within the roots control
what we call “close”. The factor 10 is to emphasize
these features, because they act in a manner similar
to the statistical test used in (Condurache et al., 2004;
Condurache and Mertins, 2009).
2.1.1(b) Curvature. We extract features related to the
curvature. These features are computed as the differ-
ence of each element of a batch to the mean of a batch.
The next T components of the feature vector are:
ξ
2+k+1
(n) := y(n + k) −
1
T
T −1
∑
m=0
y(n + m),
for k = 0,1,2,...,T − 1.
2.1.1(c) Slope. The last L components of the
feature vectors are used to measure the slope of
a batch. We define the slope of a batch as
the slope of its linear regression, that is
ˆ
b(n) :=
arg min
b∈R
∑
T −1
m=0
(y(n + m) − y(n) − b · m)
2
.
For each batch, we compare these slopes to a set
of L sample slopes. Let b
min
be the minimal slope that
is observed in the training batches, and b
max
the max-
imal slope. Then a sample slope w
l
, l = 1,2,...,L, is
defined as w
l
:=
L−l
L−1
b
min
+
l−1
L−1
b
max
. The function we
use to compare slopes of batches to the sample slopes
is
ξ
2+T +l
(n) := 1 −
ˆ
b(n) − w
l
w
l+1
− w
l
!
2
for l = 1,2,...,L. This function is positive if a new
slope is close to the respective sample slope, and neg-
ative else.
2.1.1(d) Outliers. For each batch y(n),y(n +
1),...,y(n + T − 1), we have defined a vector ξ(n) :=
[ξ
i
(n)]
N
i=1
with N = 2 + T + L. The functions
ξ
1
,ξ
2
,...,ξ
N
describe properties of each batch, but
are affected by outliers. Let v(n) :=
∑
T −1
m=1
(y(n +m)−
y(n + m − 1))
2
be the (unnormalized) local variation.
Then, the normalized outlier-robust feature vector is
x(n) :=
1
v(n)
ξ(n). We call x(n) the feature vector at
lag n.
This local variation increases in the presence of
large outliers. This normalization does not remove
the possibility to detect events in the feature vector
sequence, because we assume that any real event is
visible for several successive frames.
2.2 Event Detection Log-linear Model
In the last section, we have described the how to gen-
erate the feature vector sequence x. In this section, we
describe the edLLM in detail. We first introduce the
edLLM in Section 2.2.1 and describe the training and
inference afterwards.
2.2.1 Model Description
We propose a LLM that is specialized on event de-
tection. These models process sequences of data in a
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
174

manner similar to CRFs and MEMMs. The sequence
we use here is the sequence of feature vectors.
Let x with x(n) ∈ R
N
be a feature vector se-
quence and s a corresponding state sequence, with
s(n) ∈ {ζ
0
,ζ
1
,ζ
2
,...,ζ
K
}. We use the convention that
the states ζ
1
,ζ
2
,...,ζ
K
describe the normal case, and
ζ
0
the event, that is in our case the occurrence of the
contrast agent. The training data includes no events:
s(n) 6= ζ
0
. Using several states for the normal case,
we obtain a highly descriptive model that covers the
various cases of what is defined to be normal.
For our purpose, we need now to link the training
data to the states of the normal case. This is an unsu-
pervised classification problem, as we need to assign
each feature vector from the training data one label
from the set {ζ
1
,ζ
2
,...,ζ
K
}. Let y
min
be the mini-
mum vessel feature in the training data and y
max
be
the maximum one. We define a
q
:=
K−q+1
K
y
min
+(1 −
K−q+1
K
)y
max
for q = 1, 2, . . . , K + 1, and we label the
training data by s(n) = ζ
q
if a
q
≤
1
T
∑
T −1
m=0
y(n + m) <
a
q+1
.
The idea of the edLLM is to label a feature-vector
sequence of a certain length at once. As each feature
vector is computed from a batch of vessel features, we
use then a larger context for improved decision. We
determine the probability of a state sequence, given a
sequence of feature vectors, similar to CRFs (Gupta
and Sarawagi, 2005). As a difference to CRFs, we
work with sequences of feature vectors, that we define
with the help of a sliding window. Thus we can use
this algorithm online. For the training, however, we
use the whole training data in a single sequence of
feature vectors. he training is conducted in the same
way as for CRFs and MEMMs, except for the penalty
term as described in Section 2.2.2.
