
A Sharp Fitness Function for the Problem of Finding Roots of
Polynomial Equations Systems
Cruz E. Borges
1
, Jose L. Monta
˜
na
2
and Luis M. Pardo
2
1
DeustoTech Labs, Universidad de Deusto, Deusto, Spain
2
Department of Mathematics, Statistics and Computing, Universidad de Cantabria, Santander, Spain
Keywords:
Non Linear Equations, Polynomial Equations, Evolutionary Algorithms.
Abstract:
We experiment with several evolutionary algorithms for solving systems of polynomial equations with real
coefficients. As a main difference with previous work, our algorithms can certify the correctness of the so-
lutions they provide. This achievement is made possible by incorporating results from the field of numerical
analysis to their fitness functions. We have performed an experimental comparison between the various pro-
posed algorithms. The results of this comparison show that evolutionary and other local search algorithms can
deal with the problem of solving systems of polynomial equations even for systems having many variables
and high degree. Our main contribution is a nontrivial fitness function adjusted to the problem to be solved.
This function is not based on any heuristics but on the fundamentals of numerical computation.
1 INTRODUCTION
Solving systems of non linear equations constitutes an
important challenge both in Mathematics and Com-
puter Science. Many problems in a variety of fields
such as engineering, mechanics, medicine, chemistry,
and robotics can be reduced to the problem of solving
a system of non linear equations. Several methods and
strategies have been proposed to address this problem,
but so far one of the simplest cases, solving systems of
polynomial equations with real coefficients, is still an
open problem. Namely, the following remains open:
Problem 1 (Root finding problem for Systems of
Polynomial Equations). Let f
1
= 0,..., f
n
= 0 be a
system of n polynomial functions of degree bounded
by d:
f
1
:=
∑
i
1
,...,i
n
a
i
1
,...,i
n
1
x
i
1
1
···x
i
n
n
.
.
.
f
n
:=
∑
i
1
,...,i
n
a
i
1
,...,i
n
n
x
i
1
1
···x
i
n
n
,
where
∑
n
j=1
i
j
≤ d and a
a
1
,...,i
n
j
∈ R for all j and
i
1
,...i
n
.
The Root finding problem for Systems of Poly-
nomial Equations is to find a point ζ ∈ R
n
such that
f
i
(ζ) = 0 for all i, 1 ≤i ≤ n.
The following is an example of this problem with
three equations and three variables:
Example 2.
f
1
= 5.38 ·10
8
x
6
2
+ 5.03 ·10
8
x
5
2
+ 8.95 ·10
7
x
4
2
−
− 6.25 ·10
13
x
2
1
x
3
+ 5.78 ·10
6
x
3
2
+ 1.07 ·10
5
x
2
2
+
+ 6.17 ·10
2
x
2
+ 1
f
2
= −5.03 ·10
8
x
5
2
−1.79 ·10
8
x
4
2
+ 6.25 ·10
13
x
2
1
x
2
+
+ 1.88 ·10
14
x
2
1
x
3
−1.73 ·10
7
x
3
2
+ 2.03 ·10
7
x
1
x
2
−
− 4.29 ·10
5
x
2
2
−3.09 ·10
3
x
2
−6
f
3
= −5.55 ·10
15
x
2
1
+ 1.11 ·10
16
x
1
x
3
+ 1.8 ·10
9
x
2
+ 1.
The case in which the system has the same number
of equations as variables is one of the most important
and widely studied, both theoretically and in practice
(see, for example, (Dieudonn
´
e, 1985)). In fact, solv-
ing the case in which there are more equations than
unknowns is rewarded with 1 million US dollars by
the Clay Mathematics Institute (P vs NP Millennium
Prize).
2 STATE OF THE ART
Traditionally there are, in addition to heuristics, two
ways of addressing the root finding problem for poly-
nomial systems of equations, the symbolic form (with
294
Borges C., Montaña J. and Pardo L..
A Sharp Fitness Function for the Problem of Finding Roots of Polynomial Equations Systems.
DOI: 10.5220/0005140002940301
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2014), pages 294-301
ISBN: 978-989-758-052-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
exact calculations) and the numerical approximation
(with approximate computations).
2.1 Symbolic and Numerical Methods
The standard way to solve the problem symboli-
cally is via Gr
¨
obner bases (see (Cox et al., 1997;
Becker and Weispfenning, 1993; Giusti et al., 2003)
for an extensive review of this technique). Indeed,
the algorithm described in the above mentioned pa-
pers, despite its doubly exponential complexity, is the
method commonly implemented in symbolic solvers
like Maple
TM
, Mathematica
TM
or Matlab
TM
. In
(Castro et al., 2003), a simply exponential lower
bound for this problem is given (see also (Castro et al.,
2001)). They also give a simple exponential algorithm
for the problem. An implementation can be found
in the symbolic solver Magma
TM
. See (Durvye and
Lecerf, 2008) for the details.
