
ANN-based Classifiers Automatically Generated
by New Multi-objective Bionic Algorithm
Shakhnaz Akhmedova and Eugene Semenkin
Siberian State Aerospace University, Krasnoyarsk, Russian Federation
Keywords: Neural Network Design, Multi-objective Optimization, Nature-inspired Algorithms, Medical Diagnostics.
Abstract: An artificial neural network (ANN) based classifier design using the modification of a meta-heuristic called
Co-Operation of Biology Related Algorithms (COBRA) for solving multi-objective unconstrained problems
with binary variables is presented. This modification is used for the ANN structure selection. The weight
coefficients of the ANN are adjusted with the original version of COBRA. Two medical diagnostic
problems, namely Breast Cancer Wisconsin and Pima Indian Diabetes, were solved with this technique.
Experiments showed that both variants of COBRA demonstrate high performance and reliability in spite of
the complexity of the optimization problems solved. ANN-based classifiers developed in this way
outperform many alternative methods on the mentioned classification problems. The workability of the
proposed meta-heuristic optimization algorithms was confirmed.
1 INTRODUCTION
A classification problem is a problem of identifying
to which predefined group or class an object needs
to be assigned based on a number of observed
attributes related to that object. Many problems in
business, science and industry can be treated as
classification problems. Various intelligent
information processing techniques exist for solving
classification problems, with one of them being an
artificial neural network (ANN).
The ANN models have three primary
components: the input data layer, the hidden layer(s)
and the output measure(s) layer. Each of these layers
contains nodes which are connected to nodes at
adjacent layer(s). Also there is an activation function
on each node. Thus, the number of hidden layers, the
number of nodes on each layer, and the type of
activation function on each node determine the
“ANN structure”. Each connection between neurons
has a weight coefficient; the number of these
coefficients depends on the problem being solved
and the number of hidden layers and neurons. Thus,
the goal is to generate a neural network with a
relatively simple structure which would effectively
solve a given classification problem. Therefore, the
modification of the collective bionic meta-heuristic
called Co-operation of Biology Related Algorithms
(COBRA) (Akhmedova and Semenkin, 2013(1)) for
solving multi-objective optimization problems with
binary variables (COBRA-bm) was used for
selecting the ANN structure.
The weighted summation function for neurons is
typically used in a feed-forward/back propagation
network model. Yet it has been established that
using other optimization methods for tuning the
weight coefficients of a network can be more
efficient (Sasaki and Tokoro, 1999). In this study the
collective bionic meta-heuristic COBRA was used
for the adjustment of the ANN weight coefficients.
Further, in Section 2 the problem statement is
presented. Then in Section 3 the description of the
proposed optimization techniques (COBRA and its
modification for solving multi-objective problems
with binary variables) is given. In Section 4 the
workability of the meta-heuristics is demonstrated
with ANN-based classifier design for two medical
diagnostic classification problems: Breast Cancer
Wisconsin and Pima Indians Diabetes. In the
conclusion results are discussed and directions for
further research are considered.
2 PROBLEM STATEMENT
The tuning of neural network structure and weight
coefficients is considered as the solving of two
unconstrained optimization problems: the first one is
310
Akhmedova S. and Semenkin E..
ANN-based Classifiers Automatically Generated by New Multi-objective Bionic Algorithm.
DOI: 10.5220/0005571603100317
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 310-317
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

a multi-objective problem with binary variables and
the second one is a one-criterion problem with real-
valued variables. The type of variables depends on
the representation of the ANN structure and
coefficients.
First of all let us assume that the maximum
number of hidden layers is equal to m and that the
maximum number of neurons on a hidden layer is
equal to n. So, the maximum number of neurons in a
network is equal to m×n. Frequently, a more
complex neural network solves a given classification
problem at least as well as a less complex network.
However, the large number of weight coefficients,
which depend on the number of the hidden layers
and neurons, influence on the network adjustment
process and later on the decision-making time.
Therefore, the aim of this study was to develop an
algorithm with an automated ANN-based classifier
design with relatively simple structures which would
effectively solve classification problems. Thus, the
structure design of a network was considered as a
multi-objective optimization problem: the first
objective function was related to classification error
and the second objective was related to the
complexity of the structure, which was measured by
the total number of neurons. Both objectives were
minimized.
