
ACCURATE SIMILARITY MEASURES FOR SILHOUETTES
RECOGNITION
Saliha Aouat and Slimane Larabi
LRIA Laboratory, Computer Science Department,
University of Sciences and Technology – Houari Boumediene, Algiers, Algeria
Keywords: Textual Descriptors, Noise, Similarity Measures, Indexing, Recognition, Quasi-invariants, Parts Areas.
Abstract: In this paper, we propose a new method to recognize silhouettes of objects. Models of silhouettes are stored
in the database using their textual descriptors. Textual Descriptors are written following the part-based
method published in (Larabi et al, 2003). The main issue with the textual description is its sensitiveness to
noise, in order to overcome this issue, we have applied (Aouat and Larabi, 2010) a convolution to initial
outline shape with a Gaussian filter at different scales. The approach was very interesting for shape
matching and indexing (Aouat and Larabi, 2009), but unfortunately it is not appropriate to the recognition
process because there is no use of similarity measures in order to select the best model for a query
silhouette.
In this paper, we compute parts areas and geometric quasi-invariants to find the best model for the given
query; they are efficient similarity measures to perform the recognition process.
1 INTRODUCTION
There are two general methods for image matching,
retrieval and recognition: intensity-based (color and
texture) and geometry-based (shape), (Alvarado et
al, 2002; Arandjelovic and Zisserman, 2010; Chang
and Kimia, 2011; Keysers et al, 2007; Latecki et al,
2005; Ma and Latecki, 2011; Mokhtarian, 1995).
Our method is a geometry-based since we use
parts of 2D silhouettes, and an appearance-based
method, because we use different views of 3D
objects.
In this paper, we propose a new approach to
recognize descriptors of 2D silhouettes. The
silhouette is represented with a single closed contour
(Larabi et al, 2003). We used textual descriptors of
silhouettes for the matching and the indexing
processes (Aouat and Larabi, 2009). Due to noise,
the descriptors may be very different even though
the silhouettes look alike. Comparing such
silhouettes descriptors will result in a mismatch, for
this reason an algorithm was developed to smooth
the outline shapes (Aouat and Larabi, 2010).
In this paper, we assume that the smoothing and
the indexing processes were already performed
(Aouat and Larabi, 2010; Aouat and Larabi, 2009),
and we compute efficient similarity measures to
complete the recognition process.
The paper is structured as follows:
In the second section, we give an overview of the
outline shapes part-based method (Larabi et al,
2003). In the third section, we will explain the
necessity to compute similarity measures after the
indexing process. In the fourth section however, the
first similarity measure based on parts areas will be
presented, followed, in the fifth section, by the
second similarity measure based on Geometric
quasi-invariants, we will also validate the quasi-
invariants values we maintain for the recognition
process. In the last experimental section, we use real
images of two well known databases and discuss the
descriptors matching and recognition after applying
both similarity measures on textual descriptors of
used silhouettes.
2 TEXTUAL DESCRIPTION OF
SILHOUETTES
The part based method (Larabi et al, 2003) builds
shape descriptors by using the minimum rectangle
(MR) that encloses the outline shape (Graham,
1972). (OXY) is the referential attached to MR
chosen such as the origin O is the left top edge of
MR (see Figure 1).
397
Aouat S. and Larabi S..
ACCURATE SIMILARITY MEASURES FOR SILHOUETTES RECOGNITION.
DOI: 10.5220/0003815303970400
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 397-400
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Initial silhouette, the minimum rectangle MR,
and the rotated silhouette
From this geometric description, the outline shape
may be drawn without ambiguity implying the
propriety of uniqueness and preservation of
perceptual structure. The invariance of this
description to rotation is guaranteed by the sweep up
of the silhouette following one of the directions of
the minimum rectangle encompassing the silhouette.
For more details refer to (Larabi et al, 2003).
Textual descriptors of silhouettes are sensitive to
noise; indeed noise may modify and distorts the
outlines and their descriptors such as shown in
Figures 2 and 3.
Figure 2: A non-noisy silhouette and its decomposition.
Figure 3: A noisy silhouette and its decomposition.