2.2.1(a) Log-linear model. Let M ∈ N be the length
of a feature vector sequence x
i
and t
i
∈ N
0
be a
starting index of this sequence, i = 0,1,... where
i = 0 denotes the training data. For a shorter notation,
let x
i
:= [x(t
i
+ m)]
M
m=1
. We do the same with the
states: s
i
(m) := s(t
i
+ m) and s
i
:= [s
i
(m)]
M
m=1
. The
probability of s
i
, given x
i
and s
i
(0) is defined by
(Gupta and Sarawagi, 2005)
p(s
i
|x
i
,s
i
(0)) :=
exp
M
∑
m=1
λ
>
Φ(s
i
(m − 1), s
i
(m),x
i
,m)
Z(x
i
)
. (2)
Z(x
i
) is a normalization value such that p(s
i
|x
i
,s
i
(0))
is a probability. λ is a weighting vector that identifies
features that are important for a successful description
of the normal case. The function Φ establishes the re-
lationship between the feature vectors and the states.
It is defined by
Φ(s
1
,s
2
,x
i
,n) :=
[x
i
(n) · [[s
2
= ζ
k
]]]
K
k=1
h
[[[s
1
= ζ
j
]] · [[s
2
= ζ
k
]]]
K
j=1
i
K
k=1
x
i
(n) · [[s
2
= ζ
0
]]
. (3)
with x
i
(n) ∈ R
N
, Φ(s
1
,s
2
,x
i
,n) ∈ R
(N+1)K+K
2
. [[P]] =
1 if the predicate P is true and 0 otherwise (Gupta
and Sarawagi, 2005). For each sequence i, we need
an initial label s
i
(0) = s(t
i
). For the training data
(that is, i = 0), we have no information about s
0
(0) =
s(0), so we use an arbitrary symbol such that s(0) /∈
{ζ
0
,ζ
1
,...,ζ
K
} (Gupta and Sarawagi, 2005). For
i = 1, the initial label is s
1
(0) = s(t
1
). This is one of
the labels used for the training. For i > 1, s
i
(0) = s(t
i
)
is determined by the inference at this time step.
2.2.1(b) Example. Assume we have only 2D fea-
ture vectors (N = 2) and a sequence of length M = 2
for some i with i > 1, x
i
(1) = [a,b]
>
and x
i
(2) =
[c,d]
>
. Further, assume we have K = 2, that is,
s
i
(n) ∈ {ζ
0
,ζ
1
,ζ
2
}, n = 1,2. Note that with this pa-
rameters, (K + 1)
M
= 9 sequences are possible. We
assume that the first label is ζ
1
, and then we build our
example for all possible length 2 sequences.
Using the definitions above, Φ(ζ
1
,ζ
1
,x
i
,1) =
[a,b,0,0,0,0,0,0,0,0]
>
, and Φ(ζ
1
,ζ
1
,x
i
,2) =
[c,d, 0, 0, 1, 0, 0, 0, 0, 0]
>
. The fifth entry of
Φ(ζ
1
,ζ
1
,x
i
,1) indicates the “transition” from state ζ
1
to ζ
1
(the systems stays in state 1). The first two en-
tries are x
i
(1). If we use the state sequence [ζ
1
,ζ
2
]
>
,
then Φ(ζ
1
,ζ
2
,x
i
,2) = [0,0,c,d,0,1,0,0,0,0]
>
,
so the third and fourth entry of Φ(ζ
1
,ζ
2
,x
i
,1)
are x
i
(2). The sixth entry of Φ(ζ
1
,ζ
2
,x
i
,1) is
1, due to the transition from ζ
1
to ζ
2
. If we as-
sume an event at lag two, that is s(2) = ζ
0
, then
Φ(ζ
1
,ζ
0
,x
i
,2) = [0, 0, 0, 0, 0, 0, 0, 0, c, d]
>
.
We further assume that the weighting vector is
λ = [λ( j)]
10
j=1
] = [1, −1, −1, 1, 1, 0.5, 0.5, 1, 1, 1]
>
.