In this study m and n were equal to 5, so the
maximum number of neurons was equal to 25. We
could have chosen a larger number of layers and
nodes, but our aim was to show that even a network
with a relatively small structure can show good
results if it is tuned with effective optimization
techniques. Each node was represented by a binary
string of length 4. If the string consisted of zeros
(“0000”) then this node did not exist in the ANN.
So, the whole structure of the neural network was
represented by a binary string of length 100 (25×4),
and each 20 variables represented one hidden layer.
The number of input layers depended on the
problem in hand. The ANN has one output layer.
We used 15 differentactivation functionsfor
nodes: sigmoidal, hyperbolic tangent, threshold
function,linearfunction,etc.Alistofthe
activationfunctionsusedaregivenbelow:
;
;1
;exp1/1
3
2
1
xthxf
xf
xxf
(1)
.
;/1
;1exp1/2
;
5.0,1
5.05.0,5.0
5.0,0
;
1,1
11,
1,1
;
;exp
;sin
;
;
;2/exp1
;2/exp
15
14
13
12
11
10
9
8
3
7
2
6
2
5
2
4
xsignxf
xxf
xxf
x
xx
x
xf
x
xx
x
xf
xxf
xxf
xxf
xxf
xxf
xxf
xxf
(2)
For determining which activation function will be
used on a given node the integer that corresponds to
its binary string was calculated; this integer was
assigned as the number of the activation function.
Thus, we used the modification of the
optimization method COBRA for multi-objective
unconstrained problems with binary variables
(COBRA-bm) for finding the best structure and the
original version of COBRA for the adjustment of
every structure weight coefficient. The approach
COBRA-bm was developed with the use of Pareto
optimality theory, so a set of different structures
(non-dominated solutions) were obtained for every
classification problem solved. The aforementioned
set was considered as an ensemble of neural
networks with a weighted averaging decision
making scheme for inferring the ensemble decision
(Jordan and Jacobs, 1994).
3 CO-OPERATION OF BIOLOGY
RELATED ALGORITHMS
3.1 Original COBRA
The method for solving one-criterion unconstrained
real-parameter optimization problems based on the
cooperation of five nature-inspired algorithms such
as Particle Swarm Optimization (PSO) (Kennedy
and Eberhart, 1995), the Wolf Pack Search (WPS)
(Yang, Tu and Chen, 2007), the Firefly Algorithm
(FFA) (Yang, 2009), the Cuckoo Search Algorithm
(CSA) (Yang and Deb, 2009) and the Bat Algorithm
(BA) (Yang, 2010) and called Co-Operation of
ANN-basedClassifiersAutomaticallyGeneratedbyNewMulti-objectiveBionicAlgorithm
311

Biology Related Algorithms (COBRA) was
introduced in (Akhmedova and Semenkin, 2013(1)).
The basic idea of this approach consists in
generating five populations (one population for each
mentioned algorithm) which are then executed in
parallel cooperating with each other.
The algorithm proposed in (Akhmedova and
Semenkin, 2013 (1)) is a self-tuning meta-heuristic.
Therefore there is no need to choose the population
size for algorithms. The number of individuals in the
population of each algorithm can increase or
decrease depending on whether the fitness value is
improving or not. If the fitness value was not
improved during a given number of generations,
then the size of all populations increases. And vice
versa, if the fitness value was constantly improved,
then the size of all populations decreases.
Additionally, each population can “grow” by
accepting individuals removed from other
populations. A population “grows” only if its
average fitness is better than the average fitness of
all other populations. Besides, all populations
communicate with each other: they exchange
individuals in such a way that a part of the worst
individuals of each population is replaced by the
best individuals of other populations.
The performance of the proposed algorithm was
evaluated on the set of benchmark problems from
the CEC’2013 competition in (Akhmedova and
Semenkin, 2013 (1)). This set of 28 unconstrained
real-parameter optimization problems was given in
(Liang et al., 2012); there are also explanations
about the conducted experiments. A validation of
COBRA was carried out for functions with 2, 3, 5,
10, and 30 real variables. Experiments showed that
COBRA works successfully and is reliable on this
benchmark. Results also showed that COBRA
outperforms its component algorithms when the
dimension grows and more complicated problems
are solved.
3.2 COBRA-bm
The binary modification of the algorithm COBRA,
namely COBRA-b (Akhmedova and Semenkin,
2013 (2)), was modified for solving multi-objective
optimization problems, so there was no necessity to
modify component algorithms to solve optimization
problems with binary variables. Development of the
approach COBRA-bm for solving binary-parameter
multi-objective optimization problems required the
use of multi-objective versions of the above-listed
component algorithms. So, all these techniques were
extended to produce a Pareto optimal front directly:
PSO and WPS by using the σ-method (Mostaghim
and Teich, 2003) and the FFA (Yang, 2013), CSA
(Yang and Deb, 2011) and BA (Yang, 2012) as
suggested in corresponding papers.