On the other hand, in the framework of numeri-
cal computation, the problem of root finding is solved
using the well known Newton’s method that can be
applied not only to polynomial systems of equations
but also to non linear systems with good derivability
properties. In (Blum et al., 1998) the authors initi-
ated a series of papers with the aim of formalizing
this technique and analyzing its inherent computa-
tional complexity when applied to polynomial sys-
tems. This analysis resulted in the so-called homo-
topy continuation methods. Recently, in another se-
ries of papers (see (Beltr
´
an and Pardo, 2011) for a
survey) the authors provided a probabilistic polyno-
mial time algorithm for the case of systems having
complex coefficients (i.e. looking for complex roots
of systems of polynomials with complex coefficients).
Unfortunately the same techniques presented several
difficulties when applied to the case of systems hav-
ing real coefficients (see (Borges and Pardo, 2008)).
Other alternatives to Newton’s method exist in the lit-
erature: Reduction Methods (see (Grapsa and Vra-
hatis, 2003)) and Interval Methods (see (Hentenryck
et al., 1997) are well studied examples.
2.2 Evolutionary Methods
As it is well known, evolutionary algorithms provide
a simple optimization method that mimics some pro-
cess of biological evolution and, over some particular
problems, can perform better than random or exhaus-
tive search. There are several ways to translate the
problem of root finding into an optimization problem
suitable for applying evolutionary techniques. As an
example, given the polynomial equation f (x) = 0, the
usual way of translating the corresponding root find-
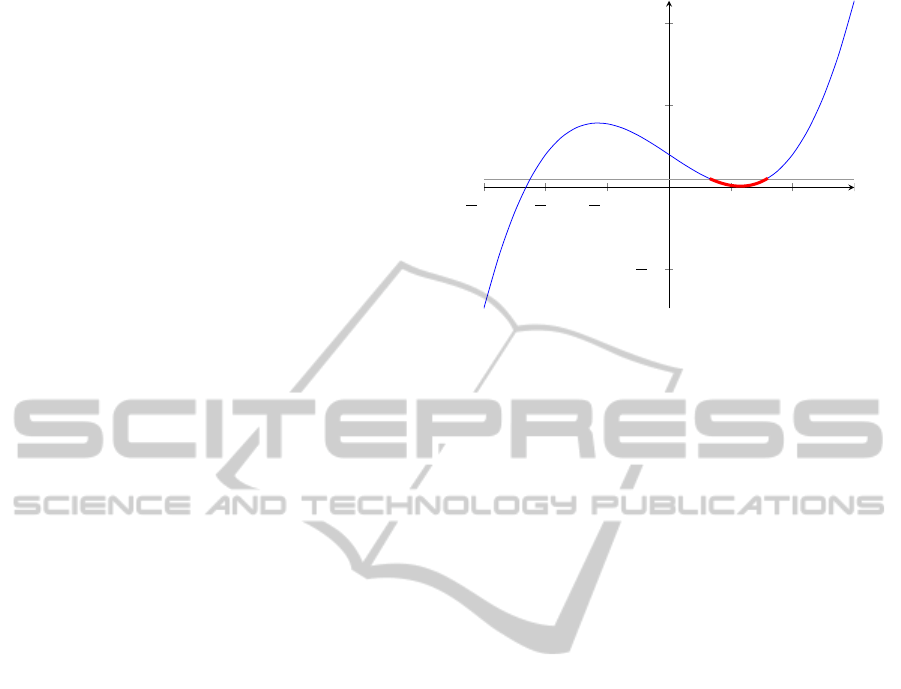
1.5 1 0.5 0.5 1 1.5
1
1
2
Figure 1: Example of a polynomial equation with probably
bad properties.
ing problem into a minimization problem is just to
minimize g(x) = ||f (x)||, where x can take values in
R
n
. Here ||·||denotes the Euclidean norm. This strat-
egy can be easily extended to a system of polynomial
equations. Given f
1
(x) = 0, . . . , f
n
(x) = 0, the corre-
sponding root finding problem is to minimize g(x) =
||f
1
(x)||+ . . . , ||f
n
(x)||. Another natural way of mak-
ing the translation of root finding into an optimiza-
tion problem is to minimize g(x) =
∑
1≤i≤n
[ f
i
(x)]
2
.
This method is described for instance in (Mastorakis,
2005), see also (Kuri-Morales, 2003), and is used in
many situations to solve many particular problems
from a variety of fields. See the works by (Benedetti
et al., 2006), (Tan et al., 2006), (K. Deb and Majum-
dar, 2004) as illustration of this technique. A remark-
able result using a slightly different idea is found in
(Grosan and Ajith Abraham, 2007) where a novel ap-
proach that transforms a system of nonlinear equa-
tions into a multiobjective optimization problem is
presented. The obtained problem is then solved using
the standard Pareto dominance relationship between
solutions and an iterative strategy that evolves some
random solutions in the search for optimal solutions.
