
Video Segmentation based on Multi-kernel Learning and Feature
Relevance Analysis for Object Classification
S. Molina-Giraldo, J. Carvajal-Gonz
´
alez, A. M.
´
Alvarez-Meza and G. Castellanos-Dom
´
ınguez
Signal Processing and Recognition Group, Universidad Nacional de Colombia, Manizales, Colombia
Keywords:
Background Subtraction, Multiple Kernel Learning, Relevance Analysis, Data Separability.
Abstract:
A methodology to automatically detect moving objects in a scene using static cameras is proposed. Using
Multiple Kernel Representations, we aim to incorporate multiple information sources in the process, and em-
ploying a relevance analysis, each source is automatically weighted. A tuned Kmeans technique is employed
to group pixels as static or moving objects. Moreover, the proposed methodology is tested for the classification
of abbandoned objects. Attained results over real-world datasets, show how our approach is stable using the
same parameters for all experiments.
1 INTRODUCTION
A system that monitors an area by camera and de-
tects moving people or objects is called a surveillance
system. Intelligent video surveillance systems can
achieve unsupervised results using video segmenta-
tion, with which the moving objects can be extracted
from video sequences. Many segmentation algo-
rithms have been proposed. Among them, algorithms
with background subtraction usually show superior
performance (Chen et al., 2007). Background sub-
traction is a typical and crucial process for a surveil-
lance system to detect moving objects that may enter,
leave, move or left unattended in the surveillance re-
gion. Unattended objects as bags or boxes in public
premises such as airports, terminal bus and train sta-
tions are a threat for these places because they can
be used as a mean of terrorist attacks, especially for
bombs (Gonz
´
alez et al., 2012).
Image sequences with dynamic backgrounds of-
ten cause false classification of pixels, one common
solution is to map alternate color spaces, however it
has fallen to solve this problem and an enhanced so-
lution is the use of image features, where the distri-
butions at each pixel may be modeled in a paramet-
ric manner using a mixture of Gaussians (Klare and
Sarkar, 2009) or using non-parametric kernel density
estimation (Elgammal et al., 2002). The self organiz-
ing maps have been also explored as an alternative for
the background subtraction task, because of their na-
ture to learn by means of a self-organized manner lo-
cal variations (Maddalena and Petrosino, 2008), how-
ever, these techniques have the drawback of manually
setting a large number of parameters.
In this work, a methodology called Weighted
Gaussian Kernel Video Segmentation (WGKVS) is
proposed, which aims to construct a background
model and then, incorporating multiple information
sources by a MKL framework, performs a back-
ground subtraction enhancing thus the representation
of each pixel. A relevance analysis for the automatic
weight selection of the MKL approach is made. Fur-
thermore, a tuned Kmeans technique is employed to
group pixels as static or moving objects. The pro-
posed WGKVS is tested in the surveillance task of the
classification of abbandoned objects in the scene. In
this regard, using the segmented frame, the objects de-
tected as not belonging to the background model that
are spatially splitted, are relabeled as new indepen-
dent objects and then characterized with the method-
ology implemented in (Gonz
´
alez et al., 2012) for fur-
ther classification.
The remainder of this work is organized as fol-
lows. In section 2, the proposed methodology is de-
scribed. In section 3, the experiments and results are
presented. Finally, in sections 4 and 5 we discuss and
conclude about the attained results.
396
Molina-Giraldo S., Carvajal-González J., M. Álvarez-Meza A. and Castellanos-Domínguez G. (2013).
Video Segmentation based on Multi-kernel Learning and Feature Relevance Analysis for Object Classification.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 396-401
DOI: 10.5220/0004269403960401
Copyright
c
SciTePress

2 THEORETICAL BACKGROUND
2.1 Background Initialization
The first step of the proposed WGKVS is a back-
ground model initialization. Given an image sequence
H
H
H with q frames, we propose to use a subsquence of
frames H
H
H
(t:k)
to initialize a background model based
on the approach exposed in (Gutchess et al., 2001).
