
A New Robust Color Descriptor for Face Detection
Eyal Braunstain and Isak Gath
Faculty of Biomedical Engineering, Technion - Israel Institute of Technology, Haifa, Israel
Keywords:
Face detection, Object recognition, Descriptors, Color.
Abstract:
Most state-of-the-art approaches to object and face detection rely on intensity information and ignore color
information, as it usually exhibits variations due to illumination changes and shadows, and due to the lower
spatial resolution in color channels than in the intensity image. We propose a new color descriptor, derived
from a variant of Local Binary Patterns, designed to achieve invariance to monotonic changes in chroma. The
descriptor is produced by histograms of encoded color texture similarity measures of small radially-distributed
patches. As it is based on similarities of local patches, we expect the descriptor to exhibit a high degree of
invariance to local appearance and pose changes. We demonstrate empirically by simulation the invariance
of the descriptor to photometric variations, i.e. illumination changes and image noise, geometric variations,
i.e. face pose and camera viewpoint, and discriminative power in a face detection setting. Lastly, we show
that the contribution of the presented descriptor to face detection performance is significant and superior to
several other color descriptors, which are in use for object detection. This color descriptor can be applied in
color-based object detection and recognition tasks.
1 INTRODUCTION
Most object and face detection algorithms rely on
intensity-based features and ignore color information.
This is usually due to its tendency to exhibit varia-
tions due to illumination changes and shadows (Khan
et al., 2012a), and also to the lower spatial resolution
in color channels than in the intensity image (e.g. the
works of (Viola and Jones, 2004; Mikolajczyk et al.,
2004; Zhang et al., 2007; Li et al., 2013)). Face detec-
tion performance by a human observer declines when
color information is removed from faces (Bindemann
and Burton, 2009). It has been argued that a detector
which is based solely on spatial information derived
from an intensity image, e.g. histograms of gradients,
may fail when the object exhibits changes in spatial
structure, e.g. pose, non-rigid motions, occlusions
etc. (Wei et al., 2007). Specifically, an image color
histogram is rotation and scale-invariant.
We hereby review the topic of color representa-
tions and descriptors for object detection. Color in-
formation has been successfully used for object detec-
tion and recognition (Khan et al., 2012a; Gevers and
Smeulders, 1997; Weijer and Schmid, 2006; Diplaros
et al., 2006; Khan et al., 2013; Van de Sande et al.,
2010; Wei et al., 2007; Khan et al., 2012b).
Color can be represented in various color spaces,
e.g. RGB, HSV and CIE-Lab, in which uniform
changes are perceived uniformly by a human observer
(Jain, 1989). Various color descriptors can be de-
signed. The color bins descriptor (Wei et al., 2007)
is composed of multiple 1-D color histograms by pro-
jecting colors on a set of 1-D lines in RGB space at
13 different directions. These histograms are concate-
nated to form the color bins features.
Two color descriptors were examined by (Wei-
jer and Schmid, 2006) for object detection, the Ro-
bust Hue descriptor, invariant with respect to the il-
luminant variations and lighting geometry variations
(assuming white illumination), and Opponent Angle
(OPP), invariant with respect to illuminant and dif-
fuse lighting (i.e. light coming from all directions).
The trade-off between photometric invariance and
discriminative power was examined in (Khan et al.,
2013), where an information theoretic approach to
color description for object recognition was proposed.
The gains of photometric invariance are weighted
against the loss in discriminative power. This is done
by formulation of an optimization problem with ob-
jective function based on KL-Divergence between vi-
sual words and color clusters.
Deformable Part Model (DPM) is used to model
objects using spring-like connections between object
parts (Felzenszwalb et al., 2010; Zhu and Ramanan,
2012). Although DPM achieves very good detec-
tion results, in particular through its ability to handle
13
Braunstain E. and Gath I..
A New Robust Color Descriptor for Face Detection.
DOI: 10.5220/0005177400130021
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 13-21
ISBN: 978-989-758-077-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

challenging objects (e.g. deformations, view changes
and partially occluded objects), the general compu-
tational complexity of part-based methods is higher
than global feature-based methods (Bergtholdt et al.,
2010; Heisele et al., 2003).
The Three-Patch Local Binary Patterns (TPLBP)
(Wolf et al., 2008) is a robust variant of the Local Bi-
nary Patterns (LBP) descriptor (Ojala et al., 2002),
based on histograms of encoded similarity measures
of local intensity patches. This descriptor was exam-
ined for the face recognition task.
In the present work the focus is not on the de-
sign of a new face detection framework, but rather on
the design of a novel color descriptor, investigating its
possible contribution to face detection. We design a
new color descriptor, based on Three-Patch LBP. Our
descriptor is computed from histograms of encoded
similarities of small local patches of chroma chan-
nels in a compact form, utilizing the inter-correlation
between image chroma channels. Consequently, the
representation of color in an image window is global,
i.e. not part-based. We examine the descriptor by
ways of its robustness to photometric and geomet-
ric variations and discriminative power. We evaluate
the contribution of the descriptor in a face detection
setting, using the FDDB dataset (Jain and Learned-
Miller, 2010), and show that it exhibits significant
contribution to detection rates.
