
Virtual Immersive Environments for Underwater Archaeological
Exploration
Massimo Magrini, Maria Antonietta Pascali, Marco Reggiannini,
Ovidio Salvetti and Marco Tampucci
SILab, Institute of Information Science and Technololgies - CNR, Via G. Moruzzi 1, 56124, Pisa, Italy
Keywords: Underwater Cultural Heritage, Image-based Modelling and 3D Reconstruction, Underwater Optical and
Acoustic Data Processing, Virtual Environment.
Abstract: In this paper we describe a system designed for the fruition of underwater archaeological sites. It is under
development in the ARROWS project (end August 2015, funded by the European Commission), along with
other advanced technologies and tools for mapping, diagnosing, cleaning, and securing underwater and coastal
archaeological sites. The main objective is to make easier the management of the heterogeneous set of data
available for each underwater archaeological site (archival and historical data, 3D measurements, images,
videos, sonograms, georeference, texture and shape of artefacts, others). All the data will be represented in a
3D interactive and informative scene, making the archaeological site accessible to experts (for research
purposes, e.g. classification of artefacts by template matching) and to the general public (for dissemination of
the underwater cultural heritage).
1 INTRODUCTION
Approximately the 72% of the Earth surface is
covered by marine water. The oceans represent a rich
source of discovery and knowledge in several fields,
from ecology to archaeology. In spite of the huge
extension and relevance in affecting the climate
trends and the underwater biology, the seabed
continues to be largely unexplored so far. This is
mostly due to the extreme setting represented by the
underwater environment, a reason why the majority
of the people cannot be involved in the direct
exploration. Indeed, the survey of these locations
typically requires large amounts of funding and
expertise, and may be a serious threat to the explorer
safety. The current computer technologies allow
overcoming these limitations and can extend the
information enclosed in the marine environment to a
wider community. In this scenario, our activity has
been focused on the development of a system with the
purpose of creating virtual scenes as a photorealistic
and informative representation of the underwater
sites. Through the virtualization of marine
environments, a generic user may explore a simulated
scene, realistically replicating the underwater survey
experience. The virtual scene allows the
archaeologists to perform offline analysis of wrecks
and provides the public with a tool to visit the
archeological site, without damage risk or safety
danger.
The system presented in this paper has been
developed in the frame of ARROWS, EU-FP7 project
devoted to the development of low cost technologies
for underwater archaeological site detection and
preservation. In more detail, the ARROWS topics
focus on the realization of tools for underwater sites
mapping, diagnosis and cleaning. To those aims a
team of heterogeneous Autonomous Underwater
Vehicles (AUVs) is currently being developed. These
vehicles sense the environment by means of proper
underwater sensors like digital cameras and side scan
sonar or multibeam echo-sounders. The virtual
representation of the marine seabed is based on the
data captured by the AUVs during the project
missions, data that are exploited both for the detection
of interesting sites as well as for the 3D reconstruction
and virtual environment implementation. The
resulting executable procedure is expected to be
appealing to the generic user: the virtual diving in
underwater scenarios features a wide set of possible
choices in terms of exploration actions, recreating in
a realistic way the survey and the discovery of
relevant archaeological sites. The following sections
53
Magrini M., Pascali M., Reggiannini M., Salvetti O. and Tampucci M..
Virtual Immersive Environments for Underwater Archaeological Exploration.
DOI: 10.5220/0005461700530057
In Proceedings of the 5th International Workshop on Image Mining. Theory and Applications (IMTA-5-2015), pages 53-57
ISBN: 978-989-758-094-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

of the paper contain a description of the procedure
setup for the active scenario realization and the data
employed to enrich the underwater scene. Finally, a
case study will be presented, where the described
method will be applied to the representation of an
underwater archaeological site, based on a data
capture campaign performed in a realistic underwater
scenario.
