
Linearizing Controller for Higher-degree Nonlinear Processes with
Compensation for Modeling Inaccuracies
Practical Validation and Future Developments
Pawel Nowak
1
, Jacek Czeczot
1
, Tomasz Klopot
1
, Mateusz Szymura
1
and Bogdan Gabrys
2
1
Silesian University of Technology, Faculty of Automatic Control, Electronics and Computer Science
Institute of Automatic Control, Gliwice, Poland
2
Smart Technologies Research Centre, Computational Intelligence Research Group, Bournemouth University,
Fern barrow, Poole, BH12 5BB, U.K.
Keywords: Adaptive Control, Soft Sensors, Linearizing Control, Practical Validation.
Abstract: This work shows the results of the practical implementation of the linearizing controller for the example
laboratory pneumatic process of the third relative degree. Controller design is based on the Lie algebra
framework but in contrast to the previous attempts, the on-line model update method is suggested to ensure
offset-free control. The paper details the proposed concept and reports the experiences from the practical
implementation of the suggested controller. The superiority of the proposed approach over the conventional
PI controller is demonstrated by experimental results. Based on the experiences and the validation results,
the possibilities of the potential application of the data-driven soft sensors for further improvement of the
control performance are discussed.
1 INTRODUCTION
The application of the linearizing technique for the
control of the higher relative degree nonlinear
processes was extensively studied as a very
promising approach, which provides the general
framework for compensating for the complex
dynamics of the nonlinear processes (Isidori, 1989;
Henson and Seborg, 1997). In summary, this
concept allows for deriving the nonlinear control law
based on the nonlinear model of a process
transformed using the Lie algebra. After assuming
the reference model of the corresponding order, the
final form of the controller is derived, which
compensates for the process nonlinearities and
allows for cancellation of the process higher degree.
The results of the application of this technique to
the control of the processes of the higher relative
degree were reported in a relatively large number of
publications but all of them were based on the
simulation studies. The exceptions are the cases, in
which the linearizing control technique is based on
the simplified first-order dynamical model of a
process - the higher relative degree is compensated
by the proper conservative tuning while the offset-
free control is ensured by the compensation for the
modeling inaccuracies by the application of the
integral action (Lee and Sillivan, 1988; Metzger,
2001) or by the on-line model update (Rhinehart and
Riggs, 1991; Czeczot, 2001).
It must be said that, even if the dynamics of the
real processes usually is of higher relative degree,
the idea of the linearizing technique accounting for
such degree is not popular in the industrial control
applications, due to the following difficulties:
it requires complex mathematical calculations
based on the nonlinear model of a process;
offset-free control is possible only if the
model of a process is perfect;
computational complexity of the linearizing
controller is relatively high.
Another important difficulty that must be faced
when the linearizing control technique is to be
applied in practice is that the measurement data from
the disturbances and from the process state variables
are required. Generally, when the appropriate
sensors are not accessible, these quantities must be
estimated by implementing observers based on the
process model (Albertos and Goowin, 2002;
Kravaris et al., 2013) or by applying suitable data-
driven soft sensors (Fortuna et al., 2007; Lin et al.,
691
Nowak P., Czeczot J., Klopot T., Szymura M. and Gabrys B..
Linearizing Controller for Higher-degree Nonlinear Processes with Compensation for Modeling Inaccuracies - Practical Validation and Future
Developments.
DOI: 10.5220/0005048606910698
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 691-698
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2007; Kadlec et. al 2009). The hybrid approach for
this problem is also possible.
Finally, for the control of the processes of the
higher relative degree r > 1, the difficulties in
controller tuning can be expected. Generally, for
such a case, at least r tuning parameters must be
adjusted and there are no simple methods that can be
easily applied in practice. At the same time, it should
be noticed that the linearizing controller requires the
feedback from higher order time derivatives of the
controlled variable to compensate for the process
dynamics. These r-1 consecutive derivatives must be
computed based on the noisy measurement data.
In this work it is shown how the general
linearizing technique can be applied for the
improved control of the pneumatic process of the
third relative degree. The method for on-line
compensation for modeling inaccuracies is also
suggested that ensures offset-free control. The
experiences and results from the stage of practical
implementation and validation are reported and
discussed. Finally, based on these experiences and
validation results, the potential options for further
improvements are discussed and suggested,
concentrating on the possibilities of the application
of data-driven soft sensors derived from a family of
statistical, computational intelligence and machine
learning approches.
