
COVARIANCE BASED FISH TRACKING IN REAL-LIFE
UNDERWATER ENVIRONMENT
Concetto Spampinato
1
, Simone Palazzo
1
, Daniela Giordano
1
, Isaak Kavasidis
1
, Fang-Pang Lin
2
and Yun-Te Lin
2
1
Department of Electrical, Electronics and Computer Engineering, University of Catania,
Viale Andrea Doria, 6 -95125, Catania, Italy
2
National Center of High Performance Computing, No. 7, R&D 6th Rd., Hsinchu Science Park, Hsinchu City, Taiwan
Keywords:
Object Tracking under Extreme Conditions, Covariance Approach, Intelligent Underwater Video Analysis.
Abstract:
In this paper we present a covariance based tracking algorithm for intelligent video analysis to assist marine
biologists in understanding the complex marine ecosystem in the Ken-Ding sub-tropical coral reef in Taiwan
by processing underwater real-time videos recorded in open ocean. One of the most important aspects of
marine biology research is the investigation of fish trajectories to identify events of interest such as fish preying,
mating, schooling, etc. This task, of course, requires a reliable tracking algorithm able to deal with 1) the
difficulties of following fish that have multiple degrees of freedom and 2) the possible varying conditions
of the underwater environment. To accommodate these needs, we have developed a tracking algorithm that
exploits covariance representation to describe the object’s appearance and statistical information and also
to join different types of features such as location, color intensities, derivatives, etc. The accuracy of the
algorithm was evaluated by using hand-labeled ground truth data on 30000 frames belonging to ten different
videos, achieving an average performance of about 94%, estimated using multiple ratios that provide indication
on how good is a tracking algorithm both globally (e.g. counting objects in a fixed range of time) and locally
(e.g. in distinguish occlusions among objects).
1 INTRODUCTION
Typically marine biologists study fish populations
in their natural habitat using casting nets in the
ocean, human underwater observation and photogra-
phy (Rouse, 2007), combined net casting and acoustic
(sonar) (Brehmera et al., 2006) and human hand-held
video filming. However these approaches either are
invasive (such as the net casting method) or provide
scarce information (such as photography). In order to
overcome these limitations, underwater cameras have
been widely used in the last years, since they do not
influence fish behavior and also provide large amount
of video material (with cameras active day and night,
the only limitation is the amount of mass memory re-
quired to store the videos). On the other hand, it is
impractical to manually analyze this huge quantity of
video data, both because it requires a lot of time and
also because it is error prone – it is unrealistic to as-
sume people can fully investigate all the information
in the videos. Therefore, automatic video analysis
methods are heavily demanded such as the one devi-
sed in the Fish4Knowledge
1
project, which uses live
video feeds from ten underwater cameras located in
the coral reefs of Taiwan’s shores and aims at devel-
oping an automatic system for integrated data captur-
ing, video analysis, fish detection and classification,
and querying, for the marine biologists to use, in order
to study fish populations, behavior and interactions.
The main difficulty in this kind of tasks is the na-
ture of the videos to be processed. Traditionally, such
tasks have involved the analysis of videos taken in
controlled environments, such as tanks (Morais et al.,
2005; Petrell et al., 1997), where for example light-
ing conditions do not change with time, the back-
ground is static to simplify fish detection, the type
of fish is known, etc. The lack of these assumptions
greatly complicates the task to be accomplished and
requires the development of automatic analysis meth-
ods which are robust enough to handle all the pos-
sible varying conditions of the environment. In this
direction, key roles are played by image preprocess-
1
http://fish4knowledge.eu
409
Spampinato C., Palazzo S., Giordano D., Kavasidis I., Lin F. and Lin Y..
COVARIANCE BASED FISH TRACKING IN REAL-LIFE UNDERWATER ENVIRONMENT.