Then, according to Equation (2), we compute the
unnormalized probability as
˜p(s|x
i
,s(0)) =
exp
2
∑
m=1
λ
>
Φ(s(m − 1), s(m), x
i
,m)
!
. (4)
s(0) is some arbitrary symbol such that
s(0) /∈ {ζ
0
,ζ
1
,ζ
2
}. Hence, ˜p([ζ
1
,ζ
1
]
>
|x
i
,s(0)) =
exp(λ
>
Φ(ζ
1
,ζ
1
,x
i
,s(0))) = exp(a − b + c − d + 1) =
EVENT DETECTION USING LOG-LINEAR MODELS FOR CORONARY CONTRAST AGENT INJECTIONS
175

exp(a − b) · exp(c − d + 1). For the second ex-
ample sequence, ˜p([ζ
1
,ζ
2
]
>
|x
i
,s(0)) = exp(a −
b + d − c + 0.5) = exp(a − b) · exp(d − c + 0.5).
The unnormalized probability of an event at lag
two is ˜p([ζ
1
,ζ
0
]
>
|x
i
,s(0)) = exp(a − b + c + d) =
exp(a − b) · exp(c + d).
Now we want to decide which of these state se-
quences provides the highest probability. If c >
d − 0.25 and d < 0.5, the most probable sequence is
[ζ
1
,ζ
1
]
>
. If c < d − 0.25 and 0.25 > c, it is [ζ
1
,ζ
2
]
>
,
otherwise, it is [ζ
1
,ζ
0
]
>
. In this case, we have ob-
served an event at lag two. Note that these limits de-
pend on the weighting vector λ which includes a scal-
ing.
In this example, we can interpret λ as follows.
The first N = 2 entries of λ describe the state ζ
1
,
that means, a positive value “prefers” a corresponding
positive value in x
i
(if an entry in λ is positive and the
corresponding one in x
i
too, the probability for this
state is higher than otherwise), a negative in λ a neg-
ative one in x
i
; a zero in λ can be interpreted as “no
influence” on the probability. The next N entries de-
scribe the state ζ
2
. The next K
2
= 4 entries describe
the transition probabilities between the normal case
states. The last N entries describe the event.
2.2.2 Parameter Estimation
The weighting vector λ is estimated in the training
phase. During training, we maximize p(s
0
|x
0
,s(0))
(see Equation (2)) with respect to λ, given the train-
ing data and a corresponding state sequence, where
x
0
is the training data and s
0
the corresponding label
sequence.
Let t
0
be the start index of the training data (i.e.,
t
0
= 0) and M
0
the number of training feature vectors.
Then, we obtain
Φ(s
0
,x
0
) :=
M
0
∑
m=1
Φ(s
0
(m − 1), s
0
(m),x
0
,m).
In the training phase, we optimize L
λ
, the pe-
nalized log-likelihood of p(s
0
|x
0
,s(0)) (Gupta and
Sarawagi, 2005), defined as
L
λ
:= log(p(s
0
|x
0
,s(0))) − F(λ)
= λ
>
Φ(s
0
,x
0
) − log Z(x
0
) − F(λ), (5)
where F(λ) :=
||Dλ||
2
2
−
˜
e
>
λ with
˜
e := [ ˜e
k
]
(N+1)K+K
2
k=1
,
and
˜e
k
:=
M
0
∑
i=1
[[s(i) 6= ζ
j
]] if ( j − 1) · N < k ≤ j · N,
0 otherwise.
F(λ) is the penalty term. It is necessary for two
purposes: to avoid overfitting (Gupta and Sarawagi,
2005), and to adapt the training to our event detection
setup. For the former purpose,
˜
e compensates the dif-
ferent numbers of training vectors for each state. For
the latter purpose, we define the penalty matrix D by
D := [D(i, j)]
(N+1)K+K
2
i, j=1
with
D(i, j) :=
1 if i = j, i, j ≤ N · K + K
2
N
2N+1
if i = j, i, j > N · K + K
2
1
2N+1
if i 6= j, i, j > N · K + K
2
1
N
if i = k · j + N · K + K
2
,
k = 1,2,...,K,
0 otherwise.
We use this penalty matrix in contrast to how training
is conducted for usual LLMs (Gupta and Sarawagi,
2005; Lafferty et al., 2001) because we assume that
we cannot train for ζ
0
in a direct manner, as the
training data x
0
does not include any events, that is
s
0
(m) 6= ζ
0
, m = 1, 2, . . . , M
0
.