2 THE SYSTEM, METHODS AND
TECHNOLOGIES
A system designed for the research and dissemination
in underwater archaeology must fulfil many
requirements: it must offer an accurate reproduction
of the site and of the objects lying in it; it must let the
users to explore the scene at their own level of
education, with an interaction as natural as possible,
and possibly allow some actions (e.g. exporting 3D
models). An example of a virtual reality tool devoted
to the visualization of the underwater environment
and to the simulation of underwater robotics is
UWsim (M. Prats, 2012). Our system is a more
sophisticated tool; indeed it meets the need for an
easy but not simplistic visualization of the data
collected and available about an underwater
archaeological site.
The major features of the system, as a tool for
dissemination and research in the underwater cultural
heritage, are listed below:
⋅ Different usage by user type
⋅ Interactive, Informative and Immersive
⋅ Accurate virtual reconstruction.
In order to realize a system able to fulfil the
requirements and purposes described above, the
system has been designed and developed exploiting
the most advanced technologies and enriched with a
set of dedicated functionalities. Indeed, the system is
capable to adapt to the several needs of the user
providing different functionalities to the different
user approaches. By distinguishing two different
kinds of users and, along with them, two different
approaches, the system has been developed as a
technical tool for specialized users and as a powerful
disseminative tool for the public
The system provides a set of scenes that can be freely
explored by the user. These scenes are the results of a
processing pipeline dedicated to the 3D
reconstruction starting from raw data acquired,
exploiting equipped Autonomous Underwater
Vehicle, during dedicated campaign.
The user can interact with the scene objects and
access to additional data concerning them. These data
are:
⋅ videos captured during the ARROWS
missions or already available from pre-
existing resources;
⋅ raw data captured by different sensors
(sonograms, etc.);
⋅ the complete reconstructed 3D mesh of the
objects, displayed separately from the scene
and available for observations from multiple
points of view;
⋅ any supplementary information.
Moreover, the system is connected with a database
that manages historical information about the objects
represented in the scenes. These data describe several
features concerning the object’s dimensions, material
and history (for the archaeologist interest)
information.
The system also provides a set of functionalities
dedicated to measure the model. This tool can be very
useful to obtain further information about the
discover artefacts and, such as in case of jar, to
classify their type and/or define their functions (i.e.
distinguish between funerary, wine and food jar).
2.1 From Data to the 3D Model:
The Pipeline
As mentioned before, data about the underwater
environment are acquired by AUVs during dedicated
mission. The AUVs are equipped by several sensors
(such as optical camera, side scan sonar, etc.) which
data contribute to the reconstruction of the scene. The
processing pipeline in charge of 3D reconstruction is
described in the following.
Once the mission is completed, the data are
downloaded from the AUVs internal memories. The
downloaded data are then processed with algorithm
devoted to the detection of artefacts (D. Moroni 2013
and D. Moroni 2013). System operators can select the
most interesting scenes in order to perform further
accurate analysis and to reconstruct from them the
artefact 3D models. The sequences are analysed
frame by frame. The system automatically calibrates
the video frames, balances the colours and rectifies
other aberration occurred during the acquisition phase
(R. Prados, 2014). Exploiting advanced
photogrammetry algorithms and tools, the system
correlates each extracted frame with the others and
generates a point cloud (stored as a .ply file, a
standard file format of point clouds as well as meshes
containing also RGB information for every point) (O.
