Combining Development and Evolution
Case Study: One Dimensional Bin-packing
Christopher Rajah and Nelishia Pillay
School of Mathematics, Statistics and Computer Science, University of KwaZulu-Natal, Pietermaritzburg, South Africa
Keywords: Development, Evolution, Biologically-inspired Computing, Bin-packing.
Abstract: The literature highlights the effectiveness of emulating processes from nature to solve complex optimization
problems. Two processes in particular that have been investigated are evolution and development. Evolution
is achieved by genetic algorithms and the developmental approach was introduced to achieve development.
The developmental approach differs from other metaheuristics in that it does not explore the search space
applying intensification and diversification to a complete candidate solution. Instead intensification and
diversification are performed incrementally, at each step in the process of creating a solution. This is based
on an analogy from nature in which a multicellular organism is created incrementally rather than firstly being
completely developed and then improved to be fitter. Evolution on the other hand is used to explore the space
by applying intensification and diversification to randomly created candidate solutions with the aim of
improving the fitness of these candidate solutions and ultimately producing a solution to the problem. Given
that in nature once an organism is initially developed its development or growth does not stop at that point
but certain cells may continue to grow until a certain point in an organism’s life span, it was felt that the
developmental approach terminated prematurely. It was hypothesized that a combination of both these
processes, instantiated with development and followed by evolution, would better emulate the processes in
nature and would be more effective at exploring the search space. The objective of the research presented in
the paper is to test this hypothesis. In terms of search this would mean combining a metaheuristic that applies
intensification and diversification incrementally at each step on partial solutions to create initial candidate
solutions which are then further explored by a metaheuristic that explores the space of complete candidate
solutions. The one-dimensional bin-packing problem was used as a case study to evaluate these ideas. The
hybridization of the developmental approach and genetic algorithm was found to perform better than each of
these approaches applied separately to solve the problem instances. This study was an initial attempt to test
the above hypothesis and has highlighted the potential of this hybridization. Given this future work will apply
this approach to other combinatorial optimization problems.
1 INTRODUCTION
Banzhaf and Pillay (2007) emphasised the need to
take analogies from nature in order to solve complex
optimization problems. The authors highlight two
processes that are essential for this, namely, evolution
and development. Evolution has been emulated to
solve optimization problems by means of
evolutionary algorithms, such as genetic algorithms
(GAs). The developmental approach (DA) was
created to mimic the process of development in
nature. The authors use the domain of examination
timetabling to illustrate the effectiveness of both these
processes in solving complex optimization problems.
Since its inception there have been some revisions
made to the approach to improve its performance
(Pillay and Banzhaf, 2008; Pillay, 2009; Pillay, 2011;
Rajah and Pillay, 2013). The DA has performed
comparatively well to state of the art approaches in
solving the examination timetabling problem, and
was placed amongst the finalists in the examination
timetabling track of the second international
timetabling competition (McCollum et al., 2008). The
developmental approach takes an analogy from the
development of multicellular organisms. Such
organisms are developed incrementally with different
processes contributing to growth at each stage of
development. Whereas other metaheuristics generally
explore the space of candidate solutions by means of
intensification and diversification (Blum and Roli,
2013), the developmental approach performs
intensification and diversification at each stage of
solution construction, i.e. on the space of partial
solutions at each step of creating a solution.
188
Rajah, C. and Pillay, N..
Combining Development and Evolution - Case Study: One Dimensional Bin-packing.
In Proceedings of the 7th International Joint Conference on Computational Intelligence (IJCCI 2015) - Volume 1: ECTA, pages 188-195
ISBN: 978-989-758-157-1
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Intensification and diversification are achieved by
emulating the cell biology processes, namely, cell
creation, cell division, cell migration and cell
interaction. Most metaheuristics, like genetic
algorithms, generally explore the space of candidate
solutions that have been already constructed. It is
hypothesized that a hybridization beginning with
development followed by evolution will better
emulate the processes in nature. The reasoning behind
this is that in nature once an initial organism is created
by means of development, development is not
necessarily complete. Certain cells of the organism
will continue to develop until a certain point in the
organism’s life space. In terms of search this means
combining a metaheuristic that incrementally
performs intensification and diversification at each
stage of solution construction with a metaheuristic
that will perform further intensification and
diversification in the space of completed candidate
solutions. The main contribution of this research is to
test this combination. It is anticipated that the
developmental approach will identify potential areas
for optima in the search space which the genetic
algorithm will exploit further. The one-dimensional
bin packing problem (1BPP) was chosen as this is a
well-known combinatorial optimization problem and
is in general one of the domains that are used to
evaluate optimization techniques, e.g. the hyper-
heuristic cross-domain challenge for optimization
(Ochoa et al., 2014). The hybridization of both
approaches was found to work well, producing better
results than the individual application of these
methods to solve problem.
Section 2 gives the background to the study.
