
Feature Extraction and Recognition of Rotational Target under the
Sea Background
Bing Zhu
1
, Weixin Gao
1
, Yali Qin
2
, Wenfeng Li
3
and Xianglong Kong
3
1
School of Electronic Engineering, Xian Shiyou University, No.18 Dianzi er Road, Xian Shannxi, China
2
No.210 Institute China Aerospace Science and Technology Corporation, No.8 Dianzi yi Road, Xian Shannxi, China
3
Shanghai Institute of Satellite Engineering, No.3666 Yuanjiang Road, Shanghai, China
Keywords: Sea Clutter Restraint, Time-frequency Transform, Invariant Moment Features, Rotate Plan, Recognition and
Classification.
Abstract: Considering the impact of sea clutter on target classification and recognition, a method based on RBF is
proposed to restrain the actual sea clutter, which can be converted the sea clutter into random noise. After
denosing, a S transform time-frequency approach is used to obtain the two time-frequency distribution images.
They are helicopter and propeller aircraft images with nosie. Then extracted the invariant moment features of
images for target recognition. The simulation results have shown an average accuracy of 85%, which validates
the effectiveness of this method.
1 INTRODUCTION
The signals of sea skimming flying helicopters and
propeller-driven fixed-wing aircrafts are important
types for naval radar to detect and recognize.
Helicopters and propeller aircrafts are equipped with
large long faster rotating rotors. The rotor blades
turning around the rub with periodic high-speed
rotation makes rotor and electromagnetic wave of
radar interact to produce the periodical change of
echo signal in amplitude and phase, which produces
a beneficial feature to identify micro-Doppler
phenomenon. However, sea clutters are serious
constraints on the detectability of target radar echoes
from sea surface or near the surface, so target
identification in the sea conditions is relatively
difficult.
For detection and target recognition of helicopter,
domestic and foreign researchers have carried out
relevant research work. J. Misiurewicz (Misiurewicz
et al., 1997) analyzed various types of helicopters
echo data, founding the rotation effects of the rotor
blades, so the echo data contained scintillation “pulse”
related to rotational speed of the rotor and the number
of rotor blade; G. C. Gaunaard (Gaunaurd and Strifors,
1996) made an effective identification of different
types of targets based on time frequency distribution
by PWVD; Rotander (Rotander and Von Sydow,
1997)proposed to identify the helicopter by the ratio
between the radius rotor of and the number of blade,
however, the analysis is conducted in an environment
which is noise and clutter free; Ding Jianjiang et al.,
analyzed micro-Doppler effects on rotor aircraft,
extracting amplitude, phase, and modulation
characteristics of target echo signal from the time
domain and frequency domain for the classification
and recognition of three types of aircraft.
These studies have not considered target detection
of rotating body in complex conditions. Farina (Gini
and Farina, 1999) detected the rub echo of helicopter
in k distribution clutter background without
considering micro-tremor signal. The RCS of
helicopter rub is generally small, so this method is
only valid for the close-in targets.
In the condition of sea clutter, the spectrum of
target echo signal mixes with sea clutter spectrum,
and the amplitude of target echo signal is not
dominant comparing with amplitude of sea clutter
echo. Using traditional frequency or time domain
processing approach to analyze the target echo signal
interfered by sea clutter is unsatisfactory. Time-
frequency analysis converts radar echo signals from
one-dimensional time or frequency domain to the
joint time-frequency domain for analysis, which can
provide richer target information. The approach of
frequency analysis based on S-transform has the
advantages of Fast Fourier Transform and wavelet
transform, avoiding the disadvantages of both. It has
508
Zhu, B., Gao, W., Qin, Y., Li, W. and Kong, X.
Feature Extraction and Recognition of Rotational Target under the Sea Background.
DOI: 10.5220/0005980805080513
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 508-513
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
good time-frequency concentration, and does not
contain cross terms (Zhu et al., 2015).
