
An Intelligent Transportation System for Accident Risk Index
Quantification
Andreas Gregoriades
1
, Kyriacos Mouskos
2
and Harris Michail
3
1
Department of Computer Science and Engineering, European University Cyprus, Nicosia, Cyprus
2
Cyprus Transport and Logistics Ltd, Nicosia, Cyprus
3
Department of Electrical Engineering and Information Technology, Cyprus University of Technology, Limassol, Cyprus
Keywords: Bayesian Networks, Dynamic Traffic Assignment, Road Safety.
Abstract: Traffic phenomena are characterized by complexity and uncertainty, hence require sophisticated
information management to identify patterns relevant to safety and reliability. Traffic information systems
have emerged with the aim to ease traffic congestion and improve road safety. However, assessment of
traffic safety and congestion requires significant amount of data which in most cases is not available. This
work illustrates an approach that aims to alleviate this problem through the integration of two mature
technologies namely, simulation-based Dynamic Traffic Assignment (DTA) and Bayesian Networks (BN).
The former generates traffic flow data, utilised by a BN model that quantifies accident risk. Traffic flow
data is used to assess the accident risk index per road section and hence, escape from the limitation of
traditional approaches that use only accident frequencies to quantify accident risk. The development of the
BN model combines historical accident records obtained from the Cyprus police and domain knowledge
from road safety.
1 INTRODUCTION
Road safety constitutes a problem of paramount
importance worldwide (Bartley, 2008). To deal with
this problem, intelligent transportation systems (ITS)
have emerged. ITS are also used in the following
areas: congestion control, mobility enhancement,
delivering environmental benefits, and boosting
productivity and expanding economic and
employment growth. The work presented herein
describes a novel approach and tool for assessing the
accident risk index of road networks. This
prerequisites the assessment of accident risk.
According to (Zheng, 2009), accident risk models
are divided into two categories: social risk models,
that measure probabilistic (frequentist) collective
damage, and individual risk models, that measure
probabilistic (frequentist) individual damage. These
are categorized into aggregate and disaggregate
methods. The former, use global statistics and the
former specific events (Bartley 2008). However,
predicting accident risk requires not only
frequencies of crashes per road section but also
traffic flow data. However, in most cases traffic flow
and accident data cannot be found together. To that
end authorities perform safety analysis using only
crash data which is an approximate approach to
accident risk estimation. This paper aims to address
this problem through the development of a novel
Intelligent Traffic Information System (ITIS) that
leverages the capabilities of two mature
methodologies namely simulation-based Dynamic
Traffic Assignment (DTA) embedded in the VISTA
simulator (Ziliaskopoulos et al., 1996) and Bayesian
Belief Networks (BN). The former is widely used in
transportation planning and operations to predict
drivers’ decisions (where and when to travel on the
road network), and in work was used to estimate
traffic flow conditions for each road section. The
latter is a powerful uncertainty modelling technique
used for the quantification of accident risk under
varying conditions.
The paper is organised as follows. Next section
describes the methodology. Subsequent sections
concentrate on data pre-processing and BN model
development. The integration of VISTA with the BN
along with the results that emerge from the
amalgamation of the two technologies in an ITS, is
described next. The paper finishes with conclusions.
318
Gregoriades A., Mouskos K. and Michail H..
An Intelligent Transportation System for Accident Risk Index Quantification.
DOI: 10.5220/0003989203180321
In Proceedings of the 14th International Conference on Enterprise Information Systems (ICEIS-2012), pages 318-321
ISBN: 978-989-8565-10-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 METHODOLOGY
The Road Safety Assessor, ITS system proposed
herein is the amalgamation of probabilistic risk
assessment with a mesoscopic traffic simulation,
namely VISTA. The need for this integration boils
down to the limitations of traditional traffic
information systems that mainly concentrate of data
warehousing. The methodology proposed utilises
data marts to generate projections of future system
behaviour. To that end, intelligent information
management techniques are employed to distil
knowledge used to develop models that enable the
prospective system behaviour. The two models that
emerged from this process are the accident risk
assessment model and the traffic simulation model.
