
JChoc DisSolver
Bridging the Gap Between Simulation and Realistic Use
I. Benelallam
1,2
, Z. Erraji
1
, G. Elkhattabi
1
, J. Ait Haddou
1
and E. H. Bouyakhf
1
1
LIMIARF − FSR,University Mohammed V, Rabat, Morocco
2
INSEA, Rabat, Morocco
Keywords:
Constraint Programming (CP), Multi-Agent Systems, Distributed Problem Solving, Agent Models and
Architectures, Distributed Constraints Reasoning, Realistic Use, Constraint Satisfaction Problem (CSP),
Distributed CSP (DisCSP).
Abstract:
The development of innovative and intelligent multiagent applications based on Distributed Constraints Rea-
soning techniques is obviously a fastidious task, especially to tackle new combinatorial problems (e.i. dis-
tributed resource management, distributed air traffic management, Distributed Sensor Network (B
´
ejar et al.,
2005)). However, there are very few open-source platforms dedicated to solve such problems within realistic
uses. Given the difficulty that researchers are facing, simplifying assumptions and simulations uses are com-
monly used techniques. Nevertheless, these techniques may not be able to capture all the details about the
problem to be solved. Hence, transition from the simulation to the actual development context causes a loss
of accuracy and robustness of the applications to be implemented.
In this paper, we present preliminary results of a new distributed constraints programming platform, namely
JChoc DisSolver. Thanks to the extensibility of JADE communication model and the robustness of Choco
Solver, JChoc brings a new added value to Distributed Constraints Reasoning. The platform is user-friendly
and the development of multiagent applications based on Constraints Programming is no longer a mystery to
users.
A real distributed problem is used to illustrate how the platform can be appropriated by an unsophisticated
user and the experimental results are encouraging for more investigations.
1 INTRODUCTION
Since the onset of real time electronic devices, mo-
bile, ubiquitous, and intelligent computing, new com-
binatorial problems have emerged in the AI commu-
nity such as: distributed resource management, dis-
tributed air traffic management, Distributed Sensor
Network (B
´
ejar et al., 2005), disaster rescue (Ki-
tano et al., 1999) and distributed Meeting Schedul-
ing Problems (SMP), for which it is not suitable to
collect all data of problem in one site, to solve it
by a centralized algorithm. The reasons are com-
munication time and cost of translation of each sub-
problem in a common format. In addition, to give
a single agent all data of the problem can also be
excluded for reasons of security and confidentiality.
Therefore, some of the AI communities are motivated
to take an interest in Distributed Constraint Reason-
ing (DCR), giving birth to other distributed formal-
ism (Yokoo, 2001), whose work focused on develop-
ing techniques for modeling and solving distributed
combinatorial problems with or without optimization
criterion. Distributed Constraint Satisfaction Prob-
lems (DisCSP) and Distributed Constraint Optimiza-
tion Problems (DCOP) provide a useful framework
of multiagent systems for distributed resolution of
combinatorial problems (Yokoo and Hirayama, 1995;
Yokoo et al., 1992; Yokoo, 2001; Yokoo, 2000; Yokoo
et al., 1998).
In this context, an agent must have a commu-
nication platform that allows the exchange of in-
formation or dialogue to coordinate their decision-
making. This reliable communication tool allows
agents to send and receive messages according to a
given distributed protocol. However, various sophisti-
cated solvers have been developed: DisChoco (Wahbi
et al., 2011), Disolver (Hamadi, 2003), MELY (Gal-
ley, 2000), Frodo (Petcu, 2006). These solvers rely
on several algorithms for solving DisCSP problems
such as Asynchronous Backtracking (ABT (Yokoo
66
Benelallam I., Erraji Z., Elkhattabi G., Ait Haddou J. and Bouyakhf E..
JChoc DisSolver - Bridging the Gap Between Simulation and Realistic Use.
DOI: 10.5220/0005208600660074
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 66-74
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

et al., 1992), ABT Family (Bessiere et al., 2005)),
Asynchronous Forward Checking (AFC) (Meisels
and Zivan, 2007) and Nogood-based Asynchronous
Forward-Checking (AFC-ng) (Ezzahir et al., 2009).
Asynchronous Distributed constraints OPTimization
(Adopt) (Modi et al., 2005), Asynchronous Forward
Bounding (AFB) (Gershman et al., 2009), Asyn-
chronous Branch-and-Bound (Adopt-BnB) (Yeoh
et al., 2008) and Dynamic Backtracking for dis-
tributed constraint optimization (DyBop) (Ezzahir
et al., 2008) were developed to solve DCOP prob-
lems. As well as the authors recognise that most
of these tools are specially developed for simulation
context. This fact can be clearly observed from its
experimental setups. Given the difficulty that re-
searchers are facing, they often make many simpli-
fying assumptions (i.e. simple agent (one variable
per agent), agents as multi-thread, single physical
platform, communication via simulated perfect FIFO
channels, etc...) about the underlying distributed
problem, which might affect the predictions obtained
from the simulation in non-trivial ways. Switching
from the simulation to the actual development prac-
tice often leads to loss of accuracy. Hence, bridging
the gap between simulation and actual development
and deployment within distributed constraints solvers
is the primary motivation for presenting the different
ideas discussed in the present paper.