The technique uses principles from the evolutionary
computation field and, apparently, is able to approx-
imate the solutions even for large-scale systems of
equations. The objection is that under these reduc-
tions and transformations the method can easily lead
to false roots although it might work in some particu-
lar cases. See, for example, Figure 1. In this case, we
can find a local minimum near 0.5 that is fundamen-
tally far from a real root. We remark that any opti-
mization method based on minimizing some suitable
combination of the original equations cannot certify,
in general, correctness of the provided solutions and
has the same limitations as those pointed out by the
example given in Figure 1 above.
ASharpFitnessFunctionfortheProblemofFindingRootsofPolynomialEquationsSystems
295

3 BACKGROUND AND
SUMMARY OF RESULTS
Because of the limitation for certifying correctness
of the solutions present in the existing evolutionary
methods, we propose –regardless of the evolution-
ary algorithm to be subsequently applied– a thorough
study of the characteristics of the function to be opti-
mized when trying to solve equations. The problem
in its full generality is very difficult to address how-
ever; in the case of systems of polynomial equations,
the theory of approximate zeroes may shed some light
on it.
We recall some elementary notions of numerical anal-
ysis. Given a system of n polynomial equations with
real coefficients and n variables as below,
f
1
(x
1
,...,x
n
) = 0
f
2
(x
1
,...,x
n
) = 0
...
f
n
(x
1
,...,x
n
) = 0
let f : R
n
−→ R
n
, f = ( f
1
,..., f
n
) be the polynomial
function corresponding to such system. In addition let
ζ be a root of f (i.e. f
i
(ζ) = 0, f or 1 ≤ i ≤ n). The
Newton operator is defined as follows.
N
f
(x) := x −D f (x)
−1
f (x),
where D f is the differential of the function f (also
called the Jacobian matrix of f ).
D f =
∂ f
1
∂x
1
...
∂ f
1
∂x
n
...
∂ f
n
∂x
1
...
∂ f
n
∂x
n
As usual D f
−1
denotes the inverse of the matrix D f .
Let x
k
be the point obtained by applying k iterations
of the Newton operator to some initial point x
0
∈ R
n
. We say that x
0
is an approximate zero of ζ if the
sequence x
k
converges quadratically to ζ, i. e. the
following holds for all values of k:
||x
k+1
−ζ|| ≤
1
2
2
k
−1
||x
0
−ζ||.
In the next Section, Theorems 8 and 9, we show that
there exists a function α
∗
( f ,x) having the following
properties:
• α
∗
( f ,x) depends only on the system of equations
f and requires essentially to compute the Jacobian
matrix of f .
• There is a constant α
0
:=
13−3
√
17
4
such that if
α
∗
( f ,x
0
) < α
0
then x
0
is an approximate zero of
f .
• There is a convex bounded region B
f
⊂ R
n
de-
pending only of the function f such that approx-
imate zeroes of f are guaranteed to belong to
B
f
⊂ R
n
.
As a main contribution, our approach avoids the prob-
lem of computing false solutions using α
∗
( f ,x) as fit-
ness function. The precise form in which α
∗
is de-
fined is described in next Section. The way in which
any evolutionary or local search algorithm can com-
pute one or more solutions of a polynomial equations
system is by driving the search trying to minimize the
function α
∗
( f ,x) and using as stopping criterion con-
dition α
∗
( f ,x) < α
0
. The individuals of the evolution-
ary or local search algorithm must belong to region
B
f
.
4 DEFINING THE FUNCTION α
∗
Next theorem in (Blum et al., 1998) characterizes the
points x
0
which are approximate zeroes of a polyno-
mial system of equations:
Theorem 3 (α and γ-Theorem). Let f : R
n
−→R
n
be
a system of polynomial equations, x ∈R
n
and
β( f ,x) := ||D f (x)
−1
f (x)||,
γ( f ,x) := sup
k>1
D f (x)
−1
D
k
f (x)
k!
1
k−1
,
α( f ,x) := β( f , x)γ( f ,x),
D
k
f (x) being the k-th differential map of f in x, ||·||
the Euclidean norm and sup the supreme value. Then,
the following holds:
• There is a constant α
0
:=
13−3
√
17
4
such that if
α( f ,x
0
) < α
0
then x
0
is an approximate zero of
f .
• Let ζ be a root of f , then there is a constant
γ
0
:=
3−
√
7
2
such that for all x
0
∈ R
n
verifying
||x
0
−ζ|| <
γ
0
γ( f ,ζ)
is an approximate zero of f .