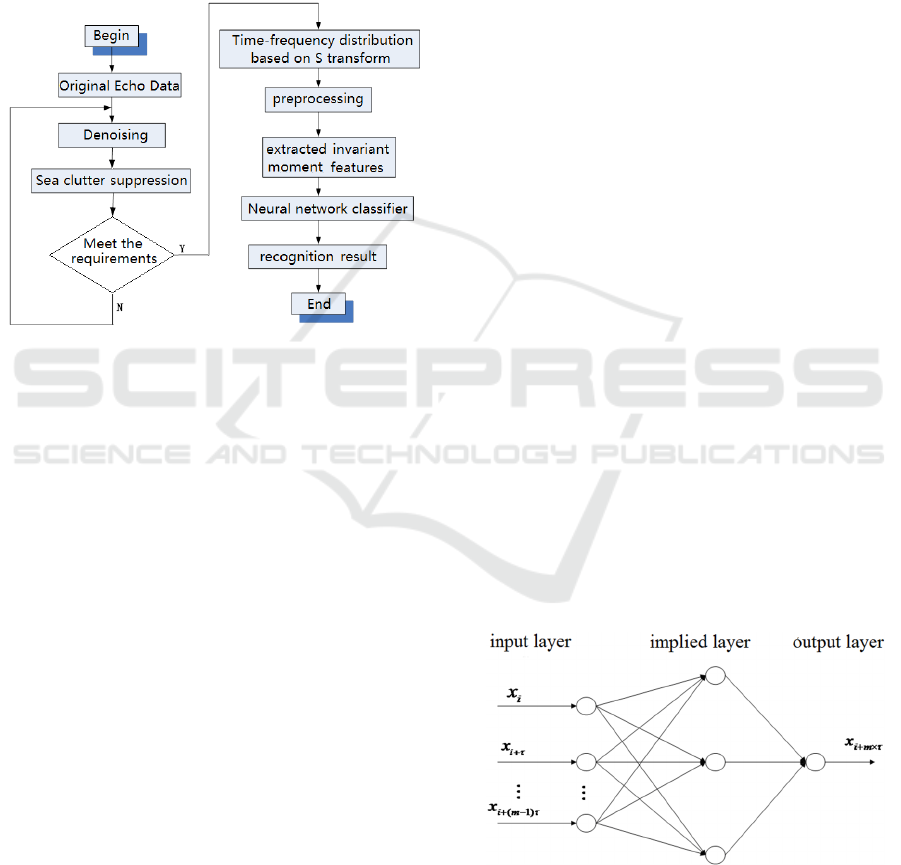
Our proposed framework is shown in figure 1.
Firstly, applicable sea clutter filtering method is
researched; then, combing target recognition method
and spectrogram based on S Transform in the
literature; extracting invariant moments from it, thus
achieving the recognition, extraction and
classification of rotating target under the sea
background.
Figure 1: A flow chart of our method.
Detailed steps are as follows:
(1) Pre-process the original target radar echo data by
filtering and noise reduction;
(2) Suppress preprocessed echo signal with sea clutter,
improving signal-noise ratio;
(3) make s transform for clutter suppressed radar echo
signal, obtaining the image of time-frequency
distribution;
(4) Preprocess the frequency distribution image with
the regularization method;
(5) Extract seven moment invariants features for
regularized image, constituting vector with seven
dimensions;
(6) Feed the moment invariants eigenvector into the
neural network classifier, getting the result by
classification and recognition.
2 FILTERING MODEL OF SEA
CLUTTER BASED ON NEURAL
NETWORK
Traditional description method for sea clutter is to
build classical random statistical model. These
statistical models can only describe changes in sea
clutter from the amplitude; however, the inner
dynamic characteristics generated by sea clutter
cannot be explained. The literature (Haykin and
Puthusserypady, 1997) indicates that quoting chaos
theory into the study of sea clutter is necessary and
feasible. Use phase space reconstruction theory to
obtain internal chaotic dynamics model which
produces sea clutter, then adopting neural network to
study the inherent laws of sea clutter, after that, use
trained neural network to make prediction and
cancellation for sea clutter, and transfer the sea clutter
data with strong amplitude into random noise signal
in strong amplitude, thus achieving the suppression of
sea clutter.