The paper is organized as follows. In Section 2
the Three-Patch LBP (TPLBP) descriptor is described
briefly, and a multi-scale variant is proposed; in sec-
tion 3 the new color descriptor is described; in section
4 invariance and discriminative power are evaluated,
compared to the Robust Hue and Opponent Angle de-
scriptors (Weijer and Schmid, 2006); in section 5 we
evaluate the color descriptor in a face detection set-
ting, and in section 6 conclusions to this work are pro-
vided.
2 THREE-PATCH LBP
DESCRIPTOR AND A MULTI
SCALE VARIANT
The Three-Patch LBP (Wolf et al., 2008) descrip-
tor was inspired by the Self-Similarity descriptor
(Shechtman and Irani, 2007), which compares a cen-
tral intensity image patch to surrounding patches from
a predefined area, and is invariant to local appearance.
For each central pixel, a w ×w patch is considered,
centered at that pixel, and S additional patches dis-
tributed uniformly in a ring of radius r around that
pixel. Given a parameter α (where α < S), we take S
pairs of patches, α-patches apart, and compare their
values to the central patch. A single bit value for the
code of the pixel is determined according to which of
the two patches is more similar to the central patch.
The code has S bits per pixel, and is computed for
pixel p by:
T PLBP (p) =
∑
S
i=1
f
τ
(d (C
i
,C
p
) −d (C
i
0
,C
p
)) ·2
i
i
0
= (i + α) mod S
(1)
where C
i
and C
(i+α)mod S
are two w ×w patches
along the patches-ring, α-patches apart, C
p
is the cen-
tral patch, d (·, ·) is a distance measure (metric), e.g.
L
2
norm, and the function f
τ
is a step threshold func-
tion, f
τ
(x) = 1 iff x ≥ τ. The threshold value τ is
chosen slightly larger than zero, to provide stability
in uniform regions. The values in the TPLBP code
image are in the range
0, 2
S
−1
. Different code
words designate different patterns of similarity. Once
the image is TPLBP-encoded, the code image is di-
vided into non-overlapping cells, i.e. distinct regions,
and a histogram of code words with 2
S
bins is con-
structed for each cell. The histograms of all cells are
normalized to unit norm and concatenated to a single
vector, which constitutes the TPLBP descriptor.
We propose a Multi-Scale TPLBP descriptor
(termed TPLBP-MS), capturing spatial similarities
at various scales and resolutions, by concatenating
TPLBP descriptors with various parameters r and w.
The scale is affected by the radius r and patch res-
olution by patch size w. Three sets of parameters
are used for the encoding operator of Eq. (1), i.e.
(r, S, w) =
{
(2, 8, 3), (3,8, 4), (5, 8, 5)
}
, all with S = 8
and α = 2, as in (Wolf et al., 2008). These 3 TPLBP
descriptors are concatenated to produce the TPLBP-
MS descriptor. Parameters r and w are changed in
similar manner in the 3 sets above, thus observing
larger scales at lower resolutions.
3 A NEW COLOR DESCRIPTOR -
COUPLED-CHROMA TPLBP
Many color descriptors are histograms of color values
in some color space, e.g. rg-histogram and Opponent
Colors histograms (Van de Sande et al., 2010). Im-
age color channels contain texture information that is
disregarded by color histograms. Our motivation is to
formulate a color descriptor that captures the texture
information embedded in color channels in a robust
manner.
Color descriptors can be evaluated by several main
properties: (1) Invariance to photometric changes
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
14

(e.g. illumination, shadows etc.); (2) Invariance to ge-
ometric changes (e.g. camera viewpoint, object pose,
scale etc.); (3) Discriminative power, i.e. the ability to
distinguish a target object from the rest of the world;
(4) Stability, in a sense that the variance of a certain
dissimilarity measure between descriptor vectors of
samples from a specific distribution (or class) is low.
We would like to formulate a color descriptor that ad-
heres to these properties.
We represent color in CIE-Lab space, due to its
perceptual uniformity to a human observer. Using
Euclidean distance in CIE-Lab space approximates
the perceived distance by an observer, hence a detec-
tor based on this color space can in some sense ap-
proximate the perception of human color vision. In
CIE-Lab space, L is the luminance, a and b are the
chroma channels. We consider first a color descriptor
produced by applying TPLBP to both chroma chan-
nels and concatenating the single-channel descriptors
to a single descriptor. Images in JPEG format are ana-
lyzed, in which the chroma channels are sub-sampled
(Guo and Meng, 2006), thus spatial resolution in
chroma channels is lower than in intensity. Hence,
to extract meaningful features from chroma, the ap-
propriate operator should be applied at a coarse res-
olution, relative to the operator applied to the inten-
sity image. The values of the parameters are chosen
accordingly, (r, S, w) = (5, 8, 4), i.e. both the radius
and patch dimension are increased. This descriptor is
termed Chroma TPLBP (C-TPLBP). It has twice the
size of TPLBP.