In this paper we focus on the development of a
multiagent platform for Distributed Constraint Rea-
soning, namely JChoc DisSolver. This proposed plat-
form allows non-expert user to address and solve eas-
ily real Distributed Constraint Satisfaction Problems.
This document is organized as follows. Section
2 presents a brief definition of Distributed Constraint
Satisfaction Problem (DisCSP) and gives an exam-
ple. In section 3, we present related work . Section
4 presents the global architecture of JChoc platform.
In section 5, we show how use this platform in a dis-
tributed environment. And finally, in section 6 we
conclude the paper by experiment this platform within
a real Distributed Constraints Satisfaction Problem.
2 PRELIMINARIES
2.1 Distributed Constraint Satisfaction
Problems
Constraint Programming distinguishes between the
description of the constraints involved in a problem
on the one hand, and the algorithms and heuristics
used to solve the problem on the other hand. Mod-
eling and solving problems is through a very elegant
mathematical formalism, called the Constraint Satis-
faction Problems CSPs.
The Distributed Constraint Satisfaction Problem
(DisCSP) is represented by a constraint network
where variables and constraints are distributed among
multiple automated agents.
Definition. A finite DisCSP is defined by a 5-
tuple(A, X, D,C, ψ), where:
• A = {A
1
, ..., A
p
} is a set of p agents.
• X = {x
1
, ..., x
n
} is a set of n variables such that
each variable x
i
is controlled by one agent in A.
• D = {D(x
1
), ..., D(x
2
)} is a set of current do-
mains, where D(x
i
) is a finite set of possible
values for variable x
i
.
• C = {c
1
, ..., c
m
} is a set of m constraints that
specify the combinations of values allowed for
the variables they involve. We note that the
constraints are distributed among the automated
agents. Hence, constraints divide into two broad
classes: inter-agent and intra-agent.
• ψ : X 7−→ A is a function that maps each variable
to its agent.
A solution to a DisCSP is an assignment of a value
from its domain to every variable of the distributed
constraint network, in such a way that every constraint
is satisfied. Solutions to DisCSPs can be found by
searching through the possible assignments of values
to variables such as ABT algorithm (Yokoo et al.,
1992).
2.2 Meeting Scheduling Problem as a
DisCSP
The Distributed Meeting Scheduling Problem (MSP)
is a real distributed problem where agents may not de-
sire to deliver their personal information to a central-
ized agent to solve the whole problem (Meisels and
Lavee, 2004; Wallace and Freuder, 2002).
The MSP involves a set of n agents having a per-
sonal private calendar and a set of m meetings each
taking place in a specified location. Each agent,
A
i
∈ A, knows the set of the k
i
among m meetings
he/she must attend. It is assumed that each agent
knows the traveling time between the locations where
his/her meetings will be held. The traveling time be-
tween locations where two meetings m
i
and m
j
will
JChocDisSolver-BridgingtheGapBetweenSimulationandRealisticUse
67
be hold is denoted by TravellingTime(m
i
, m
j
). Solv-
ing the problem consists in satisfying the following
constraints: (i) all agents attending a meeting must
agree on when it will occur, (ii) an agent cannot at-
tend two meetings at same time, (iii) an agent must
have enough time to travel from the location where
he/she is to the location where the next meeting will
be held.
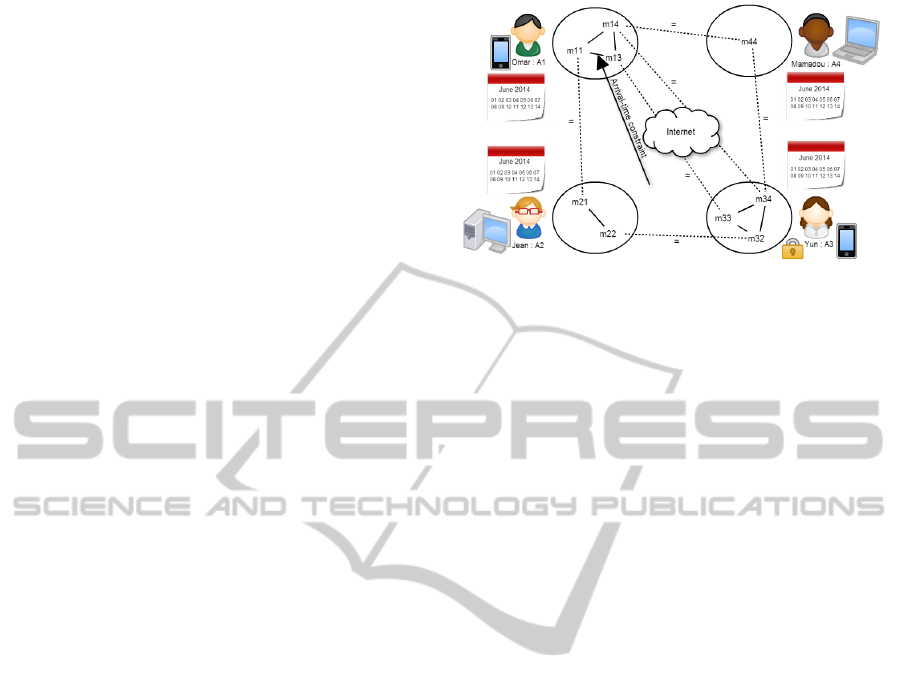
We illustrate in Figure 1 the encoding of the in-
stance of the meeting scheduling problem in the dis-
tributed constraint network formalism. This figure
shows 4 agents where each agent has a personal pri-
vate calendar and a set of meetings each taking place
in a specified location. Thus, we get the following
DisCSP:
• A = {A
1
, A
2
, A
3
, A
4
} each agent A
i
corresponds to
a real agent,
• For each agent A
i
∈ A there is a variable m
ik
, for
every meeting m
k
that A
i
attends,
• X = {m
11
, m
13
, m
14
, m
21
, m
22
, m
32
, m
33
, m
34
, m
44
}.