The coarse descriptor of the silhouette in Figure
2 is:
<CP><CP>P1 P2 J1 P3</CP> D1 <CP>P4 D2 P8 P9</CP>
<CP> <CP>P5 P6 J2 P7</CP> D3 P10 P11</CP></CP>
while
the coarse descriptor of the silhouette in Figure 3
was:
<CP><CP>P1 P2 J1 P3 </CP> D1 P4 P5</CP>.
3 INDEXING PROCESS
The database of shapes models, represented by their
textual descriptors, is indexed using the following
data as shown in Figure 4:
The index is: (5, 1, 1, 01, 3, 3, wjjh&wjjw)
where: (5 is the number of parts, 1 is the number of
junction lines, 1 is the number of disjunction lines,
01 indicates that there is a junction line followed by
a disjunction line, 3, 3 indicate respectively that
there are three parts in relation with the first and the
second separating lines. The set of characters
wjjh&wjjw indicates that in the first separating line,
there are four segments with attributes w, j, j, h and
in the second separating line, there are four segments
with attributes w, j, j, w.)
Figure 4: Indexing a shape.
Different shapes may have the same index, the
difference between them is in the geometry of their
parts. In order to perform the full matching for the
recognition process, two similarity measures will be
used: the Parts Areas and the Geometric Quasi-
invariants.
4 PARTS AREAS
Let us consider the two curves f and g shown in
Figure 5. If f tends towards g (f ~ g) then the area
between f and the (OX) axis will be approximately
the same area as that between g and the (OX) axis.
In this case the difference between the two areas is
close to zero. As the shape is included into the
Minimum Rectangle (MR) which is the referential
OXY (see Figure 1), so all (OX) and (OY)
coordinates are positive therefore we can write:
b b
| ∫
a
f(x) dx - ∫
a
g(x) dx | ~ 0
All selected models after the indexing process,
will have the same index as the query, so they will
evidently have the same number of parts. The query
silhouette will be compared with all models of its
class that have the same index and the same number
of parts. The recognition aims to select the best
model which is close to the query.
Figure 5: Difference of areas between two curves.
The first step consists in reconstructing
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
398
silhouettes from their descriptors. In the second step,
we use the same referential for both query and
model silhouettes, this is possible due to the use of
the minimum rectangle as the referential. The last
step is the computation of the areas:
Let us consider two vectors V
q (Sq1,Sq2 ,…Sqn )