A degree of correlation exists between the chroma
channels in CIE-Lab space. This can be observed
either from the derived equations of CIE-Lab color
space from CIE-XYZ space, or from an experimental
perspective, by constructing a 2-D chroma histogram
of face images. Elliptically cropped face images from
the FDDB dataset (Jain and Learned-Miller, 2010)
with 2500 images are used to fit a 2-D Gaussian den-
sity of chroma values a and b by mean and covari-
ance of the data. From the covariance matrix, we
have that σ
ab
= 53.7, i.e. nonzero correlation be-
tween the chroma channels. We presume that cou-
pling the chroma channels information may lead to a
robust descriptor, which is also more compact than C-
TPLBP, where chroma channels descriptions are com-
puted separately. We propose the following operator:
CC −T PLBP (p) =
∑
S
i=1
f
τ
∑
k=a,b
d
C
k,i
,C
k,p
−d
C
k,i
0
,C
k,p
·2
i
i
0
= (i + α) mod S
(2)
where C
k,i
is the ith patch of chroma channel k
and the inner summation is over chroma channels,
a and b. The thresholding function f
τ
operates on
the sum of differences of patches distance functions,
for both chroma channels. Given a parameter α, we
take S pairs of patches from each chroma channel,
α-patches apart, and for each pair we compare dis-
tances to the central patch of the appropriate chan-
nel. A single bit value for the code of a pixel is de-
termined as follows - if similarities in both chroma
channels correlate, e.g. if in both chroma channels
patch C
i
is more similar to the central patch C
p
than
patch C
i+α
, then the appropriate bit will be assigned
value 0 (value 1 in the opposite case). Conversely,
if dissimilarities of the two channels do not corre-
late, then by viewing the argument of the function f
τ
as
∑
k=a,b
d
C
k,i
,C
k,p
−
∑
k=a,b
d
C
k,(i+α)mod S
,C
k,p
,
the patch with lower sum of distances in both chroma
channels is more similar to the center, and the code
bit is derived accordingly. The computed code has S
bits per pixel, and this descriptor is of the same size as
TPLBP, i.e. half the size of C-TPLBP. This descrip-
tor is termed Coupled-Chroma TPLBP (CC-TPLBP).
The parameters are chosen in accordance with those
of C-TPLBP, (r, S, w) = (5,8, 4) and α = 2. We em-
phasize that different values for the radius (r), num-
ber of patches (S), patch dimension (w) and α may
be chosen, however, preliminary experiments showed
that good discriminative ability was obtained with the
parameter values specified above. The histograms are
computed on small cells of (20, 20) pixels, thus main-
taining the spatial binding of color and shape infor-
mation in the image by cells delimitation, i.e. late
fusion of color and shape (Snoek, 2005; Khan et al.,
2012a). CC-TPLBP is invariant to monotonic varia-
tions of chroma and luminance. Such variations do
not cause any change to the resulting descriptor. In
Fig. 1 we present the CC-TPLBP operator, where the
index k =
{
a, b
}
designates the chroma channel, as
in Eq. (2), with an example code computation for a
color face image. CC-TPLBP can be combined with