Consequently, first of all a brief description of
COBRA and its component-algorithms will be given
and then COBRA-bm will be introduced.
3.2.1 Component Algorithms
Initially we will assume that the multiobjective
optimization problem with K objective functions
should be solved, namely all objectives should be
minimized.
The original Particle Swarm Optimization
algorithm (PSO) was discovered through simplified
social model simulation (Kennedy and Eberhart,
1995). It is related to bird flocking, fish schooling
and swarm theory. In the PSO algorithm, each
individual uses information about the best position
found by the whole swarm-population and the best
position found by itself. However there is no single
best position for multiobjective problems. That is
why while solving multiobjective problems by PSO
the procedure of choosing the best position for the
particle has to be modified. For this purpose the σ-
method (Mostaghim and Teich, 2003) was used.
Firstly, the external archive S for nondominated
solutions was generated. For each particle the σ-
parameter was calculated. So for the i-th particle the
current best position was found as follows: the
particle in archive S whose σ-parameter is closest to
the σ-parameter of the i-th particle was chosen as the
best current position for the i-th particle, where
closeness was measured by Euclidean distance.
The WPS algorithm was inspired by research on
the social behaviour of a wolf pack; it simulates the
hunting process of a pack of wolves (Yang, Tu and
Chen, 2007). As in the PSO optimization tool, in the
WPS approach each individual uses information
about the best found position by the whole
population for its movement in the search space. For
modification of the Wolf Pack Search algorithm the
same procedure was used as for the Particle Swarm
Optimization method. Namely, an external archive
of nondominated solutions was generated. And then
the σ-method was applied to search for the current
best wolf.
The Firefly algorithm (FFA) was inspired by the
flashing behaviour of fireflies (Yang, 2009). In the
FFA algorithm all fireflies are unisex so that one
firefly will be attracted to other fireflies regardless
of their sex. For any two flashing fireflies, the less
bright one will move towards the brighter one but if
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
312

there is no brighter firefly than a particular one, then
it will move randomly. The brightness of a firefly is
affected or determined by the landscape of the
objective function.
For multiobjective optimization the Firefly
Algorithm was extended to produce a Pareto optimal
front directly (Yang, 2013). After evaluation of the
brightness or objective values of all the fireflies the
comparison of each pair of fireflies was conducted.
Then a random weight vector is generated (with the
sum of components equal to 1), so that a combined
best solution g* can be obtained. This combined best
solution g* was used in order to fulfil random walks
more efficiently. Also the i-th firefly was attracted
by the j-th firefly (moved towards it) only if it was
dominated by the j-th firefly. And finally the
nondominated solutions are then passed onto the
next iteration.
The Cuckoo Search Algorithm (CSA) is an
optimization algorithm inspired by the obligate
brood parasitism of some cuckoo species by laying
their eggs in the nests of other host birds (of other
species) (Yang and Deb, 2009). CSA uses three
idealized rules. First of all, each cuckoo lays one egg
at a time, and dumps its egg in a randomly chosen
nest. Secondly, the best nests with a high quality of
eggs will carry over to the next generations. And
finally, the number of available host nests is fixed,
and the egg laid by a cuckoo is discovered by the
host bird with a probability p
a
.
For simplicity, this last assumption can be
approximated by the fraction p
a
of the n nests being
replaced by new nests (with new random solutions).
For multiobjective optimization problems with K
different objectives the theory of Pareto optimality
was used and the first and last rules were modified
to incorporate the multiobjective idea (Yang and
Deb, 2011). For multiobjective problems the first
rule can be described as follows: each cuckoo lays K
eggs at a time and dumps them in a randomly chosen
nest, egg k corresponds to the solution to the k-th
objective. And the last rule can be described in this
way: each nest will be abandoned with a probability
pa and a new nest with K eggs will be built
according to the similarities or differences between
the eggs; some random mixing can be used to
generate diversity.