Section 3 presents the DA for solving the 1BPP. The
hybrid approach, HDA, is described in section 4. The
methodology used to evaluate the DA, GA and the
HDA applied to the 1BPP is described in Section 5.
Section 6 discusses and compares the performance of
the DA, GA and HDA. Section 7 concludes the study.
2 1BPP
The one dimensional bin-packing problem is an NP-
hard combinatorial optimization problem as it cannot
necessarily be solved in polynomial time. The 1BPP
requires that a minimum number of bins be used to
pack items of different sizes. Each bin has the same
capacity and its capacity may not be exceeded. If a
bin is full then a new bin must be used. This study
focuses on the offline version of the problem in which
the size of the item is known prior to packing (Scholl
et al., 1997).
Fleszar and Hindi (2002) used the perturbation
MBS to create an initial solution which is improved
using variable neighbourhood search. The approach
was successfully applied to the Scholl benchmark set.
In the study conducted by Layeb and Chenche (2012)
initial solutions created by hybridizing the first-fit and
best-first heuristics are optimized using tabu search
(Glover and Luguna, 1997) for the Scholl benchmark
set. In the study conducted by Layeb and Boussalia
(2012) the cuckoo search algorithm, incorporating
principles of quantum computing, is used to solve the
Scholl benchmark problem set. Alvim et al. (2004)
applied a hybrid method to solve the 1BPP. An initial
solution is constructed using the best first decreasing
heuristic. A redistribution strategy is used to improve
bin usability in the solution. A tabu search is then
used to improve the solution. The approach was
applied to both the Scholl and Faulkenauer problem
sets and it produced some of the best results in
literature. Scholl et al. (1997) introduced an approach
called BISON to solve the 1BPP. BISON combines a
variation of MTP with new bound and dominance
rules and reduction procedures, tabu search and a
depth-first search branch and bound method, to solve
this problem. The reduction procedures are similar to
MTP but the approach outperforms MTP when
applied to the Scholl benchmark set.
Lima and Yakawa (2003) used a group based
encoding scheme in a genetic algorithm to solve the
problem. The first fit heuristic is used to create each
individual in the initial population. The method was
able to solve three of the 10 problem instances from
the Scholl problem set considered hard to solve.
Rohlfshagen and Bullinaria (2007) make use of a GA
inspired by exon shuffling in nature. The GA solved
8 of the 10 hard problems in the Scholl benchmark
set. Abidi et al. (2013) also made use of a GA to solve
the 1BPP. Half of the initial population is generated
using the first fit heuristic and the rest is randomly
generated. The approach found optimal solutions to
930 instances from the Scholl benchmark set.
Dokeroglu and Cosar (2014) made use of a parallel
grouping algorithm. The approach to generate the
initial population runs on a processor called the
master node. Thereafter, sub-populations (islands)
are run on separate processors, slave nodes, different
from the master node. Problems in both the Scholl
benchmark problem sets and Faulkenauer benchmark
problem sets were solved using this approach.
A more recent direction of research in this domain
include the use of hyper-heuristics (Lopez-Camacho
et al., 2014) to solve this problem. The authors make
use of a selection construction hyper-heuristic to
construct a solution to the bin-packing problem. The
Combining Development and Evolution - Case Study: One Dimensional Bin-packing
189
low-level heuristics used are the first fit decreasing,
best fit decreasing and a subset of the set of Djang and
Finch heuristics. A genetic algorithm is implemented
to explore the heuristic space. The hyper-heuristic
was successfully used to solve both one dimensional
and two dimensional instances.
3 DEVELOPMENTAL
APPROACH FOR 1BPP
This section describes the DA used for 1BPP. First
the overall algorithm is presented and explained.
Then cell creation, cell division, cell interaction and
cell swap are then described. Algorithm 1 illustrates
the DA used for 1BPP.
Algorithm 1: Developmental Approach for 1BPP.
An organism represents a solution to the 1BPP with
all items allocated to bins. Each cell in the organism
corresponds to a bin and size limit of the cell is
equivalent to the bin capacity for the problem. The
algorithm starts by sorting all the items to be packed
according to the saturation degree. The saturation
degree represents the number of cells, i.e. bins, an
item can be placed in. The saturation degree of the
remaining items is recalculated after the placement of
each item. An item is allocated to the cell with the
least residual space after placement. If the item does
not fit into the existing cell a new cell is created.
There is no restriction on the number of cells
contained in the organism. Both the cell interaction
operator and cell swap operators are called on each
iteration. The algorithm ends when all items have
been packed. Cell and organism representation, cell
division, cell interaction, cell swap and fitness
evaluation are described in the sections below.
3.1 Representation and Cell Creation
As mentioned above the organism developed by the
DA represents the solution to the 1BPP and each cell
in the organism represents a bin in the problem.