DOI: 10.5220/0003866604090414
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 409-414
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

ing (e.g. (Cannav
`
o et al., 2006)), object detection,
tracking and recognition (e.g. (Spampinato, 2009)
and (Spampinato et al., 2010)).
One aspect to deal with when analyzing marine
ecosystems is fish tracking, whose importance goes
beyond simple population counting. In fact, be-
havior understanding and fish interactions’ analysis,
which are interesting perspectives for marine biolo-
gists to study, strictly rely on trajectories extracted us-
ing tracking approaches. However, tracking presents
a few major difficulties, which become greater in un-
derwater environments where objects have multiple
degrees of freedom or when the scene conditions can-
not be controlled.
Many different approaches have been studied in
literature on how to solve the visual tracking prob-
lem such as Kalman filter-based tracking (Doucet
et al., 2001), particle filter tracking (Gordon et al.,
1979), point feature tracking, mean-shift tracking
(Comaniciu and Meer, 2002). However, to the best
of our knowledge, only a variation of mean-shift,
the CAMSHIFT (Bradski, 1998), has been applied
to underwater environments (Spampinato et al., 2008)
achieving an average tracking performance (estimated
as correct counting rate) of about 85%. However, the
CAMSHIFT shows a main drawback when dealing
with fish-fish and fish-background occlusions mainly
due to the fact that it exploits only color informa-
tion. In this paper we propose a tracking algorithm
where fish are modeled as covariance matrices (Tuzel
et al., 2006) of feature built out of each pixel be-
longing to the fish’s region. This representation al-
lows to embody both spatial and statistical proper-
ties of non-rigid objects, unlike histogram represen-
tations (which disregard the structural arrangement of
pixels) and appearance models (which ignore statisti-
cal properties). As shown in the experimental results
section, the performance of the proposed approach is
very encouraging and better that the ones achieved
with CAMSHIFT, thus also indicating how our co-
variance based approach performs very well under ex-
treme conditions.
The remainder of the paper is: Section 2 de-
scribes the details of the proposed covariance based
fish tracking algorithm; Section 3, instead, shows the
achieved tracking results with hand-labeled ground
truth data. Finally, Section 4 points out the conclud-
ing remarks.
2 COVARIANCE BASED
TRACKING ALGORITHM
In the following description, we use “tracked object”
to indicate an entity that represents a unique fish and
contains information about the fish appearance his-
tory and its current covariance model; and “detected
object” to indicate a moving object, which has not
been associated to any tracked object yet. For each
detected object, the corresponding covariance matrix
is computed by building a feature vector for each
pixel, made up of the pixel coordinates, the RGB and
hue values and the mean and standard deviation of
the histogram of a 5×5 window with the target pixel