Because we want to determine λ such that the
penalized log-likelihood (see Equation (5)) is maxi-
mized, the training of the edLLM is an optimization
problem. The gradient of the penalized log-likelihood
is
∇L
λ
= Φ(s
0
,x
0
) − E(s|x
0
,λ) − Dλ +
˜
e,
where E(s|x
0
,λ) is the expected value of the sequence
s, given x
0
and λ. An efficient algorithm to com-
pute E(s|x
0
,λ) can be found in (Gupta and Sarawagi,
2005). The training processes in several iterations. At
iteration τ, λ is updated by λ
(τ+1)
:= λ
(τ)
+0.3·∇L
λ
(τ)
.
The constant 0.3 in the update of λ is selected empir-
ically.
2.2.3 Inference
With a trained model, we want to determine the prob-
ability of a state sequence for a new feature vector se-
quence. For the event detection, the most interesting
task is to measure the probability to detect an event,
that is the probability that the state ζ
0
, appears in a
feature vector sequence.
As described before, i > 0 indicate the i-th feature
vector sequence of length M that we want to analyze,
with t
i
as its starting index. We analyze the whole se-
quence of feature vectors x batchwise to increase our
classification results. These feature vector sequences
x
i
do overlap by d vectors, because with d > 0, we
increase the classification results of later feature vec-
tor in each feature vector sequence x
i
. Because each
feature vector corresponds to a frame of the X-ray im-
ages, d is actually a delay. We also can set d = 0 if
we cannot accept one, with costs of precision.
For each feature vector sequence x
i
, we first want
to estimate a state sequence s
i
. An exhaustive search
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
176
for each possible state sequence corresponding to this
feature vector sequence is not feasible, because we
would have to test (K + 1)
M
different state sequences.
To circumvent this problem, we define a forward path
α
i,m
and a backward path β
i,m
(Gupta and Sarawagi,
2005) recursively by
α
i,m
(k) :=
1
Z
α
K
∑
j=0
α
i,m−1
( j) · exp(λ
>
Φ(ζ
j
,ζ
k
,x
i
,m)),
and
β
i,m
( j) :=
1
Z
β
K
∑
k=0
β
i,m+1
(k) · exp(λ
>
Φ(ζ
j
,ζ
k
,x
i
,m + 1)),
where m = 1, 2, . . . , M, Z
α
and Z
β
are constants such
that
∑
K
j=1
α
i,m
( j) =
∑
K
k=1
β
i,m
(k) = 1. α
i,m
(k) is the
probability that we observe ζ
k
at lag m in the feature
vector sequence x
i
, given the previous states, β
i,m
( j)
is the probability of state ζ
j
at lag m in the feature
vector sequence x
i
, given the following states. The
probability of state ζ
j
at time step m in x
i
is given by
p(s
i
(m) = ζ
j
|x
i
) :=
α
i,m
( j) · β
i,m
( j)
Z
α,β
, (6)
where Z
α,β
is a normalization constant such that
p(s
i
(m) = ζ
j
|x
i
) is a probability.
We use this forward-backward-algorithm to max-
imize the information we use for labeling, and there-
fore the reliability of the method. For the same pur-
pose, we also do not apply the inference of the feature
vector sequences independently. For the first feature
vectors of the sequence x
i+1
, we pass forward infor-
mation from x
i
which we have labeled before.
Assume we have calculated α
i,m
(k) and β
i,m
( j),
j, k = 1, 2, . . . , K. To initialize the inference on
the next feature vector sequence x
i+1
, we de-
fine the forward path initiation by α
i+1,0
(k) :=
p(s
i
(M − d) = ζ
k
|x
i
) and the backward path initiation
as β
i+1,M+1
( j) :=
1
K+1
. Now we can conduct the in-
ference on the feature vector sequence x
i
and use the
feature vectors of the sequences before without a new
labeling.
In the case of event detection, we are particularly
interested in the probability of the event state ζ
0
, that
is p(s
i
(m) = ζ
0
|x
i
) (see Equation (6)). We can assume
that we have detected an event if p(s
i
(m) = ζ
0
|x
i
) > θ
for some 0 < θ < 1. However, this method is very
sensitive to noise in the probability of the event state,
which can occur if the number of training feature vec-
tors is limited or the variation in the data is high. A
noise-robust method is discussed next.
x
1
x
2
x
3
...