The quantities previously defined do not exhibit good
mathematical properties. In addition they are difficult
to compute. In order to overcome these difficulties
Smale introduced the notion of non-linear condition
number µ
norm
(in the same spirit of Turing’s linear
condition numbers of matrices) and did it in the fol-
lowing terms:
Definition 4 (Non linear condition number). Let f be
a system of polynomial equations and x ∈ R
n
. The
non-linear condition number of f at x, µ
norm
( f ,x), is
defined as follows:
µ
norm
( f ,x) := ||(D f (x))
−1
∆||,
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
296

where ∆ is a matrix that depends only on the degrees
of the system f and ||·|| is the usual matrix norm.
The non-linear condition number of f is:
µ( f ) := max
ζ∈V ( f )
µ
norm
( f ,ζ),
where V ( f ) denote the set of all roots of f .
The non linear condition number µ
norm
( f ,x) has bet-
ter mathematical properties than α and γ, mainly or-
thogonal invariance, see (Blum et al., 1998) and ref-
erences therein for more details, and in addition it is
easy to compute. The following theorem gives an es-
timation of its expected value:
Theorem 5. The expected value of the non linear
condition number of a system of polynomial equations
is bounded by:
E[µ( f )] ≤2
√
2C(n + 1)
3/2
ND
π
1/4
,
where N :=
∑
n
i=1
n+d
i
n
, d
i
denotes the degree of the
variable x
i
in the system, D :=
∏
n
i=1
d
i
is the B
´
ezout
number and C is a universal constant such that 5 <
C < 7.
The connection between the non linear condition
number and the previous quantities is summarized in
the following result:
Theorem 6 (µ-theorem). Using the previous nota-
tion:
γ( f ,x) <
D
3/2
2
µ
nomr
( f ,x),
where D is the maximum degree of the variables of the
system f .
Using this bound it is easy to prove the next corol-
lary.
Corollary 7 (Root distances). Using the previous no-
tation, the expected value of the distance d between
any two roots of the system of polynomial equations f
satisfies the following inequality
E(d) >
2u
0
π
1/4
CD
3/2
(ND)
1/4
(n + 1)
3/2
,
where u
0
≈0.05992 and 5 < C < 7 are universal con-
stants.
Proofs of the previously stated results can be found
in (Blum et al., 1998), (Beltr
´
an and Pardo, 2009) and
(Borges and Pardo, 2008).
As we have seen before it is easy to approximate a
true zero provided that we have found an approxi-
mate zero. Hence, using Theorem 3 it is enough to
find a point x in R
n
such that α( f , x) < α
0
. We can
transform this criterion into an optimization problem
in the evolutionary (or local search) sense: the func-
tion to be minimized would be α( f ,x) and the stop-
ping criterion would be “to find a point x such that the
previous bound holds”.
In this situation two problems arise:
1. To find a bounded set in which one can guarantee
that there is an approximate zero and
2. to provide an efficient algorithm to calculate, or at
least to give a bound on, α( f , x).
Solving the first item provides a finite region in
which one can generate the initial population as well
as a limit for all the other populations. Solving the
second item will provide a suitable fitness function.
For solving the first problem we use the following re-
sult.
Theorem 8. With probability 1 −ε the norm of any
root is bounded above by
Γ
1
4
2
D
ε
2
,
where D denotes the B
´
ezout number and Γ(·) is the
hyper-geometric Γ function (see (Gradshte
˘
ın et al.,
2007) for a comprehensive list of its properties).
Due of lack of space and to preserve readability
we omit the proof of this theorem. The main ideas
can be found in (Borges and Pardo, 2008). For the
second problem we show the following result. We
give a short proof in order to illustrate the technique.
Theorem 9 (α
∗
-theorem). Let f be a system of poly-
nomial equations, 0 < ε ≤
1
2
and x ∈ R
n
with norm
bounded by
Γ(1/4)
2
D
ε
2
. We define α
∗
( f ,x) as:
α
∗
( f ,x) := β( f , x)µ
norm
( f ,x) =
=
D
3/2
||x||
2
||D f (x)
−1
f (x)||||D f (x)
−1
∆||,
Then, x
0
is an approximate zero of f with probability
1 −ε if any of the following conditions holds:
α
∗
( f ,x
0
) ≤ α
0
or α
∗
c
( f ,x
0
) := α
∗
( f ,x
k
) ≤ α
0
,
x
k
denotes the k-th iteration of the Newton operator.
Here k has order
k ∈O
loglog
(Dn)
3/2
N
1/4
D
5/4
ε
5/2
!!