The Bat Algorithm (BA), which is the last
component-method of COBRA, was inspired by
research on the social behaviour of bats (Yang,
2010). The BA is based on the echolocation of bats
that they use to detect prey, avoid obstacles, and
locate their roosting crevices in the dark. For
multiobjective optimization the Bat Algorithm was
also extended to produce a Pareto optimal front
(Yang, 2012). Firstly, an external archive of
nondominated solutions is generated. Then, on each
iteration, all objectives are combined into a single
objective so that the Bat Algorithm is used for single
objective optimization. After that the archive of non-
dominated solutions is updated.
All mentioned algorithms PSO, WPS, FFA, CSA
and BA were originally developed for continuous
valued spaces. Binary modifications of these
algorithms were employed by using the technique
described in the study (Kennedy and Eberhart,
1997). Namely, they were adapted to search in
binary spaces by applying a sigmoid transformation
to the velocity component (PSO, BA) or coordinates
(FFA, CSA, WPS) to squash them into a range [0, 1]
and force the component values of the positions of
the individuals to be 0’s or 1’s.
The basic idea of this adaptation was firstly used
for the PSO algorithm (Kennedy and Eberhart,
1997). In PSO each particle has a velocity (Kennedy
and Eberhart, 1995), so the binarization of
individuals is conducted by the use of the calculation
value of the sigmoid function which is also given in
(Kennedy and Eberhart, 1997). After that a random
number from the range [0, 1] is generated and the
corresponding component value of the position of
the particle is 1 if it is smaller than the sigmoid
function value for that velocity and 0 otherwise.
In BA each bat also has a velocity (Yang, 2009),
which is why exactly the same procedure for the
binarization of this algorithm was applied. Yet in
WPS, FFA and CSA individuals have no velocities.
For this reason, the sigmoid transformation is
applied to the position components of individuals
and then a random number is compared with the
obtained value.
Thus, at first all the mentioned bionic algorithms
were adapted for solving unconstrained multi-
objective real-parameter problems and then modified
for solving optimization problems with binary
variables.
3.2.2 Proposed Technique
The multiobjective modifications of the above-
described bionic algorithms for solving
unconstrained optimization problems with binary
variables were used as component algorithms. For
each component algorithm an external archive S
i
(i =
1, …, 5) of non-dominated solutions was generated
and a general external archive S was created. The
solutions in all archives S
i
were compared and
solutions which were non-dominated among all of
ANN-basedClassifiersAutomaticallyGeneratedbyNewMulti-objectiveBionicAlgorithm
313
them were placed in the archive S.
The development of the multi-objective
modification of optimization tool COBRA
(COBRA-bm) required changes in the procedure of
selecting the winning algorithm and in the migration
operator. For the procedure of selecting the winning
algorithm and migration operator on each stage of
the COBRA-bm execution, K weight coefficients
whose sum is equal to 1 were initialized randomly.
Then all objectives were combined into a single
objective (weighted sum of K objectives). This
single objective was called “fitness” on the current
stage. Therefore, the winning algorithm was
determined by this fitness and for migration
individuals were sorted according to the mentioned
single objective.
To validate the proposed algorithm COBRA-bm,
a subset of test multi-objective problems with
convex, non-convex and discontinuous Pareto fronts
was selected: Schaffer’s Min–Min problem (SCH)
(Schaffer, 1985), Kursawe problem (KUR)
(Kursawe, 1990), Fonseca and Fleming problem
(FAF) (Fonseca and Fleming, 1993), ZDT4 and
ZDT6 problems (Zitzler, Deb and Thiele, 2000). The
mentioned problems are defined as problems with
real-parameter functions; the number of variables for
them varied from 3 to 25. Each real-valued variable
was represented by a binary string with a length of
10 bit. Thus, the number of binary variables varied
from 30 to 250. For the component algorithms the
number of individuals was equal to 50; and the
number of iterations was equal to 1000. So in order
to compare the performance of the proposed
COBRA-bm with its components, the maximum
number of function evaluations for COBRA-bm was
established to be equal to 50000 (50×1000). The
maximum number of Pareto optimal points in the
external set was equal to 200. These settings are
adopted from the papers (Yang, 2013), (Yang and
Deb, 2011) and (Yang, 2012).