Figure 1 illustrates an example of an organism that
has three cells. Cell 1 has three items, namely, items
2, 4 and 7. Cell 2 has four items and cell 3 has two
items. An item cannot be allocated more than once to
a cell or be allocated to more than one cell. One item
is allocated on each iteration. The algorithm begins
by creating a single cell an allocating the first item in
the list to it. If the item cannot be allocated to an
existing cell, cell division is performed. The next
section describes the cell division operator.
3.2 Cell Division
Cell division takes place when an item has to be
allocated and the existing cells have reached the size
limit. A new cell is created and the item is placed in
it. Figure 2 shows an organism that has two cells. Cell
1 has items 1 and 2. Cell 2 has items 3 and 4. Item 5
needs to be added to the organism. The item is too
large to fit in either cell. As a result cell division takes
place. After cell division the organism has three cells.
The new cell is cell 3 with item 5 placed in it. The
next section describes the cell interaction process.
3.3 Cell Interaction
The cell interaction operator attempts to move an item
from a randomly chosen cell to another cell in order
to improve the overall fitness of the organism. The
cell interaction operator is illustrated in Figure 3. The
organism contains three cells, one containing items 2,
4 and 7, the second contains items 5, 6, 9 and 10 and
the third items 1 and 3. Cell 1 is chosen at random.
Item 7, shown in bold with grey shading is chosen at
random from cell 1. Cell 3 is chosen at random and
item 7 is moved to it as the move improves the overall
fitness of the organism.
3.4 Cell Swap
Some cell interactions are reciprocal in nature.
During
an exchange cells may swap items between
themselves. The cell swapping operator first
randomly selects two non-empty cells. A single item
from each cell is chosen at random. An attempt is
made to swap the two items between these two cells.
The move is made if the items fit into the receiving
cells and the fitness of the organism is improved by
the swap. The fitness function is discussed in section
Create_Organism()
Begin
Sort the items to be allocated according to their saturation
degree
Create a single cell
Select the item with lowest saturation degree and place in
the first bin.
Repeat
Resort the remaining items
If there is a feasible cell available
Add the item to the cell with least unused space
Else
Perform cell division and place the item in the new cell
Perform Cell Interaction
Perform Cell Swap
Until all items have been scheduled
End
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
190
3.3.2. The cell swapping operator is illustrated in
Figure 4. Cell 1 and cell 3 are randomly chosen. Item
7 from cell1 and item 3 from cell 3 are randomly
chosen. Item 7 from cell 1 is swapped with item 3
from cell 3 as the move results in a fitter organism.
The swapped items are shown in bold with grey
shading
.
3.5 Fitness and Evaluation
The fitness of each organism is calculated using the
function in Equation 1 proposed by Faulkenauer
(1996). All cells have the same capacity. The function
favours cells that have less unused space. The
function returns a value between zero and one, where
a higher value is more desirable. A set of completely
full cells, with no cell being partially full, would
return a value of one.
=
∑
(
/)
where: = number of cells,
= sum of the
size of all items in cell, and C = cell capacity.
4 HYRBRID APPROACH (HDA)
This section presents the hybrid approach. The hybrid
approach combines the DA discussed in section 3
with a genetic algorithm. As previously mentioned
the DA explores the space of partial solutions at each
step in creating a solution whereas the genetic
algorithm applies intensification and diversification
to the space of complete candidate solutions. It is
anticipated that by combining both these approaches
the developmental approach will identify areas of
potential optima which will be further explored by the
genetic algorithm. Firstly, an overview of the
approach is given, followed by a description of the
GA.
The DA, described in section 3, is used to generate
each individual in the initial population optimized by
the GA. Offspring are created using crossover and
mutation and replace their parents in the population.
Tournament selection is used to choose parents to
create successive generations. Individuals are chosen
at random from the population to form a tournament.
The size of the tournament is a parameter value as it
is problem dependent. The winner of the tournament
is the fittest element which is returned as a parent.
The fitness of the organisms generated by the DA
for the initial population is sufficiently high. This
means that highly fit parents that are selected for
recombination already have cells that are well
packed. The crossover operator needs to preserve this
packing in some cells to some extent to ensure that
the DA efforts are not completely lost in
recombination. The following list outlines the steps
followed by the crossover operator:
1. All cells from both parents are sorted in ascending
order according to the amount of unused space within
each cell.
2. An offspring is created by selecting cells from the
list that are mutually exclusive, i.e. only cells
containing items not yet in the offspring are selected.
If there is more than one cell to choose from then a
cell is selected at random.
3. The remaining items are allocated using the first-
fit heuristic.
4. The DA operators cell interaction and cell swap
are invoked in an attempt to improve the offspring’s
fitness. The application of these operators could be
viewed as local search and hence the genetic
algorithm a memetic algorithm.
The mutation operator is responsible for ensuring
some measure of diversity is maintained in successive
generations. The mutation operator works as follows:
1. Select two cells at random in the offspring.
2. Select two items at random from each cell and
attempt to swap them.
