
A KINECT-BASED AUGMENTED REALITY SYSTEM FOR
INDIVIDUALS WITH AUTISM SPECTRUM DISORDERS
Xavier Casas, Gerardo Herrera, Inmaculada Coma and Marcos Fernández
Institute of Robotics, University of Valencia, Valencia, Spain
Keywords: Augmented Reality, Motion Capture Systems, Autism Spectrum Disorders.
Abstract: In this paper an Augmented Reality system for teaching key developmental abilities for individuals with
ASD is described. The system has been designed as an augmented mirror where users can see themselves in
a mirror world augmented with virtual objects. Regarding the content the tool is designed with the aim of
facilitating the acquisition of certain skills in children with ASD. From a technical point of view, it has been
necessary to solve two problems to develop the tool. The first one has been how to capture the user’s
movements, without wearing invasive devices, to animate their virtual avatar. A Kinect device has been
chosen. The other problem has been to mix in the augmented virtual scene real objects located at different
depths. An OSG shader has been developed, of which details will given in this paper.
1 INTRODUCTION
Autism is a neuro-developmental disorder, and
individuals with Autism Spectrum Disorder (ASD)
have specific difficulties developing verbal and non-
verbal communication. They also have difficulties
socializing, a limited capacity for understanding
mental states, and a lack of flexibility of thinking
and behaving, especially when “symbolic play” is
involved.
While Virtual Reality has proven effective in
some people with autism (Stricklan, 1997; Herrera,
2008), there are still some more severely affected
individuals who are unable to generalize their
learning to new situations. In this sense, Augmented
Reality is directly related to reality and mixes
aspects of reality with computer-generated
information, so it does not require as much capacity
for abstraction as VR and people with autism who
do not have abstraction capacity could benefit from
their use (Herrera, 2006).
With regard to AR systems, researchers have
proposed solutions in many different application
domains. Some of them include applications
intended for young children (Berry, 2006;
Kerawalla, 2006), but a few of them are focused on
disabled children (Richard, 2007).
In this paper we present “Pictogram room”, a
project developed by the Orange Foundation that
intends to apply the latest technological advances of
Augmented Reality to benefit people with autism.
The goal of the project is to help the child to
improve critical abilities for his development. More
specifically, the aim is to teach the individual with
autism about self-awareness, body schema and
postures, communication and imitation by means of
an A.R. system.
Compared to other AR systems for individuals
with ASD, this application takes the users’ body
movements as a method for interaction. Thus,
moving their own body, children can play with the
AR system. The purpose of the application is to
teach the individual with ASD to develop his/her
body schema and, after this, to go through a series of
playful educational activities related to body
postures, communication and imitation. These
games show pictorial representations of various
elements, including avatars representing the child
and the teacher.
Therefore, our first task was to study existing
MoCap technologies used to control virtual avatars
with user’s movements, looking for the one that fits
better with our application, as described in section
2.Section 3 describes the system modules and how
an augmented scene has been created by using
Kinect data, and the implementation of an OSG
shader that allows you to have virtual objects with
real ones mixed at different depths is also described.
Finally, testing results and conclusions are detailed.
440
Casas X., Herrera G., Coma I. and Fernández M..
A KINECT-BASED AUGMENTED REALITY SYSTEM FOR INDIVIDUALS WITH AUTISM SPECTRUM DISORDERS.
DOI: 10.5220/0003844204400446
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 440-446
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 STATE OF THE ART AND
REQUIREMENTS.
Although traditionally MoCap systems for moving
virtual actors have been used in Virtual Reality
applications, with the growth of Augmented Reality
(AR) applications, these systems are used to control
a user in the real-world interacting with virtual
objects in the augmented scene.
One of the earliest examples found is the ALIVE
system (Maes, 1997), where a video camera captures
images of a person in order to detect the user’s
movements but also to integrate the real image onto
a virtual world. This can be considered a precursor
of AR, where video images are integrated with 3D
objects (like a dog) that are activated by the user’s
movements.
