
Low Cost Video Animation of People using a RGBD Sensor
Cathrine J. Thomsen, Thomas B. Moeslund and Troels H. P. Jensen
Analysis of People Lab, Aalborg University, Rendsburggade 14, 9000, Aalborg, Denmark
Keywords:
Kinect Sensor, Video Animation, Performance Capture, Segmentation, Optical Flow.
Abstract:
This paper is an investigation in a low cost solution for performing video animation using a Kinect v2 for
Windows, where skeleton, depth and colour data are acquired for three different characters. Segmentation of
colour and depth frames were based on establishing the range of a person in the depth frame using the skeleton
information, and then train a plane of the floor and exclude points close to it. Transitioning between motions
were based on minimizing the Euclidean distance between all feasible transitioning frames, where a source
and target frame would be found. Intermediate frames were made to create seamless transitions, where new
poses were found by moving pixels in the direction of the optical flow between the transitioning frames. The
realism of the proposed animation was verified through a user study to have a higher rate of preference and
perceived realism compared to no animation and animation using alpha blending.
1 INTRODUCTION
Animating people by using marker-based motion cap-
ture has been widely used and is perhaps most known
for the Gollum character in The Lord of the Rings,
where the actor wears a tight suit with reflective mar-
kers. Tracking each of these markers in a multiple-
view studio, when the actor performs different moti-
ons, are then used for controlling the joints of an ani-
mated character performing the same motions. Not
only does the capture using the marker-based appro-
ach require a significant setup time, but it also takes
the actor or actress out of the natural environments
and lacks surface details, such as the dynamics of the
hair and clothing.
Instead, marker-less animation has been introdu-
ced, where different motion sequences are captured
in a multiple-view studio as in (Xu et al., 2011) and
(De Aguiar et al., 2008) using HD cameras. Using a
multiple-view stereo approach, 3D meshes are then
reconstructed independently for each frame, which
means that both shape and appearance of the captu-
red person are preserved.
Recent work within reconstruction and modelling
of people using multiple cameras can result in a re-
alistic yet expensive video animation. The focus of
this paper is to investigate a low-cost solution using
a consumer video and depth cameras, in this case a
Kinect v2 for Windows, capturing sequences to make
a realistic animation of a person, which will build on
previous work within 4D animation. The main contri-
butions of this work are the segmentation and anima-
tion methods in this low-cost solution.
The next section presents the related work within
this topic and the rest of the paper is divided into five
sections. The first section includes how the datasets
are captured, then the segmentation and the animation
methods are described. The paper is finalized by a
user study and a conclusion.
2 RELATED WORK
Capturing various motions of a person, thus having a
library of different motions, new animations can the-
reby be created by combining and transitioning be-
tween related motions in the library. Using a mo-
tion graph (Kovar et al., 2002), a user has the pos-
sibility to control the different movements that a cha-
racter should perform. This motion graph is an ani-
mation synthesis that controls feasible transitioning
points between chosen motions, where all states in the
graph consist of small clips in a video library of that
particular motion.
In order to establish the best transition between
two motions, a similarity measure between the fea-
sible transitioning frames is made. According to a
study of different similarity measures in (Huang et al.,
2010), the shape histogram is the similarity measure
that proved to give the best performance between dif-
244
Thomsen C., Moeslund T. and Jensen T.
Low Cost Video Animation of People using a RGBD Sensor.
DOI: 10.5220/0006132902440249
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 244-249
ISBN: 978-989-758-224-0
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ferent people and motions, also used in (Budd et al.,
2013). The shape histogram subdivides a spherical
coordinate system into radial and angular bins, where
each bin represents the mesh in that specific area. The
similarity measure between two meshes compares all
rotations of the mesh around the centroid for which
the L2 distance is minimum, thus being rotation inva-
riant.
By having a reference mesh, it is possible to com-
pare how well the reconstruction of the surface and
texture of a character is (Casas et al., 2013). But
whether the animations are made in a realistic way
depends on how it is perceived. This means, it is hard
to establish a measure for the realism of the anima-
ted videos without testing how people perceive them.
Hereby, the approach in (Casas et al., 2014), where a
user study was conducted to test the realism of their
videos, would be an appropriate way for assessing an
animation procedure.