After generating Pareto points by COBRA-bm,
the corresponding Pareto front was compared with
the true front. We define the distance between the
estimated Pareto front PF
e
and its corresponding true
front PF
t
as follows:
E = || PF
e
– PF
t
||
2
(3)
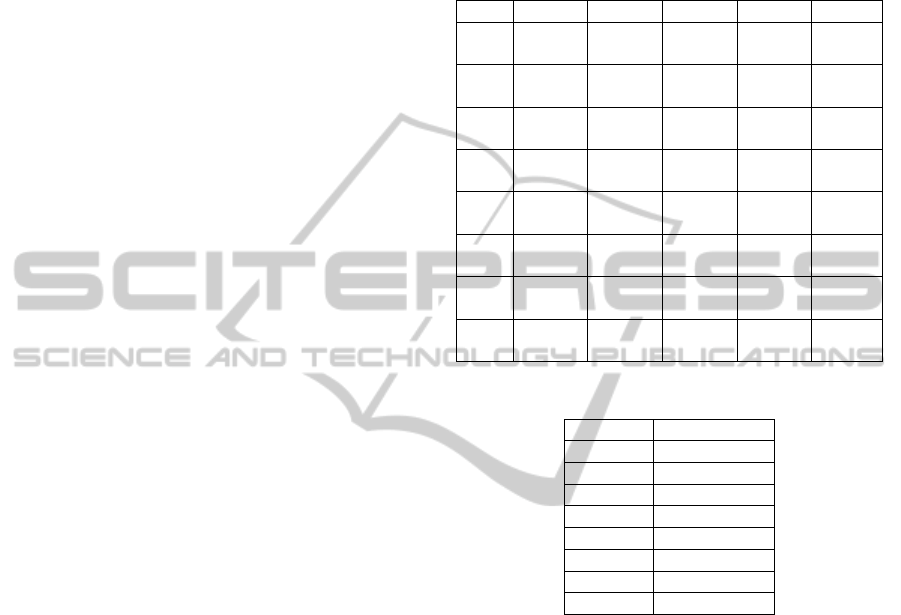
The results obtained by the components and
COBRA-bm are summarized in Table 1 and Table 2.
Thus, the simulations for this subset of test functions
show that the proposed approach COBRA-bm is an
efficient algorithm for solving multi- objective
binary optimization problems. It can deal with
highly non-linear problems with diverse Pareto
optimal sets and different problem dimensions. Also
COBRA-bm outperforms its components; so it could
be recommended for use instead of them.
Table 1: Summary of results for component algorithms.
Func PSO WPS FFA CSA BA
SCH
4.812
e-007
5.083
e-007
4.626
e-007
4.270
e-007
6.099
e-007
KUR
3.017
e-004
3.968
e-004
2.559
e-004
3.229
e-004
4.052
e-004
FAF
(3)
1.026
e-002
1.720
e-002
1.718
e-002
1.799
e-002
1.903
e-002
FAF
(10)
1.089
e-002
7.808
e-003
1.144
e-002
1.686
e-002
2.657
e-002
FAF
(20)
2.727
e-002
2.840
e-002
2.958
e-002
2.918
e-002
3.431
e-002
FAF
(25)
3.681
e-002
3.404
e-002
3.298
e-002
3.032
e-002
5.238
e-002
ZDT4
3.550
e-003
4.009
e-003
4.049
e-003
4.254
e-003
2.572
e-003
ZDT6
1.014
e-003
1.508
e-003
8.204
e-004
7.112
e-004
6.776
e-004
Table 2: Summary of results for COBRA-bm.
Func COBRA-bm
SCH 3.290e-007
KUR 2.071e-004
FAF (3) 2.042e-003
FAF (10) 6.869e-003
FAF (20) 1.193e-002
FAF (25) 2.370e-002
ZDT4 2.336e-003
ZDT6 6.614e-004
4 EXPERIMENTAL RESULTS
In order to load the developed optimization
techniques with a really hard task we chose two
benchmark classification problems: Breast Cancer
Wisconsin and Pima Indians Diabetes. Our choice
was conditioned by the circumstance that these
problems had been solved by other researchers many
times with different methods. Thus there are many
results obtained by alternative approaches that can
be used for comparison.
For Breast Cancer Wisconsin Diagnostic there
are 10 attributes (the patient’s ID that was not used
for calculations and 9 categorical attributes which
possess values from 1 to 10), 2 classes, 458 records
of patients with benign cancer and 241 records of
patients with malignant cancer. For Pima Indians
Diabetes there are 8 attributes (all numeric-valued),
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
314
2 classes, 500 patients that tested negative for
diabetes and 268 patients that tested positive for
diabetes). Benchmark data for these problems was
taken from (Frank and Asuncion, 2010).
From the viewpoint of optimization, for these
problems there are from 145 to 150 real-valued
variables for weight coefficients and 100 binary
variables for selecting the structure. For the structure
selection of the neural network the maximum
number of function evaluations was equal to 900.