5 METHODOLOGY
The DA, GA and HDA were evaluated on the Scholl
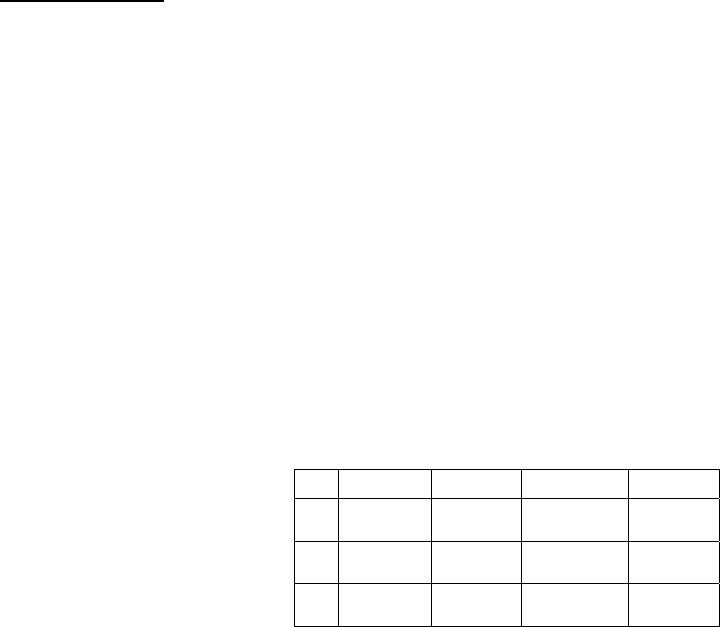
benchmark set for the 1BPP. Table 1 lists the details
of the benchmark set.
Table 1: Scholl Benchmark Set.
Set # Instances Item sizes Bin Capacity # Items
Set1 720 [1-100] {100,120,150
}
{50,100,20
0,500}
Set2 480 [3-9] 1000 {50,100,20
0,500}
Set3 10 [20000-
35000]
100000 200
The benchmark consists of three sets. The first set has
720 instances. Each instance has item sizes in the
range [1,100]. The bin capacities are 100, 120 and
150 and the number of items to be packed is 50, 100,
200 and 500. The second set has 480 instances. The
item sizes are given such that the average number of
Combining Development and Evolution - Case Study: One Dimensional Bin-packing
191
items per bin is in the range [3-9]. The number of
items to be packed is the same as Set1. The third set
has 10 instances. The item sizes are in the range
[20000-35000]. The bin capacity is 100000 and the
number of items is 200. Set 3 is deemed the most
challenging to solve.
The DA, GA and HDA were applied separately to
solve the benchmark problems. The DA, GA and
HDA were applied using three different population
sizes, namely, 100, 300 and 500. This was done to test
the effect of population size on the performance of all
three approaches. Population sizes greater than 500
were not considered. One of the aims of this study is
to test the efficiency of the approaches with smaller
population sizes. In this way computational times can
be kept at acceptable levels. Fifty runs were
performed for each of the population sizes 100, 300
and 500 using a new random number generator seed
for each organism in the population. The tournament
size was fixed at 10. The crossover probability was
set at 0.9 and the mutation probability used was 0.05.
Since the mutation operator attempts to swap items
between two randomly selected bins, it may not
always be successful in that the item intended to be
swapped may not be able to fit into the destination
bin. For this reason the number of attempts for a swap
was set at 100 to avoid the system wasting valuable
computational time unnecessarily. Increasing the
number of attempts beyond this value made little or
no difference to the results achieved. Using a value of
50 was found to be ineffective during testing.
Table 2: GA and HDA parameter values.
Parameter Value
Population sizes 100,300,500
Tournament size 10
Crossover Rate 0.9
Mutation Rate 0.05
To facilitate a comparison in performance of the
GA and HDA, the same parameter values, listed in
Table 2 are used. The fundamental difference
between the GA and HDA is the way the initial
population is generated. In the case of the GA, the
initial population is generated randomly. For the
HDA the DA is used to generate individuals in the
initial population.
The system was implemented in Java using an i5
Core at 2.4 GHz with 4 GB RAM and running
Windows 7 professional. The performance of the DA,
GA and HDA are discussed in the following section.
6 RESULTS AND DISCUSSION
This section reports on the performance of the DA,
GA and HDA described in the previous section in
solving the one-dimensional bin-packing problem.
Section 6.1 examines the performance of the DA, GA
and HDA in solving this problem. Section 6.2
provides a comparison of these methods to other
methods producing the best results for the Scholl
benchmark set.