The accident risk assessment employed is causality-
based and uses BN. In BN each node is used to
represent a random variable that has been identified
to have a causal influence on accident risk. Each
directed edge represents an immediate dependence
or direct influence between parent and child
variables (Jensen, 2001). Evidence is entered in the
model through instantiation of leaf node on the
model. Inference is achieved by belief propagation
through the models topology. BN technology is used
to model how traffic and infrastructural factors
influence accident risk. The second component of
the approach is a road traffic simulator based on
DTA. The DTA model is used in VISTA through the
Dynamic User Equilibrium (DUE) model (Peeta et
al., 2000). The use of DTA model enhances the
limitations of existing practices by providing a
consistent way of producing estimates of traffic flow
conditions of road networks using limited
information from traffic flow detectors. Moreover, it
produces timely and complete traffic volume
estimates for all sections of a road network and
hence, can be used to assess accident risk using time
varying conditions. The integration of BN with
VISTA in the proposed traffic information system
enables the dynamic assessment of accident risk
using simulated traffic conditions and prior
knowledge embedded in the BN. A pilot study
conducted with the system aimed to assess the safety
performance of the Nicosia road network in Cyprus
and to investigate how it will behave under different
scenarios.
Initially the road traffic model of Nicosia was
specified, implemented, verified and validated in
VISTA. Models in VISTA are represented by nodes
connected by unidirectional links that represent flow
of traffic in one direction. It is possible to have more
than one link between two nodes to indicate separate
lanes and lane direction. The completed VISTA
simulation model was integrated with an accident
risk assessor implemented in Java. The simulator
provided the risk assessor with the traffic volumes of
all road sections of the network for every 15 min
interval. Traffic volumes along with infrastructural
properties of the network were used by the BN to
assess accident risk on a simulation step basis. For
the development of the BN topology and the
parameterization of its prior knowledge, historical
road accident data were utilized.
3 ARCHITECTURE OF THE ITS
The Road Safety Assessor tool emerged from the
integration of VISTA with BN technologies. The
main components of the tool are: the BN engine, the
accident risk assessor, the VISTA simulator, the data
pre-processor that incorporates the scenario
generator, the results analyzer and the visualizer.
The tool was developed using a component-based
software engineering methodology. With the initial
specification of the system requirements captured,
we proceeded in the identification of suitable
software components that matched the initial system
requirements. These components were subsequently
integrated to implement parts of the system’s
functionality. In particular the Bayesian inference
engine and the visualization components were
selected after thorough investigation. The glue-code
that enabled components integration was
implemented in Java. The risk assessor quantifies
accident risk using a Bayesian inference engine that
utilizes the probabilistic model of accident risks.
Input to the BN assessor is categorized into static
and dynamic. The former is obtained from the
VISTA database and the latter is the output of the
VISTA simulation.
Input to the accident risk assessor is organized in
the form of scenarios. An input scenario to the BN
assessor is defined by the static and dynamic
properties of each road section. Static information is
obtained from the VISTA database and in
combination with the dynamic input from the
simulator. This provides the baseline for generating
a number of plausible test scenario variations for
each road section. Generated scenarios are executed
by the risk assessor to quantify the probability of
accident. The scenario generator is responsible for
generating plausible scenario variations to stress-test
the safety performance of each road section. The
visualizer processes the results and depicts these to
the user graphically. Input scenarios are executed by
AnIntelligentTransportationSystemforAccidentRiskIndexQuantification
319
the BN model. Each scenario evidence is propagated
down the BN topology to produce the posterior
probability of accident risk per scenario.
The integration of the VISTA with the BN model
was realized through asynchronous data interchange.
To establish communication between VISTA and
the risk assessor it was imperative to pre-process
VISTA’s output data prior to being utilized by the
BN in the risk assessor. Specifically, VISTA
variables are continuous by nature, hence, had to be
converted into categorical/discrete to be processed
by the BN model, since it uses only discrete nodes.