IMTA-52015-5thInternationalWorkshoponImageMining.TheoryandApplications
54
Pizarro, 2004 and T. Nicosevici, 2013). From this
point cloud, the system builds an optimized mesh
(created by the triangulation of the Poisson surface
that better fits the point cloud), using dedicated
software such as Meshlab (Meshlab) and/or Blender
(Blender). Finally the mesh is exploited to obtain the
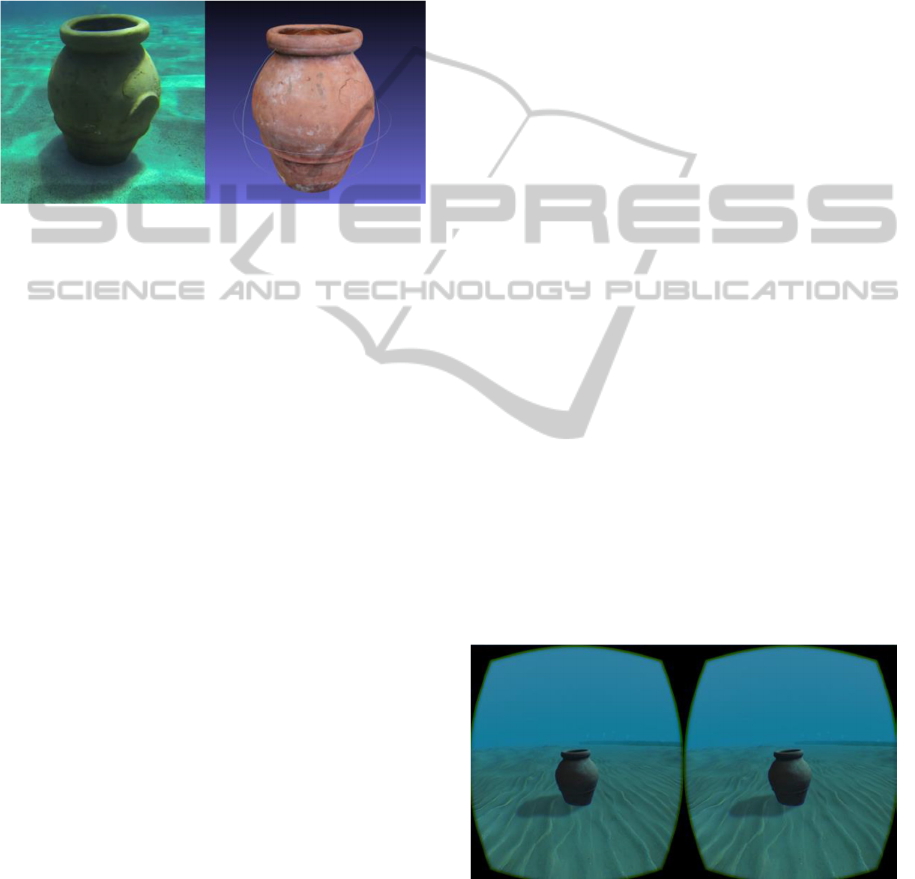
detailed 3D model of the object. Figure 1 shows the
original Jar acquired and, on the right, the final output
of the processing pipeline.
Figure 1: Reconstruction of a jar starting from a video
capture.
Intermediate results of the data processing pipeline
are made also available to perform further analysis on
them: such as the processing outputs of images that
are considered to be of high significance level or
particularly representative of an object, as well as
video excerpts to be directly displayed in 3D
modality.
As a further example, the rectified and properly
filtered optical data can be considered another
intermediate result, computationally quite simple, of
remarkable importance in terms of completeness of
the overall archaeological documentation process.
These intermediate output results turn out to be
particularly useful for the historical experts that
require an early, but at the same time “correct”,
visualization of the captured data, in order to review
and eventually correct the automated tagging
performed by the higher level object detection
algorithms.
2.2 Scene Representation and Fruition
In order to realize an immersive and freely navigable
environment, the generated models have to be placed
into a complex 3D scene. The development of a
rendering system for real-time navigation of a 3D
scene has been lightened by the exploitation of
graphics engines. The graphics engines are suites of
software that provide a set of high and low level
functionalities that also provide the support for the
transformations and event management typical of the
3D navigation: viewpoint change, zoom, object
collisions. The system implementation is based on the
Unity game engine (Unity) since it provides optimal
functionalities for an easy setup of the scene and
advanced management of the interaction with the
scene itself and the included objects.