Several AR systems make use of markers
(usually geometric figures) to detect positions
(Mulloni, 2009). However, these systems do not
provide enough accuracy to move a virtual character
and all his joints. Sometimes optical systems with
markers (Dorfmuller, 1999) are used to detect
positions but, in other cases, more complex systems
are used that are based on ultrasound or inertial
sensors that detect movements in a wide range of use
(Foxlin,1998;Vlasic, 2007).
Regarding our system requirements, it is
necessary to track the positions of different body
parts in order to move an avatar representing the
user. Moreover, taking into account the users to
whom it is directed, who frequently experience
sensory difficulties (Bogdashina, 2003) it is better
that users do not wear complex devices. Thus,
mechanical and electromagnetic and other invasive
devices have been discarded from the beginning.
The release of the PrimeSense OpenNI for
programming Kinect in December 2010, opened up
new possibilities for us. Kinect incorporates an RGB
camera (640x480 pixels at 30Hz) and a depth sensor.
This is especially suitable to be used in an A.R.
system where images from the real word are needed.
The depth sensor provides distance information
which is useful to create the augmented scene
placing objects correctly.
Some researchers have started to use it in their
applications to track people (Kimber, 2011), but
there are no references of the use of this device in
Augmented Reality applications to control avatars.
The PrimeSense OpenNI (OpenNI, 2011)
provides information about positions and
orientations of a number of skeleton joints, which
can be used to control our virtual puppet. The first
tests performed with this system were satisfactory
regarding motion capture. However, it has a negative
aspect: the calibration requires the user to remain
still for a few seconds in a certain posture in front of
the camera. As the system is intended to train the
individual with autism to match postures, as one of
the final educational objectives, it makes no sense
that he/she has to be able to copy a posture in order
to enter the game. With the release of Microsoft’s
SDK the calibration problem was solved, this made
us choose it as a solution for our system.
Thus, we have got a system that captures user
positions in varying lighting conditions and without
dress requirements or markers.
3 SYSTEM DESCRIPTION
After comparing the pros and cons of different
motion capture devices a Pictogram Room using
Kinect has been made. This system consists of a
visualization screen measuring 3 x 2 meters, a
projection or retro-projection system (depending on
the room where it is to be installed), a PC, a Kinect
device and speakers. Kinect is equipped with two
cameras, an infrared camera and a video camera
with a 640x480 pixel resolution, and a capture rate
of 30 fps. So using Kinect it is possible to obtain not
only a standard video stream, but also a stream of
depth-images.
On the screen, images captured by Kinect are
displayed mixed with virtual information, creating
for users an augmented mirror where they can see
themselves integrated onto the augmented scene.
The system is designed to be used by users
playing with two different roles: child and educator.
Each user is represented by a virtual puppet colored
differently. Both users are located next to each other
and they are tracked in the same space.
The task of the educator is to select exercises and
activities that will be developed by the child, and
after that to give him/her appropriate explanations.
To achieve this, the teacher is provided with a menu
system displayed on the screen which can be
accessed by using the hand as a pointer. Once an
exercise is selected, the child’s and teacher’s
movements are captured and used as the interaction
interface with the system.
This system has been implemented by creating a
set of subsystems that deal with different tasks. On
the one hand, the input system allows you to choose
activities and capture the user’s actions and
movements. Depending on the activity, and the
user’s actions, the output system creates an
augmented environment by integrating images from
A KINECT-BASED AUGMENTED REALITY SYSTEM FOR INDIVIDUALS WITH AUTISM SPECTRUM
DISORDERS
441

the real world, video, sound and virtual elements.
Finally, there is educational software to edit and
manage exercises. Let’s look at these three
subsystems in more detail.
3.1 Input System
The input systems task is to collect information and
it can work in two different modes. On the one hand,
edit mode is intended to configure the system and to
allow the educator to select educational activities.