This approach, using an optical flow algorithm is
succesfully able to construct a statistical background
model with the most likely static pixels during the
subsequence for each RGB component, and it also
computes its standard deviation. We also propose to
compute a background model using the normalized
RGB components (rgb) in order to supress the shad-
ows casted by the moving objects as described in (El-
gammal et al., 2002). Hence, a background model is
stored in a matrix Y
Y
Y .
2.2 Background Subtraction based on
Multi-kernel Learning and Feature
Representation
Recently, machine learning approaches have shown
that the use of multiple kernels, instead of only one,
can be useful to improve the interpretation of data
(Rakotomamonjy et al., 2008). Given a frame F
F
F from
the image sequence H
H
H and a background model Y
Y
Y ob-
tained from the same sequence, using a set of p fea-
ture representations for each frame pixel f
i
= { f
z
i
:
z = 1,... , p} and each pixel y
i
= {y
z
i
: z = 1, .. ., p} be-
longing to the background model, based on the Multi-
Kernel Learning (MKL) methods (Gonen and Alpay-
din, 2010), a background subtraction procedure can
be computed via the function:
κ
ω
f
z
i
,y
z
j
= ω
z
κ( f
z
i
,y
z
i
), (1)
subject to ω
z
≥ 0, and
∑
p
i=1
ω
z
= 1 (∀ω
z
∈ R). Re-
garding to video segmentation procedures, each pixel
of each frame F
F
F can be represented by a dissimilarity
measure with a background model by using p differ-
ent image features (e.g. Color components, textures),
in order to enhance the performance of further seg-
mentation stages. Specifically, we propose to use the
RGB and the rgb components as features and as basis
kernel κ
{
·
}
, a gaussian kernel G
G
G defined as:
G
G
G
z
( f
z
i
,y
z
i
) = exp
−
1
2
|
f
z
i
− y
z
i
|
σ
z
i
2
!
, (2)
where σ
z
i
corresponds to a percentage of the stan-
dard deviation of pixel y
i
in the feature z from the
background model.
As it can be seen from (1), it is necessary to fix
the ω
z
free parameters, to take advantage, as well as
possible of each feature representation. To complete
the feature space, the row m and column position n
are added as features, in order to keep the local re-
lationships among pixels. Therefore, a feature space
X
X
X
((m×n)×8)
is obtained.
2.3 MKL Weight Selection based on
Feature Relevance Analysis
Using the feature space X
X
X, we aim to select the
weights values ω
z
in MKL by means of a relevance
analysis. This type of analysis is applied to find out a
low-dimensional representations, searching for direc-
tions with greater variance to project the data, such
as Principal Component Analysis (PCA), which is
useful to quantify the relevance of the original fea-
tures, providing weighting factors taking into con-
sideration that the best representation from an ex-
plained variance point of view will be reached (Daza-
Santacoloma et al., 2009). Given a set of features
(η
η
η
z
: z = 1,. .. , p) corresponding to each column of
the input data matrix X ∈ R
r×p
(a set of p fea-
tures describing a pixel image h
i
), the relevance of
η
η
η
z
can be identified as ω
z
, which is calculated as
ω
ω
ω =
∑
d
j=1
λ
j
v
j
, with ω
ω
ω ∈ R
p×1
, and where λ
j
and
v
j
are the eigenvalues and eigenvectors of the covari-
ance matrix V = X
>
X, respectively.
Therefore, the main assumption is that the largest
values of ω
z
lead to the best input attributes. The d
value is fixed as the number of dimensions needed
to conserve a percentage of the input data variability.
Then using ω
ω
ω, a weighted feature space is computed
as:
ˆ
X
X
X = X
X
X ×diag(ω
ω
ω).
2.4 Video Segmentation based on
Kmeans Clustering Algorithm
In order to segment the moving objects, a Kmeans
clustering algorithm with a fixed number of clusters
equal to 2 is employed over
ˆ
X
X
X, hence, the objects that
do not belong to the background model (moving ob-
jects) are groupped in a cluster and the objects that
belong to the background model (static objects) in the
other one. Initially, the clusters are located at the co-
ordinates given by the matrix Q
Q
Q, which is obtained
by the cluster initialization algorithm called maxmin
described in (Cuesta-Frau et al., 2003), making the
segmentation process more stable. Finally, with the
attained labels l
l
l, using a post-process stage, groups of
pixels detected as moving objects that do not surpass
a value u of minimum size for an object are deleted.
