
A LAYOUT ALGORITHM FOR THE VISUALIZATION
OF MULTIPLE RELATIONS IN GRAPHS
G´eraldine Bous
SAP Research Sophia Antipolis, Business Intelligence Practice, Av. Dr. Maurice Donat 805, 06250 Mougins, France
Keywords:
Visualization Algorithms, Hierarchical Graph Drawing, Multiple Relations, Structural Constraints.
Abstract:
Many recent applications involve data models that rely on heterogeneous graphs (multiple node and relation
types). Drawing these graphs is more difficult than drawing standard graphs, as it is desirable to take into
account the heterogeneity of graphs in the form of constraints, possibly stemming from user preferences,
to compute the layout. In this paper we propose a method for hierarchical graph drawing that is based on
structural constraint modeling. These constraints are combined with crossing minimization algorithms to yield
the desired visual effect. Three types of constraints are considered and illustrated, giving special attention to
the drawing of multiple relations for interactive graph visualization.
1 INTRODUCTION
Graph Drawing serves the purpose of determining a
layout, i.e. a representation in the plane, such that a
graph can be visualized and analyzed by a user. This
involves, for example, making all components of a
graph visible (vertices, edges, attribute values, labels,
etc.), addressing crossings, etc. Although the disci-
pline has a long and solid history (see, e.g., (Battista
et al., 1999) for an overview), several recent appli-
cations have opened new research challenges in the
area. A key example is the drawing of the hetero-
geneous graphs that arise in the modeling of systems,
networks and knowledgestructures - models that need
a proper visual representation in order to be under-
stood and analyzed by users.
In this paper, we address the problem of hetero-
geneous graph drawing on the basis of (user) con-
straints. We present a method that captures the het-
erogeneity of a graph by incorporating several types
of ‘visual constraints’ directly into the graph. By vi-
sual constraints, we refer to requirements on the final
layout of graph. For example, the user may specify
constraints relative to the order of certain nodes, wish
to visualize nodes clustered by type or simply require
the simultaneous visualizations of multiple relations
(i.e. multiple graphs) on a unique set of nodes. We
focus on hierarchical graph drawing (Sugiyama et al.,
1981) and model the constraints structurally, i.e. not
using parametric approaches, but rather by incorpo-
rating the constraints into the graph itself.
The paper is structured as follows: we describe the
problem and give a brief overview of related work in
section 2. The adaptation of hierarchical graph draw-
ing algorithms to incorporate structural constraints is
discussed in section 3. Next, we address the drawing
of graphs with multiple relations (section 4) and pur-
sue with extensions of our approach to other types of
visual constraints (section 5). We finally conclude in
section 6.
2 PROBLEM DESCRIPTION &
RELATED WORK
Traditionally, graph drawing algorithms are centered
towards the drawing of homogeneous graphs, i.e.
graphs in which all nodes and edges are alike. In other
words, it is in general assumed that graphs are com-
posed of abstract entities, i.e. vertices, that all are of
the same type; similarly, the edges of the graph are
simply assumed to be abstract connections (between
the vertices) that share the same properties. Modern
information and knowledge models are however fre-
quently built on the basis of heterogeneous graphs.
For example, semantic models involve different types
of nodes and relations. Likewise, business oriented
social networks can be designed to contain more than
just connections between employees: it is possible
to incorporate the hierarchical structure of the com-
pany, extra-hierarchical structures that model cross-
690
Bous G..
A LAYOUT ALGORITHM FOR THE VISUALIZATION OF MULTIPLE RELATIONS IN GRAPHS.
DOI: 10.5220/0003865106900700
In Proceedings of the International Conference on Computer Graphics Theory and Applications (IVAPP-2012), pages 690-700
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

organizational projects and teams, as well as other
types of entities and relations like furniture (e.g., cars
with relationships like ‘drives’ or ‘maintains’), data
transfer processes, budgets, etc. These last examples
are actually only a few of the actual user requests we
have encountered in practice in the context of soft-
ware design for business social networks. The reader
may refer to (Cuvelier et al., 2012) for more details.
2.1 Challenges in Drawing
Multi-relational Graphs
The main challenge in visualizing multiple relation-
ships, or, to be more general, in visualizing several
graphs defined on a common set of vertices, is not the
visualization of the graphs themselves. It is indeed
possible to visualize the different graphs separately
using state-of-the-art graph drawing algorithms (Bat-
tista et al., 1999; Herman et al., 2000, are excellent
surveys). However, a visualization approach based
on ‘multiple views’, each showing one relation at a
time, makes it difficult to show the ‘true’ connectivity
in the network and is hence impractical for analysis
purposes. Hence, the challenge resides in deciding
how multiple relations should be displayed, possibly
simultaneously and/or offering the possibility for user
interaction.
First, it must be decided whether all relationships
should be visualized at the same time or whether it is
better to approach the problem in an interactive man-
ner, allowing the user to select a subset of relation-
ships. We advocate the use of the second solution:
indeed, not all users may want to visualize the same
relationships, which calls for an interactive approach
where the user selects what she wants to see. Also,
the simultaneous representation of all relationships
may lead to visually loaded graphs that are visually
intractable and inappropriate for analysis.
The choice of an interactive approach to the vi-
sualization of multiple relationships may, in turn, be
approached in several ways. The simplest solution to
this problem actually consists in selecting a reference
graph, e.g. a hierarchical structure, and to superpose
the other graphs on demand. This approach requires
the computation of the optimal layout for the hierar-
chical structure and, as the user selects or un-selects
other relationships, the layout is updated by adding
new edges (resp. removing them) without changing
the position of the nodes. The main criticism of such
an approach is that it is likely to lead to a large num-
ber of edge crossings, which are usually considered to
be undesirable for the understanding and analysis of
the graph.