2 CONTROLLER DESIGN
In this paper, the model-based linearizing control of
the nonlinear processes of the higher relative degree
r > 1 is considered. It is assumed that the process is
described by the following standard nonlinear state
equations derived from first principle modelling
where functions F(.) and h(.) are known while x and
d respectively denote the process states and
disturbances:
xhY
udxF
dt
xd
,,
(1)
The control goal is to stabilize the controlled output
Y at the set point Y
sp
by manipulating the input u.
For the model-based linearizing controller
synthesis, after applying Lie algebra (e.g., Isidori,
1989; Henson and Seborg, 1997), the model (1)
should be rearranged into the known part of the
dynamical equation of the r-th order, describing
directly the controlled variable Y:
Y
r
r
RudxYHdxYH
dt
Yd
partknown
21
,,,,
(2)
Due to modelling inaccuracies, any controller
based only on the known part of Eq. (2) cannot
ensure offset-free control without additional
application of the integration of the regulation error
or without any other on-line compensation for
modelling error. Thus, based on the idea of the
Balance-Based Adaptive Control (B-BAC) (e.g.
Czeczot, 2001, 2006) or more generally on the
additive disturbance estimate for Model Predictive
Control (MPC) (e.g. Maciejowski, 2002), the single
additive parameter R
Y
completes the known part of
Eq. (2). R
Y
accounts for modelling inaccuracies
which can be easily and effectively compensated by
on-line estimation of its value.
For the controller design, the r-th order reference
model can be assumed for the closed loop dynamics:
1
1
0
r
k
k
k
ksp
r
r
dt
Yd
YY
dt
Yd
(3)
with
λ
0
.. λ
r-1
denoting the tuning parameters and
then, after substituting
R
Y
by its on-line estimate
Y
R
ˆ
and inversing, the adaptive linearized controller for
the considered process can be derived as:
1
01
1
2
ˆ
,,
,,
k
r
sp k Y
k
k
dY
YY HYxdR
dt
u
HYxd
(4)
The controller (4) potentially is able to
compensate for the process nonlinearities and its
higher order dynamics. It must be implemented
jointly with the estimation procedure for computing
the value of
Y
R
ˆ
and only then it can ensure the
offset-free control. For this purpose, a simple
method can be suggested taking advantage of the B-
BAC methodology (Czeczot, 1998; Stebel
et al.,
2014), using the discretized model (2) and the
measurement data for
Y, x and d. After discretization
of Eq. (2), the following equation can be derived:
,1,2,
,
ˆ
R
i
rr r
RYi T R i ii i
w
r
RYi i
TR Y T H H u
TR
(5)
where
i denotes the i-th sampling, T
R
is the
discretization instant,
Y
r
R
T
represents the r-th
order finite backward difference operator and
ii
ii
dxYHH ,,
1,1
,
ii
ii
dxYHH ,,
2,2
. Due to the
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
692

presence of the measurement noise represented by
the additive error
ε, Eq. (5) is not recommended for
directly calculating the estimate
Y
R
ˆ
and thus the
estimation procedure based on the WRLS (Weighted
Recursive Least-Squares) method is applied to
minimize the influence of this noise on the
estimation accuracy. Eq. (5) defines the measurable
auxiliary variable
w and it has the form of the linear
equation affine to the unknown parameter
Y
R
ˆ
with
the constant regressor (
–T
R
r
). Consequently, it allows
for the application of the simplified scalar discrete-
time form of the WRLS equations where
α(0,1)
denotes the forgetting factor:
1
2
1
i
r
R
i
i
PT
P
P
,
(6a)
1,1,,
ˆˆˆ
iY
r
Rii
r
RiYiY
RTwPTRR ,
(6b)
with the initial values:
P
0
> 0 and freely but
reasonably chosen
0,
ˆ
Y
R
. The dynamical properties
of the estimation procedure (6) are equivalent to the
estimation procedure suggested previously for the
B-BAController in the form dedicated for the
processes of the unitary relative degree (Czeczot,
2006a; Klopot, Czeczot and Klopot, 2012; Stebel et
al., 2014). The accurate estimation is ensured
without necessity of applying any additional
excitation input signals. In fact, even at the steady
state, the estimate
Y
R
ˆ
always converges to its true
value R
Y
with the rate of convergence depending
only on the value of the forgetting factor α. For the
considered case, the significant difference is that the
estimation is based on the higher order dynamical
model and thus the on-line calculation of the
backward finite differences
Y
r
R
T
in Eq. (5) is
required, based on the noisy measurements.