VideoSegmentationbasedonMulti-kernelLearningandFeatureRelevanceAnalysisforObjectClassification
397
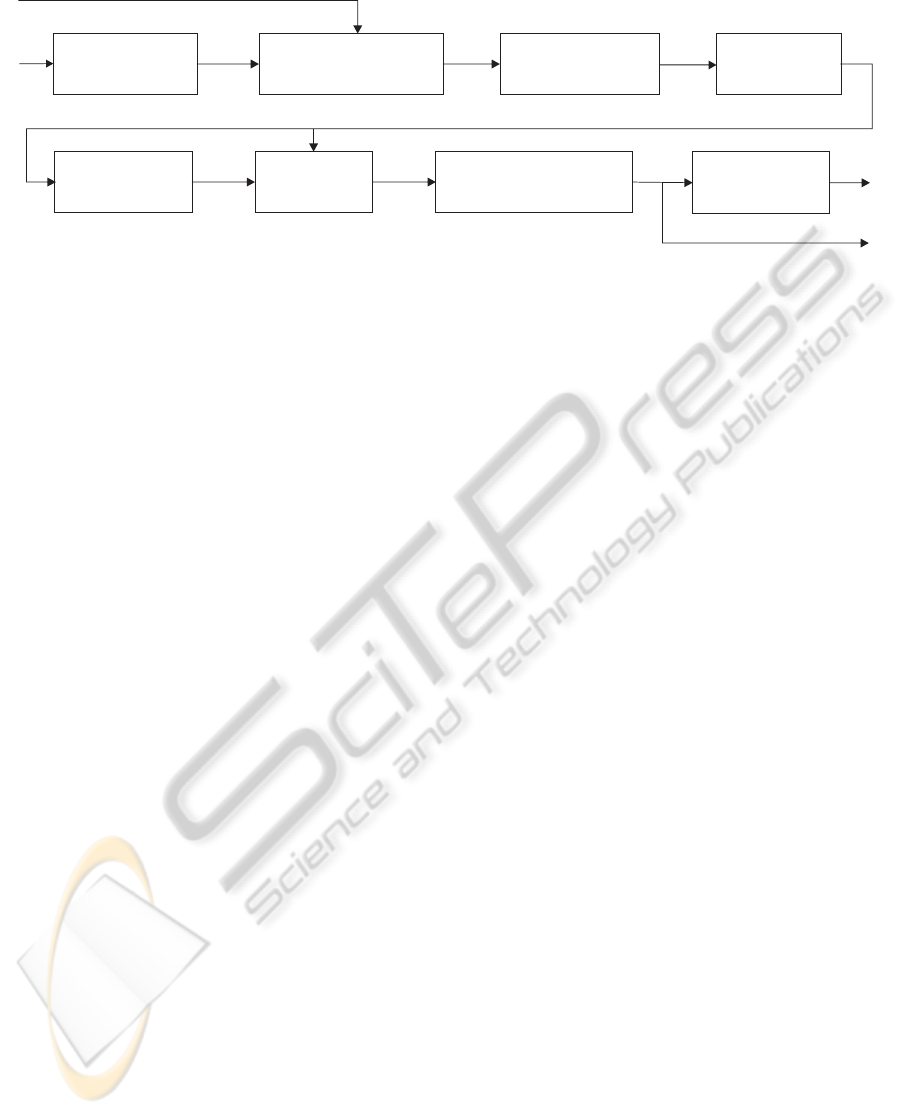
Background
Initialization
H(t : k)
F
Y
P
Relevance
Analysis
X
Cluster
Initialization
X
^
Kmeans
Q
Post-Processing
l
Supervised
Measures
S
φ
Feature
Representation
MKL Background
Subtraction
Figure 1: WGKVS Scheme.
The results are stored into a binary matrix S
S
S. In Fig.
1 is ilustrated the general scheme for WGKVS.