On the other hand, in play mode a child will develop
the proposed activities. In both modes of
functioning, there can be one or two users whose
actions are detected by the system.
Kinect provides information regarding the
positions of a number of user’s joints. These
positions are captured and transformed into positions
and rotations applied to virtual skeletons.
In edit mode, Kinect provides the hand position
which serves as an input pointer to select menus and
push buttons.
In play mode, the user interacts with the system
by moving his/her body and uses it for advancing
throughout the series of educational activities.
3.2 Output System
This module is responsible for creating an
augmented scene, taking input data coming from the
capture devices and control messages sent by the
exercise module.
In the augmented environment data coming from
several sources are integrated: video images from
the real world, virtual puppets representing users,
virtual objects, recorded videos and music. Thus,
users can see themselves in an augmented mirror
projected in front of them, and they can interact with
virtual objects.
Virtual avatars are controlled by means of joint
positions acquired by the input system. As one of
systems goals is to teach children to understand
pictograms, these avatars have been designed as
stick figures, and they are painted in the virtual
world over user images. The augmented scene is
created with OpenSceneGraph (OSG).
Depending on the exercise, bi-dimensional
pictograms or even tri-dimensional objects can
appear in the A.R. scene, and they can be located at
different positions, even behind the user. With OSG
it is easy to draw video images and virtual objects
displayed over the video.
Nevertheless, if a virtual object must be placed at
a certain depth, two things are needed: the z-position
of the users in the real world, and a mechanism to
mix the real and virtual objects while maintaining
the depth where they are located.
The problem of obtaining z-positions of users
and objects in the real world is solved by Kinect. In
addition to video images Kinect provides a depth
map, which is a matrix where each pixel’s depth is
stored. With this map it is possible to create a
drawing process maintaining the proper occlusion
between real and virtual elements through the z-
buffer.
The steps in this process (fig 1) are as follows:
1. Draw the image captured by the camera. This
image reflects the real scene.
2. With the depth information obtained by the
Kinect camera, it is possible to compute the z-
buffer values related to each pixel of the real
scene. This information will allow real objects
to be placed in their proper position within the
virtual world. To optimize the process a shader
has been implemented, so operations are
performed on the graphics card improving the
process velocity.
3. Virtual objects are drawn and mixed with the
real ones. To achieve this, a virtual camera must
be configured with the same parameters as the
real one. At this point, when drawing a virtual
object, the z-buffer data written previously
allows only those parts of the virtual objects that
are in front of the real ones to be drawn.
Music Engine
Music therapy has been proved very useful for
training individual with autism (Braithwaite, 1998).
For this reason, in addition to the visual information,
a music engine to generate musical sounds in the
exercises has been made use of. This music engine
can generate MIDI data in real time. In addition,
MIDI stored files can also be modulated, so
children’s favorite songs can be loaded. With the
information provided by Kinect about position and
momentum, tempo and song volume can be
modulated.
3.3 Educational Software
To configure the activities a management exercises
module has been created. This module contains a set
of classes to represent the different elements
involved: virtual puppets, video images, sounds,
virtual objects and pictograms and are described in
an XML file.
The exercises are shown to the teacher through
an interface where he/she can select the activities
(see Figure 2).