When the controller (4) with the estimation
procedure (6) are to be applied in practice, there are
some difficulties that must be dealt with:
the higher relative degree r > 1 requires
computing higher order time derivatives, both
for the controller (4) and for the estimation
procedure (6) - for this purpose, the backward
finite differences of the respective order can
be applied but then the calculations would be
based on the noisy measurement data of Y;
tuning requires adjusting r parameters λ
0
.. λ
r-1
for the controller (4) and the forgetting factor
α for the estimation procedure (6);
the measurement data for the states x and for
the disturbances d are required; the not
measurable ones should be computed by
applying an observer designed based on the
model (1) (Albertos and Goodwin, 2002;
Kravaris et al., 2013) or as data-driven soft
sensor (Kadlec and Gabrys, 2008; 2009;
Kadlec et al., 2009).
Summarizing, the suggested approach is very
promising and it ensures very good control
performance during the simulation experiments in
the application to a various higher-degree nonlinear
processes. At the same time, from the practical
viewpoint, it requires relatively high computational
effort and it is potentially sensitive to the
measurement noise. Thus, the aim of this paper is to
verify in practice if the application of the controller
(4) with the estimation procedure (6) can improve
the control performance that would be worth such
additional modelling and implementation effort.
3 PRACTICAL VALIDATION
In the paper, the experimental setup of three serially
connected pneumatic tanks presented in Fig. 1 is
considered as the example process to be controlled.
The respective volumes of the tanks are V
1
= 5 [L],
V
2
= 2 [L] and V
3
= 0.75 [L] and the corresponding
relative pressures at each tank are denoted as p
1
, p
2
,
p
3
[bar]. The respective pressure capacities are
denoted as c
pa
, c
pb
and c
pc
[m*s
2
]. The system is
manipulated by the supplying air pressure p
s
[bar]
and the air flows between the tanks through the
constant pneumatic resistances R
pa
, R
pb
, R
pc
[m*s]. In
the last tank, the air flows out through the adjustable
pneumatic resistance R
pd
[m*s] and the relative
pressure outside the tank is denoted as p
4
[bar]. The
supplying relative pressure p
s
is adjustable by the
proportional valve MPPES-3-1 from Festo within
the range 0 - 4 [bar]. All the pressures p
s
, p
1
, p
2
, p
3
are measured on-line by the SDE1 pressure sensors
and the pneumatic resistance R
pd
at the outlet from
the third tank can be changed by automatic
switching between two pneumatic valves of different
resistance. The relative pressure p
4
= 0. The
pneumatic process is connected to the SCADA
system (Golda, 2013) written in zenon from COPA-
DATA and the on-off valves are controlled by the
controller CPX-CEC-C1 from Festo.
LinearizingControllerforHigher-degreeNonlinearProcesseswithCompensationforModelingInaccuracies-Practical
ValidationandFutureDevelopments
693

Figure 1: Pneumatic experimental setup.
For the controller synthesis, the mathematical
model of the process has been derived in the form of
Eqs. (1), assuming laminar flow (Golda, 2013):
3
43323
32
212
21
1
1
1
1
1
pY
R
pp
R
pp
cdt
dp
R
pp
R
pp
cdt
dp
R
pp
R
pp
cdt
dp
pdpcpc
pcpbpb
pbpa
s
pa
(7)
For the chosen operating point, the values of the
model parameters have been identified off-line from
the measurement data as: c
pa
= 6*10
-8
, c
pb
= 2.5*10
-8
,
c
pc
= 1*10
-8
, R
pa
= 0.25*10
8
, R
pb
= 0.6*10
8
,
R
pc
= 12*10
8
and R
pd
= 25 *10
8
. Readers should note
that this linear flow modelling is a simplification
because for some operating regions, the flow in the
real process is nonlinear.
The control goal is defined to stabilize the
pressure Y = p
3
at the set point Y
sp
by manipulating
the supplying pressure u = p
s
. The process is
disturbed by the relative pressure p
4
and by the
outlet pneumatic resistance R
pd
. Its relative degree is
r = 3 and assuming constant disturbances, the model
(7) can be rearranged into the dynamic equation of
the form of Eq. (2), describing the dynamics of the
controlled variable:
Ypdpd
pdpds
RpREYRD
pRCpRBAp
dt
Yd
4
21
3
3
(8)
where the expressions for A, B(R
pd
), C(R
pd
), D(R
pd
),
E(R
pd
) are given in the Appendix. After defining:
,
.