A second solution would be to re-compute a new
layout every time the user selects (or de-selects) a re-
lationship. As long as the number of nodes is rea-
sonable, it is indeed possible to optimize the layout
for a specific subset of graphs in real-time. Although
this approach would produce a much more appeal-
ing visual output, there is one important disadvantage:
adding as little as one relation to a given (current) dis-
play may lead to a complete disruption of both node
and edge locations. Indeed, what is optimal, e.g. in
terms of edge crossings, for a given set of relation-
ships, is not granted to be optimal for another one.
Re-optimization is thus problematic in that it destroys
the mental map of the user (Misue et al., 1995), which
requires her to re-adapt to the new display. Intuitively,
but also experimentally, it has been shown that this is
not desirable (Purchase, 2000; Purchase et al., 2006;
Saffrey and Purchase, 2008).
The question is thus whether it is possible to com-
pute a layout that would simultaneously be optimal
in the sense of edge-crossings and preserve the men-
tal map of the user as she navigates from one sub-
set of relationships to another. The two criteria may
nonetheless be antagonistic, as minimizing the num-
ber of crossings is totally independent from – and a
priori unrelated to – the idea of preserving the men-
tal map (i.e. the vertex positions in two-dimensional
space).
In this paper, we propose an approach designed to
meet both criteria. The general idea is to pre-compute
an optimal layout, in terms of crossings, for an ag-
gregated graph containing all relationships. As the
user selects (resp. un-selects) relationships, edges and
nodes are just added (resp. removed), but their loca-
tions do not need to change (as the layout is optimal
for all relationships).
2.2 Related Work
As the reader will see shortly, the work presented here
is essentially that of visualizing several graphs on the
same set of nodes at the same time. From this per-
spective, the topic is related to the drawing of com-
pound graphs. A compound graph is a graph com-
posed of a directed tree and one adjacency graph.
The few contributions to the resolution of this prob-
lem generally focus on sub-cases where the adjacency
graph only connects nodes not having common ances-
tors (Sugiyama and Misue, 1991; Bertault and Miller,
1999; Forster,2002) and represent the inclusion nodes
as rectangular containers. The work of (Raitner,
2004) is an extension to (Sugiyama and Misue, 1991)
that addresses the immersive visualization of the tree
structure. The work discussed in (Holten, 2006) uses
a technique based on edge-bundling and illustrates the
A LAYOUT ALGORITHM FOR THE VISUALIZATION OF MULTIPLE RELATIONS IN GRAPHS
691

use of other container representations than rectangles
(hierarchical drawings, treemaps, etc.). Our work dis-
tinguishes itself from the research topics mentioned
above in two ways. First, in the topic it addresses: the
modeling of ‘visual constraints’ for the visualization
of graphs containing heterogeneous data. Second, in
the algorithmic approach used here, which is based on
structural constraints in combination with a hierarchi-
cal graph drawing algorithm.
The work of (Shen et al., 2006) addresses the vi-
sualization of social network graphs, where, like is
the case in this paper, several relationships may exist
between nodes. (Shen et al., 2006) use the descrip-
tion of these relationships, called ‘ontology’, to fil-
ter and cluster the original graph data into meaningful
agglomerates; in contrast, our work addresses the vi-
sualization of the relationships themselves, ideally in
such a way that the result is visually tractable. (Fekete
et al., 2003) use a treemap-basedapproach to visualiz-
ing a hierarchy and set of additional edges or relation-
ships, the latter being drawn ‘on top’ of the treemap.
The problem addressed is thus similar, but the goal of
the method is different: our approach seeks to orga-
nize the layout in such a way that requirements on it
(i.e. the visual constraints) can be met.
In the forthcoming section, we review the algo-
rithmic procedure for drawing hierarchical graphs.
We explain how a generic structural constraint is mod-
eled and embedded into a graph and at what stage this
occurs in the algorithmic process.
3 HIERARCHICAL GRAPH
DRAWING WITH
STRUCTURAL CONSTRAINTS
In this section we describe a methodology to adapt
traditional hierarchical graph drawing algorithms to
the case of graphs that are to be drawn taking ac-
count visual constraints in view of computing a lay-
out that enables the interactive visualization of mul-
tiple relations. The only requirement on the visual
constraints is that they have to be modeled as graphs.
More specifically, the approach we discuss here con-
sists in aggregating the constraints and the hierarchi-
cal structure into a single graph that can be drawn
with state-of-the-art algorithms. The key element to
turning the structural constraints into the desired vi-
sual constraints is achieved thanks to ‘design’ of the
structural constraints in combination with the cross-
ing minimization step. In this section, we describe
the approach in its general form; specific types of con-
straints are addressed in sections 4 and 5.
3.1 Problem Formulation and Notations
Let H(V, E) be a hierarchy, i.e. a directed acyclic tree
of vertices v ∈ V and edges (v, w) ∈ E with E ⊆ V ×V.
In parallel, let there be I (directed or undirected)
graphs G
i
(V
i
, E
i
), i ∈ I, with V
i
∩ V 6=
/
0 (i.e. V
i
is
not restricted to V
i
⊂ V, but both must have a least
one node in common). The heuristic method we dis-
cuss here is based on four distinct steps. First, the
layering step that determines the layer y(v) at which
every node v ∈ H of the tree should be placed. Sec-
ond, an aggregation phase to embed H and the con-
straints G
i
into a unique directed tree H
G
with ver-
tices V
G
and edges E
G
(note that V ⊆ V
G
). The third
step determines the order o(v) of the vertices in ev-
ery layer of H
G
with the purpose of minimizing the
number of edge crossings. The final step refines the
horizontal position x(v) of every vertex for the screen
layout. The reader should note that the steps one,
two and four correspond to the steps of the Sugiyama
algorithm (Sugiyama et al., 1981). It is also worth
emphasizing that, although we here focus on trees,
the Sugiyama algorithm – and hence the method pre-
sented here – can be extended to graphs in general; the
reader may refer to (Battista et al., 1999) for details.