2.5 Quantitative Measures
For measuring the accuracy of the proposed method-
ology for moving object segmentation, three differ-
ent pixel-based measures have been adopted: Re-
call = t
p
/(t
p
+ f
n
), Precision = t
p
/(t
p
+ f
p
) and Sim-
ilarity = t
p
/(t
p
+ f
n
+ f
p
) (Maddalena and Petrosino,
2008), where t
p
(true positives), f
p
(false positives)
and f
n
(false negatives) are obtained while comparing
against a hand-segmented ground truth.
2.6 Object Characterization and
Classification
The WGKVS approach is applied into a real world
surveillance task: the classification of abbandoned
objects. Using the segmented frame S
S
S, the groups
detected as moving objects that are spatially splitted,
are relabeled as new independent objects. With these
new labels, each object is enclosed in a bounding box,
and using the characterization process described in
(Gonz
´
alez et al., 2012), each object is represented by
14 geometrical and 7 statistical features. A Knn clas-
sifier is trained using images belonging to the classes:
people and baggage objects.
3 EXPERIMENTS
The proposed methodology is tested using three dif-
ferent Databases. Each Database includes image se-
quences that represent typical situations for testing
video surveillance systems. Following, the Databases
are described.
A-Star-Perception: This Databse is publicly avail-
able at http://perception.i2r.a-star.edu.sg. It contains 9
image sequences recorded in different scenes. Hand-
segmented ground truths are available for each se-
quence, thus, supervised measures can be used. For
concrete testing, the sequences: WaterSurface, Foun-
tain, ShoppingMall and Hall are used. The first two
sequences are recorded in outdoor scenarios which
present high variations due to their nature, hence
the segmentation process posess a considerable chal-
lenge. The other two sequences are recorded in pub-
lic halls, in which are present many moving objects
casting strong shadows and crossing each other, diffi-
culting the segmentation task.
Left-Packages: Publicly available at http://h-
omepages.inf.ed.ac.uk/rbf/CAVIARDATA1, this
Database contains 5 different image sequences
recorded at an interior scenario which has several
ilumination changes. The main purpose of this
database is the identification of abandoned objects (a
box and a bag). For testing, hand-segmented ground
truths from randomly selected frames are made.
MSA: This Database is publicly available at
http://cvprlab.uniparthenope.it. It contains a sin-
gle indoor sequence, with stable lighting conditions,
nonetheless, strong shadows are casted by the moving
objects. The purpose of this sequence is also the de-
tection of abandoned objects, in this case a briefcase.
Three different experiments are performed, in all
of them, the free parameter σ
z
i
is heuristically set as
5 times the standard deviation of each pixel represen-
tation y
z
i
. The minimum size of a detected moving
object u is set as 0.005 × (m × n).
The first experiment aims to prove the effective-
ness of the proposed WGKVS approach when in-
corporating more information sources into the seg-
mentation process with an automatic weighting se-
lection. To this end, the image sequences Water-
Surface, Fountain, ShoppingMall, Hall, LeftBag and
LeftBox are used. The WGKVS segmentation results
are compared against GKVS (WGKVS with all equal
weights), and traditional GKVS-RGB (GKVS using
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
398
only RGB components). In Fig. 2 are shown the dif-
ferent segmentation results for the frame 1523 of the
sequence WaterSurface. The releavance weights are
shown in Fig. 3. In Tables 1, 2 and 3 are exposed the
attained results for each method.
(a) (b) (c)
(d)
(e)
(f)
Figure 2: WaterSurface (Frame 1523). (a) Background
Model. (b) Original Frame. (c) GKVS-RGB. (d) GKVS.
(e) WGKVS. (f) Ground Truth.
0
0.05
0.1
0.15
0.2
R
G
B
m
n
r
g
b
Figure 3: Relevance Weights for Sequence WaterSurface
(Frame 1523).
Table 1: Segmentation Performance for GKVS-RGB.
Video Recall Precision Similarity
WaterSurface 0.677 0.995 0.676
Fountain 0.509 0.897 0.480
ShoppingMall 0.436 0.385 0.302
Hall 0.489 0.809 0.434
LeftBag 0.610 0.839 0.555
LeftBox 0.697 0.906 0.647
Table 2: Segmentation Performance for GKVS.