as centre. The covariance matrix, which models the
object, is then computed from this feature vector and
associated to the detected object. Afterwards, this ma-
trix is used to compare the object with the currently
tracked objects, in order to decide which one it re-
sembles the most. The main issue in comparing co-
variance matrices lies in the fact that they do not lie
on the Euclidean space—for example, the covariance
space is not closed under multiplication with nega-
tive scales. For this reason, as suggested in (Porikli
et al., 2005), we used F
¨
orstner’s distance (Forstner
and Moonen, 1999), which is based on generalized
eigenvalues, to compute the similarity between two
covariance matrices:
ρ(C
i
,C
j
) =
v
u
u
t
d
∑
k=1
ln
2
λ
k
(C
i
,C
j
) (1)
where d is the order of the matrices and
λ
k
(C
i
,C
j
)
are the generalized eigenvalues of covariance matri-
ces C
i
and C
j
, computed from
λ
k
C
i
x
k
−C
j
x
k
= 0 k = 1 ···d (2)
The model of each tracked object is then com-
puted as a mean (based on Lie algebra (Porikli et al.,
2005)) of the covariance matrices corresponding to
the most recent detections of that object. In order to
deal with occlusions, the algorithm handles the tem-
porary loss of tracked objects, by keeping for each
of them a counter (T T L) of how many frames it
has been missing; when this counter reaches a user-
defined value (for 5-fps videos, the best value, ob-
tained empirically, was 6), the object is considered
lost and discarded. In order to decide whether a de-
tected object is a feasible candidate as the new appear-
ance of a current tracked object, we check if the de-
tected object’s region overlaps, at least partially, with
the tracked object’s search area, which by default is
equal to the bounding box of that object’s latest ap-
pearance. To manage the temporary loss of an ob-
ject, and the fact that while the object has not been
detected it might have moved away from its previous
location, we modify the search area, expanding it pro-
portionally to the number of frames where the object
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
410
(a)
(b)
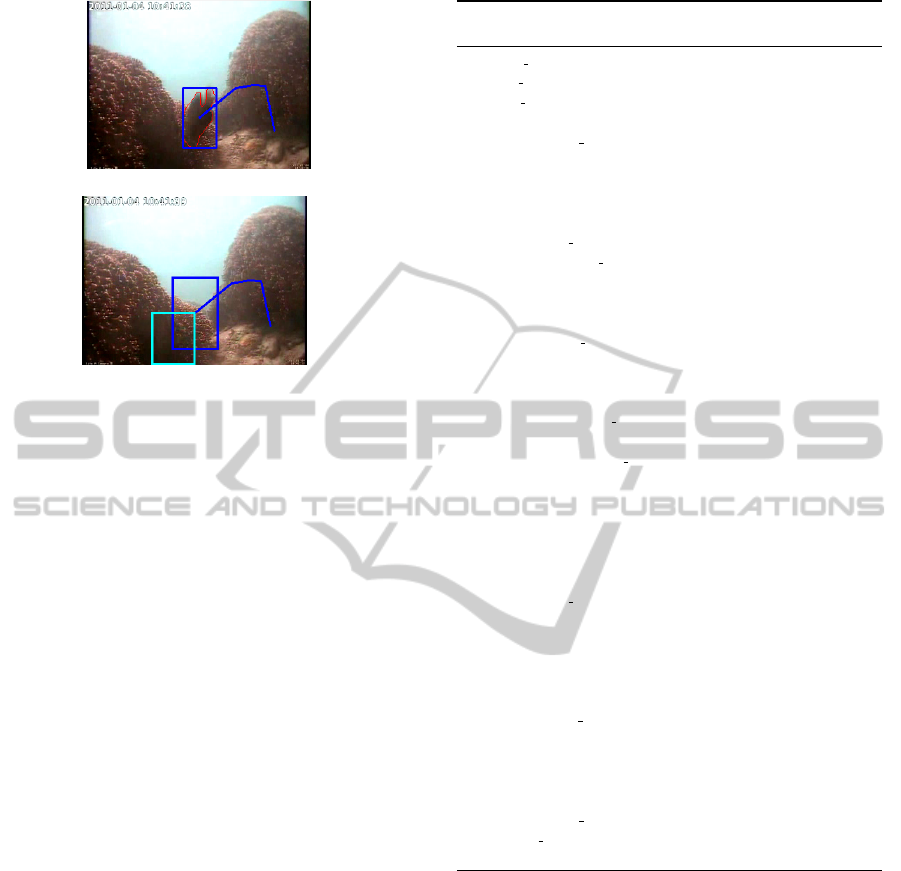
Figure 1: Search area expansion: when an object (1(a)) is
lost, the corresponding search area (1(b)) is composed of a
“central search area” (in dark blue) and a “directional search
area” (in lighter blue), oriented towards the estimated direc-
tion of the fish.
has been missing. In this case, the search area is made
up of two rectangles: a “central search area”, which is
a rectangle centered at the object’s previous location,
initialized to the object’s previous bounding box and
expanded evenly in all directions; and a “directional
search area” which takes into consideration the recent
motion trend of the object to give a simple estimate of
its direction, and which consists of a rectangle with
a vertex at the object’s previous location and the cor-
respondent opposite vertex located accordingly with
the estimated object’s direction. An example of the
search area expansion mechanism is shown in Fig-
ure 1. The steps performed by the proposed tracking
algorithm are shown in Algorithm 1.