3 DATA CAPTURE
A dataset consisting of four characters performing va-
rious motions is used in this work, which are shown
in figure 1 and figure 2, where figure 1 is used for
evaluation and the others are used for testing. The
data was captured with 30 fps using the Kinect v2 for
Windows sensor, which includes a colour data stream
with a resolution of 1920x1080, a depth data stream
with a resolution of 512x324, and finally the skeletal
tracking from the Windows SDK v2.0 consisting of
25 joints per person.
Figure 1: Colour frame 100 of the character used for evalu-
ation waving alternately left and right hand.
Having one or multiple video clips for one parti-
cular motion, a motion graph as in (Starck and Hil-
ton, 2007) is constructed, thus having a database of
each motion for each character. This motion graph is
then used for controlling the transition between each
motion within each character by keeping track of the
current state and the possible transitions. Since the
Figure 2: Colour frame 100 of the characters used for tes-
ting. From the top is character 1 performing dance motions,
character 2 performing stretches and lastly is character 3
performing goalkeeper motions.
captured datasets in this work consists of a full video
of a person performing various motions, the motion
sequences are divided and labelled manually by de-
termining the end and start frame in each of the vi-
deos. The video is divided in such a manner that each
motion sequence do not overlap.
4 SEGMENTATION
Since the background is of no interest when creating
an animation of a person, a segmentation must be per-
formed. The segmentation can be done using the co-
lour or depth frames. If the colour frame is used, illu-
mination changes between the frames as well as back-
ground cluttering must be taken into account. Anot-
her solution is to use the depth frames instead, as in
(Fechteler et al., 2014), which avoids the cluttering
Low Cost Video Animation of People using a RGBD Sensor
245
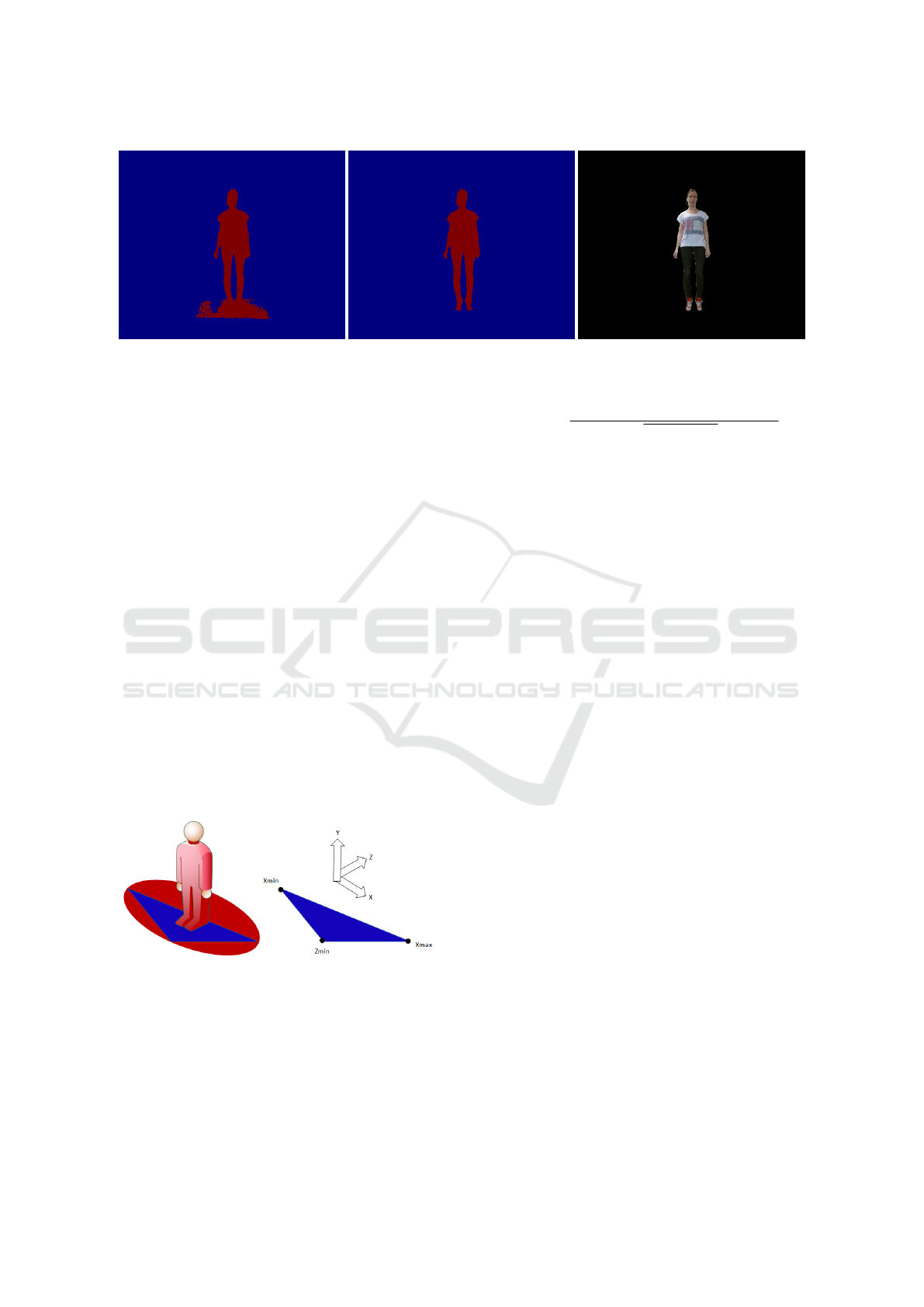
Figure 3: Segmented depth frame using the information from the skeletal joints on the left, and the resulting segmented depth
and colour frame.
and contains less illumination issues. Since the ca-
mera is static, a depth segmentation could be done by
modelling the background of an empty scene. But in
this case, it does not provide a good enough segmen-
tation, therefore another approach must be used.
4.1 Plane Segmentation
With inspiration from the grund plane segmentation
in (Møgelmose et al., 2015), a similar depth-based
approach for the segmentation is proposed. Instead
of establishing a bounding box around the person by
e.g. HOG-detectors on RGB images, a simpler and