4
211
pRE
YRDpRCpRBH
pd
pdpdpd
(9a)
AH
.
2
,
(9b)
the form of the controller (4) can be directly applied,
jointly with the estimation procedure (6) for the
unknown parameter
R
Y
. Assuming p
4
= 0, this
approach requires the measurement data from the
disturbance
R
pd
and from the other states p
1
, p
2
.
Additionally, based on the measurement data, 1
st
, 2
nd
and 3
rd
order time derivatives of the controlled
pressure
Y = p
3
must be computed numerically.
During practical implementation and validation,
it was assumed that only the relative pressures
u = p
s
and
Y = p
3
are measurable on-line. Additionally, the
values of the disturbing R
pd
for the considered
operating points were approximately identified off-
line from measurement data so they could be
assumed to be known. The moments of the
switching between different values of the disturbing
resistance
R
pd
were known as well.
The suggested controller (4) requires the
measurement data from the relative pressures
p
1
, p
2
which are assumed to be not measurable. Thus, it
was decided to apply the model (7) excited by the
same signals as the real process as the open-loop
observer, to avoid the additional dynamics
introduced by the correction term required for on-
line update of the closed-loop observer. This
approach is justified by the fact that in practice,
when the model is incorrect, the correction term
does not ensure perfect state estimation and this
inaccuracy must be compensated anyway. For the
suggested approach, the estimation procedure
ensures the compensation of any modelling
inaccuracies directly in the control law so the
inaccuracy of the observer is acceptable and there is
no need to introduce the additional dynamics
resulting from the its correction term that yet has to
be tuned.
The first attempt to the practical implementation
was based on the numerical computation of the 1
st
,
2
nd
and 3
rd
order time derivatives of the controlled
pressure
Y = p
3
directly from the measurement data
by successive application of the library functions
DERIVATIVE accessible in the programming
environment CoDeSYS. The results were
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
694
unacceptable because all the pressures are measured
by the sensors equipped with A/D converters of
limited resolution which results in significant and
unpredictable quantization effect that can be
considered as a type of measurement noise.
Consequently, the consecutive time derivatives
computed based on this data vary in a wide range
producing peaks, which is presented in Fig. 2. The
higher order derivatives are corrupted even more and
more significantly and these peaks result in very
large chattering of the manipulated variable
computed by the controller (4), which is
unacceptable.
Figure 2: Example magnified results for computing the 1
st
(second diagram) and 2
nd
(third diagram) time derivatives
of the controlled variable from measurement data of the
original signal (first diagram).
Because the model (7) must be integrated
numerically jointly with the controller (4) and the
estimation procedure (6) (as the open-loop observer)
to provide the required information about the
pressures
p
1
, p
2
, it was decided to substitute the
measurement data of the controlled pressure
p
3
by its
value reconstructed by the model (7) for computing
the consecutive time derivatives. This approach
allows to avoid the quantization effect because the
variations of the modeled pressure
p
3
are smooth.
Consequently, unacceptable chattering in the
manipulated variable disappears and the control
performance of the suggested linearizing controller
is acceptable from the practical viewpoint.