,
where D denotes the maximum degree of the system f ,
d
i
denotes the degree of the variable x
i
in the system,
N :=
∑
n
i=1
n+d
i
n
, D is the B
´
ezout number and α
0
is
the constant defined in Theorem 3.
ASharpFitnessFunctionfortheProblemofFindingRootsofPolynomialEquationsSystems
297

Proof. The first part is trivial. Let us suppose that
the first condition holds, i.e. α
∗
( f ,x
0
) ≤ α
0
. Then,
using the bounds given in Theorem 6, we conclude
that α( f ,x
0
) ≤ α
∗
( f ,x
0
) < α
0
; as a consequence we
realize that x
0
is an approximate zero.
Let us suppose now that α
∗
( f ,x
0
) > α
0
but
α( f ,x
0
) ≤ α
0
. In this case, x
0
is a true approxi-
mate zero hence the iteration of the Newton’s operator
N
k
f
(x
0
) converges quadratically to a root ζ. Hence we
have
α
∗
( f ,x
k
) ≤
D
3/2
2
1
2
2
k
−1
||x
0
−ζ||µ
norm
( f ,x
0
)
Let 0 < ε ≤
1
2
, using Corollary 5 and Corollary 8
we have:
• µ
norm
( f ,x
0
) is bounded, with probability 1−ε, by:
µ
norm
( f ,x
0
) ≤C(n + 1)
3/2
ND
4π
1/4
,
where C is the constant defined in Corollary 5.
• ||x
0
−ζ|| is bounded, with probability 1 −ε, by:
||x
0
−ζ|| ≤
Γ
1
4
2
D
ε
2
,
ζ is the root for which the iteration converges and
Γ is the usual Γ function.
After k ≥ loglog
L(D(n + 1))
3/2
N
1/4
D
5/4
ε
−5/2
we
have that α
∗
( f ,x
k
) < α
0
and as a consequence, x
k
is
an approximate zero. Note that here L is the universal
constant
L :=
α
0
Γ
1
4
2
C
(4π)
1/4
.
Observe that both functions α
∗
and α
∗
c
can be easily
computed. Moreover, the previous result gives an al-
ternative version of Theorem 3. Hence we can use α
∗
c
as fitness function.
5 EVOLUTIONARY
ALGORITHMS
In this section we present several evolutionary and lo-
cal search algorithms that use the results to approxi-
mate zeros of a system of polynomial equations with
real coeffuicients. Listing 1 presents in a homoge-
nized way some common evolutionary an local search
techniques. We choose the operators of the evolution-
ary/local search algorithm following four of the tradi-
tional evolutionary/local search methods: Evolution
Listing 1: Pseudocode of an Evolutionary Algorithm. Note
that t represents the current generation, T represents the
maximum number of generations, op
1
and op
2
represent
the probability of using Operator
1
and Operator
2
respec-
tively and finally m
1
, m
2
and m
r
represent the number of in-
dividuals needed to perform the Operator
1
, Operator
2
and
the Reproduction Operator respectively.
1 g e n e r a t e i n i t i a l p o p u l a t i o n p
0
compute f i t n e s s o f p
0
3 elite := b e s t i n d i v i d u a l o f p
0
t : = 1
5 w h i l e ( t < T ) or ( fo u n d s o l u t i o n ? )
p
aux
: = empty p o p u l a t i o n
7 f o r i i n 1 t o l e n g t h p
t−1
aux : = empty s e t of i n d i v i d u a l s
9 r := random number i n [ 0 , 1 ]
s w i t c h r
11 c a s e 0 ≤ r ≤ op
1
s e l e c t i n d i v i d u a l s a
1
,. .. , a
m
1
13 aux : = O p e r a t o r
1
o v e r
a
1
,. .. , a
m
1
15 end c a s e
c a s e op
1
< r ≤ op
2
17 s e l e c t i n d i v i d u a l s a
1
,. .. , a
m
2
aux : = O p e r a t o r
2
o v e r
19 a
1
,. .. , a
m
2
end c a s e
21 c a s e op
2
< r ≤ 1
aux : = s e l e c t a
1
,. .. , a
m
r
23 end c a s e
end s w i t c h
25 compute f i t n e s s o f aux
r e p r o d u c t i o n : =
27 s e l e c t i o n ( aux , i n d i v i d u a l s )
p
aux
: = p
aux
∪ r e p r o d u c t i o n
29 end f o r
p
aux
: = p
aux
∪ elite
31 elite : = b e s t i n d i v i d u a l o f p
aux
p
t
: = p
t−1
33 t : = t +1
end w h i l e
Strategy (Michalewicz and Schoenauer, 1996), Sim-
ulated Annealing (Laarhoven and Aarts, 1987), Dif-
ferential Evolution (Price et al., 2005) and Particle
Swarm Optimization (Poli, 2008). See (Koza, 1992)
and the following references for a more complete de-
scriptions of these algorithms. Next follows a more
detailed description.