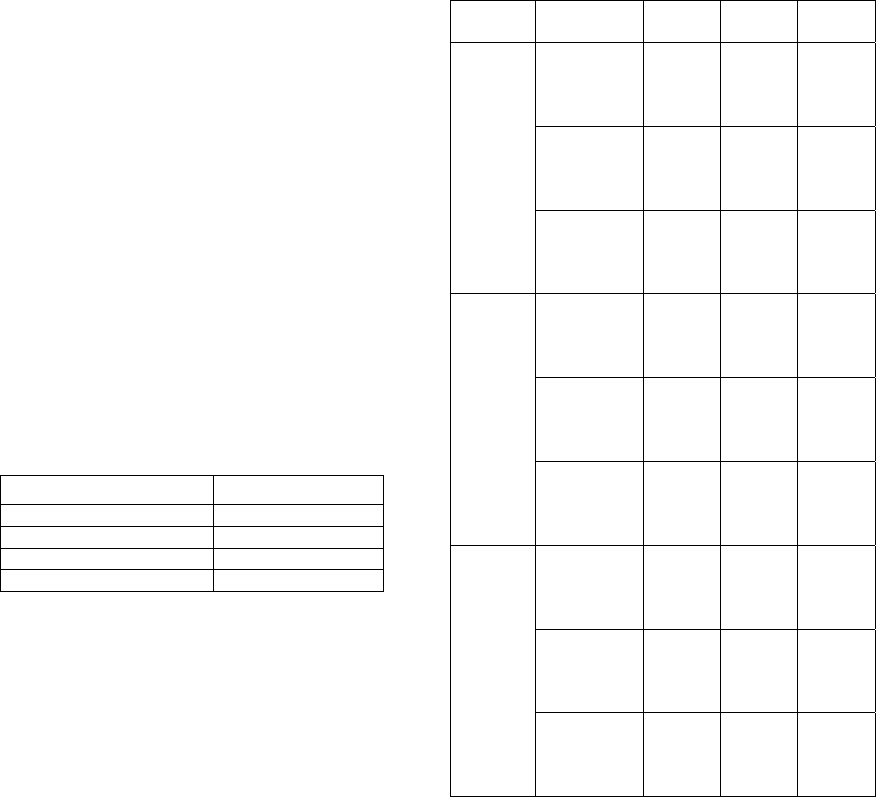
Table 3: DA, GA and HDA results.
Problem
Set
Population
Size
DA GA HDA
Set1 100 A:634
B:632.5
C:2.278
D: 0.19
A:609
B:599.1
C:33.43
D: 3.39
A:712
B:710.8
C:1.289
D:6.895
300 A:685
B:637.7
C:2.011
D: 0.19
A:681
B:673.3
C:22.9
D: 9.58
A:719
B:713.9
C:0.544
D:22.26
500 A:696
B:642.4
C:1.822
D: 0.22
A:700
B:692.8
C:17.07
D:14.32
A:718
B:716.8
C:0.622
D:34.71
Set2 100 A:434
B:432.5
C:0.944
D: 0.12
A:386
B:379.9
C:37.66
D: 5.6
A:464
B:460.9
C:5.211
D:7.394
300 A:461
B:437.1
C:1.433
D: 0.15
A:433
B:431.4
C:8.267
D:16.83
A:468
B:466.4
C:2.933
D:26.75
500 A:453
B:444.3
C:2.322
D: 0.14
A:465
B:461.8
C:3.288
D: 32
A:480
B:471.3
C:4.9
D:41.31
Set3 100 A: 8
B: 8
C: 0
D: 0.5
A: 0
B: 0
C: 0
D: 0.72
A: 8
B: 8
C: 0
D: 4
300 A: 8
B: 8
C: 0
D: 0.5
A: 4
B: 3.1
C:1.211
D:2.917
A: 9
B: 8
C: 0
D:12.92
500 A: 8
B: 8
C: 0
D: 0.4
A: 5
B: 4.1
C:0.767
D:5.928
A: 9
B: 8
C: 0
D:18.39
6.1 DA, GA and HDA Results
Table 3 lists the results obtained by the DA, GA and
HDA for the three sets of problem instances
comprising the Scholl benchmark set. The table lists
the highest number of instances that were solved to
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
192
optimality over the 50 runs (A), the average score and
variance score over the 50 runs (B), the average
variance (C) and the average time taken to produce a
solution (D).