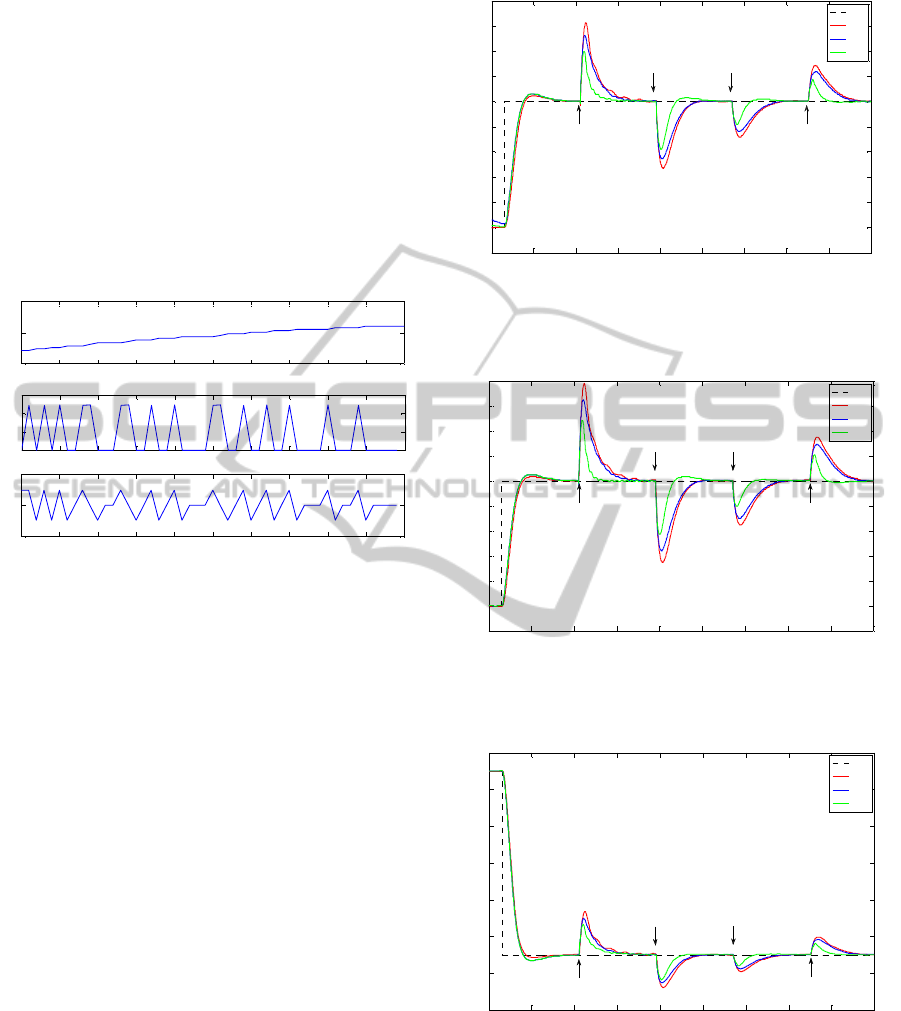
Figures 3 - 5 show the comparative experimental
results for three different operating points defined by
the corresponding set point
Y
sp
. Each experiment
was carried out under the same scenario including
the initial step change of the set point and the
successive step changes of the disturbing resistance
R
pd
applied to the system and shown in all Figures.
Figure 3: Experimental results of the control performance
for the operating point Y
sp
= 1.
Figure 4: Experimental results of the control performance
for the operating point Y
sp
= 1.5.
Figure 5: Experimental results of the control performance
for the operating point Y
sp
= 0.5.
During experiments, the conventional PI
controller was applied as a benchmark, due to its
huge popularity among industrial engineers (it is still
the most frequently used control algorithm in the
existing industrial control loops), even if the
25 25.5 26 26.5 27 27.5 28 28.5 29 29.5 30
0.95
1
1.05
Y = p
3
[bar]
25 25.5 26 26.5 27 27.5 28 28.5 29 29.5 30
0
0.01
0.02
0.03
dY/dt
25 25.5 26 26.5 27 27.5 28 28.5 29 29.5 30
-0.5
0
0.5
time
[
s
]
d
2
Y/dt
2
0 50 100 150 200 250 300 350 400 450
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
time [s]
Controlled variable Y = p
3
[bar]
Control performance
SP
PI
Lin
Linff
t = 105s
Rpd 25 -> 300
t = 285s
Rpd 25 -> 16
t = 195s
Rpd 300 -> 25
t = 375s
Rpd 16 -> 25
0 50 100 150 200 250 300 350 400 450
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
time [s]
Controlled variable Y = p
3
[bar]
Control performance
SP
PI
Lin
Linff
t = 195s
Rpd 300 -> 25
t = 285s
Rpd 25 -> 16
t = 375s
Rpd 16 -> 25
t = 105s
Rpd 25 -> 300
0 50 100 150 200 250 300 350 400 450
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
time [s]
Controlled variable Y = p
3
[bar]
Control performance
SP
PI
Lin
Linff
t = 195s
Rpd 300 -> 25
t = 375s
Rpd 16 -> 25
t = 285s
Rpd 25 -> 16
t = 105s
Rpd 25 -> 300
LinearizingControllerforHigher-degreeNonlinearProcesseswithCompensationforModelingInaccuracies-Practical
ValidationandFutureDevelopments
695

methods for design of the PID-based control loops
are still developing,
e.g. (Åström and Hägglund,
2005; Ang, Chong and Li, 2005; Jin and Liu, 2014).