3 RESULTS
To test the proposed algorithm we used 10 sample un-
derwater videos. Each videoclip was 10 minutes long,
sampled at 320×240 with a 24-bit color depth, at a
frame rate of 5 fps. In total we had 30000 frames
and 1262 unique fish. The recorded scenes were fea-
tured by: 1) sudden and gradual light changes to-
gether with the periodical gleaming typical of under-
water scenes, 2) bad weather conditions (e.g. cloudi-
ness, storms and typhoons) that affect image contrast,
3) murky water: the clarity of the water changed dur-
ing the day due to the drift and the presence of plank-
ton and 4) multiple fish occlusions: due to the absence
of the third dimension (we process 2D images) a lot
Algorithm 1: Pseudo-code implementation of the tracking
algorithm.
detected objects ← runDetectionAlgorithm()
tracked objects ← getCurrentlyTrackedObjects()
feasible associations ←
/
0
Compute covariance matrix for each detected object
for D
j
in detected objects do
D
j
.computeCovarianceMatrix()
end for
Compute set of possible associations between tracked objects and de-
tected objects
for T
i
in tracked objects do
for D
j
in detected objects do
if T
i
.getCurrentPosition() overlaps D
j
.getBlob() then
d
i j
← computeCovarianceDistance(T
i
.currentModel(),D
j
.cov
arianceMatrix())
feasible associations.add((T
i
, D
j
, d
i j
))
end if
end for
end for
sortByDistance(feasible associations)
Assign each detected object to the covariance-closer tracked object
for (T
i
, D
j
, d
i j
) in feasible associations do
if not D
j
.isAssigned() then
D
j
.assignTo(T
i
)
T
i
.updateModel()
end if
end for
If a tracked object has been missing for too many frames, remove it
for T
i
in tracked objects do
if T
i
.foundInCurrentFrame() then
T
i
.resetTTL()
else
T
i
.decreaseTTL()
if T
i
.getTTL() = 0 then
tracked objects.remove(T
i
)
end if
end if
end for
Add new tracked objects
for D
j
in detected objects do
tracked objects.createNew(D
j
)
end for
of occlusions among fish were present in the analyzed
scenes. For each video, ground-truth data (against
which we compared the output of the algorithm) was
hand-labeled. For each frame, the set of significant
(i.e. large enough to be clearly identified as a fish)
fish was selected, and for each of such fish its posi-
tion and contour was hand-drawn. Tracking identi-
fication numbers (IDs) were used to label detections
in different frames as belonging to the same unique
fish, in such a way that fish which underwent tem-
porary occlusions would then be re-assigned to the
same tracking ID. We directly fed our tracking algo-
rithm with the detection data (i.e. the fish) provided
by the ground truth, so that the tracking results would
not be influenced by detection errors. The perfor-
COVARIANCE BASED FISH TRACKING IN REAL-LIFE UNDERWATER ENVIRONMENT
411
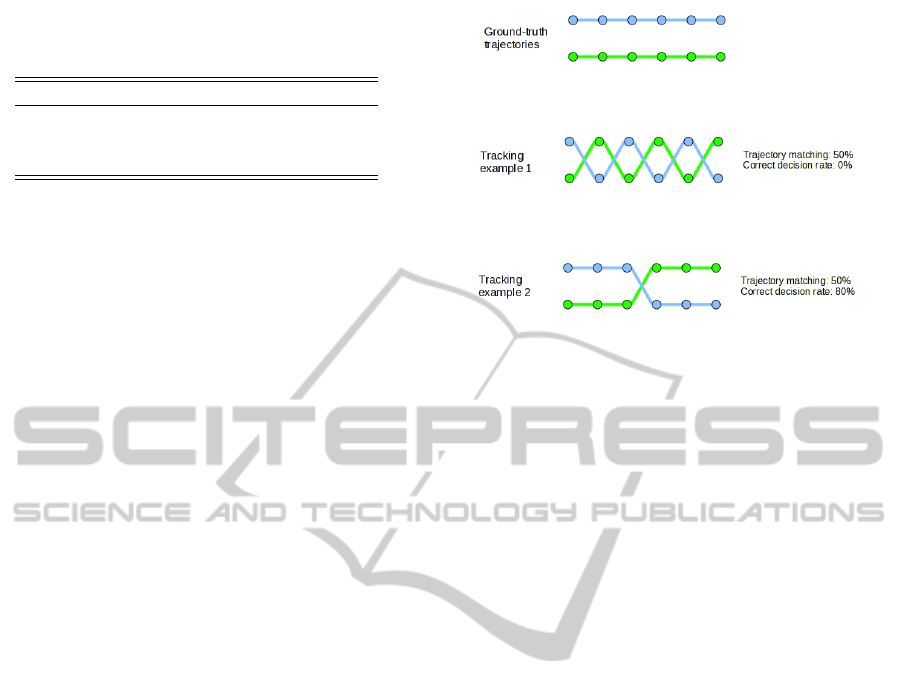
Table 1: Comparison between the results obtained by the
proposed algorithm and CAMSHIFT on the ground-truth