3.2 Layering
The first step of our approach computes the vertical
position y(v) of the vertices of the hierarchy v ∈ H.
It is important to note that the layer computed at this
level is maintained throughout the different steps of
the algorithm: the layer of a node v ∈ V hence is iden-
tical in the trees H and H
G
.
Several methods can be used to assign a layer to
the nodes of a directed tree (Battista et al., 1999); we
use the shortest path method, that is, a method that as-
signs every node to the layer immediately below that
of its closest predecessor. Let
δ
H
(i, j) =
1 if (i, j) ∈ E
0 otherwise.
(1)
If δ
H
(i, j) = 1, it means that the vertices i and j are
connected by an edge directed towards j. Solving the
following linear program provides the vertical coordi-
nates of the nodes of the hierarchy H (note that layer
1, the top layer, is assigned to the root of the tree):
min
∑
i∈V
y(i)
s.t. y( j) − y(i) ≥ 1 if δ
H
(i, j) = 1
y(i) ≥ 1 ∀i ∈ V.
(2)
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
692

3.3 Graph Aggregation
The graph aggregation step concerns the embedding
of the structural constraints into the hierarchy H. In
general terms, the aggregation step consists in per-
forming the union of the graphs, i.e.
H
G
= H
I
[
i=1
G
i
, (3)
where H
G
denotes the aggregated graph. The satisfac-
tion of the visual constraints is attained by the embed-
ding in combination with the crossing minimization
step discussed below. More precisely, the constraints
must be designed in such a way that they lead to cross-
ings in H
G
when they are not satisfied. The detailed
modeling of different types of constraints and the cor-
responding aggregation procedures are discussed in
sections 4 and 5.
3.4 Crossing Minimization
The crossing minimization problem of hierarchical
graphs is generally approached by minimizing the
crossings of all pairs of consecutive layers in the tree.
This problem, known as the “two-layer crossing prob-
lem”, is NP-hard, which justifies the existence of sev-
eral heuristic methods to solve it. In the context of
constrained graph drawing, we seek to minimize not
only the crossings in the hierarchy H, but also the
crossings that would arise through the violation of the
structural constraints. In other words, crossings are
minimized for the set of vertices {v ∈ V
G
| y(v) = k}
and {v ∈ V
G
| y(v) = k+ 1} for k = 1, ..., y
max
(H
G
)−1,
where y
max
denotes a function that returns the maxi-
mum depth of a tree. The goal of the two-layer cross-
ing problem is to determine the order in which the
vertices of the two layers should be placed as to min-
imize the number of crossings between the edges that
connect them. Two well known and well documented
techniques are the “median heuristic” and the “swap
heuristic”, that exist in several variants and generally
demand the use of dummy (temporary) vertices to
lead to good results. The interested reader may refer
to (Battista et al., 1999) and the references therein for
a detailed description of these two, as well as other,
heuristic methods.
3.5 Final Coordinate Assignment
Once the horizontal order of the vertices of H
G
has
been determined, two distinct steps must actually be
performed. First, all dummy vertices introduced in
previous steps must be removed. This includes those
added to model structural constraints, as well as those
added during the crossing minimization step. The fi-
nal step consists in refining the horizontal coordinates
of the remaining vertices (i.e. those of H), without
changing their order, to obtain a more uniform and vi-
sually attractive result on the screen. Several methods
exist to this purpose, some of which are documented
in (Battista et al., 1999).
4 AGGREGATION FOR
MULTI-RELATIONAL GRAPHS
In this section we describe the application of graph
drawing with structural constraints to the case of
multi-relational graphs, which we illustrate by the
joint visualization of linear processes, in view of al-
lowing an interactive visualization without disrupting
the mental map of the user. The different relations are
embedded into the hierarchical graph in order to com-
pute a layout that is optimal, in terms of crossings, for
any subset of relations the user may want to explore.
We first discuss the modeling of the constraints as
graphs, as well as the aggregation process (which was
presented in a generic manner in section 3.3); next we
provide some experimental results regarding the com-
putational complexity of our approach.
4.1 Approach Description
Like previously, let H(V, E) be a hierarchy and
G
i
(V
i
, E
i
) be a series of I graphs, i ∈ I, with V
i
⊆ V.
We consider the special case where every G
i
mod-
els a linear process, that is, a sequence of vertices
(v
i1
, v
i2
, ..., v
in
i
), where n
i
represents the length of pro-
cess i. Each process is thus a separate graph - a rela-
tion - on different, not necessarily disjoint, subsets of
V.
The method of structural constraints makes it pos-
sible to model proximity and adjacency constraints
for nodes in H. This type of constraints cannot be
taken into account in traditional hierarchical graph
drawing and are necessary to visualize the process in
both in a ‘linear way’ and to restrict each process to
a well defined portion of the (visual representation of
the) hierarchy. The constraints are designed to force
the vicinity of vertices that are connected to each
other and have been assigned the same layer in the
y-coordinate determination step (section 3.2); in addi-
tion, this minimizes the number of edges that cross the
layout from one side to another. For example, in the
illustration of figure 1(a), superposing the linear pro-
cess on the hierarchy implies both edge crossings and
same-layer traversing edges (from vertex B to vertex
E).