For the final weight coefficient adjustment (for the
set of the best obtained structures) the maximum
number of function evaluations was equal to 10000.
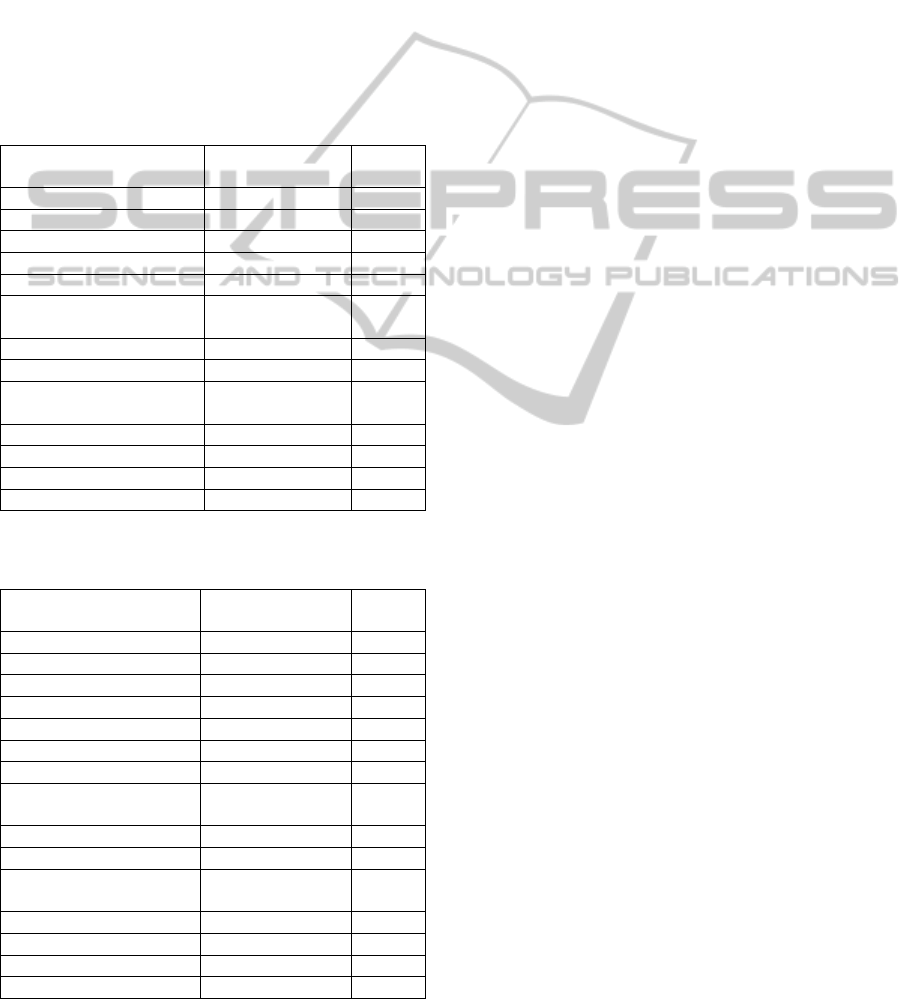
Table 3: Classifier performance comparison for Pima
Indians Diabetes problem.
Author (year) Method
Accuracy
(%)
H. Temurtas et al. (2009) MLNN with LM 82.37
K. Kayaer et al. (2003) GRNN 80.21
This study (2015) ANN+COBRA-bm 80.17
Akhmedova et al. (2014) ANN+COBRA-b 80.15
Akhmedova et al. (2013) ANN+COBRA 79.83
H. Temurtas et al. (2009)
MLNN with
LM(10xFC)
79.62
H. Temurtas et al. (2009) PNN 78.13
H. Temurtas et al. (2009) PNN (10xFC) 78.05
S. M. Kamruzzaman et al.
(2005)
FCNN with PA 77.34
M.R. Bozkurt et al. (2012) DTDN 76.00
M.R. Bozkurt et al. (2012) LVQ 73.60
M.R. Bozkurt et al. (2012) PNN 72.00
L. Meng et al. (2005) AIRS 67.40
Table 4: Classifier performance comparison for Breast
Cancer Wisconsin problem.