• D = {D(m
ik
)|m
ik
∈ X } where,
∗ D(m
11
) = D(m
13
) = D(m
14
) = {s |
s is a slot in calendar(A
1
)}.
∗ D(m
21
) = D(m
22
) = {s |
s is a slot in calendar(A
2
)}.
∗ D(m
32
) = D(m
33
) = D(m
34
) = {s |
s is a slot in calendar(A
3
)}.
∗ D(m
44
) = {s | s is a slot in calendar(A
4
)}.
• For each agent A
i
, there is a private arrival-time
constraint (c
i
kl
intra-agent constraint) between ev-
ery pair of its local variables (m
ik
, m
il
) (e.g. Omar
must attend tree meetings m
1
, m
2
and m
3
). For
each two agents A
i
, A
j
that attend the same meet-
ing m
k
there is an equality inter-agent constraint
(c
i j
k
) between the variables m
ik
and m
jk
, corre-
sponding to the meeting m
k
on agent A
i
and A
j
(e.g. Omar and Jean participate in the same meet-
ing m
1
). Then, C = {c
i
kl
, c
i j
k
}
Given this example, a Distributed Constraint Rea-
soning (DCR) platform must allow agents to have a
reliable communication tool that allows sending and
receiving messages, in order to find the feasible solu-
tions.
3 RELATED WORK
Recently, B. Lutati and al. (Lutati et al., 2014) have
proposed a MAS platform, called AgentZero. This
Figure 1: Meeting Scheduling Problem modeled as DisCSP.
tool can be considered as a new addition to the avail-
able MAS tools in general and to the DCR research
field in particular. The authors claim that AgentZero
is generic and applicable to many domains, specifi-
cally introducing benefits for the DCR simulation do-
main. However, the platform has been designed only
for simulation use and used only by researchers in
Distributed Constraint Reasoning. So developing and
setting computer software for real problems based on
DCR is not simple and remains a difficult task for
users in general.
In (Petcu, 2006) A. Petcu. Proposes a Frame-
work for Open Distributed Optimization (FRODO).
The framework is implemented in Java, and simu-
lates a multiagent environment in a single Java vir-
tual machine. Each agent in the environment is exe-
cuted asynchronously in a separate execution thread,
and communicates with its peers through message ex-
change. FRODO comes with several built in algo-
rithms and a suite of problem generators for bench-
marking.
The authors of (Sultanik et al., 2007) proposed a
open-source tool for solving DCR, called DCOPolis.
DCOPolis is an open-source framework designed to
abstract algorithm implementation from the underly-
ing platform (i.e. hardware, network, operating sys-
tem). This allows a single implementation of an al-
gorithm to be run in simulation (i.e. on top of the
NS2 network simulator with AgentJ).DCOPolis dif-
fers from existing DCR frameworks and simulators,
however, it supports a novel type of simulation in
which the runtime of any distributed algorithm can be
accurately estimated on a single physical computer.
Researchers in DCR are concerned with devel-
oping new algorithms, and comparing their perfor-
mance with existing algorithms. Therefore, in (Wahbi
et al., 2011) the authors present an open source Java
library , called DisChoco which aims at implement-
ing DCR algorithms from an abstract model of agent
. DisChoco allows to represent both DisCSPs and
DCOPs, as opposed to other platforms. A single im-
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
68

plementation of a DCR algorithm can run as simula-
tion on a single machine.DisChoco is a elegant plat-
form, but all the different issues of realistic uses and
actual deployment have not been addressed.
Developing intelligent software applications
based on DCR algorithms is a difficult task, because
the programmer must explicitly juggle between many
very different concerns, including centralized pro-
gramming, distributed programming, asynchronous
and concurrent management of distributed structures,
communication concerns and others. In addition,
there are very few open-source tools for solving DCR
problems in a physically distributed environment.
In this paper we have been looking for a singular
platform that would possess not only simulation
qualities, but especially designed for realistic and
actual deployment. JChoc platform is a new added
value which allows bridging the gap between simula-
tion and realistic use. To our knowledge, this is the
first DCR platform respecting FIPA standards and
specifications.
4 JCHOC PLATFORM
4.1 JChoc Description
The best way to prove the effectiveness of a proposed
distributed constraint reasoning algorithm, is to use
it in a realistic multi-platform agent. This is how
we can reduce the gap between theory and practice.
JChoc is a distributed constraints multiagent platform
proposed for solving combinatorial problems within a
specific distributed environment. It can also be used
to analyze and test the algorithms proposed by con-
straints programming community. This platform is
presented in the form of programming environment
(API) and applications to help different types of users.
Hence, JChoc can be easily appropriated by two main
actors:
• Developers to design and develop applications
(e.i. client application, web application, mobile
application, etc...) within distributed constraints
programming based on JChoc API;
• Non-expert user to interact directly with appli-
cations based on distributed constraints program-
ming.