A LAYOUT ALGORITHM FOR THE VISUALIZATION OF MULTIPLE RELATIONS IN GRAPHS
693

The aggregated graph H
G
is built in I steps: start-
ing with the hierarchy alone, each graph G
i
is inte-
grated sequentially. The constraints are modeled ac-
cording to the pseudocode below:
for k = 1 to n
i
do
if y(v
i,k
) 6= y(v
i,k+1
) then
if y(v
i,k
) < y(v
i,k+1
) then
δ
H
G
(v
i,k
, v
i,k+1
) = 1
else
δ
H
G
(v
i,k+1
, v
i,k
) = 1
end if
else
add temporary vertex v
t
to H
G
y(v
t
) = y(v
i,k
) + 1
δ
H
G
(v
i,k
, v
t
) = 1
δ
H
G
(v
i,k+1
, v
t
) = 1
end if
end for
If two consecutive vertices in process G
i
are not in
the same layer, they are connected in H
G
with an edge
directed from the lower layer vertex to the higher level
vertex (root-to-leaf direction), in order to avoid creat-
ing cycles. To the contrary, if two consecutivevertices
in G
i
have the same layer, a constraint is added in or-
der to enforce a placement in which the two vertices
will be direct neighbors. This constraint is modeled
on the basis of a temporary vertex v
t
that is connected
to and placed below the two process vertices. Figure
1(b) illustrates this principle.
The application of the crossing minimization pro-
cedure on the aggregated graph H
G
achieves the vi-
sual consistency for the joint visualization of the hi-
erarchy and the linear processes. Indeed, the connec-
tion of process vertices thanks to temporary vertices
and edges in the ‘aggregated hierarchy’ H
G
forces the
proximity of process vertices. Intuitively, it is clear
that, the further away two process vertices are from
each other (i.e. the more other vertices are placed be-
tween them), the greater the number of edge crossings
will be. The principle is illustrated in figures 1(b) and
1(c), that, respectively, show the aggregated hierarchy
before and after crossing minimization. The final re-
sult of this method, i.e. after removal of temporary
vertices, is shown in figure 1(d).
When several relations exist on the same hierar-
chy, pre-computing the layout for all relations simul-
taneously with this technique allows determining a vi-
sual representation that is optimal for the aggregated
graph, i.e. for all relations. It is hence easy to use
an interactive approach where to user is allowed to
select the relations that she wants to visualize by sim-
ply adding or hiding the corresponding edges without
modifying the layer and order of the vertices, thereby
maintaining the her mental map.
4.2 Experimental Results
The main drawbacks of hierarchical graph drawing
algorithms are the computation time and, if heuris-
tic methods are used to compensate for the computa-
tional complexity, the potential sub-optimality of the
solutions also becomes a disadvantage. The computa-
tional complexity of our method is higher than that of
drawing the base hierarchy alone, as the aggregated
graph H
G
contains a certain number of dummy ver-
tices to model the structural constraints. It is thus of
interest to determine the impact of the number of pro-
cess nodes (and indirectly of the number of process
dummy vertices) on the average computation time
with the algorithm proposed in the previous section.
We have performed an experimental evaluation of
the crossing minimization step of the algorithm, i.e.
the step with highest computational complexity. The
algorithm implements the median heuristic in Matlab.
We evaluated the computation time for randomly gen-
erated trees of size n and one or more linear processes.
More precisely, for every randomly generated tree, a
total of lp nodes, where lp is a random number satis-
fying 2 ≤ lp ≤ n, were assigned to one or more linear
processes (we thus have lp =
∑
i
n
i
). We measure the
average computation time for every pair (n, lp). Note
that the actual number of nodes is larger than n, not
only due to the structural constraint approach, but also
due to the other dummy vertices that are needed in the
algorithm (crossing minimization step).
We performed a total of 55700 tests with 5 ≤ n ≤
230 and 5 ≤ lp ≤ min(n, x
max
· y
max
), where x
max
and
y
max
are, respectively, the maximum width and depth
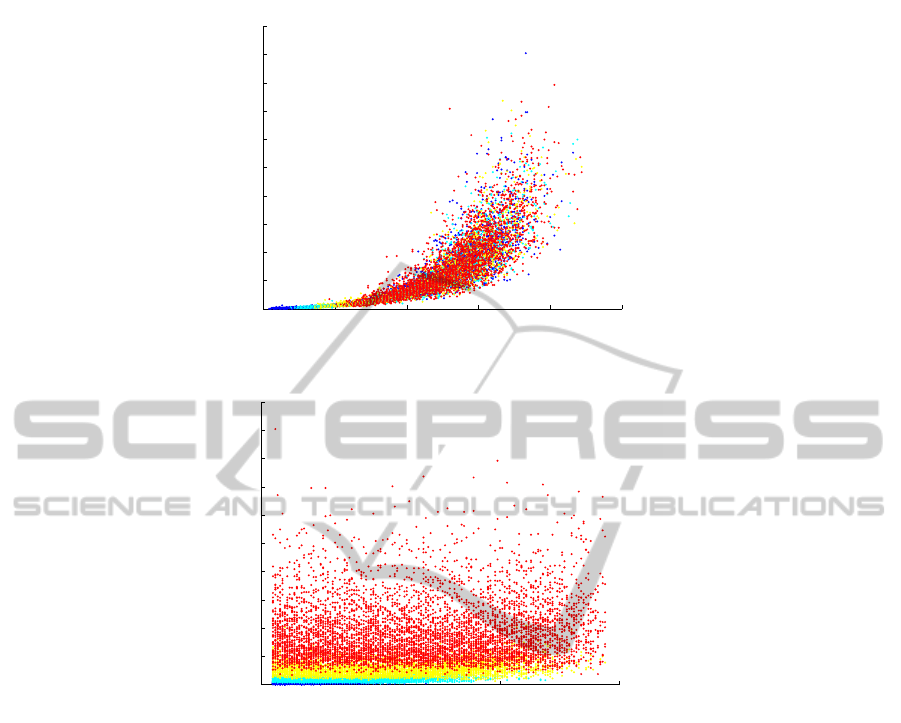
of a tree. The scatter plot in figure 2(a) shows the
CPU time (in seconds) as a function of the number of
nodes n in the base tree. The color code used for the
dots is a function of lp. More precisely, lp has been
divided into six equal parts, with each color assigned
to an interval: blue < cyan < green < yellow < ma-
genta < red. The scatter plot in figure 2(b) shows the
CPU time (in seconds) as a function of the number of
process nodes lp. Again, we divide the outcomes in
six categories, this time according to the size of the
tree n, and use the same color code as above. The
purpose of the color code is to show if there is a cor-
relation between the CPU time and the variable that
is not shown. That is, for figure 2(a) the color code
shows the impact of lp on a plot that shows (n, f(n));
for 2(b), the color gives a hint of the impact of n on a
plot that shows (lp, f(lp)).