Aiming at providing a useful tool for technicians and
archaeologists interested into the marine exploration,
the scene has to be also as relevant as possible to the
real explored underwater area. Thus, the global
terrain (seafloor) is reconstructed mainly exploiting
bathymetric sensor data while the objects of interest,
aiming at providing reliable analysis and at making
the environment more immersive and captivating, are
reconstructed exploiting optical data and
photogrammetry techniques (R. Campos, 2015 and P.
Drap, 2011).
The 3D scene navigation is an enhancing field for the
study of the newest interactive technologies,
generally related to videogames. Thanks to the Unity
compatibility with the most advanced gestural
interfaces and visors, the system integrates the
support to the usage of Kinect (Kinect), Leap Motion
(Leap Motion) and Oculus Rift (Oculus Rift). Kinect
and Leap Motion are in charge of recognize the user
gestures and to translate them into actual camera
movements and scene interaction. Oculus Rift is a
stereoscopic visor for the virtual reality that is able to
recognize the head movements and translate them
into the camera rotation inside the 3D scene.
The system exploits Kinect or Leap Motion to move
the user inside the scene and to manage the interaction
with the 3D models and exploits Oculus Rift as a
stereoscopic visor and for camera rotation. This
optional set up increases the system immersivity and
captivity and, in the other hand, provides a simple and
effective way to explore the scene and interact with
the placed objects (Figure 2).
Figure 2: A jar placed into the scene viewed through Oculus
Rift.
As described before, the system provides a set of
dedicated functionalities that allows obtaining further
information or performing analysis and
VirtualImmersiveEnvironmentsforUnderwaterArchaeologicalExploration
55

measurements on the 3D models placed into the
scene. A dedicated interface placed inside the scene
allows the access and the usage of these
functionalities. This kind of interface is available for
each 3D models and can be viewed and accessed
directly during the exploration of the scene (see
Figure 3).
Figure 3: A reconstructed jar with the interactive dedicated
interface displayed.
The system can be accessed both on a dedicated
station equipped with gestural devices and Oculus
Rift and via Web browser.
3 A USE CASE: A JAR LYING ON
A SANDY SEABED
In this section, we will describe a generic usage case
generated starting from an acquisition campaign
performed in a controlled realistic scenario. The
campaign has been focused into the acquisition of a
jar placed on the seabed.
Figure 4: The main menu of the scene navigation system.
Figure 4 shows the main menu of the system that is
displayed when user accesses to the virtual
environment. Main menu contains a button for each
represented scene and the button to quit from the
system. The background scene is static and realized
with acquired data. From the main menu, user can
access to all the reconstructed scenes.
By accessing to the desired scene, the user will have
the navigation control. From now on, the user can
freely explore the scene and interact with the object
placed in it. For instance, Figure 2 shows the interface
through which it is possible to obtain further
information about the jar. In this case, user can view
the stream of the video acquired during the campaign,
view the jar, extrapolated with the scene and without
any light effects (Figure 5), and/or obtain archive
information.
Figure 5: 3D model of the jar extrapolated from the scene
context and without light effects.
The 3D model is observable from multi point of view
and can be rotated without any restriction.
Furthermore, light effects used for increase the scene
immersivity, in this case, are turned off aiming at
obtaining a better reliability of the 3D models.
The archive information of the jar are obtained from
querying a database dedicated to manage historical
data about the object recognized during the
acquisition campaigns along with the sensor data
collected during these campaigns.
4 DISCUSSION AND
CONCLUSIONS
Our system turns out to meet all the requirements
indicated in section 2. Indeed it lets the user to access
both the whole scene and the raw or processed data
about findings in it, at different levels of detail
(depending on the user’s right of access).
The system lets the user explore freely the virtual
scene in a natural way (by the integration of
interaction devices like Kinect or Oculus Rift) and
interact with objects in the scene and to access all data
linked to them (raw data like images or videos, 3D
IMTA-52015-5thInternationalWorkshoponImageMining.TheoryandApplications
56

measurements, geotagging, 3D models, textures,
historical or archival data, links to the web).