data.
Covariance tracker CAMSHIFT
CCR 91.3% 83.0%
ATM 95.0% 88.2%
CDR 96.7% 91.7%
mance of our algorithm was also compared with the
one achieved by the CAMSHIFT since it is the only
approach tested on underwater videoclips in (Spamp-
inato et al., 2008). To assess the ground-truth-vs-
algorithm comparison we adopted the following met-
rics, which are based on the ones existing in the liter-
ature (Bashir and Porikli, 2006), but that describe the
performance of a tracking algorithm both globally, at
the trajectory level (e.g. the correct counting rate and
the average trajectory matching), and locally, at the
single tracking decision level (e.g. the Correct deci-
sion rate):
• Correct Counting Rate (CCR): percentage of cor-
rectly identified fish out of the total number of
ground-truth fish.
• Average Trajectory Matching (ATM): average per-
centage of common points between each ground-
truth trajectory and its best-matching tracker-
computed trajectory.
• Correct Decision Rate (CDR): let a “tracking de-
cision” be an association between a fish at frame
t
1
and a fish at frame t
2
, where t
1
< t
2
; such track-
ing decision is correct if it corresponds to the ac-
tual association, as provided by the ground truth.
The correct decision rate is the percentage of cor-
rect tracking decisions, and gives an indication on
how well the algorithm performs in following an
object, which is not necessarily implied by the av-
erage trajectory matching (see Figure 2).
Table 1 shows the results obtained by the co-
variance tracking algorithm compared to the ones
achieved by the CAMSHIFT algorithm, in terms of
the above-described indicators. It is clear how our ap-
proach performs better than CAMSHIFT and also has
a very good absolute accuracy, being able to correctly
identify more than 90% of unique objects with a very
high degree of correspondence to the ground-truth tra-
jectories.
Figure 3 shows an example of how the proposed
algorithm and CAMSHIFT handle fish-fish occlu-
sions. It is possible to notice that the covariance
tracker is able to correctly follow the clownfish (in
the blue box) after it is hidden behind the other fish,
whereas in the same frame sequence CAMSHIFT is
(a)
(b)
(c)
Figure 2: Difference between the trajectory matching score
and the correct decision rate. Fig. 2(a) shows two ground
truth trajectories of two fish, whereas the other two images
represent two examples of tracking output. In Fig. 2(b),
although the tracker fails at each tracking decision the tra-
jectory matching score is 50%, whereas the correct decision
rate is 0. Differently, in Fig. 2(c) the tracker fails only in
one step and the trajectory matching score is 50% (as the
previous case) whereas the correct decision rate is 80% (4
correct associations out of 5).
not able to identify the clownfish’s appearances as be-
longing to the same unique fish, and after the occlu-
sion it starts tracking it as a new object.