intensity-based shape features for classification tasks.
4 EVALUATION OF COLOR
DESCRIPTORS
CC-TPLBP is invariant to monotonic changes of both
luminance and color channels. Moreover, we expect
it to exhibit a high degree of robustness to geomet-
rical changes, e.g. pose, local appearance and cam-
era viewpoint, as it is computed by similarities of
radially-distributed image patches. We evaluate CC-
TPLBP with respect to properties (1) - (4) described
in section 3, compared to the Robust Hue and Op-
ponent Angle (OPP) color descriptors (Weijer and
ANewRobustColorDescriptorforFaceDetection
15
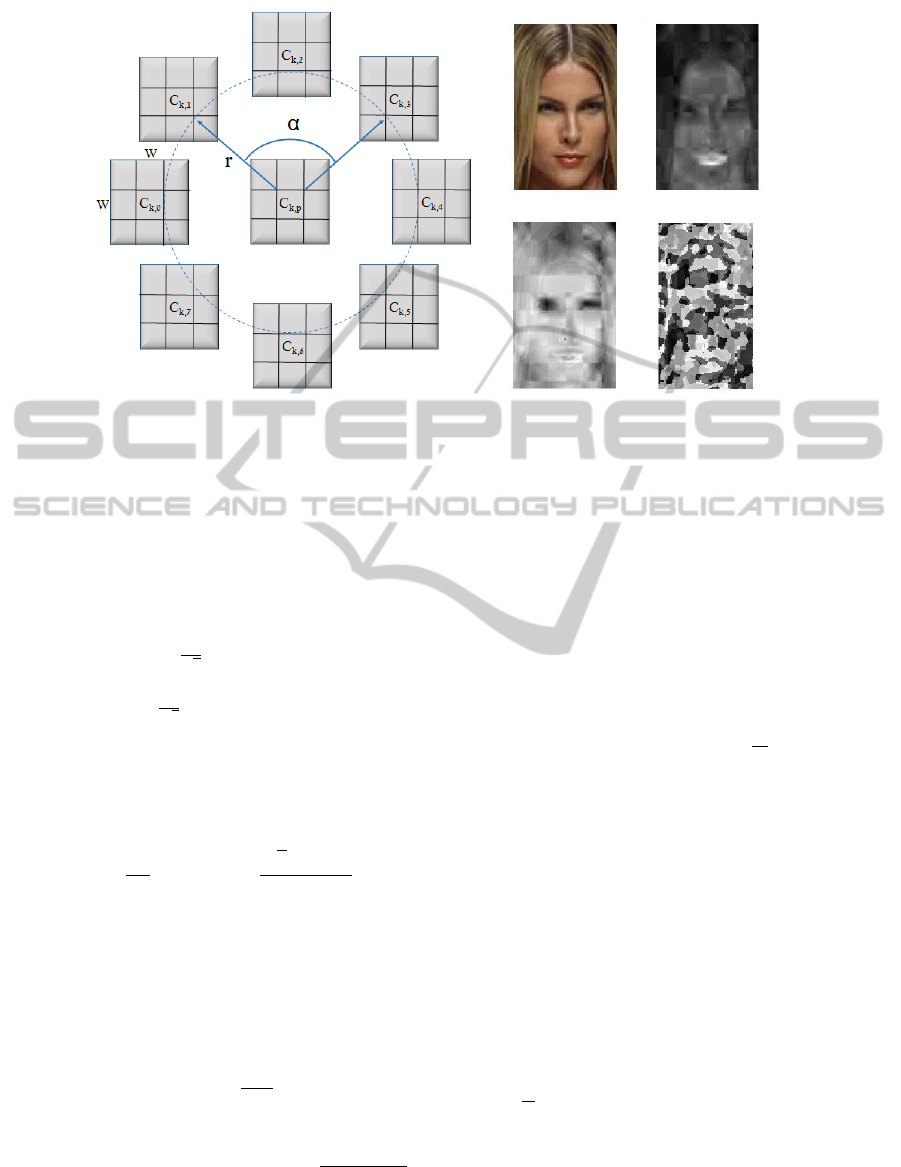
(a) (b)
Figure 1: CC-TPLBP code computation. (a) CC-TPLBP operator for a single chroma channel, with parameters α = 2, S=8
and w=3. (b) An example of CC-TPLBP code for a color face image. Upper left - face image; upper right - CIE-Lab a
chroma; lower left - CIE-Lab b chroma (a and b are presented as gray-level images); lower right - CC-TPLBP code image.
The parameters used are r=5, S=8, w=4
Schmid, 2006). Opponent Colors are invariant with
respect to lighting geometry variations, and are com-
puted from RGB by:
O1 =
1
√
2
(R −G)
O2 =
1
√
6
(R + G −2B)
(3)
The Robust Hue descriptor is computed as histograms
on image patches over hue, which is computed from
the corresponding RGB values of each pixel, accord-
ing to:
hue = arctan
O1
O2
= arctan
√
3(R −G)
R + G −2B
!
(4)
Hue is invariant with respect to lighting geometry
variations when assuming white illumination. Hue
is weighted by the saturation, to reduce error. The
Opponent Derivative Angle descriptor (OPP) is com-
puted on image patches, by the histogram over the
opponent angle:
ang
O
x
= arctan
O1
x
O2
x
(5)
where O1
x
and O2
x
are spatial derivatives of the
chromatic opponent channels. OPP is weighted by the
chromatic derivative strength, i.e. by
p
O1
2
x
+ O2
2
x
,
and is invariant with respect to diffuse lighting and
spatial sharpness. Color histograms are generally
considered more invariant to pose and viewpoint
changes than shape descriptors (Diplaros et al.,
2006), but are sensitive to changes of illumination
and shading.
We evaluate invariance and discriminative
power by the Kullback-Leibler Divergence, a
non-symmetric dissimilarity measure between two
probability distributions, p and q, expressed as:
D
KL
p
q
=
∑
i
p
i
log
p
i
q
i
(6)
where q is considered a model distribution.
We consider descriptors that are constructed from
M histograms of M distinct image cells. Referring
to CC-TPLBP, each histogram has 2
S
bins, produc-
ing a descriptor of size M × 2
S
. Given two im-
ages, each with M cells, we compute M histograms
for each image. To compare CC-TPLBP descrip-
tors of these two images, we compute the KL Diver-
gence for each pair of appropriate histograms from
both images, i.e.
{
D
KL
(h
1,m
, h
2,m
)
}
m=1,..,M
, where
{
h
i,m
}
m=1,..,M
i=1,2
is the mth histogram of image i. We
define the KL Divergence of image 1 with respect
to image 2 by averaging over all image cells, i.e.
D
1,2
KL
=
1
M
∑
M
m=1
(D
KL
(h
1,m
, h
2,m
)). Each single-cell
histogram contains 2
8
= 256 bins.