Video Recall Precision Similarity
WaterSurface 0.762 0.995 0.759
Fountain 0.559 0.909 0.528
ShoppingMall 0.571 0.680 0.442
Hall 0.518 0.829 0.462
LeftBag 0.614 0.842 0.560
LeftBox 0.699 0.910 0.651
Table 3: Segmentation Performance for WGKVS.
Video Recall Precision Similarity
WaterSurface 0.770 0.994 0.767
Fountain 0.587 0.908 0.552
ShoppingMall 0.643 0.715 0.512
Hall 0.520 0.837 0.473
LeftBag 0.627 0.848 0.571
LeftBox 0.729 0.915 0.674
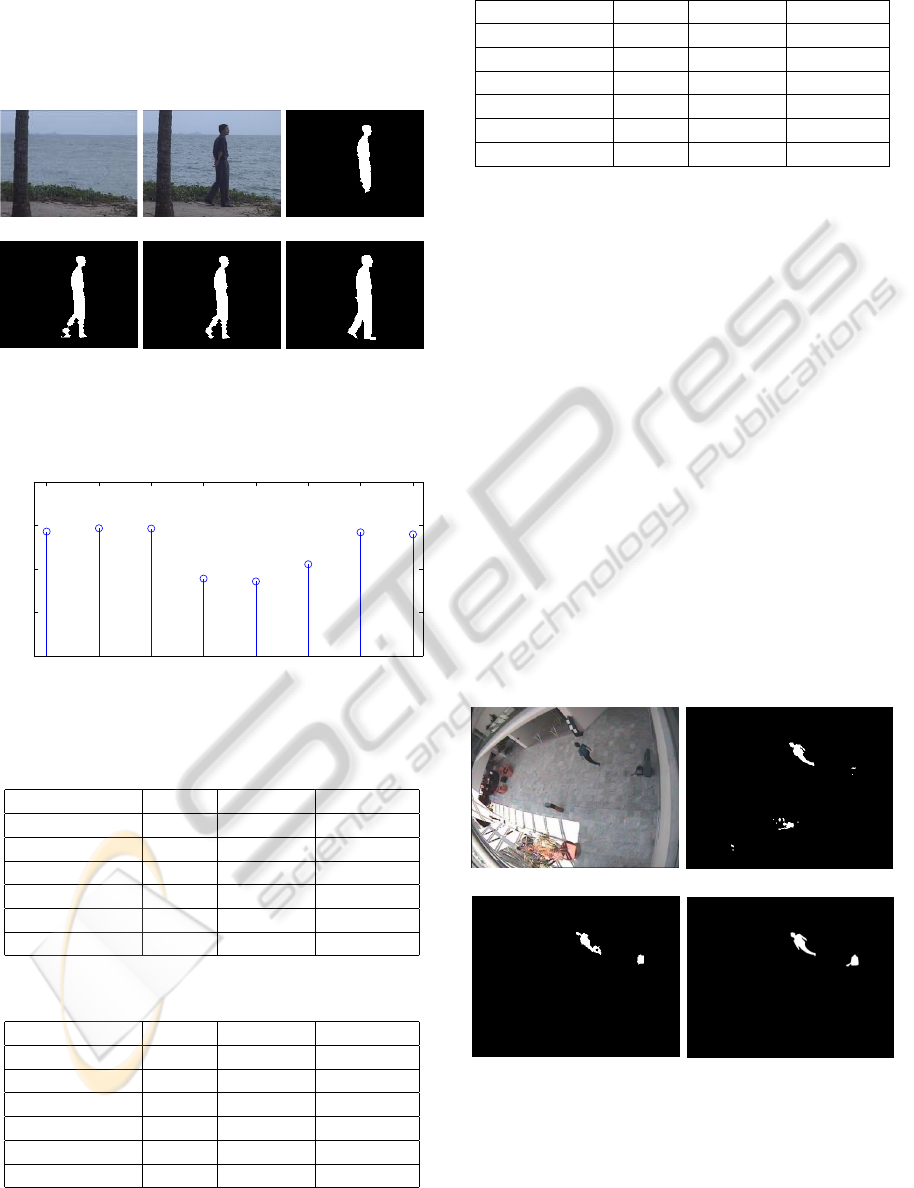
The second type of experiments are performed
to compare the WGKVS algorithm against a
traditional video segmentation algorithm named
Self-Organizing Approach to Background Subtrac-
tion (SOBS), which builds a background model
by learning in a self-organazing manner the scene
variations, and detects moving object by using a
background subtraction (Maddalena and Petrosino,
2008). The SOBS video segmentation approach
has been used as a reference to compare video seg-
mentation approaches and it has been also included
in surveilance systems surveys (Raty, 2010). The
software for the SOBS approach is publicly available
at http://cvprlab.uniparthenope.it/index.php/dow-
nload/92.html. For testing, the 10 parameters of the
SOBS approach are left as default. In Figs. 4 and
5 are the segmentation results using WGKVS and
SOBS for the frame 0996 of the sequence LeftBag
and frame 1980 of the sequence ShoppingMall
respectively. In table 4 are the segmentation results
for the SOBS algorithm.