Initially,
PI controller was tuned for a single
operating point, using the Chien-Hrones-Reswick
tuning method.
Linff represents the suggested
controller with the feedforward action from the
varying value of
R
pd
included in the function H
1
(.)
defined by Eq. (9a) and in the model (7) computed
jointly with the suggested controller.
Lin is the same
controller but without such action where the constant
value of
R
pd
identified for the chosen operating point
is applied for the whole experiment. Initial tuning of
both
Linff and Lin controllers was based on locating
the roots of the characteristic polynomial
s
3
+λ
2
s
2
+λ
1
s+λ
0
as the negative real values to ensure
stable reference model (3) (Henson and Seborg,
1997). Finally, all controllers were retuned manually
to ensure the same tracking properties with possibly
small overregulation to ensure fair comparison
(
k
c
= 1.55, T
I
= 10.03 [s] for PI controller and
λ
2
= λ
1
= 0.7, λ
0
= 0.08 for Linff and Lin controllers).
The forgetting factor for the estimation procedure
(6) was adjusted as
α = 0.95.
The results show the superiority of the suggested
controller. Even
Lin ensures smaller overregulations
for disturbance rejection in comparison with the
benchmark conventional
PI controller. The
application of Linff that incorporates the information
about the variations of the disturbing resistance
R
pd
allows for more significant improvement in the
disturbance rejection by ensuring shorter settling
time and smaller overregulations, with the same
smooth tracking properties.
4 CONCLUSIONS
This paper reports the preliminary results of the
practical validation of the proposed control method
in the application to the example pneumatic process
of the relative degree
r = 3. After assuming the
closed loop reference model of the 3
rd
order, the
linearizing controller is derived based on the
simplified first-principle model. Inclusion of the
higher order time derivatives of the controlled
pressure
Y = p
3
in the control law provides the
compensation for the higher relative degree of the
process dynamics. Potential modelling inaccuracies
in the steady state are compensated by the on-line
estimation of the additive parameter
R
Y
, which
ensures the offset-free control. The simplified first-
principle model of the process must be also
numerically integrated on-line and applied as the
open loop observer to provide the required
information about not measurable states and to
enable computing the higher order time derivatives
of the controlled pressure, which is necessary due to
poor quality of the measurement data.
The experimental results show the practical
applicability of the suggested approach and its
superiority over the conventional
PI controller, even
in the case when there is no feedforward action from
the disturbing pneumatic resistance
R
pd
. Inclusion of
this action additionally improves the control
performance even if the simplified first-principle
model of the process used both for the controller
synthesis and as the open loop observer is simplified
and partially inaccurate.
The practical disadvantage of the proposed
controller is its relatively high mathematical
complexity. It requires possibly accurate first-
principle model that then must be rearranged by
applying Lie algebra into the corresponding higher
order equation describing the dynamics of the
controlled variable. Even for the simplified process
model, the calculations are complex and they
become more complex if the highly nonlinear model
of the process is to be applied for this purpose.
5 FUTURE DEVELOPMENTS
In the considered case, the successful practical
implementation of the suggested adaptive linearizing
controller requires on-line numerical solving of the
simplified model (7) of the process to provide the
information about two not measurable state variables
p
1
, p
2
and about the controlled pressure p
3
that is
measurable but the quality of the measurement data
does not allow for computing the consecutive
required time derivatives.
The model (7) operates as the open-loop
observer and thus its accuracy is of the highest
importance. Especially it is important to ensure
possibly the best compensation for the higher degree
dynamics of the real process in the transients. The
results presented in this work were obtained for the
case when the model (7) is time invariant with the
only exception of the feedback from the
approximately known measurable disturbance
R
pd
.
All modeling inaccuracies are compensated by the
on-line estimation of the additive parameter
Y
R
ˆ
but
in fact, this approach is fully effective only in the
steady state to ensure offset-free control. A surely
much better control performance could be obtained
if the model (7) was additionally adaptively updated
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
696

to ensure possibly highest modeling accuracy of the
process dynamics. For this purpose, a range of data
driven methods for designing the adaptive soft
sensors (Fortuna
et al., 2007; Lin et al., 2007;
Kadlec et. al, 2011) can be considered and combined
with the model (7).