An analysis of both figures leads to the follow-
ing conclusion: the decisive factor in the computation
time is n, the size of the base tree. Indeed, when show-
ing (n, f(n)), we can see that lp has but little correla-
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
694
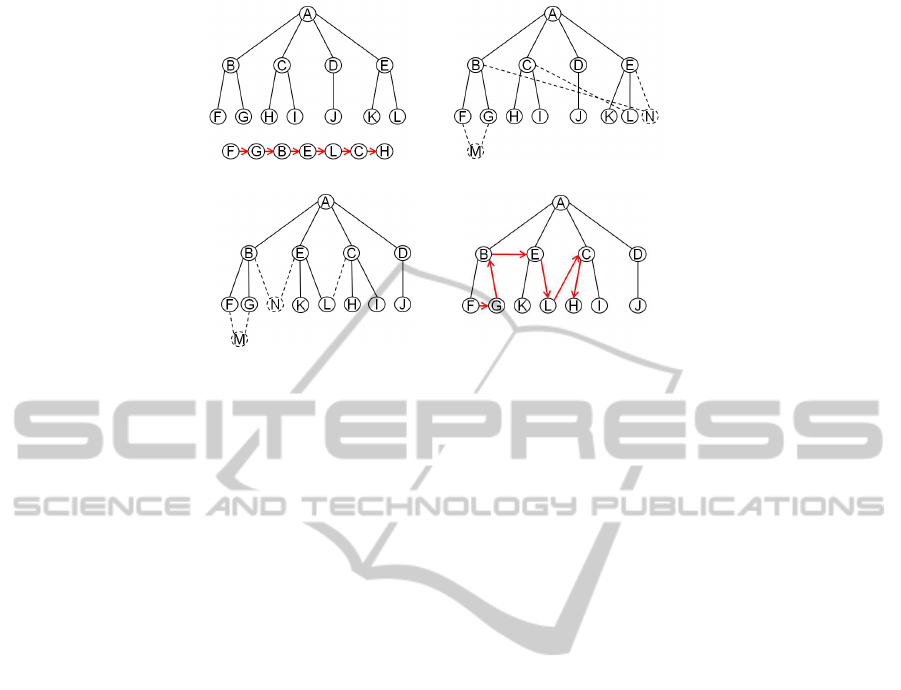
(a) Hierarchy and process. (b) Structural constraints.
(c) Optimization. (d) Final result.
Figure 1: Example of a structural constraint to embed a linear process into a tree. The edge-crossing minimization step in
combination with the structural constraint allows visualizing the process in a linear manner, without traversing edges.
tion since the ‘color code’ is randomly distributed in
the cloud of data-points (note that a correlation is vis-
ible for lower values of n as lp ≤ n). This is con-
firmed by the scatter plot (lp, f (lp)), which shows an
almost perfectly horizontal cloud with layered colors.
Hence, higher CPU time is correlated essentially to
n and not to lp – which implies that the method of
structural constraints does not have a significant neg-
ative impact on the computational complexity and on
the performance of the algorithm.