(a) (b)
(c)
(d)
Figure 4: LeftBag (Frame 0996). (a) Original Frame. (b)
SOBS. (c) WGKVS. (d) Ground Truth.
Finally, the third type of experiment is made in or-
der to test the proposed WGKVS for the classfication
of abbandoned objects. In this sense, the process de-
VideoSegmentationbasedonMulti-kernelLearningandFeatureRelevanceAnalysisforObjectClassification
399

(a) (b)
(c)
(d)
Figure 5: ShoppingMall (Frame 1980). (a) Original Frame.
(b) SOBS. (c) WGKVS. (d) Ground Truth.
Table 4: Segmentation Performance for SOBS.
Video Recall Precision Similarity
WaterSurface 0.709 0.998 0.708
Fountain 0.349 0.971 0.346
ShoppingMall 0.522 0.861 0.482
Hall 0.708 0.888 0.648
LeftBag 0.472 0.642 0.373
LeftBox 0.746 0.806 0.634
scribed in section 2.6 is employed. For testing, the se-
quences: LeftBag, LeftBox and MSA are used. The
aim is to classify objects as: people or baggage ob-
jects (e.g. briefcases, boxes, backpacks, suitcases). A
knn classifier is trained using a dataset of 70 images of
people and 82 images of baggage objects, and as vali-
dation, we use the objects segmented by the WGKVS.
It is important to remark, that the objects from the
dataset used for training are characterized by the same
process. In Fig. 6, are shown some resulting bounded
objects. In total, 38 objects are used in the validation
database, 11 belong to the baggage objects class and
27 to the people class. In Fig. 7, are shown two sam-
ples of the characterization process for a person and a
bag. The classification results are exposed in table 5.
(a)
(b)
(c
)
Figure 6: Segmented Object Samples using WGKVS. (a)
MSA. (b) LeftBag. (c) LeftBox.
(a)
(b)
(
c)
(d)
Figure 7: Geometrical Features Examples. (a) Original Ob-
ject. (b) Corners. (c) Lines. (d) Fitting Shapes.
Table 5: Confusion Matrix using the Knn classifier.
People Baggage Objects
People 21 6
Baggage Objects 1 10
4 DISCUSSION
From the attained results of experiment one, it can be
seen that when working only with the RGB compo-
nents, the method does not perform very good, lack-
ing of extra information that could enhance the clus-
tering process (see Fig. 2(c) and Table 1). When the
rgb components and the spatial information are incor-
porated, the performance improves by a 9.95% of the
similarity measure (see Fig. 2(d) and Table 2). Us-
ing the proposed WGKVS methodology, the best re-
sults are achieved improving the similarity measure
by 4.32% over the GKVS (Fig. 2(e) and Table 3).
The results for the second experiment, expose that the
proposed WGKVS methodology clearly surpass the
attained results of the SOBS algorithm using its de-
fault parameters, and as can be seen in Figs. 4 and 5,
our approach achieves more reliable results for further
stages like the classification of objects. The obtained
segmented objects by the WGKVS for the third ex-
periment (see Fig. 6), are accurate for an adequate
characterization process (see Fig. 7). The latter can
be corroborated with a classification performance of
84.21%. The missclassified samples belonging to the
people class, are objects where the complete body of
the person is not in the scene.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
400

5 CONCLUSIONS
We have proposed a methodology called WGKVS,
which using image sequences recorded by stationary
cameras, segments the moving objects from the scene.