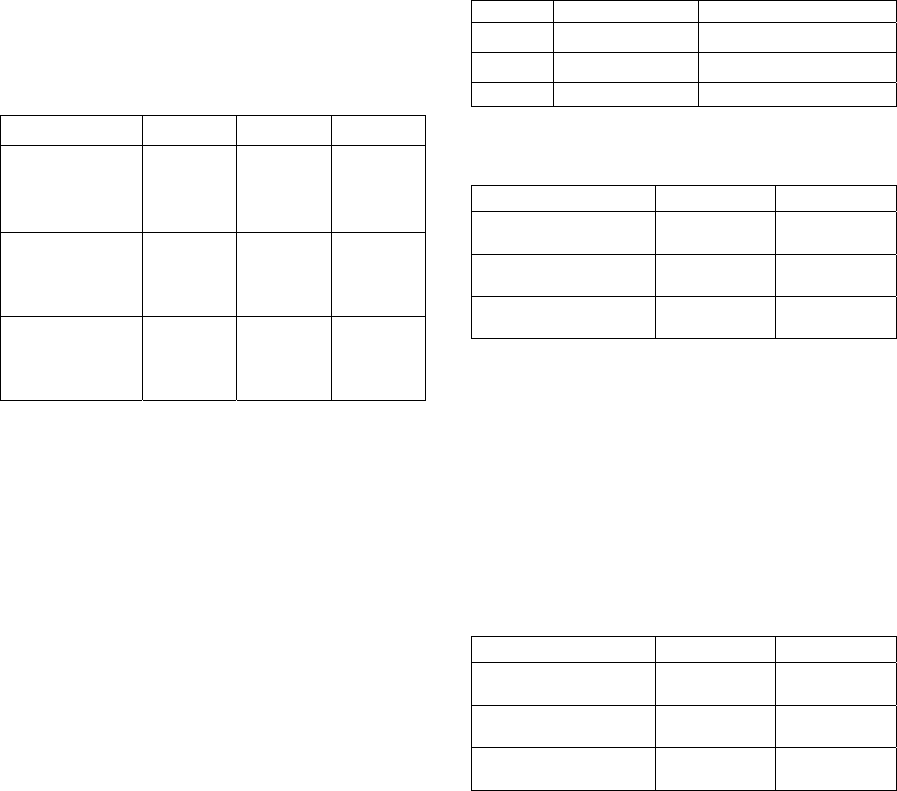
Table 4 shows the standard and absolute deviations
for DA, HDA and GA respectively. The absolute
deviation is how far the result is from the optimal
solution and is represented by the number of bins. The
relative deviation is computed as the absolute
deviation divided by the number of bins in the optimal
solution. The table lists the average absolute
deviation (A), maximum absolute deviation (B),
average relative deviation (C) and the maximum
relative deviation (D) over the 50 runs for each set
using the best population size.
Table 4: Absolute and relative deviations for the DA, GA
and HAD.
Problem Set DA GA HDA
Set1 A: 0.035
B: 2
C: 0.03
D: 2.44
A: 0.015
B: 1
C: 0.08
D: 1.55
A: 0.001
B: 1
C: 0.002
D: 1.14
Set2 A: 0.035
B: 2
C: 0.03
D: 2.44
A: 0.065
B: 2
C: 0.09
D: 3.7
A: 0
B: 0
C: 0
D: 0
Set3 A: 0.035
B: 2
C: 0.03
D: 2.44
A: 0.31
B: 2
C: 0.21
D: 1.99
A: 0.01
B: 1
C: 0.18
D: 1.79
From Table 3 it is evident that the DA performs well
as it achieves the optimal solution in more than 97%
of Set1 instances, more than 96% of the Set2
instances and 80% for the Set3 instances. Increasing
the population size seems to have a minimal impact
on the performance of the DA. For Set1 and Set2, the
GA requires a higher population size to produce
better results than the DA. For Set3, it performs
poorly producing much worse results than the DA.
This shows that it does not scale well to more difficult
problems. Increasing the population size for both the
HDA and GA does result in an overall performance
improvement. However, HDA outperforms the GA
using a smaller population of 100 compared to 500
for Set1. For Set2, the HDA using a population of 100
performs similarly to the GA using a population of
500. A similar performance is noted for Set3 when
comparing HDA to GA. The HDA optimally solved
almost all the instances in Set1, all the instances in
Set2 and almost all the instances in Set3. The absolute
and relative deviation also indicates the superior
performance of the HDA over the DA. The non-
optimal solutions derived by the HDA deviated by at
most one from the known optimal. The processing
time for the DA is considerably shorter than HDA and
GA. The GA takes less processing time than the
HDA.
Hypothesis tests were performed to ascertain the
statistical significance of the result that the HDA
performs better than the DA. The levels of
significance, critical values, and decision rules for
these tests are listed in
Table 5. The hypothesis and
Z-values are shown in Table 6.
Table 5: Levels of Significance, critical values and decision
rules.
P Critical Value Decision Rule
0.01 2.33 Reject Ho if Z > 2.33
0.05 1.64 Reject Ho is Z > 1.64
0.1 1.28 Reject Ho if Z > 1.28
Table 6: Hypothesis and Z values for DA and HDA
comparison.
Hypothesis Dataset Z Values
H
o
: µ
DA
= µ
HDA
H
A
: µ
HDA
> µ
DA
Set1 4.64
H
o
: µ
DA
= µ
HDA
H
A
: µ
HDA
> µ
DA
Set2 4.40
H
o
: µ
DA
= µ
HDA
H
A
: µ
HDA
> µ
DA
Set3 0.62
The hypothesis that HDA performs better than DA
was found to be significant at the 1% level of
significance for Set1 and Set2. The hypothesis that
HDA performs better than DA was not found to be
significant at all levels of significance for Set3.