Hence, it was necessary to discretize the output from
VISTA prior to instantiating the BN model. For the
discretization process it was necessary to refer to
domain experts that specified the cut-off values for
each variable. Specifically, for traffic volume three
states were defined, namely, low, average and high.
The first corresponding to less than 100 vehicles per
15 time interval, the second to less than 350 and the
last to greater than 350.
4 BN MODEL DEVELOPMENT
Development of BNs requires the specification of
the topology and the conditional probability tables.
To that end historical accident records were obtained
from the traffic safety department of the Cyprus
Police. Preliminary compilation of the data was
performed with the SPSS statistical package to
reduce the dimensionality of the data. The accident
dataset covered all accidents occurred in the Nicosia
area from 2002 until 2008 and comprised over 9000
records. Each record consisted of 43 (six continuous
and 37 categorical) input parameters covering
global, local, temporal, accident, driver and car
characteristics collected at the site of the accident by
the police officers, eye witnesses and the involved
parties. Each record was associated with a single
categorical output parameter pertaining to accident
severity, namely light, severe and fatal, as evaluated
by the police officer at the site of the accident.
However, for the development of the BN model
topology it was imperative to enhance the dataset
with additional information regarding the traffic
conditions of each accident record from VISTA
simulation. Therefore each accident record was
mapped on a geospatial GIS platform and
subsequently import on VISTA to obtain the
dynamic information of each accident location at
different time intervals. This yielded an enhanced
dataset of accident records.
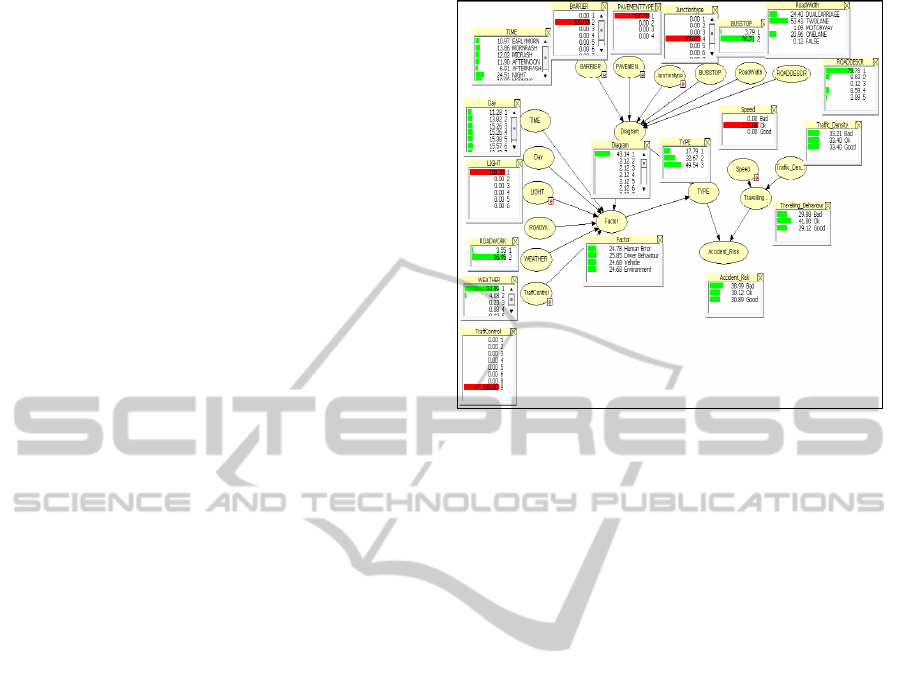
Figure 1: Data inferred BN topology at execution time.