ESα Evolution Strategy: Operator
1
and Operator
2
are respectively the arithmetic crossover and
non uniform mutation operator (see (Michalewicz
et al., 1994)). Given two parents p
1
, p
2
∈ R
n
the
arithmetic crossover produces the children c
1
and
c
2
according to the following expressions:
c
1
= λp
1
+ (1 −λ)p
2
c
2
= λp
2
+ (1 −λ)p
1
,
where λ is a random number in [0,1]. For the
non uniform mutation operator, given p ∈ R
n
and
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
298

[a,b]
n
the bounds given by Lemma 8 below, this
operator produces a child c = (c
1
,...,c
n
) ran-
domly chosen among the following two cases:
c
k
= p
k
+ ∆(t, b − p
k
) c
k
= p
k
−∆(t, p
k
−a),
for all k = 1,...,n, where t is the actual generation
and ∆ is defined as:
∆(t,y) := yr
1 −
t
T
,
r is a random number in [0, 1] and T is the maxi-
mum number of generations.
The selection of the individuals is a 2-tournament
selection and the reproduction step is based in a
raking scheme where the best two (or one in the
case of the mutation operator) different individ-
uals between parents and children survive in the
next generation. This procedure preserves diver-
sity of the population. Finally the elitist operator
takes the best individual of the previous genera-
tion and places it in the current one. See (Koza,
1992) for a more detailed description of all these
operators.
SA Simulated Annealing: The principal difference
between this algorithm and the previous one lies
in the reproduction operator: when children are
better than the parents, the best one passes to the
next generation but when they are worse they can
still pass with hight probability (0.9). The rest of
the operators behave as in ESα.
DE Differential Evolution: The difference between
this algorithm and the Evolution Strategy lies
in its first operator. Instead of using the arith-
metic crossover it uses the so called differential
crossover: given three parents p
1
, p
2
and p
3
∈R
n
,
the differential crossover produces the following
child:
c = p
1
+ λ(p
2
−p
3
),
where λ is a random number in [0,1]. The remain-
ing operators behave in the same way a ESα.
PSO Particle Swarm Optimization: In this algorithm
the crossover an the elitist operators are as fol-
lows. Instead of preserving the best element of the
population (that we denote by p
e
) we preserve, for
every position i in the population, the best element
that has held this position. We denote this element
by p
e
i
. Given a parent p
i
∈R the child c
i
produced
by the swarm crossover is:
c
i
= λ
1
p
i
+ λ
2
(p
e
i
−p
i
) + λ
3
(p
e
−p
i
),
where λ
1
, λ
2
and λ
3
are random numbers in [0,1].
6 EXPERIMENTAL RESULTS
In order to experiment with the algorithm we have
carried an extensive test in a Core 2 Duo SU4100 with
4 GB of RAM using a Gentoo operating system up to
date.
• We have tested the algorithms with systems of
sparse and dense polynomials. We represent
sparse polynomials by means of Straight Line
Programs (see (Giusti et al., 1998) for an exhaus-
tive reference of this data structure and (Alonso
et al., 2009) for an introductory reference to their
use as an artificial intelligence tool). Dense en-
coding is as usual, i.e. the vector of coefficients.
• We have randomly generated 100 systems in ev-
ery case. For the dense encoding we have gener-
ated every coefficient as a normal random variable
with mean 0 and variance 1. In the sparse case we
have used the method described in (Alonso et al.,
2009).
• We have experimented with systems having the
same number n ∈ {3, 5, 7, 10} of variables as
equations. The degree was at least 2 in the sparse
case and at least 3 in the dense case. Note that in
the last case, the number of roots of the polynomi-
als could be {27, 243, 2187, 59049} and the num-
ber of coefficients would be {60, 280, 840, 2860}.
• The executions finish after 100 generations or
when an approximate zero was found.
• The probability of operator
1
has been set to 0.9
and the probability of operator
2
to 0.05 so that the
reproduction probability is 0.05. In the case of the
Simulated Annealing algorithm the probabilities
have been reversed.
• The population has been set to 100 individuals.
• All of our methods are elitist, so we add the best
individual of the previous generation to the next
one.
• We have also implemented an evolution strategy
using the Euclidean norm of the evaluated poly-
nomial as the fitness function. In the following
tables we have denoted this algorithm by ES||·||.
We also wanted to compare our algorithms with
the symbolic algorithm used in Matlab
TM
but in the
case n = 3, using dense encoding of polynomials it
takes more than 10 hours to solve only one of the sys-
tems of equations we have generated, even using a
very powerful machine.