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
442
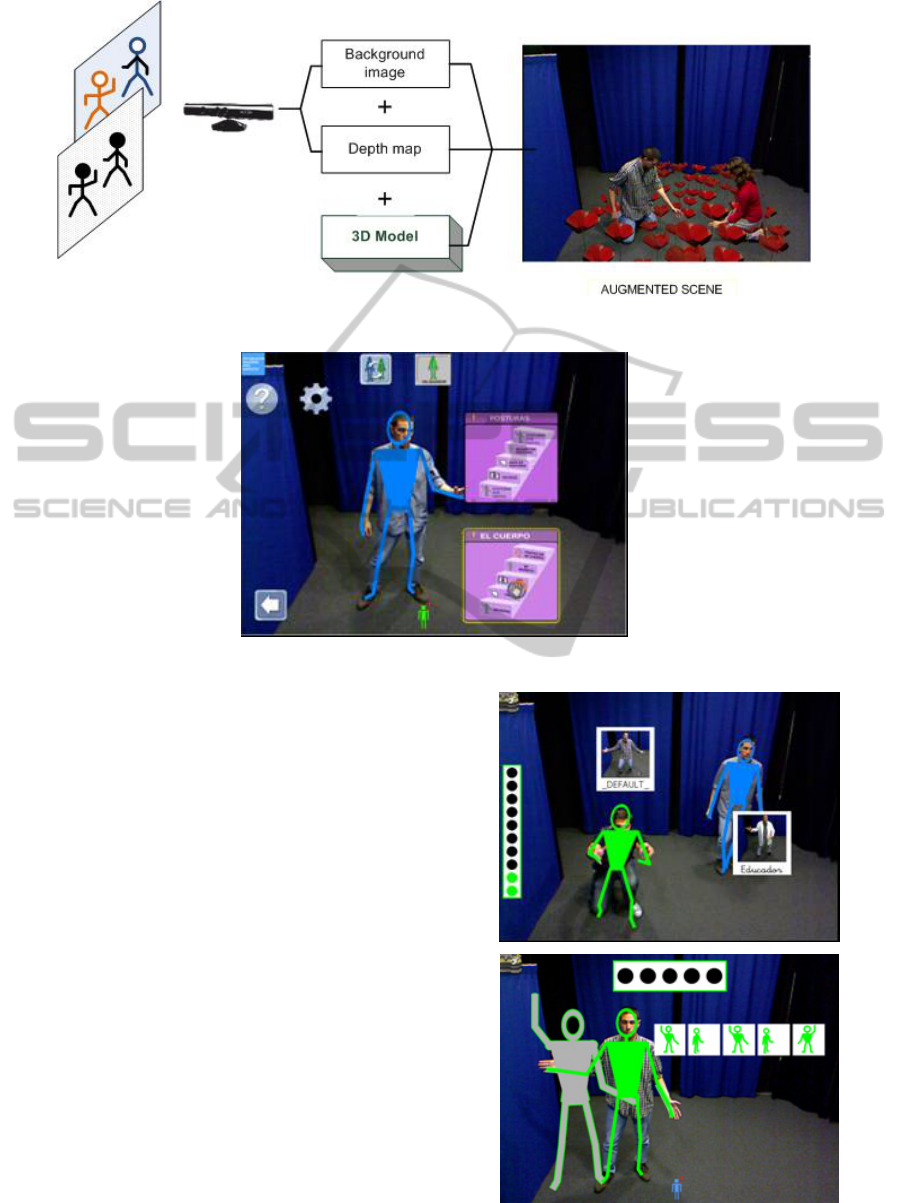
Figure 1: Scene composition using depth information.
Figure 2: Activities selection menus.
The activities are designed with the aim of
facilitating the acquisition of certain skills in ASD
children and the contents are classified into four
sections with 20 activities each one, with two of
them included in the first public version of our
software: body and postures.
In the learning about body section, the activities
are intended to develop the correspondence between
oneself and the avatar schematic figure, to identify
one own image, to discriminate between oneself and
others and to identify different body parts. This has
been developed overlaying the virtual avatar on the
user’s real image with different colors for each one.
Some of the activities designed involve users
taking pictures of themselves and using these
pictures later in the activity. Others consist of users
touching pictograms that appear on the screen with
different body parts (head, arms) (see Figure 3a).
Other activities are designed to perform body
movements. These movements are accompanied by
musical notes dynamically generated by the MIDI
engine, videos or lights appearing in the augmented
scene always in a playful way.