This proposed platform has several advantages:
• A distributed constraints problem can be easily
addressed and solved in a realistic environment by
unsophisticated users;
• The performances of the proposed protocols (i.e.
ABT, AFC, Adopt, etc...) can be actually tested
and proved in a realistic communication channel
(i.e. WLAN WPAN WMAN WWAN);
• It offers a modular software architecture which
accepts extensions easily (i.e. security, confiden-
tiality, cryptography, etc...);
• Thanks to the extensibility of JADE communica-
tion model (JADE, 2013), JChoc allows the de-
velopment of multiagent systems and applications
consistent with Foundation for Intelligent Physi-
cal Agents (FIPA)
1
standards and specifications;
• Thanks to the the robustness of Choco plat-
form (Jussien et al., 2008), complex agent (i.e.
multiple variables per agent) can easily address
and solve its local sub-problem and use solutions
as a compiled domain.
This platform consists of several modules pre-
sented as services. The main constraint programming
services offered are based Distributed Constraint Rea-
soning Protocols (DCRP) and Choco Solver (CS).
Choco is a platform for research in centralized con-
straint programming and combinatorial optimization.
This choice of Choco enabled us to benefit from the
modules already implemented in it. In the next sec-
tion, we will study the different elements of JChoc
platform.
4.2 JChoc Architecture
JChoc architecture is motivated by FIPA specifica-
tions, it allows the development of multiagent systems
and applications conforming to MAS standards. It is
implemented in JAVA and provides classes that imple-
ment and inherit from JADE and Choco platforms to
define the behavior of specific agents. Figure 2 rep-
resents the main JChoc architectural elements. This
platform has five main modules.
• DCRP Distributed Constraint Reasoning
Protocols provides distributed constraints pro-
tocols as service. This element defines new types
of messages and implements the behavior of the
agent when receiving and sending a specific type
of information (e.i. ABT, AFC, Adopt, etc...);
• CS Choco Solver provides the ability to ad-
dress and resolve local CSP sub-problem;
• DF Director Facilitator provides a service of
”yellow pages” to the platform;
• ACC Agent Communication Channel man-
ages the communication between agents;
1
http://www.fipa.org/
JChocDisSolver-BridgingtheGapBetweenSimulationandRealisticUse
69
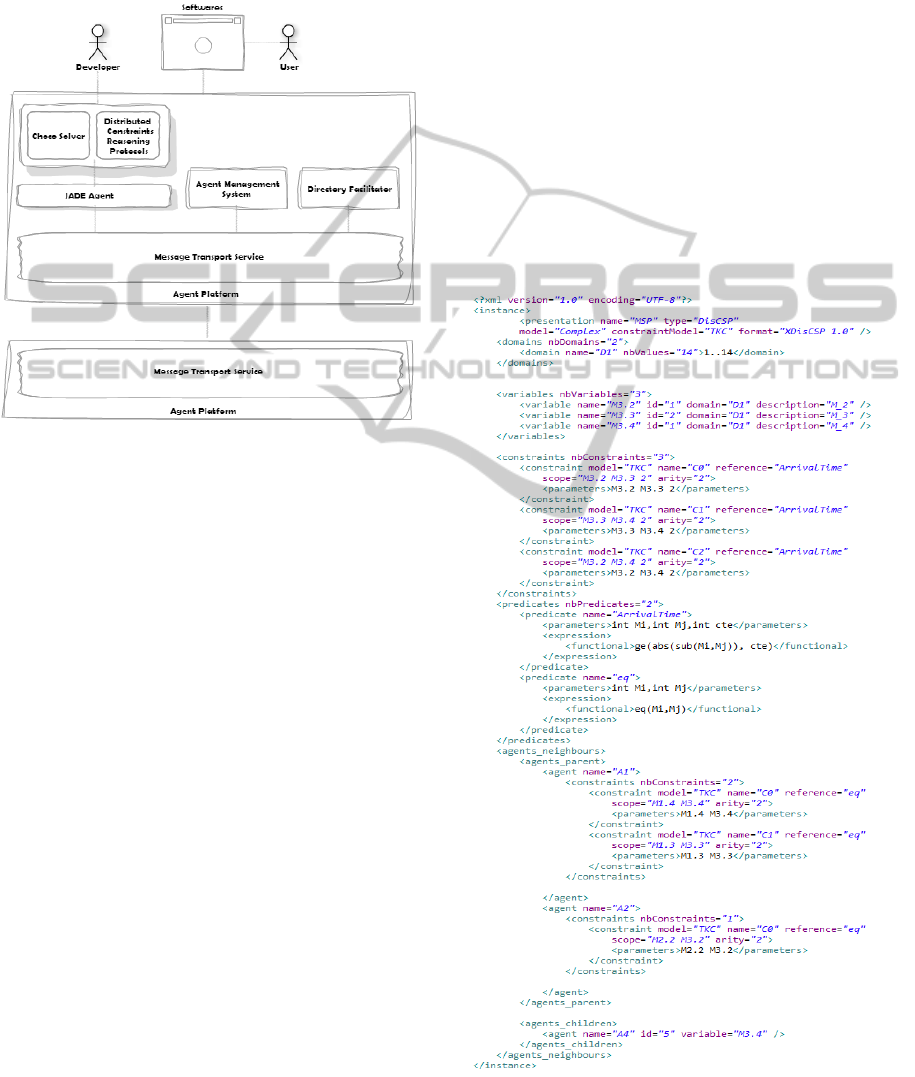
• AMS Agent Management System oversees
the registration of agents, their authentication,
their access and the use of the system.