The experimental results for both the sparse and
the dense encoding are quite similar although they
present some remarkable differences. In Table 1 we
present the results for the sparse encoding case. As
ASharpFitnessFunctionfortheProblemofFindingRootsofPolynomialEquationsSystems
299

Table 1: Results using sparse encoding.
(a) Successful runs (%).
n PSO DE SA ESα ES||·||
3 83% 83% 83% 79% 68%
5 95% 81% 78% 56% 31%
7 92% 68% 68% 21% 9%
10 90% 33% 41% 16% 3%
(b) Execution time (s).
n PSO DE SA ESα ES||·||
3 2.18 2.23 2.21 2.3 0.2
5 2.57 7.3 6.91 6.44 0.48
7 8.87 25.36 21.83 23.74 0.79
10 29.14 78.45 72.09 83.5 1.3
Table 2: Results using dense encoding.
(a) Successful runs (%).
n PSO DE SA ESα ES||·||
3 100% 100% 100% 100% 75%
5 100% 91% 88% 28% 26%
7 100% 0% 1% 0% 2%
10 100% 0% 0% 0% 0%
(b) Execution time (s).
n PSO DE SA ESα ES||·||
3 0.04 0.02 0.02 0.02 0.02
5 0.25 1.39 0.83 0.5 0.06
7 2.9 29.21 29.04 29.91 0.21
10 30.35 174.28 174.68 179.86 0.99
it can be seen all methods perform quite well in the
first two cases (n = 3 and n = 5) but their success rate
starts to decrease quickly with exception of the Parti-
cle Swarm Optimization method (PSO). Note that the
Evolution Strategy (ES||·||) is the fastest one but also
it presents the worst success rate and very often re-
ports false solutions. This good execution time is due
to the simplicity of its fitness function.
In Table 2 we display the results for the dense en-
coding case. In this case the particle swarm optimiza-
tion algorithm has exhibited a remarkable success rate
while for the other methods the performance is quite
week.
The differences in the execution time between
each group of problems (sparse and dense encodings)
are due to the different programming tools used in
each case. While for the dense encoding very fast and
specific classes were used, in the sparse case we have
used a general purpose and slow library. In all cases,
algorithms performed quite fast when compared with
the symbolic solution provided by Matlab
TM
. We also
want to remark that the traditional Evolution Strategy
had a better behavior than expected, however some
false solutions were detected.
7 CONCLUSIONS AND FUTURE
WORK
Our experimentation supports the idea that most com-
mon evolutionary algorithms and local search tech-
niques can deal quite well with the problem of solv-
ing randomly generated polynomial equation systems
if the α
∗
fitness functions is used. The two main fea-
tures of the α
∗
fitness function are:
• it seems to work well in practice with any reason-
able evolutionary or local search technique,
• it can certify the correctness of the provided solu-
tions just by checking an inequality which is eas-
ier and more robust, when performing numerical
computations, than checking zero equalities.
To our knowledge this last feature makes α
∗
differ-
ent from any other fitness function previously used to
solve polynomial equation systems. Experimentation
with systems coming from specific fields has been de-
liberately excluded since our goal was to show that
the α
∗
function ”generically” works. Application to
real world problems is part of a future development
that requires an extensive comparison with a variety
of heuristics designed ad hoc for the problems they
try to solve and is out of the scope of this paper.
A main future development will be to extend the pro-
posed method to analytic functions. There are several
extensions of the α-theorem (see for example (Dedieu
and Kim, 2002) or (Dedieu et al., 2003)) but the
equivalent to our α
∗
-theorem and bounds ensuring the
existence of at least one root of the system in certain
bounded regions is not clear in this more general con-
text.
ACKNOWLEDGEMENTS
This work is partially supported by spanish grant
TIN2011-27479-C04-04.
REFERENCES
Alonso, C., Monta
˜
na, J., Puente, J., and Borges, C. (2009).
A New Linear Genetic Programming Aproach Based
on Straight Line Programs: Some Theoretical and Ex-
eperimental Aspects. International Journal on Artifi-
cial Intelligence Tools, 18(5):757–781.
Becker, T. and Weispfenning, V. (1993). Gr
¨
obner Bases,
Graduate Texts in Mathematics. Springer-Verlag,
New York.
Beltr
´
an, C. and Pardo, L. (2009). On Smale’s 17 Problem:
Average Polynomial Solver for Affine and Proyective
Solutions. J.Amer. Math. Soc., 22:363–385.
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
300

Beltr
´
an, C. and Pardo, L. (2011). Fast linear homotopy to
find approximate zeros of polynomial systems. Found.
Comput. Math., 11(1):95–129.
Benedetti, A., Farina, M., and Gobbi, M. (2006). Evolu-
tionary multiobjective industrial design: the case of a
racing car tire-suspension system. IEEE Trans. Evo-
lutionary Computation, 10(3):230–244.