The aim of the proposed WGKVS is to construct a
background model based on an optical flow method-
ology, and using a MKL background subtraction ap-
proach, incorporates different information sources,
each source is weighted using a relevance analysis
and a tuned Kmeans algorithm is used to segment
the resulting weighted feature space. Experiments
showed that the weighted incorporation of the spa-
tial and rgb features enhances the data separability
for further clustering procedures. Moreover, the at-
tained results expose that the proposed WGKVS has
stable results using the same parameters for all the
experiments, and that it is suitable for supporting real
surveillance applications like the classification of ab-
bandoned objects. As future work, the inclussion of
other features which could enhance the process and
a methodology for the automatic actualization of the
background model are to be studied. Furthermore, the
proposed WGKVS is to be implemented as a real time
application.
ACKNOWLEDGEMENTS
This research was carried out under grants provided
by a MSc. and a PhD. scholarship provided by
Universidad Nacional de Colombia, and the project
15795, funded by Universidad Nacional de Colombia.
REFERENCES
Chen, T.-W., Hsu, S.-C., and Chien, S.-Y. (2007). Robust
video object segmentation based on k-means back-
ground clustering and watershed in ill-conditioned
surveillance systems. In Multimedia and Expo, 2007
IEEE International Conference on, pages 787 –790.
Cuesta-Frau, D., P
´
erez-Cort
´
es, J., and Andreu-Garcıa, G.
(2003). Clustering of electrocardiograph signals in
computer-aided holter analysis. Computer methods
and programs in Biomedicine, 72(3):179–196.
Daza-Santacoloma, G., Arias-Londoo, J. D., Godino-
Llorente, J. I., Senz-Lechn, N., Osma-Ruz, V., and
Castellanos-Domnguez, G. (2009). Dynamic feature
extraction: An application to voice pathology detec-
tion. Intelligent Automation and Soft Computing.
Elgammal, A., Duraiswami, R., Harwood, D., and Davis,
L. (2002). Background and foreground modeling us-
ing nonparametric kernel density estimation for visual
surveillance. Proceedings of the IEEE, 90(7):1151–
1163.
Gonen, M. and Alpaydin, E. (2010). Localized multiple
kernel regression. In Proceedings of the 20th Interna-
tional Conference on Pattern Recognition (ICPR).
Gonz
´
alez, J. C.,
´
Alvarez-Meza, A., and Castellanos-
Dom
´
ınguez, G. (2012). Feature selection by rele-
vance analysis for abandoned object classification. In
CIARP, pages 837–844.
Gutchess, D., Trajkovics, M., Cohen-Solal, E., Lyons, D.,
and Jain, A. (2001). A background model initializa-
tion algorithm for video surveillance. In Computer
Vision, 2001. ICCV 2001. Proceedings. Eighth IEEE
International Conference on, volume 1, pages 733–
740. IEEE.
Klare, B. and Sarkar, S. (2009). Background subtraction
in varying illuminations using an ensemble based on
an enlarged feature set. In Computer Vision and Pat-
tern Recognition Workshops, 2009. CVPR Workshops
2009. IEEE Computer Society Conference on, pages
66 –73.
Maddalena, L. and Petrosino, A. (2008). A self-organizing
approach to background subtraction for visual surveil-
lance applications. Image Processing, IEEE Transac-
tions on, 17(7):1168–1177.
Rakotomamonjy, A., Bach, F. R., Canu, S., and Grandvalet,
Y. (2008). SimpleMKL. Journal of Machine Learning
Research, 9:2491–2521.
Raty, T. (2010). Survey on contemporary remote surveil-
lance systems for public safety. Systems, Man, and
Cybernetics, Part C: Applications and Reviews, IEEE
Transactions on, 40(5):493–515.
VideoSegmentationbasedonMulti-kernelLearningandFeatureRelevanceAnalysisforObjectClassification
401