These five modules are activated at each time the plat-
form is started.
Figure 2: The JChoc Architecture.
The JADE agent is also a key player in our plat-
form. Thanks to JADE an Agent Identifier (AID)
identifies an agent uniquely.
JChoc uses extensively a sniffing tool for debug-
ging, or simply documenting conversations between
agents. The sniffer subscribes to AMS agent to be
notified of all platform events and of all message ex-
changes between a set of specified agents. When
the user decides to monitor an agent or a group of
agents, every message directed to, or coming from,
that agent/group is tracked and displayed in the snif-
fer GUI. The user can select and view the details of
every individual message, save the message or serial-
ize an entire conversation as a binary file.
5 USING JCHOC IN
DISTRIBUTED ENVIRONMENT
In this section we present how to use the JChoc plat-
form in real distributed environment. The MSP prob-
lem depicted in figure 1 is used to illustrate this pro-
posed platform. Initially we generate a sub-problem
for each agent involved in the global DisCSP prob-
lem, modeled by an expert as an XML file, which al-
lows standardizing the syntactic structure of the sub-
problems. A sub-problem containing only the infor-
mation necessary for a single agent, so he can partici-
pate in solving the global problem in a real distributed
environment.
Figure 3 shows an example of representation of
the MSP sub-problem defined above in the XDisCSP
format. Each variable has a unique ID, which is
the concatenation of the ID of its owner agent and
index of the variable in the agent. This is neces-
sary when defining constraints (scope of constraints).
For constraints, we used two types of constraints:
TKC for Totally Known Constraint and PKC for Par-
tially Known Constraint. Constraints can be de-
fined in extension or as a Boolean function. Dif-
ferent types of constraints are predefined: equal to
eq(M
i
, M
j
), different from ne(M
i
, M
j
), greater than
or equal ge(M
i
, M
j
), greater than gt(M
i
;M
j
),etc. In
this sub-problem there is 1 complex agent A
3
which
controls exactly 3 variables. The domain of A
3
con-
Figure 3: Definition of DMS sub-problem in XDisCSP for-
mat.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
70
tain 14 values D
3
= {1...14}. There are three con-
straints of Arrival time ge(abs(sub(M
i
, M
j
)): the first
constraint is between M
3.2
and M
3.3
the second one is
between M
3.3
and M
3.4
and the third is between M
3.2
and M
3.4
, three constraints of equality eq(M
i
, M
j
): be-
tween M
1.4
and M
3.4
, between M
1.3
and M
3.3
, between
M
2.2
and M
3.2
after defining our sub-problem we can
configure our solver.
Once the sub-problem is generated, we can test the
functioning of the platform in a physically distributed
environment. So we chose machines that simulate the
different agents of the problem, and filed each sub-
problem in a machine, before launching it.
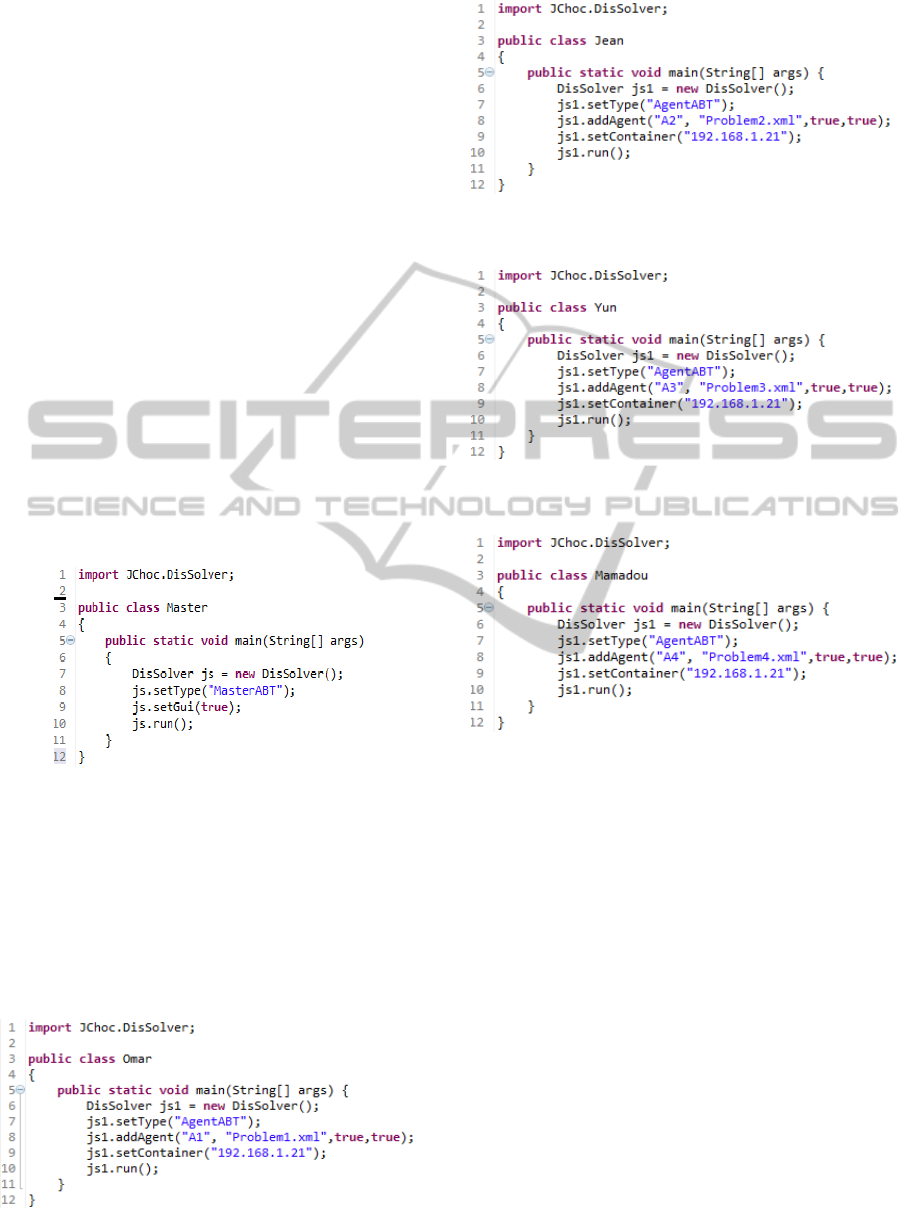
Figure 4 shows how the master launches its com-
munication interface listening on the network. We
start with instantiate the dissolver object (line 6), This
class models the distributed problem when JChoc is