The body postures section includes activities to
Figure 3: (a) Two users touching pictograms (b) Shadows
guiding user.
A KINECT-BASED AUGMENTED REALITY SYSTEM FOR INDIVIDUALS WITH AUTISM SPECTRUM
DISORDERS
443

train the user to match postures. For the design of
these activities, in addition to the puppet
representing the user, a shadow that guides the user
has been created. This shadow is a grey colored stick
figure and in some exercises it guides user’s
movements (See figure 3b).
Other times, instead of a full avatar, there are
only certain parts of the body represented in the AR
scene. This strategy is used to focus attention on
those parts of the body. Some activities also make
use of clipped images with a body outline in a
posture that the user must imitate (see Figure 4).
Figure 4: Clipped images.
3.4 Interacting with the A. R. World
The system supports two users: the teacher and the
student, who are represented in the augmented world
by different virtual puppets. The activities are
designed to be played by a child following the
teacher’s instructions and in some cases in a
collaborative way. Moreover, users can enter and
leave the scene at any time, being detected by the
system without previous calibration.
In edit mode the teacher is responsible for
selecting exercises to be executed. This can be done
by means of a 2D menu system created with
OpenSceneGraph and displayed on the screen (see
Figure 2). To select menu options the teacher uses
his/her hand to move a pointer represented with a
hand icon. A button or menu option is activated
when the hand is placed on it for a few seconds. This
interaction with the 2D menu can also be done with
a standard mouse.
Regarding the interaction in play mode, the
exercises are designed to use body movements as a
form of interaction. Thus, there are exercises that
involve activities such as moving to different areas
of the room, peering into the holes of the images or
moving one’s body into the indicated positions.
In this mode there are also two options to
visualize the augmented world. One is showing the
video images with the virtual objects superimposed
on the display, and the other is eliminating the
background and the user images and showing only
the virtual figures and objects.
4 EVALUATION
In addition to functional testing, a set of assessment
tests with users have been carried out.
The first tests consisted of a system assessment
with 22 typically developed children, not having
autism. These children were aged between 3 and 4.
For these tests, the system was installed in a
school using a projection screen, a computer,
speakers and a Kinect device. At the time the tests
were conducted, Microsoft SDK was not yet
released so they were done with OpenNI. As we
have described in section 3, this library needs
previous calibration, requiring the users to remain
still in a certain position for several seconds (see
Figure 5).
Figure 5: a) System calibration. b) Two users with their
puppets.
Thus, as a first step, the children were asked to
stay still for a few seconds in the calibration
position. Then, the teacher gave explanations about
the activities to be performed. Each child played for
around 15 minutes, and he/she performed four
different activities related to movements, touching
objects or imitating postures.
When an activity had been completed the
educator noted whether the child did it without
support (3 points), with verbal (2 points) or physical
(1 point) assistance from the educator, or was not
able to do it (zero points). These tests with typically
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
444

developed children are useful to obtain reference
values for each activity. With this normative
information, each child with autism that uses the
application can be compared with these reference
values in order to have an idea of which skills have
developed more and which have to be improved.
During the development of the activities the only
problem that arose was the loss of calibration when a
child went outside the system and re-entered. With
regard to the activities, all the children were able to
do them, although sometimes further explanations
were necessary.
Following this, tests were performed in the same
school with children with ASD. The tests were
conducted with 5 children. One of them did not do
any of the activities and could not even manage to
do the posture calibration. Another child managed to
do the calibration and began to play, but after a few
minutes he stopped doing the activity and would not
continue. The remaining three calibrated and played,
some showing more skill than others. One of them
played like the typically developed children (see
Figure 6)
In future studies more test will be carried out
with a great number of children with autism.
Moreover, all the activities will be tested to find out
if the activities are properly designed or if some
aspects must be changed.
With regard to the calibration problems, as it was
mentioned above, these have been solved with the
use of Microsoft SDK which does not require
calibration (i.e. it is not necessary for the child to
match a given posture before entering the game).