As one of the key aspects of the proposed
method's success is either the availability of the
measurements or their robust estimation procedure
the data driven soft sensors could also be employed
in the case of individual measurements prediction
like in the case of values which are only infrequently
measured (e.g. pressure values
p
1
and p
2
from our
example) or for the smoothing/interpolation
purposes to avoid numerical problems resulting from
the usage of inaccurate hard sensors (e.g. controlled
pressure
p
3
in our example).
There have been great advancements made in the
learning algorithms used for the construction and
adaptation of soft sensors and their multitude of
applications and successful deployments have been
summarized in comprehensive reviews (Lin
et al.,
2007; Kadlec et. al, 2009; Kadlec et. al 2011) and
textbooks, e.g. (Fortuna
et al., 2007). The illustrated
ability to start working with only few historical
samples available (Kadlec and Gabrys, 2010) or to
adapt and provide robust prediction in dynamically
changing environments with noisy measurements
(Kadlec and Gabrys, 2008, 2009, 2011) make the
modern, intelligent soft sensing approaches a very
attractive proposition to combine with model-based
control approaches either as a replacement of the
traditional observers (which require the knowledge
of the plant model) or by providing information
about variables which cannot be measured or can be
measured only infrequently making them of limited
use for control purposes. Such variables can be
modeled and predicted on the basis of other
measurable process variables which soft sensor
techniques successfully exploit. Our future work will
therefore focus on enhancing and robust evaluation
of the proposed nonlinear model-based control
algorithms dedicated for the processes of the higher
relative degree, utilizing a variety of data driven soft
sensing approaches. One possibility is to substitute
the first-principle process model by the data-driven
soft sensor based on the initial off-line learning from
the measurement data and providing the prediction
of the required state and controlled variables. The
other approach could be based on the adaptive data-
driven update of the existing first-principle model to
ensure the on-line compensation for modeling
inaccuracies. In the latter, if the compensation was
accurate, it would be possible to remove the
estimation procedure for the additive parameter
Y
R
ˆ
from the final form of the controller that now
ensures the offset-free control in the presence of the
steady state modeling inaccuracy.
The results presented in this paper show that the
example pneumatic process is of the 3
rd
relative
degree but not very nonlinear. In fact, the simplified
model (7) describes its dynamics with relatively high
accuracy. Apart of what is described above, the
future work will also concentrate on the practical
validation of the suggested control strategy in the
application of the higher order systems with stronger
nonlinearities.
ACKNOWLEDGEMENTS
M. Szymura was supported by the Human Capital
Operational Programme and was co-financed by the
European Union from the financial resources of the
European Social Fund, project no. POKL.04.01.02-
00-209/11. B. Gabrys was supported by funding from
the European Commission within the Marie Curie
Industry and Academia Partnerships and Pathways
(IAPP) programme under grant agreement n. 251617.
The other Authors were supported by the Ministry of
Science and Higher Education under grants:
BKM-UiUA and BK-UiUA.
REFERENCES
Ang K. H., Chong G., Li Y., 2005. PID control system
analysis, design, and technology. IEEE Transactions
on Control Systems Technology, 13(4), 559-576.
Åström K. J., Hägglund T., 2005. Advanced PID design.
Research Triangle Park, NC: ISA-The Instrumentation
Systems and Automation Society.
Albertos P., Goodwin G.C., 2002. Virtual sensors for
control applications. Annual Reviews in Control 26,
101-112.
Czeczot J., 1998. Model-based adaptive control of fed-
batch fermentation process with the substrate
consumption rate application, Proc. of IFAC
Workshop on Adaptive Systems in Control and Signal
Processing, University of Strathclyde, Glasgow,
Scotland, UK, 357-362.
Czeczot J., 2001. Balance-Based Adaptive Control of the
Heat Exchange Process, Proc. of 7
th
IEEE
International Conference on Methods and Models in
Automation and Robotics MMAR 2001, Miedzyzdroje,
Poland, 853-858.
Czeczot J., 2006. Balance-Based Adaptive Control
Methodology and its Application to the Nonlinear
LinearizingControllerforHigher-degreeNonlinearProcesseswithCompensationforModelingInaccuracies-Practical
ValidationandFutureDevelopments
697

CSTR. Chemical Eng. and Processing, 45(5), 359-
371.
Czeczot J., 2006a. Balance-Based Adaptive Control of a
Neutralization Process, International Journal of
Control 79(12), 1581-1600.