Author (year) Method
Accuracy
(%)
Peng et al. (2009) CFW 99.50
Akhmedova et al. (2014) ANN+COBRA-b 98.95
This study (2015) ANN+COBRA-bm 98.80
Albrecht et al. (2002) LSA machine 98.80
Polat, Günes (2007) LS-SVM 98.53
Akhmedova et al. (2014) ANN+COBRA 98.16
Setiono (2000) Neuro-rule 2a 98.10
Karabatak, Cevdet-Ince
(2009)
AR + NN 97.40
Pena-Reyes, Sipper (1999) Fuzzy-GA1 97.36
Ster, Dobnikar (1996) LDA 96.80
Guijarro-Berdias et al.
(2007)
LLS 96.00
Abonyi, Szeifert (2003) SFC 95.57
Nauck and Kruse (1999) NEFCLASS 95.06
Hamiton et al. (1996) RAIC 95.00
Quinlan (1996) C4.5 94.74
The obtained results are presented in Tables 3
and 4 where a portion of the correctly classified
instances from testing sets is presented. There are in
Tables 3 and 4 also results of other researchers and
their approaches found in scientific literature
(Marcano-Cedeno, Quintanilla-Domínguez and
Andina, 2011) and (Temurtas, Yumusak and
Temurtas, 2009).
The results of this study are averaged on 20
algorithm executions. Mostly only 2-4 networks
were obtained as non-dominated solutions in one
program run for each medical diagnostic problem.
Here is an example of the obtained structure for the
Breast Cancer Wisconsin problem (2 neural
networks where the first has 5 hidden layers 10
neurons altogether and the second also has 5 hidden
layers with the total number of neurons equal to 13).
The first network structure: the first layer is
(0100 0010), i.e. neurons with the 4th and 2nd
activation functions; the second layer is (1100
0001), i.e. neurons with the 12th and 1st
activation functions; the third layer is (0101 0100
0000), i.e. neurons with the 5th and 4th
activation functions; the fourth layer is (0011
1100 0010), i.e. neurons with the 3rd, 12th and
2nd activation functions; the fifth layer is (0001),
i.e. neuron with the 1st activation function;
The second network structure: the first layer is
(1000 0001), i.e. neurons with the 8th and 1st
activation functions; the second layer is (0001
0100), i.e. neurons with the 1st and 4th activation
functions; the third layer is (0100 0011 1101
0010), i.e. neurons with the 4th, 3rd, 13th and
2nd activation functions; the fourth layer is
(0100 0010 0100), i.e. neurons with the 4th and
2nd activation functions; the fifth layer is (1000
0001), i.e. neurons with the 8th and 1st activation
functions.
In (Akhmedova and Semenkin, 2014) the same
problems were solved with ANN-based classifiers
automatically generated by the one-criterion
algorithms of COBRA and its binary modification
COBRA-b which demonstrated good results but the
networks designed were too complex. Experiments
show non-significant statistical difference in the
level of performance between the results obtained in
this study and the results from (Akhmedova and
Semenkin, 2014), i.e. essentially bigger ANNs did
not produce a positive effect on the classifier
performance.
ANN-basedClassifiersAutomaticallyGeneratedbyNewMulti-objectiveBionicAlgorithm
315

5 CONCLUSIONS
In this paper a new meta-heuristic, called Co-
Operation of Biology Related Algorithms, was
described, and its modification COBRA-bm was
introduced for solving multi-objective optimization
problems with binary variables.
We illustrated the performance estimation of the
proposed algorithms on subsets of test functions.
Then we used the described optimization
methods for the automated design of ANN-based
classifiers in two medicine diagnosis problems. The
binary multi-objective modification of COBRA was
used for the optimization of classifier structure and
the original COBRA was used for the adjustment of
weight coefficients both within the structure
selection process and for the final tuning of the best
selected structure.
This approach was applied to two real-world
classification problems. Solving these problems are
equivalent to solving big and hard optimization
problems where objective functions have many (up
to 150) variables and are given in the form of a
computational program. The suggested algorithms
successfully solved both problems with competitive
performance that allows us to consider the study
results as the confirmation of the reliability,
workability and usefulness of the algorithms in
solving real world optimization problems.
ACKNOWLEDGEMENTS
Research is performed with the financial support of
the Ministry of Education and Science of the
Russian Federation within the federal R&D
programme (project RFMEFI57414X0126).
REFERENCES
Akhmedova, Sh., Semenkin, E., 2013(1). Co-Operation of
Biology-Related Algorithms. In IEEE Congress on
Evolutionary Computations. IEEE Publications.