Training Inference
x: ...
n
M
d
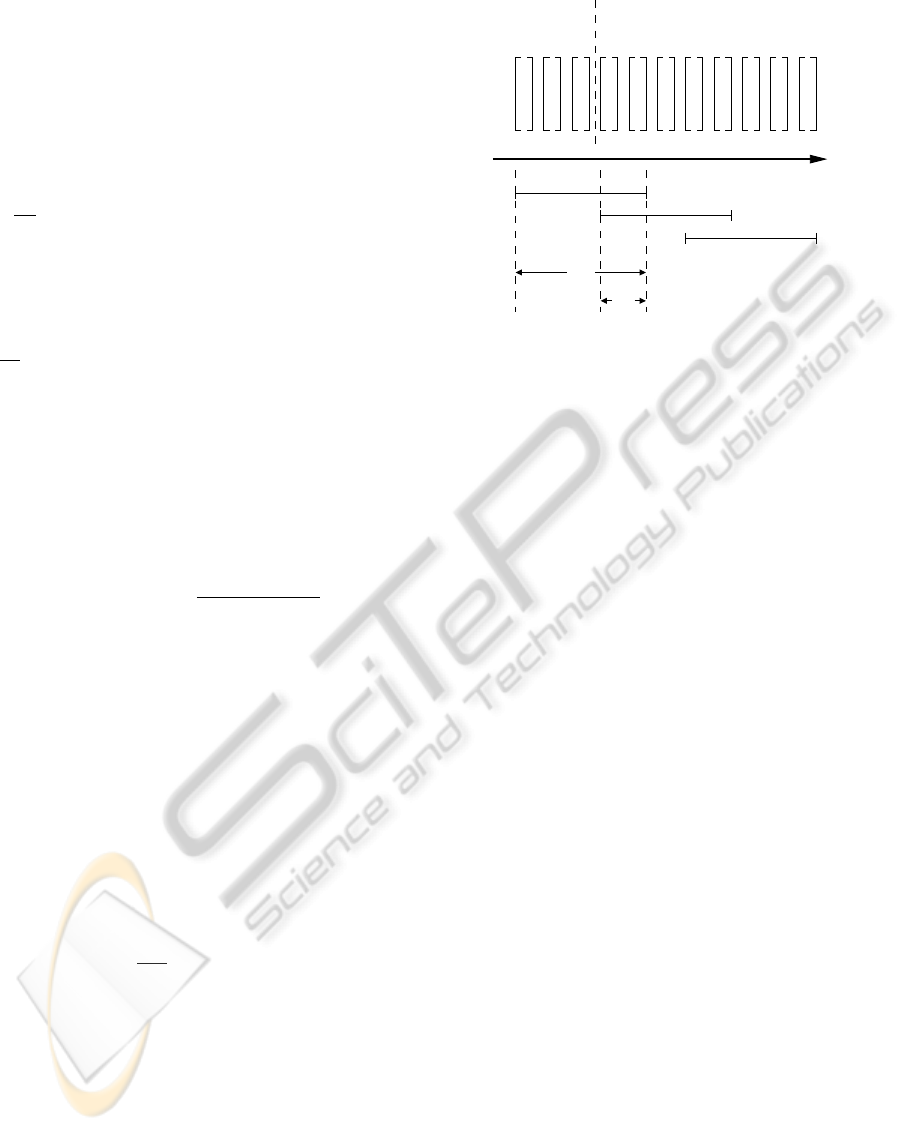
Figure 4: We apply the inference on short sequences of fea-
ture vectors, each of length M. These intervals overlap with
d feature vectors. Hence, d vectors are re-labeled, using
more feature vectors and therefore more information. The
first feature vector sequence x
1
is initialized to include sev-
eral features that belong to the training set.