A preliminary analysis of the dataset provided a
generic indication of the influence of each variable
to road accident risk. Data pre-processing was
performed in two steps (a) replacement of missing
and erroneous parameter values by the mean value,
and (b) grouping related values of multi-valued
categorical parameters so as to have a manageable
number of states per parameter. Next, to reduce the
dimensionality of the dataset, Principal Component
Analysis (PCA) was used. This helped to identify
the core variables of the model. Results from the
dimensionality reduction using PCA, yielded 19
variables for the BN topology. The topology
depicted in Figure 1, was learned from processed
dataset using the Expectation Maximisation
algorithm (Jensen, 2001). Figure 1 also shows an
instantiation of the BN model in Hugin researcher
tool. The developed ITS utilises the Hugin engine
using its API. Each variable in this figure is
accompanied by a monitor window that shows its
states. The input evidence is showed as a solid bar in
the monitor window of each variable. Collectively
all variable instantiations correspond to one scenario
variation that is provided by the scenario generator
component of the tool that uses input from VISTA.
In each scenario variation variables that are not
instantiated using input from VISTA is varied
systematically to produce additional scenario
permutations that instantiates the BN model.
To estimate the accuracy of the developed BN
model, validation was performed using the accident
dataset obtained from the police. The dataset was
utilised to identify locations on the network with
high accident frequency. These are the networks
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
320

black spots. These points were used to validate the
model after it was implemented. Specifically, a
subset of the accident dataset was used to validate
the system. Black-spots that were identified using
the dataset, were used to test the BN accuracy under
varying conditions of traffic flow data.
5 RESULTS
Results from the accident risk assessor were used to
calculate the accident risk index (ARI) of each road
section. BN scenarios for each road segment were
labeled accident prone if the BN accident risk
probability was above a pre-specified threshold
value. BN scenarios that fell below the threshold
value were ignored. Scenarios were defined on the
fly by the scenario generator component. Each
segment is evaluated against scenarios that describe
traffic condition at different time intervals and driver
profiles. To assess the ARI it was imperative to
normalize the number of accidents that were
predicted by the BN with the traffic volume per time
interval, for each road section. To that end, the
developed system uses a systematic approach that
utilizes the traffic volume estimates from the VISTA
simulation and the accidents predicted using the BN
risk assessor. Traffic volume acts as a normalizing
factor for the number of accidents predicted using
the BN risk assessor. In this study, the ARI is
defined as:
Accident Risk Index (ARI) = Number of
accidents predicted by the BN/estimated
traffic flow rate per time period of the day,
from DTA
ARI results gave rise to road sections that inherently
have safety issues. These are the network's black
spots. An illustration of the preliminary results
produced by the method is depicted in Figure 2. This
figure illustrates a subset of the results and indicates
that sections with IDs, 3, 21 and 47 have the highest
ARI.
6 CONCLUSIONS
The ITS system described herein illustrates a novel
approach to quantifying road safety using
probabilistic inference expressed in causal
relationships between factors leading to accidents
with DTA simulation. The method escapes from the
problem of traffic data shortage through the use of
DTA simulation. VISTA provides complete traffic
volume data estimates for all road sections of the
network on a 24 hour basis. This constitutes
advancement over existing methods that base their
analysis on limited data obtained from a scarce
number of traffic sensors on the network.
Figure 2: All road section with their ARI values (Y axis).
REFERENCES
Bartley, P., 2008. Traffic Accidents: Causes and
Outcomes. Nova.
Florian, M., Mahut, M., Tremblay, N., 2008. Application
of a simulation-based dynamic traffic assignment
model. European Journal of Operational Research,
189, 1381–1392.
Jensen, F., 2001. Bayesian Networks and Decision
Graphs. Springer.
Peeta, S., Ziliaskopoulos, A., 2001. Foundations of
Dynamic Traffic Assignment: The Past, the Present
and the Future. Networks and Spatial Economics, 1
(3/4), 233-65.
Zheng, X., Liu, M., 2009. An overview of accident
forecasting methodologies. Journal of Loss Prevention
in the Process Industries, 22(4), 484-491.
Ziliaskopoulos, A., Lee, S., 1996. A Cell Transmission
Based Assignment-simulation Model for Integrated
Freeway/Surface Street Systems. Proc., 75th
Transportation Research Board, Annual Meeting,
Washington, DC.
AnIntelligentTransportationSystemforAccidentRiskIndexQuantification
321