Hypothesis tests were also performed to ascertain
the statistical significance of the result that the HDA
performs better than the GA. The hypothesis and Z-
values are shown in Table 7.
Table 7: Hypothesis and Z values for GA and HDA
comparison.
Hypothesis Dataset Z Values
H
o
: µ
HDA
= µ
GA
H
A
: µ
HDA
> µ
DA
Set1 37.71
H
o
: µ
HDA
= µ
GA
H
A
: µ
HDA
> µ
GA
Set2 35.27
H
o
: µ
HDA
= µ
GA
H
A
: µ
HDA
> µ
GA
Set3 16.07
The hypothesis that HDA performs better than GA
was found to be significant at all levels of significance
for Set1, Set2 and Set3.
Combining Development and Evolution - Case Study: One Dimensional Bin-packing
193
6.2 Comparison to Previous Work
This section empirically compares the performance of
the DA, GA and the HDA to other work solving the
Scholl benchmark problem set in
Table 8. These
methods are discussed in section 2. The table displays
the number of problem instances that are solved to
optimality for each of the problem sets. For example,
696/720 indicates that 696 instances in a set
consisting of 720 instances were optimally solved. In
some cases the method was not applied to all the
problem instances in a chosen set. For example, the
method by Layeb and Boussalia (2012) was applied
to 15 problem instances from Set1, 16 problem
instances from Set2 and all 10 problem instances
from Set3. Therefore, Table 8 shows that their
method solved all 15 problems instances chosen from
Set1, 4 of the 16 problem instances from Set2 and
none of the 10 problem instances from Set3.
Table 8: Number of instances solved for different methods.
Method Set1 Set2 Set3
DA 696/720 453/480 8/10
GA 700/720 465/480 5/10
HDA 718/720 480/480 9/10
Fleszar and Hindi (2002) 694/720 474/480 2/10
Scholl et al. (1997) 697/720 473/480 3/10
Alvim et al. (2004) 720/720 480/480 10/10
Lima and Yakawa (2003) - - 3/10
Layeb and Boussalia
(2012)
15/15 4/16 0/10
Layeb and Chenche
(2012)
5/5 7/15 0/5
Rohlfshagen and
Bullinaria (2007)
- - 8/10
Dokeroglu and Cosar
(2014)
667/720 412/480 8/10
Abidi et al. (2013) 615/720 315/480 0/10
Lopez-Camacho et al.
(2014)
2/2 2/2 -
The comparisons show that the hybrid
improvement heuristic employed by Alvim et al.
(2004) performs the best for all three problem sets. It
is able to solve all problem instances in all three sets
to optimality. The GA inspired by exon shuffling in
nature (Rohlfshagen and Bullinaria, 2007
) was
applied to Set3 and achieved good results. The HDA
has also implemented crossover operators fashioned
to exon shuffling. This may possibly explain the
similarity in performance with all three methods. The
HDA produced better results than the grouping GA
on both Set 1 and Set 2. This may be partly due to the
strong performance of the DA used in the HDA. The
performance of HDA is the closest to the hybrid
method by Alvim et al. in terms of the number of
problem instances solved to optimality in each
dataset. However, the hybrid method has shorter
processing times. This is due to the fact that the
hybrid method optimizes a single candidate solution.
The HDA optimizes a population of individuals at the
same time. Furthermore, the DA has to solve each
problem 100, 200 or 500 times before the GA is
applied. Thus it can be expected that the runtimes are
higher. The performance of the HDA is closely
followed by the DA for all three datasets. The BISON
method, and the perturbation MBS’ with VNS
achieved similar results for all three sets. Whilst the
DA is comparable in performance to other
biologically inspired methods considered here, the
HDA performs the best.
7 CONCLUSION
Previous work has emphasized the importance of both
evolution and development in solving complex
combinatorial optimization problems. As a result of
this the developmental approach was derived to
emulate the process of development in nature. This
study investigates combining development and
evolution and evaluates this hybridization on a new
problem domain, namely, the one-dimensional bin-
packing problem. The standard operators of the DA,
namely, cell division and cell interaction were
implemented. In addition, a third operator taking an
analogy from cell biology, namely, cell swap, was
needed. The DA's performance in solving this
problem was found to be comparative to other
approaches applied to the Scholl benchmark set. The
HDA performs better than the DA and GA in solving
the one-dimensional bin-packing problem and
comparatively, and in a number of cases better, than
other methods that have been applied to the same
benchmark set. The study has highlighted the
potential of the hybridization of both these
approaches and future work evaluate this hybrid
further on additional problem domains including the
travelling salesman and airplane landing problems.
Further theoretical justification for the performance
of the hybrid will also be investigated.
REFERENCES
Banzhaf, W., Pillay, N., 2007. Why Complex Systems
Engineering Needs Biological Development.
Complexity, Vol. 13, No. 2, 12-21.