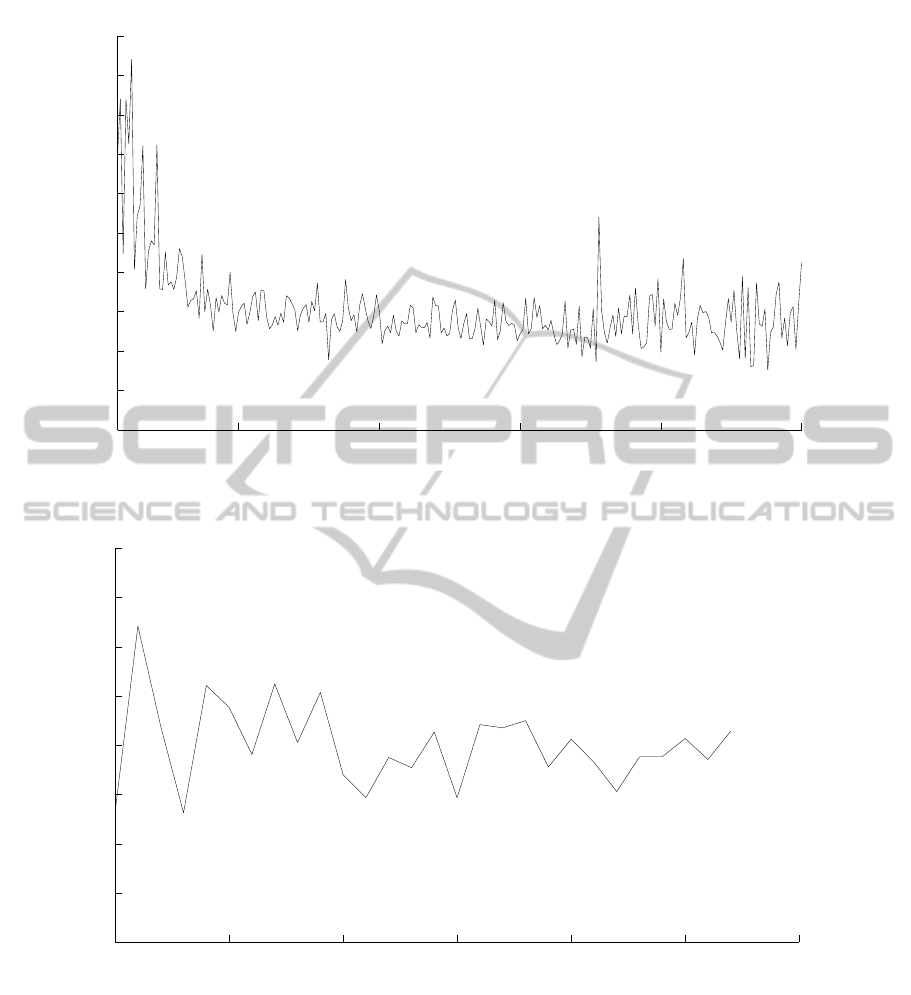
In addition to the problem of computational com-
plexity, we have tested the quality of the method here
proposed with respect to the number of crossings.
Both the hierarchies and linear processes used for the
tests are randomly generated and approximately 5000
tests were run. The reference for the comparison is
a tree whose layout is determined by the ‘standard
Sugiyama algorithm’ (with the Swap Heuristic), but
where no processing is done on the nodes of the lin-
ear processes. In other words, the edges of the lin-
ear processes are simply drawn ‘on top’ of the tree.
The average number of crossings was then determined
both as a function of n and lp. Figure 3(a) shows the
ratio of the average number of crossings without pro-
cessing to the average number of crossings with our
method as function of n; similarly figure 3(b) shows
the ratio as a function of lp. The first figure shows
that the structural constraints method is particularly
efficient for n < 50, where no processing doubles the
number of crossings. In general, it appears that our
method improves the result by approximately 25%.
As for the second figure, as function of lp, the trend
is more steady, with a 20% improvement in favor of
our method.
5 EXTENSION TO OTHER TYPES
OF CONSTRAINTS
The technique of structural constraints described in
section 3 can be easily extended to other types re-
quirements than those of representing multiple rela-
tions (linear processes) in a visually consistent man-
ner. In this section we illustrate how to perform the
graph aggregation for two additional types of con-
straints on hierarchical graphs: first, the clustered vi-
sualization of multiple node types and, second, for or-
der constraints on a subset of the nodes of the hierar-
chy.
5.1 Visual Node Clustering in
Hierarchical Graphs
For graph-based data structures – here assumed hier-
archical – that contain different node types (e.g. per-
sons, furniture, etc.), it may be desirable to draw the
graph such that nodes of the same type are shown to-
gether, thereby forming clusters of identical nodes.
Like for multi-relational graphs, this can be achieved
by designing adequate structural constraints that are
embedded into the tree structure, previous to the
crossing minimization step.
As usual, let H(V, E) denote the hierarchy; more-
over, assume that every node in the hierarchy has
a given type i, where i = 1, ..., I. In this case, we
define the structural constraints as graphs G
i
(V
i
, E
i
),
such that V
i
= {v
t
i
∪ (v ∈ V | type(v) = i)} and E
i
=
{(v
t
i
, v) | v ∈ V
i
\ v
t
i
}. In other terms, we define a con-
straint graph for every node type; the graph is com-
A LAYOUT ALGORITHM FOR THE VISUALIZATION OF MULTIPLE RELATIONS IN GRAPHS
695
0 50 100 150 200 250
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
no. of nodes
CPU time (s)
(a) CPU as a function of n.
0 50 100 150
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
no. of process nodes
CPU time (s)
(b) CPU as a function of lp.
Figure 2: Computational complexity of our method. The figures show that higher CPU time is correlated essentially to n and
not to lp.
posed of a temporary vertex v
t
i
that is connected to all
nodes of H that have type i.
The constraint graphs are built and embedded se-
quentially into the hierarchy H, forming the aggre-
gated hierarchy H
G
. Initializing H
G
as H, the process
for the aggregation of one graph G
i
is described be-
low:
add temporary vertex v
t
i
to H
G
y(v
t
i
) = y
max
(H) + 1
for all v ∈ V | type(v) = i do
δ
H
G
(v, v
t
i
) = 1
end for
The temporary vertex, symbolizing the cluster for
a given node type, is added on the fly as the constraint
is embedded into the hierarchy. Temporary vertices
are placed one layer below all nodes of H, i.e. at layer
y
max
(H) + 1 (so that y
max
(H
G
) = y
max
(H) + 1), and
connected to all vertices of type i.