Fortuna L., Graziani S., Rizzo A., Xibilia M. G., 2007.
Soft sensors for monitoring and control of industrial
processes. Springer.
Golda P., 2013. Application of HMI/SCADA zenon
environment for visualization and simulation of
pneumatic laboratory setup. B.Sc. Thesis, Silesian
University of Technology, Gliwice, Poland (in polish).
Henson M. A., Seborg D. E., 1997. Nonlinear Process
Control, Prentice Hall PTR.
Isidori A., 1989. Nonlinear Control Systems: An
Introduction, 2
nd
edition. Springer Verlag.
Jin Q. B., Liu Q., 2014. IMC-PID design based on model
matching approach and closed-loop shaping. ISA
Transactions, 53, 462-473.
Kadlec P., Gabrys B., 2008. Adaptive Local Learning Soft
Sensor for Inferential Control Support, Proc. of the
International Conference on Computational
Intelligence for Modelling Control & Automation
CIMCA 2008. Vienna, Austria, 243-248.
Kadlec P., Gabrys B., 2009. Architecture for development
of adaptive on-line prediction models, Memetic
Computing, 1(4), 241-269.
Kadlec P., Gabrys B., 2010. Adaptive on-line prediction
soft sensing without historical data. Proc. of the Int.
Joint Conf. on Neural Networks (IJCNN), Barcelona,
Spain, 1-8.
Kadlec P., Gabrys, B., 2011. Local learning-based
adaptive soft sensor for catalyst activation prediction,
AIChE Journal. 57(5), 1288-1301.
Kadlec P., Gabrys B., Strandt S., 2009. Data-driven Soft
Sensors in the Process Industry, Computers and
Chemical Engineering, 33 (4), 795-814.
Kadlec P., Grbic R., Gabrys B., 2011. Review of
Adaptation Mechanisms for Data-driven Soft Sensing,
Computers and Chemical Engineering. 35 (1), 1-24.
Klopot T., Czeczot J., Klopot, W. 2012. Flexible Function
Block For PLC-Based Implementation of the Balance-
Based Adaptive Controller. Proc. of the American
Control Conference, ACC 2012, Fairmont Queen
Elizabeth, Montréal, Canada.
Kravaris C., Hahn J., Chu Y., 2013. Advances and
selected recent developments in state and parameter
estimation. Computers and Chemical Engineering 51,
111-123.
Lee P.L., Sullivan G.R., 1988. Generic model control
(GMC), Computers and Chemical Engineering 12(6),
573-580.
Lin B., Recke B., Knudsen J. K., Jørgensen, S. B., 2007. A
systematic approach for soft sensor development.
Computers and Chemical Engineering 31(5), 419-425.
Maciejowski J. M., 2002. Predictive control with
constraints. Prentice Hall.
Metzger M., 2001. Easy programmable MAPI controller
based on simplified process model. Proc. of the IFAC
Workshop on Programmable Devices and Systems,
Gliwice, Elsevier, 166-170.
Rhinehart R. R., Riggs J. B., 1991. Two simple methods
for on-line incremental model parameterization,
Computers and Chemical Engineering 15(3), 181-189.
Stebel K., Czeczot J., Laszczyk P., 2014. General tuning
procedure for the nonlinear balance-based adaptive
controller, International Journal of Control, 87(1), 76-
89.
APPENDIX
For the considered pneumatic system, the parameters
of the dynamic model (8) are expressed as follows:
pcpapcpbpa
RRccc
A
2
1
pdpcpbpcpb
pdpc
pcpbpcpb
pcpb
pcpbpapcpbpa
pbpa
pd
RRRcc
RR
RRcc
RR
RRRccc
RR
RB
22
2222
32
233
2
32
322
2
2
1
1
pcpcpb
pdpcpc
pdpc
pdpcpbpcpb
pdpcpcpb
pcpbpcpb
pcpb
pcpbpcpbpa
pd
Rcc
RRc
RR
RRRcc
RRRR
RRcc
RR
RRccc
RC
333
3
3232
)(2
pdpcpc
pdpc
pdpcpcpb
pdpc
pcpbpcpb
pcpb
pd
RRc
RR
RRcc
RR
RRcc
RR
RD
pdpcpcpbpdpcpc
pdpc
pd
RRccRRc
RR
RE
22323
2
1
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
698