Akhmedova, Sh., Semenkin, E., 2013(2). New
optimization metaheuristic based on co-operation of
biology related algorithms, Vestnik. Bulletine of
Siberian State Aerospace University. Vol. 4 (50).
Akhmedova, Sh., Semenkin E., 2014. Co-Operation of
Biology Related Algorithms Meta-Heuristic in ANN-
Based Classifiers Design. In IEEE World Congress on
Computational Intelligence. IEEE Publications.
Fonseca, C.M., Fleming, P.J., 1993. Genetic Algorithms
for Multiobjective Optimization: Formulation,
Discussion and Generalization. In The Fifth
International Conference on Genetic Algorithms.
Frank, A., Asuncion. A., 2010. UCI Machine Learning
Repository. Irvine, University of California, School of
Information and Computer Science.
http://archive.ics.uci.edu/ml.
Jordan, M.I., Jacobs, R.A., 1994. Hierarchical Mixture of
Experts and the EM Algorithm. Neural Computation,
6.
Kennedy, J., Eberhart, R., 1995. Particle Swarm
Optimization. In IEEE International Conference on
Neural Networks.
Kennedy, J., Eberhart, R., 1997. A discrete binary version
of the particle swarm algorithm. In World
Multiconference on Systemics, Cybernetics and
Informatics.
Kursawe, F., 1990. A variant of evolution strategies for
vector optimization. Parallel Problem Solving for
Nature, H.P. Schwefel, R. Männer, Ed. Lecture Notes
Computer Science, Springer-Verlag, Berlin, Vol. 496.
Liang, J.J., Qu, B.Y., Suganthan, P.N., Hernandez-Diaz,
A.G., 2012. Problem Definitions and Evaluation
Criteria for the CEC 2013 Special Session on Real-
Parameter Optimization. Technical Report,
Computational Intelligence Laboratory, Zhengzhou
University, Zhengzhou China, and Technical Report,
Nanyang Technological University, Singapore.
Marcano-Cedeno, A., Quintanilla-Domínguez, J., Andina,
D., 2011. WBCD breast cancer database classification
applying artificial metaplasticity neural network.
Expert Systems with Applications: An International
Journal, vol. 38, issue 8.
Mostaghim, S., Teich, J., 2003. Strategies for finding good
local guides in multi-objective particle swarm
optimization (MOPSO). In IEEE Swarm Intelligence
Symposium. IEEE Service Center.
Sasaki, T., Tokoro, M., 1999. Evolving Learnable Neural
Networks under Changing Environments with Various
Rates of Inheritance of Acquired Characters:
Comparison between Darwinian and Lamarckian
Evolution. Artificial Life 5 (3).
Schaffer, J.D., 1985. Multiple objective optimization with
vector evaluated genetic algorithms. In The 1st
International Conference on Genetic Algorithms.
Temurtas, H., Yumusak, N., Temurtas, F., 2009.
A
comparative study on diabetes disease diagnosis using
neural networks. Expert Systems with Applications,
vol. 36, no. 4.
Yang, Ch., Tu, X., Chen, J., 2007. Algorithm of Marriage
in Honey Bees Optimization Based on the Wolf Pack
Search. In International Conference on Intelligent
Pervasive Computing.
Yang, X.S., 2009 Firefly algorithms for multimodal
optimization. In The 5th Symposium on Stochastic
Algorithms, Foundations and Applications.
Yang, X.S., 2010. A new metaheuristic bat-inspired
algorithm. Nature Inspired Cooperative Strategies for
Optimization, Studies in Computational Intelligence.
Vol. 284.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
316

Yang, X.S., 2012. Bat Algorithm for Multiobjective
Optimization. Bio-Inspired Computation, Vol. 3, no. 5.
Yang, X.S., 2013. Multi-objective firefly algorithm for
continuous optimization. Engineering with Computers,
Vol. 29, issue 2.
Yang, X.S., Deb, S., 2009. Cuckoo Search via Levy
flights. In World Congress on Nature & Biologically
Inspired Computing. IEEE Publications.
Yang, X.S., Deb, S., 2011. Multi-objective cuckoo search
for design optimization. Computers & Operations
Research, Vol. 40.
Zitzler, E., Deb, K., Thiele, L., 2000. Comparison of
multiobjective evolutionary algorithms: empirical
results. Evolutionary Computation, Vol. 8 (2).
ANN-basedClassifiersAutomaticallyGeneratedbyNewMulti-objectiveBionicAlgorithm
317