The ‘clustering effect’ is again obtained thanks to
the combined use of structural constraints and a cross-
ing minimization algorithm on the graph H
G
. Indeed,
mixing nodes of different types creates crossings on
the (temporary) edges that bind the nodes to their cor-
responding ‘cluster vertex’; the constraints and the
crossing minimization thus implicitly induce horizon-
tal regions that, whenever possible, contain nodes of
one specific type. This is illustrated in figure 4, where
we use the same base hierarchy as in figure 1 with
nodes in three colors to symbolize their types (fig-
ure 4(a)). Figures 4(b) and 4(c) respectively show
the aggregated hierarchy graph before and after the
crossing minimization; the final result, after removal
of dummy vertices and edges, is shown in figure 4(d).
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
696
50 100 150 200 250
0.5
0.75
1
1.25
1.5
1.75
2
2.25
2.5
2.75
3
no. of nodes
ratio of average no. of crossings
(a) Crossing ration as function of n.
5 10 15 20 25 30 35
1
1.05
1.1
1.15
1.2
1.25
1.3
1.35
1.4
no. of process nodes
ratio of average no. of crossings
(b) Crossing ration as function of lp.
Figure 3: Ratio of the average number of crossings without processing to the average number of crossings with the structural
constraints technique.
5.2 Vertex Order Constraints
The use of structural constraints also enables the end-
user to specify order constraints on a subset of the
vertices of the tree H. Again, the idea is to design the
constraints in such a way that the application of the
crossing minimization algorithm on the aggregated
graph H
G
forces the satisfaction of the constraints.
Let, as usual, H(V, E) denote the hierarchy and
assume that there exists a subset of vertices V
o
⊆ V
for which the (relative) order is defined, i.e. o(v
1
) <
o(v
2
) < ... < o(v
|V
o
|
) for v
i
∈ V
o
. If the aggregated
A LAYOUT ALGORITHM FOR THE VISUALIZATION OF MULTIPLE RELATIONS IN GRAPHS
697

(a) Hierarchy and types. (b) Structural constraints.
(c) Optimization. (d) Final result.
Figure 4: Example of a structural constraint to cluster the nodes of a tree according to their type.
hierarchy is initialized as H
G
= H, then an order con-
straint can be embedded into the hierarchy with the
following procedure:
for i = 1 to |V
o
| with v
i
∈ V
o
do
add temporary vertex v
t
i
to H
G
y(v
t
i
) = y
max
(H) + 1
o(v
t
i
) = i
δ
H
G
(v
i
, v
t
i
) = 1
if i > 1 then
δ
H
G
(v
i−1
, v
t
i
) = 1
end if
end for
The process described therein is quite simple: for
each ordered node v
i
, one dummy vertex is added be-
low the hierarchy (i.e. y(v
t
i
) = y
max
(H) + 1) and is
connected to v
i
. Since the order of the dummy vertex
is imposed (o(v
t
i
) = i) it suffices to apply the cross-
ing minimization excluding the dummy vertex layer,
i.e. taking the edges into account but without reorder-
ing the nodes, to impose an order on the vertices of
v
i
∈ V
o
. Without the if-loop and the constraint added
at line 7, the order of the nodes will be preserved by
the crossing minimization algorithm, but may only be
a relative order. That is, no constraints restrict other
nodes (v ∈ V \V
o
) to be placed in between the nodes
of V
o
. If the end-user prefers a strict order, then it is
necessary to add an additional constraint that connects
a vertex v
i
∈ V
o
not only to its corresponding dummy
vertex v
t
i
, but also to that of its successor in the order
relation.
An illustration for this case would be quite simi-
lar to the one we used for the linear process in figure
1; indeed, a linear process, as defined in section 4,
is nothing but a strict linear order (see, e.g., (Roman,
2008) for an exhaustive definition of order relations).
In the case of order constraints, the modeling is how-
ever different: all temporary vertices are placed in the
bottom layer so that the crossing minimization algo-
rithm can be applied only to the layers of the original
tree H.
To conclude this section, we emphasize that the
use of structural constraints is not limited to the con-
straints we discuss here. For example, it is con-
ceivable to combine ordering constraints with cluster-
ing constraints or constraints relative to multiple rela-
tions.
6 DISCUSSION AND FUTURE
WORK
We have introduced the concept of structural con-
straints and shown how these can be used to model
visual constraints for heterogeneous graphs. The con-
straints are designed as to be treated by crossing min-
imization algorithms. We explored three different
cases, with their respective constraints, to which the
method can be applied. We give particular focus to
the visualization of multiple relations, showing how
our technique can be used for the computation of lay-
outs destined to interactive graph visualization with-
out having a significant impact on the base compu-
tational complexity of algorithm, dominated by the
crossing minimization step.
While it is certainly conceivable to design specific
algorithms for each of the examples given here, the
advantage of using structural constraints is precisely
to offer the possibility to embed the constraints di-
rectly into the data. Consequently, it is possible to
use generic state-of-the-art hierarchical graph draw-
ing algorithms without further modifications. From
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
698

the perspective of large scale software design, the use
of generic, reusable and extensible modules are crite-
ria of capital importance, which our method allows to
satisfy.
Although the method presented here produces
good results, further experiments are required to val-
idate it for larger graphs, as well as to analyze its
applicability when different types of constraints are
combined together. The quality of the results is
highly impacted by the quality of the output provided
by the heuristic methods used in the crossing mini-
mization step. This imposes further research on us-
ing this method in combination with other types of
approaches and visualization techniques, like those
presented in (Burch and Diehl, 2008; Burch et al.,
2010) for the visualization of time-varying compound
graphs. Interesting is also the work of (Shen et al.,
2006), as well as the approach presented in (Muelder
and Ma, 2008), which combines clustering techniques
and tree-maps for fast layout computation of large
graphs. Another important direction for future re-
search is related to the non-discriminative applica-
tion of crossing algorithms. The embedding of all
relations and constraints into a unique graph makes
it impossible to discriminate edge and node types
(constraint, hierarchy, relation, etc.). When no zero-
crossing solutions exist, it is impossible for current
crossing minimization algorithms to distinguish be-
tween ‘favorable’ and ‘unwanted’ crossings. For
example, the end-user may specify that she prefers
crossings in the hierarchy rather than in the linear pro-
cesses she visualizes. Hence, the design of algorithms
that can prioritize crossings according to the edge and
node types is an important next step to consider.