Generally each acquisition campaign in the seas is a
high cost - high risk operation for people working in
the mission. The accurate virtual reconstruction offers
scholars and the public (not skilled for real diving) the
possibility of frequent (and safe) visits to the desired
site. Hence the archaeologist is provided with a tool
to perform indirect measurements and to formulate an
historical interpretation on the findings.
This system represents a first step towards a Google
Street View of the Seas for archaeological sites. There
already exists OCEANS Street View, which is
developing the safe and easy access to seas, but our
approach is quite different being more specific in
content (underwater archaeology), purpose
(dissemination and research), and looking for a more
immersive and interactive experience.
ACKNOWLEDGEMENTS
The activity described in this paper has been
supported by the ARROWS project. The project has
received funding from the European Union’s Seventh
Framework Programme for research, technological
development and demonstration under grant
Agreement no. 308724.
The authors would like to thank Dr. Pamela Gambogi,
Executive Archaeologist and Coordinator of the
Underwater Operational Team (N.O.S) of the
Tuscany Archaeological Superintendence.
REFERENCES
R. Campos, R. Garcia, P. Alliez, M. Yvinec. "A Surface
Reconstruction Method for In-Detail Underwater 3D
Optical Mapping". The International Journal of
Robotics Research, vol. 34 no. 1 64-89, January 2015.
eISSN: 1741-3176, ISSN: 0278-3649. DOI:
10.1177/0278364914546536.
P. Drap, D. Merad, J. Boï, W. Boubguira, A. Mahiddine, B.
Chemisky, E. Seguin, F. Alcala, and O. Bianchimani,
"ROV-3D, 3D Underwater Survey Combining Optical
and Acoustic Sensor", in Proc. VAST, 2011, pp.177-
184.
D. Moroni, M.A. Pascali., M. Reggiannini, O. Salvetti
“Curve recognition for underwater wrecks and
handmade artefacts.” In: IMTA-4 - 4th international
Workshop on Image Mining. Theory and Applications
(Barcelona, 23rd February 2013). Proceedings, pp. 14
- 21. SCITEPRESS, 2013.
D. Moroni, M.A. Pascali, M. Reggiannini, O. Salvetti
“Underwater scene understanding by optical and
acoustic data integration.” In: Proceedings of Meetings
on Acoustics (POMA), vol. 17 article n. 070085.
Acoustical Society of America through the American
Institute of Physics, 2013.
T. Nicosevici and R. Garcia. "Efficient 3D Scene Modeling
and Mosaicing", Springer, 2013. ISBN 978-3-642-
36417-4 (Book).
O. Pizarro “Large scale structure from motion for
autonomous underwater vehicle surveys.” PhD Thesis.
Massachusetts Institute of Technology, 2004.
R. Prados, R. Garcia, L. Neumann. "Image Blending
Techniques and their Application in Underwater
Mosaicing", Springer, 2014. ISBN 978-3-319-05557-2
(Book).
M. Prats, J. Perez, J.J. Fernandez, P.J. Sanz "An open
source tool for simulation and supervision of
underwater intervention missions", 2012 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pp. 2577-2582, 7-12 Oct. 2012.
Blender - link available at the address
http://www.blender.org/
Kinect V2 - link available at the address
http://www.microsoft.com/en-
us/kinectforwindows/develop/
Leap Motion - link available at the address
https://www.leapmotion.com/
Meshlab - link available at the address
http://meshlab.sourceforge.net/
OCEANS Street View - link available at the address
https://www.google.com/maps/views/streetview/ocean
s?gl=us.
Oculus Rift - link available at the address
https://www.oculus.com/
Unity - link available at the address http://unity3d.com/
VirtualImmersiveEnvironmentsforUnderwaterArchaeologicalExploration
57