2.2.3(a) CUSUM test. The probability for the obser-
vation of the event state ζ
0
in a feature vector se-
quence x
i
at lag m is p(s
i
(m) = ζ
0
|x
i
). We need an
interpretation of this probability. We use a Cumu-
lated Sum (CUSUM) test (Basseeville and Nikiforov,
1993) to decide if an event has occurred. For this pur-
pose, we define c(m) with
c(m) := c(m − 1) + p (s
i
(m) = ζ
0
|x
i
) − c
0
,
where c
0
is estimated such that c(m) ≤ 1 for m ≤ M
0
,
that is, we detect no event in the training data. An
event has occurred if c(m) > 1. We set c(m) to zero
either if an event has occurred or if c(m) ≤ 0.
3 EXPERIMENTS, RESULTS AND
DISCUSSION
We test our algorithm on the same X-ray image se-
quences used in (Condurache et al., 2004). Some ex-
amples are shown in Figure 1, and the vessel feature
curves in Figures 2 and 5.
For an event detection algorithm, the data provides
several interesting properties that make it challenging
and representative for other event detection problems.
First, it is generated by real measurements, no simu-
lation. Second, the state of the coronary arteries de-
pends on the heart beat, so a periodicity can be as-
sumed. Without it training could not be applied, be-
cause training data does not explain the normal case
in the inference. Further, the data depends on machine
settings and human interaction, so each sequence can
have very different statistical properties which are, in
EVENT DETECTION USING LOG-LINEAR MODELS FOR CORONARY CONTRAST AGENT INJECTIONS
177

fact, unknown. Our algorithm is a more general event
detection algorithm which can successfully analyze
very different time series.
We test the algorithm on nine different sequences
of vessel features. To evaluate our results we use the
same manual ground-truth proposed in (Condurache
et al., 2004). Note that this manual ground-truth is in-
fluenced by the quality of the X-ray images, the pre-
cise index of the frame where the contrast agent be-
comes visible is afflicted by small errors. Hence, we
rate the experiment as a success if the detection is be-
low 12 frames to the manual ground truth, that is one
second.
Because the data is measured in a surgical treat-
ment, the number is limited. To design the features,
we randomly have chosen three of the sequences, and
the tests are conducted on all nine sequences. As
discussed in 2.1, we use a sliding window of length
T = 36. We produce N = 41 dimensional feature
vector sequences, with L = 3 sample slopes w
l
. For
each of these feature vectors sequences, we train an
edLLM with K = 5 on the first M
0
= 64 feature vec-
tors. Therefore, the training sequence are the first 99
filtered histogram features (8.25 seconds). We tested
different numbers of feature vectors for the inference.
With M = 10 and a delay d = 2, we obtain the best re-
sults. Our method is robust with respect to the choice
of these parameters.
Our method is robust with respect to the choice of
these parameters. We have tested different parameters
(L from 3 to 9, T from 10 to 50) without noting any
significant change in the obtained results.
Our features are well suited to analyze curves such
as the vessel feature curve. Besides mean, curva-
ture and slope, we have also tested other features like
skewness or a direct quantization of the features and
obtained worse results. The feature vectors that are
introduced in Section 2.1.1 are effective for the event
detection. Not every component of the feature vec-
tors have the same influence on the results for every
sequence, but we could not reduce the feature vec-
tors without decreasing the results for at least one se-
quence.
In Figure 5, we can see several detection results.
Displayed are the manually labeled critical point and
the messured one, with both the algorithm proposed
in (Condurache et al., 2004) and the new proposal.
In six of the nine experiments, the automatically
detected events are below 12 frames (below one sec-
ond) to the manually ones, in two experiments the
events are detected too soon. Those two sequences
are contaminated by noise to such an amount that nei-
ther the adaptive filter nor our feature extraction can
deal with it.
200 400 600
35
40
45
50
55
event − estimated event: −6
dedicated method: 1
100 200 300
80
100
120
140
160
event − estimated event: −5
dedicated method: 0
50 100 150 200
60
80
100
event − estimated event: −1
dedicated method: −9
100 200 300
40
60
80
event − estimated event: −9
dedicated method: 0
100 200 300
50
60
70
event − estimated event: 35
dedicated method: not detected
20 40 60 80 100 120 140
0
50
100
event − estimated event: 4
dedicated method: −10
Figure 5: Several sequences of coronary contrast agent in-
jections: the vessel features (dark gray curve), the manually
selected critical point (dashed gray line), the detected event
(black dot) and the method provided in (Condurache et al.,
2004) (black cross) For the last test, the training for the nor-
mal case has been reduced to 60 frames because the contrast
agent has been injected too early.