4 CONCLUDING REMARKS
In this work we tackled the problem of fish track-
ing, which shows several difficulties due to the un-
constrained environment, the uncontrolled scene con-
ditions and the nature of the targets to be tracked, i.e.
fish, whose motion tends to be erratic, with sudden
direction and speed variations, and whose appearance
can undergo quick changes. In order to deal with
these problems, the approach we adopted is based on
a covariance-based modeling of objects, which has
proved to be suitable for tracking non-rigid objects in
a noisy environment, by representing an object’s spa-
tial and statistical information in a unique compact
structure, the covariance matrix. The performance
evaluation showed that the proposed tracker outper-
forms CAMSHIFT (previously applied to the same
scenes) and is able to correctly detect more than 90%
of the objects, with a correct decision rate higher than
96%. Since this approach has proved to be very effec-
tive on real-life underwater environments, further de-
velopments on this work will investigate the use and
adaption of this algorithm in different contexts, e.g.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
412
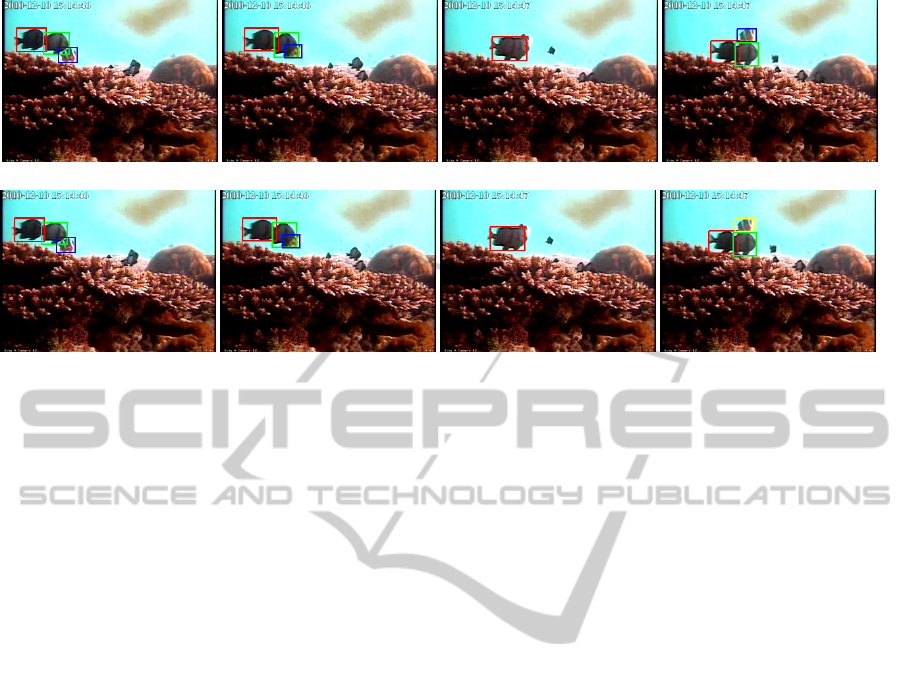
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 3: Tracking results on three occluding fish with the proposed approach (top row) and CAMSHIFT (bottom row). We
can see that the CAMSHIFT tracker fails to recognize that the fish in the yellow box is the same as the one in the blue box.
pedestrian or vehicle tracking in urban environments
(Faro et al., 2008) and (Faro et al., 2011).
ACKNOWLEDGEMENTS
This research was funded by European Commission
FP7 grant 257024, in the Fish4Knowledge project
(www.fish4knowledge.eu).