Figure 6: System evaluation.
5 CONCLUSIONS
In this paper we have presented a system intended to
improve the development of children with autism.
The system uses Augmented Reality technologies.
The users are represented by means of virtual
stick figures which have been implemented with a
motion capture system that meets the two main
requirements; it is a low cost system, and it does not
require users to wear any device.
After the initial steps to test the feasibility of the
system on a CAVE, the motion capture was
developed based on vision algorithms for motion
detection. Finally, the release of the Kinect SDK
gave us a tool appropriate to our needs. From the
technical point of view, the problem of integrating
objects at different depths in the virtual world has
been solved by programming an OSG shader that
uses the depth map provided by Kinect.
With regard to the contents, a wide range of
activities have been developed. These activities
include images, videos, sounds and virtual objects
integrated in the augmented world where children
can play.
Therefore, the possibility of using Kinect to
develop this type of application aimed at children
with autism has been shown.
REFERENCES
Berry R., Makino, M., Hikawa, N., Suzuki, M., Inoue, N.,
2006. Tunes on the table. Multimedia Systems, 11 (3):
280-289.
Bogdashina, O. 2003. Sensory Perceptual Issues in Autism
and Asperger Syndrome Different Sensory
Experiences Different Perceptual Worlds. Jessica
Kingsley Publishers: London UK.
Braithwaite, M., & Sigafoos, J. 1998. Effects of social
versus musical antecedents on communication
responsiveness in five children with developmental
disabilities. Journal of Music Therapy, 35(2), 88–104.
Dorfmüller, K., 1999. Robust tracking for augmented
reality using retroreflective markers. Computer &
Graphics. Volume, 23, 6, 795-800.
Foxlin, E., Harrington, M., Pfeifer, G., 1998.
Constellation: A Wide-Range Wireless Tracking
System for Augmented Reality and virtual set
applications. Proceedings of SIGGRAPH’98.
Vlasic D. et al., 2007. Practical motion capture in
everyday surroundings. ACM Transactions on
Graphics, Vol. 26, 3.
Herrera, G; Jordan, R; Gimeno, J, 2006. Exploring the
advantages of Augmented Reality for Intervention in
ASD. Proceedings of the World Autism Congress,
Southafrica.
Herrera, G., Alacantud, F., Jordan, R., Blanquer, A.,
Labajo, G., 2008 Development of symbolic play
through the use of virtual reality tools in children with
autistic spectrum disorders SAGE Publications and
The National Autistic Society, Vol 12(2) 143–157.
Kerawalla, L., Luckin, R., Seljeflot, S., Woolard, A.,
A KINECT-BASED AUGMENTED REALITY SYSTEM FOR INDIVIDUALS WITH AUTISM SPECTRUM
DISORDERS
445

2006. Making it real: exploring the potential of
augmented reality for teaching primary school science.
Virtual Reality, 10, 163-174.
Kimber, D., Vaughan, J., Rieffel, E., 2011. Augmented
Perception through Mirror Worlds. Conference
AH’11.
Maes, P., Darrell, T., Blumberg, B., Pentland, A., 1997.
The ALIVE system: wireless, full-body interaction
with autonomous agents. Multimedia Systems 5: 105–
112.
Mulloni, A. 2009. Indoor Positioning and Navigation with
Camera Phones. Pervasive Computing, 8, 2, 22-31.
OpenNI TM. http://www.openni.org/ Visited: 2011.
Richard, E., 2007 Augmented Reality for Rehabilitation of
Cognitive Disabled Children: A Preliminary Study.
Virtual Rehabilitation. pp.102-108.
Strickland, D. 1997. Virtual reality for the treatment of
autism. In Virtual Reality in Neuro-PsychoPhysiology.
G. Riva, Ed. IOS press. Chapter 5, pp. 81-86.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
446