The equation of sea clutter in dynamic systems
can be described as follow:
(1)H(())Xn Xn
(1)
Through the reconstruction of phase space, the
prediction equation of sea clutter can be expressed as:
(1)
(, , )
im i i i m
XFxxx
(2)
Theoretically, if the analytical solution of the
equation is acquired, the predictive value of sea
clutter can be worked out, thus, the suppression of sea
clutter is realized. But solving the analytical solution
is almost impossible. So RBF neural network can be
introduced to predict the equation of sea clutter based
on the known chaotic time series samples of sea
clutter. The schematic diagram of RBF neural
network for prediction is shown in Figure 2. In the
process of forecasting, introduce the observed value
of sea clutter signal at the right side of prediction
equation (2) as RBF input. Input unit is m, which
means that the number of entered layer is equal to the
embedding dimension and RBF network output unit
is appropriate prediction value of sea noise.
Figure 2: Schematic diagram of sea clutter based on RBF
neural network prediction.
Detailed steps of sea clutter suppression based on
neural networks are as follows:
Feature Extraction and Recognition of Rotational Target under the Sea Background
509
(1) Using reconstruction method of phase space to
construct n dimensional training data of, where
the input data is
112
,,
m
Xxxx
,
223 1
,,
m
Xxxx
,…,
1
,,
nnn mn
Xxx x
. Ideal output data:
11m
Yx
,
22m
Yx
,…,
1nmn
Yx
.
(2) Training the RBF neural network with training
data acquired by the construction of phase space,
and working out network structure after training:
()
ii
YfX
, which
1
,,
iii mi
Xxx x
,
1imi
Yx
.
(3) Predicting sea clutter by one-step prediction
method, the result can be expressed as
112 1
(, , )
nnnnm
YfXX X
(4) Making the predictive value subtract from ideal
value of sea clutter data achieving the cancellation
of sea clutter
1nn
YY
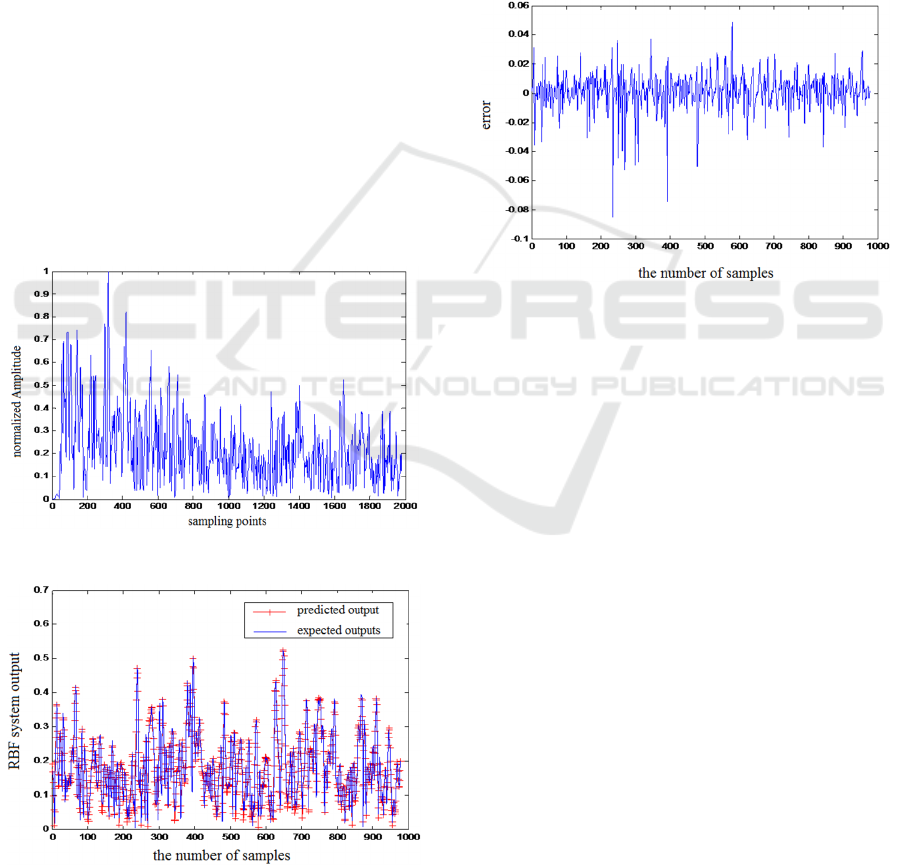
The actual data of sea clutter is used as simulation
data, which length is 1980. Figure 3 shows the
waveform of sea clutter after amplitude normalization.