REFERENCES
Bashir, F. and Porikli, F. (2006). Performance Evaluation of
Object Detection and Tracking Systems. In IEEE In-
ternational Workshop on Performance Evaluation of
Tracking and Surveillance (PETS2006).
Bradski, G. R. (1998). Computer Vision Face Tracking For
Use in a Perceptual User Interface. Intel Technology
Journal, Q2.
Brehmera, P., Chib, T. D., and Mouillotb, D. (2006). Am-
phidromous fish school migration revealed by com-
bining fixed sonar monitoring (horizontal beaming)
with fishing data. Journal of Experimental Marine Bi-
ology and Ecology, 334(1):139–150.
Cannav
`
o, F., Giordano, D., Nunnari, G., and Spampinato,
C. (2006). Variational method for image denoising by
distributed genetic algorithms on grid environment. In
Proc. of WETICE-2006, pages 227 – 232.
Comaniciu, D. and Meer, P. (2002). Mean shift: A robust
approach toward feature space analysis. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
24(5):603–619.
Doucet, A., De Freitas, N., and Gordon, N., editors (2001).
Sequential Monte Carlo methods in practice. Springer
Verlag.
Faro, A., Giordano, D., and Spampinato, C. (2008). Evalu-
ation of the trac parameters in a metropolitan area by
fusing visual perceptions and cnn processing of web-
cam images. IEEE Transactions on Neural Networks,
19(6):1108–1129.
Faro, A., Giordano, D., and Spampinato, C. (2011). In-
tegrating location tracking, traffic monitoring and se-
mantics in a layered its architecture. IET Intelligent
Transport Systems, 5(3):197–206.
Forstner, W. and Moonen, B. (1999). A metric for covari-
ance matrices. Technical report, Dept. of Geodesy and
Geoinformatics, Stuttgart University.
Gordon, N., Doucet, A., and Freitas, N. (1979). An algo-
rithm for tracking multiple targets. IEEE Trans. Au-
tom. Control, 24(6):843–854.
Morais, E. F., Campos, M. F. M., Padua, F. L. C., and
Carceroni, R. L. (2005). Particle filter-based pre-
dictive tracking for robust fish counting. Computer
Graphics and Image Processing, Brazilian Sympo-
sium on, 0:367–374.
Petrell, R., X.Shi, Ward, R., Naiberg, A., and Savage, C.
(1997). Determining fish size and swimming speed in
cages and tanks using simple video techniques. Aqua-
cultural Engineering, 16(63-84).
Porikli, F., Tuzel, O., and Meer, P. (2005). Covariance track-
ing using model update based on lie algebra. In Proc.
IEEE Conf. on Computer Vision and Pattern Recogni-
tion.
Rouse, W. (2007). Marine biology research experiment:
Population dynamics of barnacles in the intertidal
zone.
Spampinato, C. (2009). Adaptive objects tracking by us-
ing statistical features shape modeling and histogram
analysis. In Seventh International Conference on Ad-
vances in Pattern Recognition, pages 270–273.
COVARIANCE BASED FISH TRACKING IN REAL-LIFE UNDERWATER ENVIRONMENT
413

Spampinato, C., Chen-Burger, Y.-H., Nadarajan, G., and
Fisher, R. B. (2008). Detecting, tracking and counting
fish in low quality unconstrained underwater videos.
In VISAPP (2), pages 514–519.
Spampinato, C., Giordano, D., Di Salvo, R., Chen-Burger,
Y.-H. J., Fisher, R. B., and Nadarajan, G. (2010). Au-
tomatic fish classification for underwater species be-
havior understanding. In Proceedings of the ACM
ARTEMIS 2010, pages 45–50, New York, NY, USA.
ACM.
Tuzel, O., Porikli, F., and Meer, P. (2006). Region covari-
ance: A fast descriptor for detection and classification.
Proc. 9th European Conf. on Computer Vision.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
414