and Vm (Sm1,Sm2 ,…Smn) containing respectively
parts areas of the query and those of the model.
The first similarity measure between two
silhouettes is given by:
n
∑ (S
mi-Sqi)
2
i=1
where n is the number of parts of both
silhouettes. The best selected model is that which
minimizes this similarity measure.
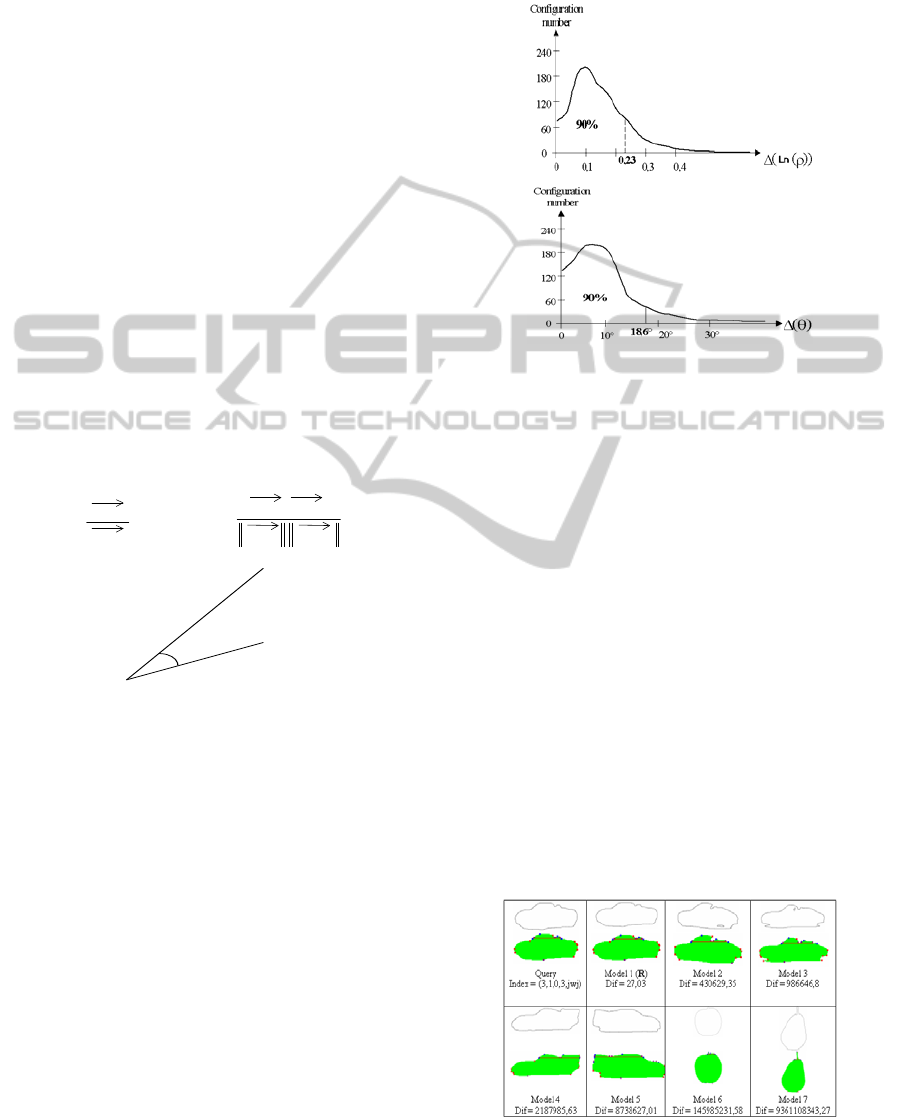
5 QUASI-INVARIANTS
The Geometric quasi-invariants (ρ, θ) are defined as
the angle θ between the intersecting segments, and
the segments length ratio ρ, (see Figure 6).
20
10
aa
aa
=ρ
2010
2010
.
.
arccos
aaaa
aaaa
=θ
θ
a
0
a
1
a
2
Figure 6: Geometric quasi-invariants (ρ , θ ).
The (ρ, θ) pairs found in each image vary
slightly with a small change in the viewpoint, and
are invariant under similarity transform of the image
(Gros, 1994; Lamiroy and Gros, 1996).
In order to study the variation of the pair (ρ, θ)
between successive segments, we considered, in an
offline study, 28 polyhydric objects and several
images (856 images) of each object taken under
different points of view (average object rotation is
20
0
). Identical views have been eliminated of the
image base to avoid redundancy. We then extract the
geometric features: that are the intersecting
segments and we analyze the similarities to
determine the similarities values. We use ln(ρ)
instead of ρ because ln(ρ) follows a uniform
distribution. For each two successive images of the
rotated object, we analyze identical geometric
configurations and evaluate the difference between
the quasi-invariants we extracted from. 90% of
configurations show (see Figure 7) a quasi invariant
distance less than: (
(
)
°=θ
=
ρ
61,18;23,0ln
)
Figure 7: Similarity of quasi-invariants.
6 EXPERIMENTATION
Experiments are done on two known databases
(Mokhtarian et al, 1996; Leibe and Schiele, 2003).
First we apply the smoothing process on the
outline shapes (Aouat and Larabi, 2010), then we
apply the part based method to obtain their textual
descriptors (Larabi et al, 2003). The second step is to
perform the indexing process which leads to
determine many classes; all objects of the same class
have the same index.
The first similarity measure is computed for each
model of each class (see examples in Figures 8 and
9). “Dif” is the difference of areas between the
model and the query. (Dif = |the area of the model-
the area of the query |). The symbol “R” means that
the model is recognized, so it verifies, also, the
second similarity measure. In case of many
recognized models, we sort them following parts
areas, in order to find the best model for the query.