We evaluate the CC-TPLBP, Hue and OPP de-
scriptors by three experiments, described as follows:
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
16
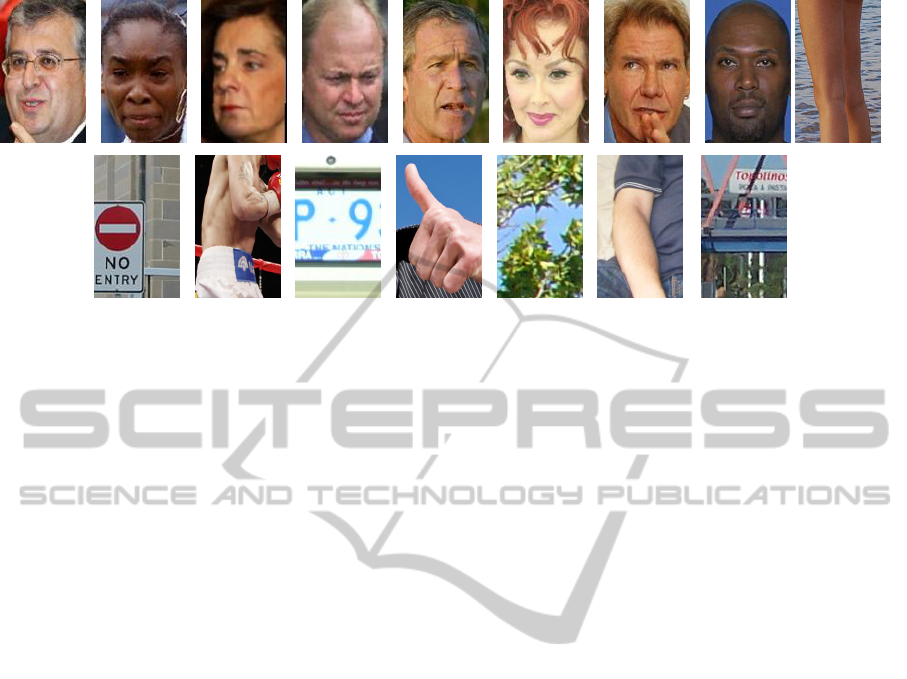
Figure 2: Example of face and background images used to examine discriminative power. Top line - sample face images,
bottom line - sample background images.
4.1 Invariance to Photometric and
Geometric Variations
In the first experiment we evaluate invariance to com-
bined photometric and geometric variations, i.e. illu-
mination and background, face pose and viewpoint.
While this does not allow for independent evaluations
of invariance to photometric and geometric variations,
it simulates a realistic setting for face detection. We
use several groups of images of single persons from
the LFW Face Recognition dataset (Huang et al.,
2007), each group displays a single person with the
above variations. We compute the CC-TPLBP, Hue
and OPP histograms for all images in a set, normal-
ized to unit sum, and the KL Divergence between his-
tograms of all image pairs (which is non-symmetric,
i.e. D
KL
(p
i
, p
j
) 6= D
KL
(p
j
, p
i
)). Table 1 contains
statistics of KL Divergence values of all descriptors
for several image sets. While the number of images
is relatively small, the number of resulting pairing is
large and therefore indicative. CC-TPLBP appears to
be most robust to these variations, as its mean KL Di-
vergence is by far the lowest from all descriptors on
all image sets. CC-TPLBP also exhibits a higher de-
gree of stability than other descriptors, by its lowest
variance.
4.2 Invariance to Gaussian Noise
In the second experiment, we test the effects of
added noise, using 2500 face images from the
FDDB dataset (Jain and Learned-Miller, 2010), nor-
malized to size 63 × 39 pixels. According to
(Diplaros et al., 2006), sensor noise is normally dis-
tributed, as additive Gaussian noise is widely used
to model thermal noise, and is a limiting behav-
ior of photon counting noise. High Gaussian noise
is added to R, G and B channels of all images,
i.e.
{
R, G, B
}
D
=
R + n
R
xy
, G +n
G
xy
, B +n
B
xy
, where
n
k
xy
= n
k
(x, y)
k=R,G,B
, n (x, y) ∼ N (0, σ
n
), with
σ
n
= 5. We calculate KL Divergence between de-
scriptor histograms of original and corrupted images.
Statistics of the KL Divergence values are displayed
in Table 2. While Hue has an average KL Divergence
slightly lower than CC-TPLBP, the latter has signifi-
cantly lower variance than other descriptors, indicat-
ing higher stability under addition of Gaussian noise.
4.3 Discriminative Power
In the third experiment, we examine discriminative
power. A descriptor based on color histograms would
be effective in distinguishing face patches from dis-
tinct objects, e.g. trees or sky patches, but may be
less effective in distinguishing a face from skin, e.g.
neck, torso. Here a color texture descriptor may be
more efficient. We choose randomly 200 face images
from the FDDB dataset, and pick 200 background im-
ages (see supplementary material) that give a degree
of diversity and challenge for the considered descrip-
tors, i.e. versatility of chroma and texture. Half of the
background images do not contain skin at all, and the
other half partially contain skin, with variable back-
grounds. This image set is constructed to represent
the kind of natural setting where the function of the
descriptor is to be able to discriminate face patches
from non-face skin patches together with versatile
non-skin background. Several examples are presented
in Fig. 2.