Figure 3: Sea clutter waveform.
Figure 4: Sea clutter prediction result based on RBF neural
network.
Training and predicting sea clutter based on RBF
neural network. The first 1000 data from collecting
site is used for neural network training, the other 980
is for predicting neural network. With the success of
network training, prediction samples is used for
network prediction of sea clutter, the result is shown
in Figure 4. Network predictionerror, that is, sea
clutter cancellation result is shown in Figure 5.
It can be seen from Figure 5 that RBF neural
network can realize the prediction and cancellation of
sea clutter signal, and transform strong amplitude sea
clutter information into weak amplitude random noise
signal to realize the suppression of sea clutter.
Figure 5: Sea clutter prediction error RBF based on neural
network.
3 TIME-FREQUENCY FEATURE
EXTRACTION AND TARGET
RECOGNITION METHOD
BASED ON S TRANSFORM
Due to the non-stationary, non-Gaussian, and time-
variation of sea clutter signal, traditional time domain
or frequency domain signal processing methods is
difficult to take effect on target detection and
recognition in the condition of sea clutter. The method
of time-frequency analysis converts radar echo
signals from one-dimensional time or frequency
domain to the joint time-frequency domain for
analysis, which can provide richer target information.
The time-frequency distribution of radar echo signals
can be viewed as an image on the plane of two-
dimensional time-frequency distribution, thus the
relevant knowledge of image processing can be
employed to extract target features. For the image, the
moment feature is an extremely valid characteristic,
which mainly characterizes the overall shape of the
target image with invariant features of rotation,
translation, scale and other characteristics. It can
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
510

effectively reflect the essential characteristics of the
image. Time-frequency analysis is used to analyze the
target echo signal interfered by sea clutter, and the
robust features of time-frequency images produced
from various target signal with sea clutter interference
are extracted on the time-frequency plane, which is to
solve the problem of target identification in the sea
condition.
3.1 Time-frequency Analysis of Target
Echo Signal
First of all, time-frequency method is used to analyze
sea clutter. Measured data of sea clutter in the Figure
3 is converted by S Transform, and the corresponding
time-frequency distribution is in the Figure 6. It can
be seen from Figure 6, on the frequency plane, sea
clutter energy mainly concentrates in the low
frequency range, and its energy distribution is
dispersed, with good robustness.
Figure 6: S -Transform frequency spectrums of sea clutter
signals.
3.2 Time-frequency Feature Extraction
and Target Recognition Algorithm
based on S Transform
Moment feature of image usually describes the gene-
ral shape and characteristic, which main idea is to
transform insensitive area- based several moments as
shape characteristics, for the identification of target
image. For a
MN
size digital image, which the
order moment
pq
is defined as:
11
( , ) , 0,1, 2...
MN
pq
pq
ij
Mijfijpq
(3)
pq
central moment is defined as:
()( )(,)
q
p
pq
miijjfij
(4)
where,
10 00 01 00
/, /iM M jM M
(5)
respectively the center of image gray in the horizontal
and vertical directions, also known as the centroid.
Central moment reflects the distribution of gray scale
in the image area comparing with gray center. In order
to get invariant features of moment, the definition of
central moment is normalized as:
00
/ , ( ) / 2 1, 2,3, 4...
r
pq pq
mmrpq pq
(6)
Normalized definition of central moment indicates 7
moment invariants with invariability in translation,
scale, and rotation (among which only has translation
and scale invariance). The definition is as (7):
12002
22
22002 11
22
33012 2103
22
43012 2103
22
5 30 123012 3012 2103
22
21 03 21 03 30 12 21 03
2
620023012 210
()4
(3)(3 )
()()
( 3 )( )[( ) 3( ) ]
(3 )( )[3( ) ( ) ]
( )[( ) (
2
3 1130122103
22
7 21033012 3012 2103
22
30 12 21 03 30 12 21 03
)] 4 ( )( )
(3 )( )[( ) 3( ) ]
( 3 )( )[3( ) ( ) ]
(7)
Table 1: Eigenvector of two types of targets in model features library.