ECTA 2015 - 7th International Conference on Evolutionary Computation Theory and Applications
194
Pillay, N., Banzhaf, N., 2008. A Developmental Approach
to the Uncapacitated Examination Timetabling
Problem. In Proceedings of PPSN 2008, Lecture Notes
in Computer Science, 276-285.
Pillay, N., 2009. A Revised Developmental Approach to
the Uncapacitated Examination Timetabling Problem.
In Proceedings of SAICSIT 2009, Gauteng,South
Africa, ACM Press,187-192.
Pillay, N., 2011. A Study of Noise Operators in the
Developmental Approach for the Examination
Timetabling Problem. In Proceedings of the 2011 IEEE
Conference on Intelligent Computing and Intelligent
Systems (ICIS 2011), Guangzhou, China, Vol. 3, 534-
538, IEEE Press, November 2011
Rajah, C., Pillay, N. 2013. A Study of introduction of cell
depletion in the Developmental Approach for the
Uncapacitated Examination Timetabling Problem. In
Proceedings of ORSSA 2013, 102-111.
McCollum, B., McMullan, P., Paechter, B., Lewis, R.,
Schaerf, A., DiGapsero, L., Parkes, A. J., Qu, R., Burke,
E.K., 2008. Setting the research agenda in automated
timetabling: The second international timetabling
competition. INFORMS Journal of Computing, Vol.
22, No.1, 120–130.
Ochoa, G., M. Hyde, T. Curtois, , July 2014 J.A. Vazquez-
Rodriguez, J. Walker, M. Gendreau, G. Kendall, B.
McCollum, A. J. Parkes, S. Petrovic andE.K.
Burke."HyFlex: A Benchmark Framework for Cross-
Domain Heuristic Search". In Proceedings of the
European Conference on Evolutionary Computation in
Combinatorial Optimization (EvoCOP 2012), Lecture
Notes in Computer Science, Vol. 7245, pp. 136-147,
2012.
Blum, C., Roli, A. 2013. Metaheuristics in Combinatorial
Optimization: Overview and Conceptual Comparison.
ACM Computing Surveys, vol. 35, no. 3, 268-308.
Scholl, A., Klein, R., Jurgens, C., 1997. Bison: A Fast
Hybrid Procedure for Exactly Solving the One-
Dimensional Bin Packing Problem. Computers and
Operations Research, vol. 24, no. 7, 626-645.
Flezar, K., Hindi, K. S., 2002. New Heuristics for One-
Dimensional Bin-Packing". Computers and Research,
vol. 29, no. 7, 821-839.
Layeb, A., Chenche, S., 2012. A Novel GRASP Algorithm
for Solving the Bin-Packing Problem. International
Journal of Information Engineering and Electronic
Business, vol. 2, 8-14.
Glover, F., Laguna, M. 1997. Tabu Search, Kluwer
Academic Publishers.
Layeb, A., Boussalia, S. R., 2012. A Novell Quantum
Inspired Cuckoo Search Algorithm for Bin-Packing
Problem. International Journal of Information
Technology and Computer Science, vol. 5, pp. 58-67,
2012.
Alvim, A. C., Ribeiro, C. C., Glover, F., Aloise, D. J., 2004.
A Hybrid Improvement Heuristic for the One-
Dimensional Bin Packing Problem. Journal of
heuristics, vol. 10, 205-229.
Lima, H., Yakawa, T., 2003. A New Design Of Genetic
Algorithm For Bin Packing. Evolutionary Computation
, 2003, CEC '03. The 2003 Congress on Evolutionary
Computation, vol. 2, 1044-1049.
Rohlfshagen, P., Bullinara, J. A. 2007. A Genetic
Algorithm With Exon Shuffling Crossover for Hard Bin
Packing Problems. In GECCO '07 Proceedings of the
9th Annual Conference on Genetic and Evolutionary
Computation, New York, USA, 1365-1371.
Abidi, S., Krichen, S., Alba, E., Molina, J. M., 2013.
Improvement Heuristic for Solving the One-
Dimensional Bin-Packing Problem. In Proceedings of
the 5th International Conference on Modeling,
Simulation and Applied Optimization (ICMSAO), 1-5.
Dokeroglu, T., Cosar, A., 2014. Optimization of One-
Dimensional Bin Packing Problem with Island Parallel
Grouping Genetic Algorithms. Computers and
Industrial Engineering, Vol. 75, 176-186.
López-Camacho, E., Terashima-Marin, H., Ross, P.,
Ochoa, G., 2014. A Unified Hyper-Heuristic
Framework for Solving Bin Packing Problems. Expert
Systems with Applications, vol. 41, no. 15, 6876–6889.
Falkenauer, E., 1996. A Hybrid Grouping Genetic
Algorithm For Bin Packing. Journal of Heuristics, vol.
2, 5-30.
Combining Development and Evolution - Case Study: One Dimensional Bin-packing
195