used to solve a problem in a real distributed environ-
ment. All information on distributed problem is en-
capsulated in this object (identities of agents, inter-
agent constraints, protocol, etc.). Then, we define the
type of master (line 7) (ABT in this case). Finally, we
trigger the container and we launch the master (lines
8-9).
Figure 4: How the master launches its communication in-
terface.
Figures 5-8 show how to launch JChoc agents. We
start with instantiate the DisSolver object (line 6), fol-
lowed by the agent and distributed sub-problem dec-
laration which specifies the resolution algorithm to
be used (line 7-8). Next, the declaration of the con-
tainer containing the master with its IP address (line
9). Eventually, we launch the agent (line10).
Figure 5: How to implement and launch JChoc DisSolver
in Omar agent (A1).
Figure 6: How to implement and launch JChoc DisSolver
in Jean agent (A2).
Figure 7: How to implement and launch JChoc DisSolver
in Yun agent (A3).
Figure 8: How to implement and launch JChoc DisSolver
in Mamadou agent (A4).
The master waits for the confirmation of creation
of all agents before ordering the start of the search.
Thus, the problem can be solved using a specified im-
plemented protocol (ABT for example).
6 EXPERIMENTAL RESULTS
6.1 Configuration Example
To experiment the JChoc platform in a physically dis-
tributed environment, we chose five machines with
features 2.93 GHz, CORE(TM) 2 duo with 2 GB
RAM that simulate agents. These machines are con-
nected via the WLAN of our laboratory. We also
chose ABT algorithm to solve Meeting Scheduling
problems (MSP). In figure 1 above, we depict an ex-
ample of problem solved by this platform in a live
distributed environment network. This figure illus-
JChocDisSolver-BridgingtheGapBetweenSimulationandRealisticUse
71
trates an instance of MSP viewed as DisCSP where
each agent has a personal private calendar and a set
of meetings each taking place in a specified location.
In that example, there are four agents, A
1
, A
2
, A
3
and
A
4
, and four meetings, m
1
, m
2
, m
3
and m
4
. Each agent
has its own calendar divided into 14 slots. The time
required for traveling among places where meetings
can be scheduled is 2 slots.
We have intentionally limited the number of
agents to 4 for this problem needs, but the number
of the agents can be easily extended to N4 for the
neediest problems.
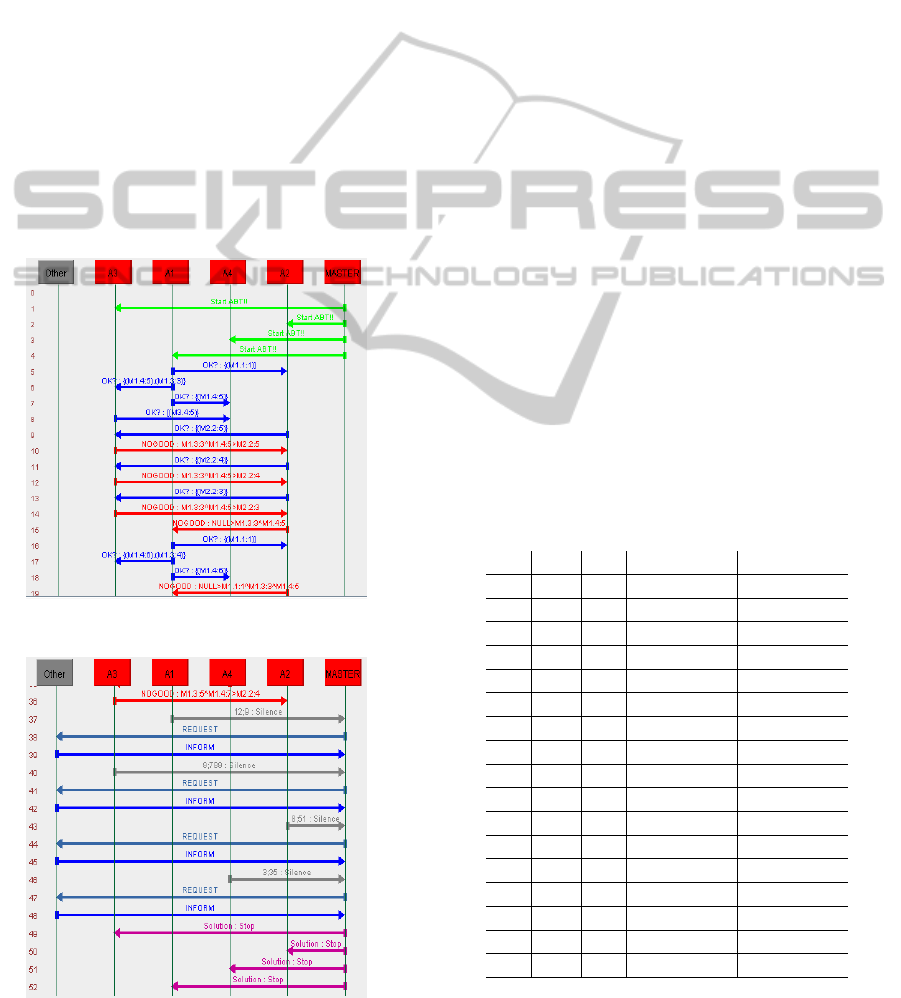
Figures 9 and 10 show the GUI of the sniffer agent
at the start and the end of ABT resolution. The canvas
provides a graphical representation of the messages
exchanged between sniffed ABTagents, where each
arrow represents a message and each color identifies
a type of conversation. For example agent A
1
sends an
OK? message to informs A
2
that he has done a new
assignment m
1.1
:1 (line 5).
Figure 9: The start on sniffer agent GUI.
Figure 10: The finish on sniffer agent GUI.
If no new consistent value is found (line 10), A
3
generates a new nogood m
1.3
:3 ∧ m
1.4
:5 ⇒ m
2.2
6= 5
by the resolution of existing nogoods. Eventually, the
system can stabilize in a state where each agent has
a value and no constraint is violated. This state is