Invariant moments of time-frequency distribution based on S transform
1
2
3
4
5
6
7
Helicopter 5.9741 14.0975 24.0937 22.7050 46.3632 30.2507 46.5574
Feature Extraction and Recognition of Rotational Target under the Sea Background
511

Table 2: Classification results.
Classification rate
Air condition(SNR=8dB) Sea condition(SCR=6dB)
Helicopter 93.33% 90%
Prop 100% 80%
The average recognition rate 96.665% 85%
4 SIMULATION RESULTS
Conduct target echo signal with S Transform
separately from helicopter and propeller aircraft; after
working out its time-frequency distribution, extract
moment invariants feature of image and input them
into neural network classifier for classification and
identification. For simulation, radar and target
parameter are set as same as (Zhu et al., 2015);
according to desired SCR (the ratio of signal to
clutter), adjust data amplitude of sea clutter, and
generate radar echo signal of helicopter and propeller
aircraft in sea condition that SCR=6dB. Collect 45
sets of data for the two objectives respectively and
randomly choose 15 sets of data as training samples,
a total of 30 training samples, another 30 sets of data
as a test sample, a total of 60 test samples, using a
neural network classifier to predict classification,
network prediction results are shown in Fig 7.
Figure 7: Neural network classifiers results.
Table 1 shows eigenvector (average value) of two
types of targets in model library. Figure 2 is based on
S Transform reflecting the recognition result of
moment invariants features in the time-frequency
distribution of target echo signal, which also give the
result of target recognition by using the method of
signal to noise ratio SNR = 8dB (main interference is
Gaussian white noise). The recognition result shows
that it is valid to adopt moment invariant feature to
detect and recognize the target.
5 CONCLUSIONS
Under the sky background, using time-frequency
feature extraction and target recognition method
based on S-transform to recognize target can make
recognition rate of helicopter to 93.33%, the
recognition of propeller aircraft to 100%, and the
average recognition rate of two types of targets to
96.665%.
Under the sea ground, sea clutter interference
makes target recognition rate decline, but after the
introduction of clutter suppression, S-transform based
time-frequency feature extraction and target
recognition method can also reach 90% and 80%
correct recognition rate on helicopters and propeller
aircrafts targets, and average recognition rate of 85%
correspondingly. Time-frequency feature extraction
and target recognition method based on S-transform
are more effective for the detection and recognition of
helicopter and propeller aircraft with a rotating plane,
which are able to reach a certain recognition rate.
ACKNOWLEDGEMENTS
Sponsored by Shaanxi Provincial Science and
Technology Research and Development Program
(2013K09-18), Xi'an shiyou University Youth
Science and Technology Innovation Fund
project(2015BS18), SAST Foundation (Grant No.
SAST2015040).
REFERENCES
Gaunaurd, G. C., & Strifors, H. C. (1996). Signal analysis
by means of time-frequency (Wigner-type)
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
512

distributions-applications to sonar and radar echoes.
Proceedings of the IEEE, 84(9), 1231-1248.
Gini, F., & Farina, A. (1999). Matched subspace CFAR
detection of hovering helicopters. IEEE Transactions
on Aerospace & Electronic Systems, 35(4), 1293-1305.
Misiurewicz, J., Kulpa, K., & Czekala, Z. (1997). Analysis
of recorded helicopter echo. Paper presented at the
Radar 97 (Conf. Publ. No. 449).
Rotander, C. E., & Von Sydow, H. (1997). Classification of
helicopters by the L/N-quotient. 629-633.
Zhu, B, R. X. Yu, & Y. L. Qin. (2015). Analysis and
Simulation of Helicopter Radar Echo Signal Based on
S Transform. Aeronautical Computing Technique, 45(4),
4.
Haykin, S, & Puthusserypady, S., (1997). Chaotic dynamics
of sea clutter. Chaos an Interdisciplinary Journal of
Nonlinear Science, 7(4), 777-802.
Feature Extraction and Recognition of Rotational Target under the Sea Background
513