To evaluate discriminative power, we use the KL
Divergence similar to (Khan et al., 2012a). We define
a KL-ratio for face sample, considering all face and
background samples in the set:
ANewRobustColorDescriptorforFaceDetection
17

Table 1: Statistics of KL-Divergence, combined evaluation of photometric and geometric invariance, for several sets of single-
person images. KL-Divergence is calculated for all pairs of images in a set. For further explanation, see text.
Person set (No. images / No. pairs) Descriptor Mean Median STD
Jennifer Aniston (21 / 420)
CC-TPLBP 0.1034 0.096 0.0353
Hue 0.9666 0.8321 0.5885
OPP 0.3555 0.2637 0.288
Arnold Schwarzenegger (42 / 1722)
CC-TPLBP 0.1154 0.1 0.0519
Hue 1.3682 1.2901 0.6468
OPP 0.6535 0.482 0.551
Vladimir Putin (49 / 2352)
CC-TPLBP 0.1124 0.0988 0.0515
Hue 1.1799 1.0515 0.6268
OPP 0.467 0.3582 0.3737
Table 2: Statistics of KL-Divergence, noisy images.
Desc. Mean Median STD
CC-TPLBP 0.0553 0.0543 0.0168
Hue 0.0492 0.0397 0.0405
OPP 0.0968 0.0818 0.0579
Table 3: Statistics of KL-ratios; discriminative power. CC-
TPLBP is found most discriminative.
Desc. Mean Median STD
CC-TPLBP 1.7402 1.7506 0.1678
Hue 1.456 1.3835 0.361
OPP 1.6671 1.6712 0.2185
KL −ratio
k
=
1
N
B
∑
j∈B
KL (p
j
, p
k
)
1
N
F
−1
∑
i∈F, i6=k
KL (p
i
, p
k
)
∀k ∈F
(7)
where p
k
is the descriptor of face patch k ∈ F, p
j
is the descriptor of background patch j ∈ B, N
F
and
N
B
are the number of face and background samples,
respectively. For a face sample k, Eq. (7) defines the
ratio of the average KL Divergence with all non-face
patches, divided by the average KL Divergence with
all face patches. The higher this ratio for a face patch
k ∈ F , the more discriminative the descriptor with re-
spect to this face and data set, as the intra-class KL
Divergence is lower than the inter-class KL Diver-
gence. The KL-ratio values of all descriptors on the
dataset are displayed in Fig. 3, after low-pass filter-
ing by a uniform averaging filter of size 7. Smoothing
is performed in order to reduce the noisiness in the
original KL-ratio curves. Statistics of the KL-ratios
(prior to low-pass filtering) are given in Table 3. We
observe that the average KL-ratio for CC-TPLBP is
higher than that of Hue and OPP (i.e. higher discrim-
inative power), and that the variance of CC-TPLBP is
the lowest, indicating high stability (i.e. low variabil-
ity of KL-ratios for data samples from a specific class
in a dataset).
5 EVALUATION OF THE COLOR
DESCRIPTOR IN A FACE
DETECTION SETTING
We evaluate the CC-TPLBP color descriptor in a face
detection setting.
5.1 Dataset
We use the FDDB benchmark (Jain and Learned-
Miller, 2010), which contains annotations of 5171
faces in 2845 images, divided into 10 folds. five
folds are used for training, and five for testing. Train-
ing face images are normalized to size 63 ×39. The
background set is constructed from random 63 ×39 -
sized patches from background images of the NICTA
dataset (Overett et al., 2008), i.e. of same size as the
face patches.
5.2 Evaluation Protocol
In our face detection system, we use Support Vector
Machines (Cortes and Vapnik, 1995), a classification
method that has been successfully applied for face de-
tection (Romdhani et al., 2004; Osuna et al., 1997),
as the face classifier. We examine various descrip-
tors combinations, i.e. (1) TPLBP, (2) TPLBP-MS,
(3) TPLBP-MS + Hue, (4) TPLBP-MS + OPP, (5)
TPLBP-MS + C-TPLBP and (6) TPLBP-MS + CC-
TPLBP. For each of (1)-(6) we train a linear-kernel
SVM classifier with Soft Margin, where the regular-
ization parameter C is determined by K-fold cross-
validation (K=5). To reduce false alarm rate, we add
a confidence measure for an SVM classifier decision,
as a probability for a single decision (Platt, 1999):
p(w, x, y) =
1
1 + exp (−y(w ·x + b))
(8)
where w is the SVM separating hyperplane nor-
mal vector, x is a test sample and y is the classifi-
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
18

Figure 3: Discriminative power measure. KL-ratios of 200 face images with 200 background images. Horizontal axis: face
sample numbers; vertical axis: KL-ratio values computed by Eq. (7). The displayed KL-ratios are smoothed using a uniform
averaging filter of size 7, for further explanation see text. It can be seen that CC-TPLBP (blue curve) has the highest mean
KL-ratio and lowest variance, as also seen in Table 3.
cation label. This logistic (sigmoid) function assigns
high confidence (i.e. close to 1) to correctly-classified
samples which are distant from the hyperplane.