a global solution and the network has reached quies-
cence, meaning that no message is traveling through
it (lines 37, 40, 43, 46). Once the solution is found,
the master should be advised to spread the stop order
to all agents (lines 49-52).
A solution to this example is :
A
1
−→(m
1.1
: 3; m
1.3
: 7; m
1.4
: 1), A
2
−→(m
2.1
:
3; m
2.2
: 5), A
3
−→(m
3.2
: 5; m
3.3
: 7; m
3.4
: 1),
A
4
−→(m
4.4
: 1).
6.2 Platform Scalability
The scalability of JChoc is the ability of the system,
network, and process to handle a growing amount of
work in a capable manner and its ability to be enlarged
to accommodate that growth. In order to experiment
our platform, we consider a large number of MSP in-
stances. These Meeting Scheduling Problem are char-
acterized by < m, p, n, d, h,t, a >, where m is the num-
ber of meetings, p is the number of participants, n is
the number of inter-agent constraints d determines the
number of days. Different time slots are available for
each meeting, and h is the number of hours per day,
t is a duration of the meeting and a is the percent-
age of availability for each participant. We present
our results for the class < m, p, n, 5, 10, 1, 90% > and
we vary three parameters : m, p, n (each agent has 2
meetings):
#p #m #n #messages Time (ms)
4 8 3 11 17070
5 10 5 11 17204
6 12 6 14 16144
7 14 7 14 17073
8 16 8 19 19180
9 18 9 24 20210
10 20 10 22 18294
11 22 11 32 20197
12 24 12 27 18516
13 26 15 30 20370
14 28 33 51 26073
15 30 35 105 31103
16 32 29 69 28914
17 34 33 175 38324
18 36 35 139 43172
19 38 38 141 37121
20 40 43 94 33457
Figure 11: Performance of JChoc platform using ABT pro-
tocol on the Meeting Scheduling Problem (MSP).
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
72

As shown in experimental results, in figure 7, the
performance of our platform is measured in terms of
network load (number of messages) and run-time ex-
ecution. From these preliminary results we see that
JChoc platform performs rapidly in small instances
(#p ∈ [4, 14]). The number of messages increases for
#p ∈ [15, 18] and reduces for #p > 18. This scalabil-
ity behavior is due to complexity of MSP problems.
When the instance is hard the problem can be solved
rapidly.
7 CONCLUSION
In this paper, we have proposed a modular, reli-
able, deployable and distributed software architec-
ture, called JChoc DisSolver, which can be used eas-
ily for several real combinatorial problems. The main
purpose of our platform is to break down the barriers
to building new and innovative applications. The pos-
sibility of combining the expressiveness of Choco, the
extensibility of JADE and our powerful Distributed
Constraint Reasoning Add-On bring a strong added
value in the development of innovative applications
based on Constraints Programming paradigm. The
JChoc platform presented in this paper has been de-
signed to support extensions: security, cryptography.
In this work, we have implemented ABT protocol
and solved the Meeting Scheduling problem (MSP)
in a real distributed environment. We found that by
using this platform we can adopt easily any proposed
protocol for solving distributed constraint problem in
such environment.