Blum, L., Cucker, F., Shub, M., and Smale, S. (1998). Com-
plexity and Real Computation. Springer-Verlag, New
York.
Borges, C. and Pardo, L. (2008). On the Probability Distri-
bution of Data at Points in Real Complete Intersection
Varieties. Journal of Complexity, 24(4):492–523.
Castro, D., Giusti, M., Heintz, J., Matera, G., and Pardo,
L. M. (2003). The hardness of polynomial equation
solving. Foundations of Computational Mathematics,
3(4):347–420.
Castro, D., Pardo, L., H
¨
agele, K., and Morais, J. (2001).
Kronecker’s and newton’s approaches to solving: A
first comparison. J. Complexity, 17(1):212–303.
Cox, D., Little, J., and O’Shea, D. (1997). Ideals, Varieties,
and Algorithms. Undergraduate Texts in Mathemat-
ics. Springer-Verlag, New York.
Dedieu, J., Priouret, P., and Malajovich, G. (2003). New-
ton’s method on riemannian manifolds: covariant al-
pha theory. IMA Journal of Numerical Analysis,
23(3):395–419.
Dedieu, J.-P. and Kim, M.-H. (2002). Newton’s method
for analytic systems of equations with constant rank
derivatives. Journal of Complexity, 18(1):187 – 209.
Dieudonn
´
e, J. (1985). History of Algebraic Geometry: An
Outline of the History and Development of Algebraic
Geometry. Chapman & Hall.
Durvye, C. and Lecerf, G. (2008). A concise proof of
the Kronecker polynomial system solver from scratch.
Expositiones Mathematicae, 26(2):101–139.
Giusti, M., Heintz, J., Morais, J., Morgenstern, J., and
Pardo, L. (1998). Straight-line programs in geomet-
ric elimination theory. Journal of Pure and Applied
Algebra, 124(1–3):101–146.
Giusti, M., Pardo, L., and Weispfenning, V. (2003). Al-
gorithms of Commutative Algebra and Algebraic Ge-
ometry: Algorithms for Polynomial Ideals and Their
Varieties, Handbook of Computer Algebra. Springer
Verlag.
Gradshte
˘
ın, I., Ryzhik, I., Jeffrey, A., and Zwillinger, D.
(2007). Table of integrals, series and products. Aca-
demic Press. Academic.
Grapsa, T. N. and Vrahatis, M. N. (2003). Dimension reduc-
ing methods for systems of nonlinear equations and
unconstrained optimization: A review. A Review, Re-
cent Adv. Mech. Related Fields, pages 215–225.
Hentenryck, P. V., Mcallester, D., and Kapur, D. (1997).
Solving polynomial systems using a branch and prune
approach. SIAM Journal on Numerical Analysis,
34:797–827.
K. Deb, K. Mitra, R. D. and Majumdar, S. (2004). Towards
a better understanding of the epoxy-polymerization
process using multi-objective evolutionary computa-
tion. Chem. Eng. Sci., 59(20):4261–4277.
Koza, J. (1992). Genetic Programming: On the Program-
ming of Computers by Means of Natural Selection.
The MIT Press.
Kuri-Morales, A. (2003). Solution of simultaneous non-
linear equations using genetic algorithms. In WSEAS
Transactions on SYSTEMS, Issue 1, vol. 2, pages 44–
51.
Laarhoven, P. and Aarts, E., editors (1987). Simulated an-
nealing: theory and applications. Kluwer Academic
Publishers, Norwell, MA, USA.
Mastorakis, N. E. (2005). Solving non linear equations via
genetic algorithms. In Proceedings of the 6th WSEAS
Int. Conf. on EVOLUTIONARY COMPUTING, pages
24–28.
Michalewicz, Z., Logan, T., and Swaminathan, S. (1994).
Evolutionary operators for continuous convex param-
eter spaces. In Proceedings of the 3
rd
Annual Con-
ference on Evolutionary Programming, pages 84–97.
World Scientic.
Michalewicz, Z. and Schoenauer, M. (1996). Evolution-
ary algorithms for constrained parameter optimization
problems. Evolutionary Computation, 4:1–32.
Poli, R. (2008). Analysis of the publications on the appli-
cations of particle swarm optimisation. J. Artif. Evol.
App., 2008:1–10.
Price, K., Storn, R., and Lampinen, J. (2005). Differential
Evolution: A Practical Approach to Global Optimiza-
tion. Springer, 1 edition.
Tan, K. C., Yang, Y. J., and Goh, C. K. (2006). A distributed
cooperative coevolutionary algorithm for multiobjec-
tive optimization. IEEE Trans. Evolutionary Compu-
tation, 10(5):527–549.
ASharpFitnessFunctionfortheProblemofFindingRootsofPolynomialEquationsSystems
301