Preprocessing of an image is performed by ap-
plying skin detection in CIE-Lab color space, to re-
duce image area to be scanned by a sliding window
method. Various skin detection methods and color
spaces can be used (hsuan Yang and Ahuja, 1999;
Jones and Rehg, 2002; Zarit et al., 1999; Terrillon
et al., 2000; Braunstain and Gath, 2013). We train
offline a skin histogram based on chroma (a, b), omit-
ting the luminance L as it is highly dependent on
lighting conditions (Cai and Goshtasby, 1999). Skin
detection in a test image is performed pixel-wise, by
the application of threshold τ
s
, i.e. for pixel p =
(x
p
, y
p
) with quantized chroma values
¯a
p
,
¯
b
p
and
histogram value h
¯a
p
,
¯
b
p
= h
p
, the pixel is classi-
fied as skin if h
p
> τ
s
. After skin is extracted, we
perform a sliding window scan to examine windows
at various positions and scales. The confidence mea-
sure of Eq. (8) is used by applying a threshold, i.e. if
p(w, x, y) > p
th
, the window is classified as a face.
5.3 Results
Face detection performance was evaluated by fol-
lowing the evaluation scheme proposed in (Jain and
Learned-Miller, 2010). Receiver Operating Charac-
teristic (ROC) were computed, with True Positive rate
(T PR ∈ [0, 1]) vs. number of False Positives (FP). In
Fig. 4, ROC curves of continuous score (Jain and
Learned-Miller, 2010) are depicted for various de-
scriptor combinations. We observe that each of the
descriptor combinations, TPLBP-MS, C-TPLBP and
CC-TPLBP produce significant improvements in de-
tection rates, compared to TPLBP. CC-TPLBP leads
to similar performance as C-TPLBP, but with a more
compact representation.
6 CONCLUSIONS
In the present work the focus is not on the design or
optimization of a face detection framework, but rather
on color representation, or description, for the task of
face detection. We proposed a novel color descriptor,
CC-TPLBP, which captured the texture information
embedded in color channels. CC-TPLBP is by defini-
tion invariant to monotonic changes in chroma and lu-
minance channels. A multi-scale variant of TPLBP is
designed, termed TPLBP-MS. All experiments were
performed in a face detection setting. We examined
the invariance of CC-TPLBP, jointly for photomet-
ric and geometric variations, i.e. illumination, back-
ANewRobustColorDescriptorforFaceDetection
19

Figure 4: Face detection ROC curves on FDDB, for various descriptors combinations. It is clearly discerned that both
CC-TPLBP and C-TPLBP (red and green lines, respectively) outperform all the other descriptor combinations. In addition,
CC-TPLBP is twice more compact than C-TPLBP, making it the more efficient representation.
ground, face pose and viewpoint changes, and sepa-
rately for addition of Gaussian noise, and compared to
the Robust Hue and Opponent Angle (OPP) descrip-
tors. Discriminative power was evaluated with re-
spect to the above mentioned descriptors. CC-TPLBP
is superior to the other two descriptors. It achieves
higher discriminative power and much higher invari-
ance to combined photometric and geometric varia-
tions, compared to Hue and OPP, as demonstrated in
section 4. The evaluation experiments in a face de-
tection setting demonstrated that (1) TPLBP-MS im-
proves detection rates compared to TPLBP, (2) the ad-
dition of CC-TPLBP produces a sharp improvement
over TPLBP-MS and (3) CC-TPLBP leads to supe-
rior detection rates compared to Hue and OPP.
The CC-TPLBP color-based descriptor can be in-
tegrated into face detection frameworks to achieve a
substantial improvement in performance using exis-
tent color channels information. It can also be used in
general color-based object recognition tasks.
REFERENCES
Bergtholdt, M., Kappes, J., Schmidt, S., and Schn
¨
orr, C.
(2010). A study of parts-based object class detection
using complete graphs. Int. J. Comput. Vision, 87(1-
2):93–117.
Bindemann, M. and Burton, A. M. (2009). The role of
color in human face detection. Cognitive Science,
33(6):1144–1156.
Braunstain, E. and Gath, I. (2013). Combined supervised /
unsupervised algorithm for skin detection: A prelimi-
nary phase for face detection. In Image Analysis and
Processing - ICIAP 2013 - 17th International Confer-
ence, Naples, Italy, September 9-13, 2013. Proceed-
ings, Part I, pages 351–360.
Cai, J. and Goshtasby, A. A. (1999). Detecting human faces
in color images. Image Vision Comput., 18(1):63–75.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20(3):273–297.
Diplaros, A., Gevers, T., and Patras, I. (2006). Com-
bining color and shape information for illumination-
viewpoint invariant object recognition. IEEE Trans-
actions on Image Processing, 15:1–11.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrimi-
natively trained part-based models. IEEE Trans. Pat-
tern Anal. Mach. Intell., 32:1627–1645.
Gevers, T. and Smeulders, A. (1997). Color based object
recognition. Pattern Recognition, 32:453–464.
Guo, L. and Meng, Y. (2006). Psnr-based optimization of
jpeg baseline compression on color images. In ICIP,
pages 1145–1148. IEEE.
Heisele, B., Ho, P., Wu, J., and Poggio, T. (2003).