Heterogeneous graph drawing, in general, is a
topic rich in challenges where many problems remain
to be addressed. These range from the user experi-
ence domain (e.g. adequate layout criteria and ‘coher-
ent’ visual representations), the management of zoom
in/out approaches following several criteria, to the in-
teractivity with respect to the visible subset of rela-
tions themselves.
ACKNOWLEDGEMENTS
The work presented here was developed in the context
of the ARSA project (Analyse des R´eseaux Sociaux
pour Administrations), partially funded by the French
DGCIS (Direction G´en´erale de la Comp´etitivit´e, de
l’Industrie et des Services). The author wishes to
thank our end-user, the City Administration of An-
tibes, with a special mention to our contact, Patrick
Duverger.
REFERENCES
Battista, G. D., Eades, P., Tamassia, R., and Tollis, I. G.
(1999). Graph Drawing: Algorithms for the Visual-
ization of Graphs. Prentice Hall, Upper Saddle River.
Bertault, F. and Miller, M. (1999). An algorithm for draw-
ing compound graphs. In Proceedings of the 7th In-
ternational Symposium on Graph Drawing (GD’99),
pages 197–204.
Burch, M. and Diehl, S. (2008). Timeradartrees: Visualiz-
ing dynamic compound digraphs. In Proceedings Eu-
rographics/ IEEE-VGTC Symposium on Visualization
2008, volume 27, pages 823–830.
Burch, M., Fritz, M., Beck, F., and Diehl, S. (2010). Time-
spidertrees: A novel visual metaphor for dynamic
compound graphs. In Hundhausen, C. D., Pietriga, E.,
Daz, P., and Rosson, M. B., editors, Proceedings of the
IEEE Symposium on Visual Languages and Human-
Centric Computing VL/HCC 2010, pages 168–175.
Cuvelier, E., Bous, G., Aufaure, M.-A., and Kleser, G.
(2012). ARSA: Analyse des R´eseaux Sociaux pour
les Administrations - une exp´erience d’int´egration de
r´eseaux sociaux internes et externes dans une admin-
istration. Ing´enierie des Syst`emes d’Information. To
appear.
Fekete, J.-D., Wang, D., Dang, N., and Plaisant, C. (2003).
Overlaying graph links on treemaps. In IEEE Sympo-
sium on Information Visualization Conference Com-
pendium (demonstration).
Forster, M. (2002). Applying crossing reduction strate-
gies to layered compound graphs. In Proceedings of
the 10th International Symposium on Graph Drawing
(GD’02), pages 276–284.
Herman, I., Melanon, G., and Marshall, S. (2000). Graph
visualization and navigation in information visualiza-
tion: A survey. IEEE Transactions on Visualization
and Computer Graphics, 6:24–43.
Holten, D. (2006). Hierarchical edge bundles: Visualiza-
tion of adjacency relations in hierarchical data. IEEE
Transactions on Visualization and Computer Graph-
ics, 12:741–748.
Misue, K., Eades, P., Lai, W., and Sugiyama, K. (1995).
Layout adjustments and the mental map. Journal of
Visual Languages and Computing, 6:183–210.
Muelder, C. and Ma, K.-L. (2008). A treemap based method
for rapid layout of large graphs. In Proceedings of
Visualization Symposium, 2008. PacificVIS ’08. IEEE
Pacific, pages 231 –238.
Purchase, H. (2000). Effective information visualization:
a study of graph drawing aesthetics and algorithms.
Interacting with Computers, 13:147–162.
Purchase, H., Hoggan, E., and Grg, C. (2006). How impor-
tant is the “mental map”? an empirical investigation
of a dynamic graph layout algorithm. In Proceedings
of 14th International Symposium on Graph Drawing
(GD’06), pages 184–195.
Raitner, M. (2004). Visual navigation of compound graphs.
In Proceedings of the 12th International Symposium
on Graph Drawing (GD’04), pages 403–413.
A LAYOUT ALGORITHM FOR THE VISUALIZATION OF MULTIPLE RELATIONS IN GRAPHS
699

Roman, S. (2008). Lattices and Ordered Sets. Springer,
New York.
Saffrey, P. and Purchase, H. (2008). The “mental map” ver-
sus “static aesthetic” compromise in dynamic graphs:
a user study. In Proceedings of the 9th Conference on
Australasian User Interface, pages 85–93.
Shen, Z., Ma, K.-L., and Eliassi-Rad, T. (2006). Visual
analysis of large heterogeneous social networks by se-
mantic and structural abstraction. IEEE Transactions
on Visualization and Computer Graphics, 12:1427 –
1439.
Sugiyama, K. and Misue, K. (1991). Visualization of struc-
tural information: Automatic drawing of compound
digraphs. IEEE Transactions on Systems, Man, and
Cybernetics, 21:876–892.
Sugiyama, K., Tagawa, S., and Toda, M. (1981). Methods
for visual understanding of hierarchical system struc-
tures. IEEE Transactions on Systems, Man, and Cy-
bernetics, 11:109–125.
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
700