Figure 8: Recognition of a car (from Leibe and Schiele
database).
ACCURATE SIMILARITY MEASURES FOR SILHOUETTES RECOGNITION
399

Figure 9: Second example in Mokhtarian database for the
recognition process.
7 CONCLUSIONS
In this paper, we proposed a new method for
silhouettes recognition. Textual description,
smoothing and indexing were previously performed
(Larabi et al, 2003; Aouat and Larabi, 2010; Aouat
and Larabi, 2009).
We have seen the importance of applying
efficient similarity measures to achieve the
recognition process.
Two similarity measures have been proposed:
- The use of parts areas: indeed when two
objects are almost similar, the difference
between their areas is close to zero. The use
of this measure is not sufficient because
different parts may have the same area.
- The computation of geometric quasi-
invariants in order to efficiently compare the
query silhouettes geometry with the models
geometry.
Conducted experiments, performed on two
known databases, showed the method efficiency
and its usefulness to resolve the problem of the
recognition process.
REFERENCES
Alvarado, C., Oltmans, M., Davis, R., 2002. A Framework
for Multi-Domain Sketch Recognition.
In the proc. Of
AAAI Spring Symposium on Sketch Understanding
.
Aouat S, Larabi S., 2009. Coarse Comparison of
Silhouettes using XLWDOS Language. Int. journal
for Computational Vision and Biomechanics
. Volume
2 Number 1.
Aouat, S., Larabi, S., 2010. Matching Descriptors of Noisy
Outline Shapes.
Int. Journal of Image and Graphics.
World Scientific Publisher.
Arandjelovic, R., Zisserman, A., 2010. Efficient image
retrieval for 3D structures. BMVC: 1-11.
Chang, M. C., Kimia, B. B, 2011. Measuring 3D shape
similarity by graph-based matching of the medial
scaffolds. CVIU 115(5): 700-720.
Chetverikov, D., 2003. A Simple and Efficient Algorithm
for Detection of High Curvature Points in Planar
Curves.
10th Int. Conference, CAIP, Netherlands,
August 25-27.
Graham, R. L., 1972. An efficient algorithm for
determining the convex hull of a finite planar set.
Information Processing Letters.
Gros, P., 1994. Using Quasi-Invariant for Automatic
Model Building and Object Recognition: An
Overview,
Proc. of the NSF-ARPA Workshop on
Object Representations in Computer Vision
, New
York, USA.
Keysers, D., Deselaers, T., Breuel, T. M., 2007. Optimal
geometric matching for patch-based object detection.
Electronic Letters on computer vision and image
analysis
, 6(1): 44-54.
Lamiroy, B., Gros, P., 1996. Rapid Object Indexing and
Recognition Using Enhanced Geometric Hashing. 4th
European Conference on Computer Vision
,
Cambridge, England.
Larabi, S., Bouagar, S., Trespaderne, F. M. , Lopez, E. F.,
2003. LWDOS: Language for Writing Descriptors of
Outline Shapes. In the LNCS proceeding of
Scandinavian Conference on Image Analysis
, June 29
- July 02, Gotborg, Sweden.
Latecki, L. J., Lakaemper, R., Wolter, D., 2005. Optimal
partial shape similarity.
Image and vision computing,
23(2): 227-236.
Leibe, B., Schiele, B., 2003. Analyzing Appearance and
Contour Based Methods for Object Categorization.
In
Int. Conference on Computer Vision and Pattern
Recognition
, Madison, Wisconsin.
Ma, T., Latecki, L. J., 2011: From partial matching
through local deformation to robust global shape
similarity for object detection. CVPR: 1441-1448.
Mokhtarian, F., 1995. Silhouette-Based isolated object
recognition through curvature scale space.
IEEE
Trans. on PAMI
, 17(5): 539-544.
Mokhtarian, F., Abbasi, S., Kittler, J., 1996. Efficient and
Robust Retrieval by Shape Content through Curvature
Scale Space.
In proc. of Int. Workshop on Image
Databases and Multimedia Search
, 35-42,
Amsterdam, The Netherlands.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
400