Face recognition: Component-based versus global ap-
proaches.
hsuan Yang, M. and Ahuja, N. (1999). Gaussian mixture
model for human skin color and its applications in im-
age and video databases. In Its Application in Image
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
20

and Video Databases. Proceedings of SPIE 99 (San
Jose CA, pages 458–466.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst.
Jain, A. K. (1989). Fundamentals of Digital Image Pro-
cessing. Prentice-Hall, Inc., Upper Saddle River, NJ,
USA.
Jain, V. and Learned-Miller, E. (2010). Fddb: A benchmark
for face detection in unconstrained settings. Tech-
nical Report UM-CS-2010-009, University of Mas-
sachusetts, Amherst.
Jones, M. J. and Rehg, J. M. (2002). Statistical color mod-
els with application to skin detection. Int. J. Comput.
Vision, 46(1):81–96.
Khan, F. S., Anwer, R. M., van de Weijer, J., Bagdanov,
A. D., Vanrell, M., and Lopez, A. M. (2012a). Color
attributes for object detection. In CVPR, pages 3306–
3313. IEEE.
Khan, F. S., van de Weijer, J., and Vanrell, M. (2012b).
Modulating shape features by color attention for ob-
ject recognition. International Journal of Computer
Vision, 98(1):49–64.
Khan, R., van de Weijer, J., Khan, F. S., Muselet, D., Ducot-
tet, C., and Barat, C. (2013). Discriminative color de-
scriptors. In CVPR, pages 2866–2873. IEEE.
Li, H., Hua, G., Lin, Z., Brandt, J., and Yang, J. (2013).
Probabilistic elastic part model for unsupervised face
detector adaptation. In The IEEE International Con-
ference on Computer Vision (ICCV).
Mikolajczyk, K., Schmid, C., and Zisserman, A. (2004).
Human detection based on a probabilistic assembly
of robust part detectors. In ECCV (1), volume 3021
of Lecture Notes in Computer Science, pages 69–82.
Springer.
Ojala, T., Pietik
¨
ainen, M., and M
¨
aenp
¨
a
¨
a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
Pattern Anal. Mach. Intell., 24(7):971–987.
Osuna, E., Freund, R., and Girosi, F. (1997). Training sup-
port vector machines: an application to face detection.
pages 130–136.
Overett, G., Petersson, L., Brewer, N., Pettersson, N., and
Andersson, L. (2008). A new pedestrian dataset for
supervised learning. In IEEE Intelligent Vehivles Sym-
posium, Eindhoven, The Netherlands.
Platt, J. C. (1999). Probabilistic outputs for support vector
machines and comparisons to regularized likelihood
methods. In ADVANCES IN LARGE MARGIN CLAS-
SIFIERS, pages 61–74. MIT Press.
Romdhani, S., Torr, P., and Sch
¨
olkopf, B. (2004). Efficient
face detection by a cascaded support-vector machine
expansion. Royal Society of London Proceedings Se-
ries A, 460:3283–3297.
Shechtman, E. and Irani, M. (2007). Matching local self-
similarities across images and videos. In IEEE Con-
ference on Computer Vision and Pattern Recognition
2007 (CVPR’07).
Snoek, C. G. M. (2005). Early versus late fusion in semantic
video analysis. In In ACM Multimedia, pages 399–
402.
Terrillon, J.-C., Fukamachi, H., Akamatsu, S., and Shirazi,
M. N. (2000). Comparative performance of different
skin chrominance models and chrominance spaces for
the automatic detection of human faces in color im-
ages. In FG, pages 54–63.
Van de Sande, K. E. A., Gevers, T., and Snoek, C. G. M.
(2010). Evaluating color descriptors for object and
scene recognition. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 32(9):1582–1596.
Viola, P. and Jones, M. (2004). Robust real-time face de-
tection. International Journal of Computer Vision,
57:137–154.
Wei, Y., Sun, J., Tang, X., and Shum, H.-Y. (2007). Interac-
tive offline tracking for color objects. In ICCV, pages
1–8.
Weijer, J. V. D. and Schmid, C. (2006). Coloring local fea-
ture extraction. In In ECCV, 2006. MENSINK et al.:
TMRF FOR IMAGE AUTOANNOTATION.
Wolf, L., Hassner, T., and Taigman, Y. (2008). Descriptor
based methods in the wild. In Real-Life Images work-
shop at the European Conference on Computer Vision
(ECCV).
Zarit, B. D., Super, B. J., and Quek, F. K. H. (1999). Com-
parison of five color models in skin pixel classifica-
tion. In In ICCV99 Intl. Workshop on, pages 58–63.
Zhang, L., Chu, R., Xiang, S., Liao, S., and Li, S. Z. (2007).
Face detection based on multi-block lbp representa-
tion. In Proceedings of the 2007 International Con-
ference on Advances in Biometrics, ICB’07, pages 11–
18, Berlin, Heidelberg. Springer-Verlag.
Zhu, X. and Ramanan, D. (2012). Face detection, pose es-
timation, and landmark localization in the wild. In
CVPR, pages 2879–2886.
ANewRobustColorDescriptorforFaceDetection
21