4 SUMMARY AND
CONCLUSIONS
We have described an event detection method and ap-
plied it on the detection coronary contrast agent injec-
tions. The results are comparable or even better than
the dedicated method (Condurache et al., 2004; Con-
durache and Mertins, 2009; Condurache, 2008). Due
to the decision to analyze batches of frames rather
than each frame independently, it is not possible to
detect the contrast agent immediately, but after a few
frames, however, this lateness is below the human re-
action time. Further, we describe a general method
able to detect arbitrary events, not just the occurrence
of the contrast agent.
The edLLM is more adaptable than the dedicated
method. For example, it is not limited to the features
we use in Section 2.1. The training implicitly includes
a selection of good features, so the set of features
can be increased and adapted to more specific or even
totally different problems. The features we used in
this paper can be interpreted as a starting point: they
are general applicable and explain short sequences of
curves. More specialized features can be adapted, the
training or inference does not have to be altered.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
178

The delay d we include in our algorithm is used to
increase the precision of our labeling and is chosen
such that the classification is almost instantaneous.
Setting d = 0 eliminates the delay, bud decreases the
precision with which an event is detected. However,
this does not necessary afflict the detection of events
itself.
If we compare the edLLM to CRFs and MEMMs
from a theoretical point of view, we see a lot of sim-
ilarities. In fact, we can create a CRF and a MEMM
for the event detection by altering the length of the
window of feature vectors M and the delay d in the
inference. If M is equal to the whole sequence of fea-
ture vectors and d = 0, we have a CRF, that is, the
state sequence can be represented by an undirected
graph. If M = 1 and d = 0, we consider a MEMM. By
adapting the functions for the feature vectors and the
labeling for the training, we can adapt this method for
many other event detection problems, even to offline
problems using CRFs and online problems where we
can not accept a delay, using MEMMs.
REFERENCES
Basseeville, M. and Nikiforov, I. V. (1993). Detection of
Abrupt Changes: Theory and Application, page 35ff.
Prentice-Hall.
Condurache, A., Aach, T., Eck, K., and Bredno, J. (2004).
Fast Detection and Processing of Arbitrary Contrast
Agent Injections in Coronary Angiography and Fluo-
roscopy. In Bildverarbeitung für die Medizin (Algo-
rithmen, Systeme, Anwendungen), pages 5–9.
Condurache, A. P. (2008). Cardiovascular Biomedical
Image Analysis: Methods and Applications. GCA-
Verlag, Waabs, Germany. ISBN 978-3-89863-236-2.
Condurache, A. P. and Mertins, A. (2009). A point-event
detection algorithm for the analysis of contrast bolus
in fluoroscopic images of the coronary arteries. In
Proc. EUSIPCO 2009, pages 2337–2341, Glasgow.
Gupta, R. and Sarawagi, S. (2005). Conditional Random
Fields. Technical report, KReSIT, IIT Bombay.
Jiao, F., Wang, S., Lee, C.-H., Greiner, R., and Schuurmans,
D. (2006). Semi-supervised conditional random fields
for improved sequence segmentation and labeling. In
Proceedings of the 21st International Conference on
Computational Linguistics and the 44th annual meet-
ing of the Association for Computational Linguistics,
ACL-44, pages 209–216, Stroudsburg, PA, USA. As-
sociation for Computational Linguistics.
Lafferty, J. D., Mccallum, A., and Pereira, F. C. N. (2001).
Conditional random fields: Probabilistic models for
segmenting and labeling sequence data. In ICML ’01:
Proceedings of the Eighteenth International Confer-
ence on Machine Learning, pages 282–289, San Fran-
cisco, CA, USA. Morgan Kaufmann Publishers Inc.
McCallum, A., Freitag, D., and Pereira, F. C. N. (2000).
Maximum entropy Markov models for information
extraction and segmentation. In ICML, pages 591–
598.
Wallach, H. M. (2004). Conditional Random Fields: An
introduction. CIS Technical Report MS-CIS-04-21,
University of Pensilvania.
EVENT DETECTION USING LOG-LINEAR MODELS FOR CORONARY CONTRAST AGENT INJECTIONS
179