Future activities are focusing on enhancing the
platform by the implementation of other DCR algo-
rithms and to enrich the graphical user interface to
make it easier to use for researchers. Another direc-
tion of improvement is to allow JChoc platform to be
suitable to mobile devices. We plan also to implement
new approaches of confidentiality.
REFERENCES
B
´
ejar, R., Domshlak, C., Fern
´
andez, C., Gomes, C., Kr-
ishnamachari, B., Selman, B., and Valls, M. (2005).
Sensor networks and distributed csp: communication,
computation and complexity. In Artificial Intelligence
161:1-2, 117-148.
Bessiere, C., Brito, I., Maestre, A., and Meseguer, P. (2005).
Asynchronous backtracking without adding links: A
new member in the abt family. In Artificial Intelli-
gence,161:724.
Ezzahir, R., Bessiere, C., Benelallam, I., Bouyakhf, E., and
Belaissaoui, M. (2008). Dynamic backtracking for
distributed constraint optimization. In Proceeding of
the 2008 conference on ECAI 2008, 901-902. Amster-
dam, The Netherlands, The Netherlands, IOS Press.
Ezzahir, R., Bessiere, C., Wahbi, M., Benelallam, I.,
and Bouyakhf, E. (2009). Asynchronous interlevel
forward-checking for discsps. In Principles and Prac-
tice of Constraint Programming (CP-09).
Galley, M. (2000). Distributed constraint pro-
gramming platform using sjavap. In
http://cs.fit.edu/Projects/asl/#MELY.
Gershman, A., Meisels, A., and Zivan, R. (2009). Asyn-
chronous forward bounding for distributed cops. In
Journal of Artificial Intelligence Research, 34, 61-88.
Hamadi, Y. (2003). Disolver : A distributed constraint
solver. In Technical Report MSR-TR-2003-91, Mi-
crosoft Research.
JADE (2013). Java agent developpement framework. In
URL http://jade.tilab.com/.
Jussien, N., Rochart, G., and Lorcal, X. (2008). Choco:
an open source java constraint programming library.
In CPAIOR’08 Workshop on Open-Source Software
for Integer and Contraint Programming(OSSICP’08).
France, Paris.
Kitano, H., Tadokoro, S., Noda, I., Matsubara, H., Taka-
hashi, T., Shinjou, A., and Shimada, S. (1999).
Robocup rescue: Search and rescue in large-scale dis-
aster as a domain for autonomous agents research. In
IEEE International Conference on System, Man, and
Cybernetics.
Lutati, B., Levit, V., , and Meisels, A. (2014). Agentzero:
A framework for simulating and evaluating multiagent
algorithms. In Agent-Oriented Software Engineering.
Springer.
Meisels, A. and Lavee, O. (2004). Using additional in-
formation in discsp search. In 5th workshop on dis-
tributed constraints reasoning, DCR’04.
Meisels, A. and Zivan, R. (2007). Asynchronous forward-
checking for discsps. In Constraints 12, 131-150.
Modi, P., Shen, W., Tambe, M., and Yokoo, M. (2005).
Adopt: asynchronous distributed constraints opti-
mization with quality guarantees. In Artificial Intel-
ligence 161:1-2, 149 180.
Petcu, A. (2006). Frodo: a framework for open/distributed
optimization. In Technical Report Technical Re-
port EPFL:2006/001, LIA, EPFL, CH-1015 Lau-
sanne,http://liawww.epfl.ch/frodo/.
Sultanik, E., Lass, R., and Regli, W. (2007). Dcopolis: A
framework for simulating and deploying distributed
constraint optimization algorithms. In CP-DCR.
Wahbi, M., Ezzahir, R., Bessiere, C., and Bouyakhf, E.
(2011). Dischoco 2: A platform for distributed con-
straint reasoning. In DCR’11, pages 112-121. URL
http://www.lirmm.fr/coconut/dischoco/.
Wallace, J. R. and Freuder, C. E. (2002). Constraint-
based multi-agent meeting scheduling: effects of
agent heterogeneity on performance and privacy loss.
In 3rd workshop on distributed constrait reasoning,
DCR’02, pages 176-182.
Yeoh, W., Felner, A., and Koenig, S. (2008). Bnb-adopt: an
asynchronous branch and bound dcop algorithm. In
JChocDisSolver-BridgingtheGapBetweenSimulationandRealisticUse
73

AAMAS08: Proceedings of the 7th international joint
conference on Autonomous agents and multiagent sys-
tems, 591-598.
Yokoo, M. (2000). Algorithms for distributed constraint sat-
isfaction problems: A review. In Autonomous Agents
and multiagent Systems 3, 185-207.
Yokoo, M. (2001). Distributed constraint satisfaction. In
:Foundation of Cooperation in multiagent Systems.
Springer.
Yokoo, M., Durfee, E., Ishida, T., and Kuwabara, K. (1992).
Distributed constraint satisfaction for formalizing dis-
tributed problem solving. In International Conference
on Distributed Computing Systems, 614-621.
Yokoo, M., Durfee, E., Ishida, T., and Kuwabara, K. (1998).
The distributed constraint satisfaction problem: for-
malization and algorithms. In IEEE Transactions on
Knowledge and Data Engineering, 10(5):673-685.
Yokoo, M. and Hirayama, K. (1995). Distributed breakout
algorithm for solving distributed constraint satisfac-
tion problems. In Proceedings of the First Interna-
tional Conference on MultiAgent Systems. MIT Press.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
74