faster approach is proposed by using the depth image
only, since the skeleton of the person is available. The
range of the person is therefore established by using
the minimum and maximum positions of the joints
from the skeleton in each direction in the depth image
giving the output shown in figure 3.
Having the range of the person, a plane from the
floor is created by the span of the minimum and max-
imum value in the x-direction and the minimum value
in the z-direction, as illustrated in figure 4.
Figure 4: Illustration of the extraction of the floor plane.
The distance from the plane, α, with a normal
vector, (a, b, c), to a point, (x
0
, y
0
, z
0
) is evaluated
from equation 1, where the points close to the plane
are excluded so only the person remains.
dist
α, point
=
|a(x −x
0
) + b(y −y
0
) + c(z −z0)|
√
a
2
+ b
2
+ c
2
(1)
Since small pixel changes can occur between each
depth frame, an average of planes is used instead of
calculating a new plane for each frame. Experimental
results showed that using 20 frames was sufficient to
construct an average plane. Additional noise left in
the frames were removed by preserving only the big-
gest BLOB using a 4-connectivity connected compo-
nent analysis.
The final segmentation is shown in figure 3. Here
a boolean bitwise AND operation is applied to the
segmented output frame and the original depth frame.
This depth frame is then further used for mapping the
colour frame onto the depth frame. Thereby, the re-
sulting segmented colour frame has the same resolu-
tion as the depth frame of 512x424.
5 TRANSITIONING BETWEEN
MOTIONS
In order to create an animated video, where a segmen-
ted person is shifting between different motions, good
transitions between the motions needs to be determi-
ned. The three modalities captured with the Kinect v2
for Windows; skeleton, depth and colour, are used for
creating a similarity measure. This similarity mea-
sure is used for determining good transitions between
different frames in the video where shape and appea-
rance have a good match.
For each modality, the similarity is calculated as
the Euclidean distance between two feature vectors.
In terms of the colour and depth data, the feature vec-
tors correspons to the unravelled pixels in a frame,
whereas the skeleton’s feature vector corresponds to
the location of each of the 25 joints.
After individual normalization of each similarity
measure by dividing all values with the maximum va-
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
246
lue, they are combined into one similarity measure,
where the weight for each measure are α, β and γ:
S = αS
skel
+ βS
depth
+ γS
colour
α, β, γ ∈ [0, 1] (2)
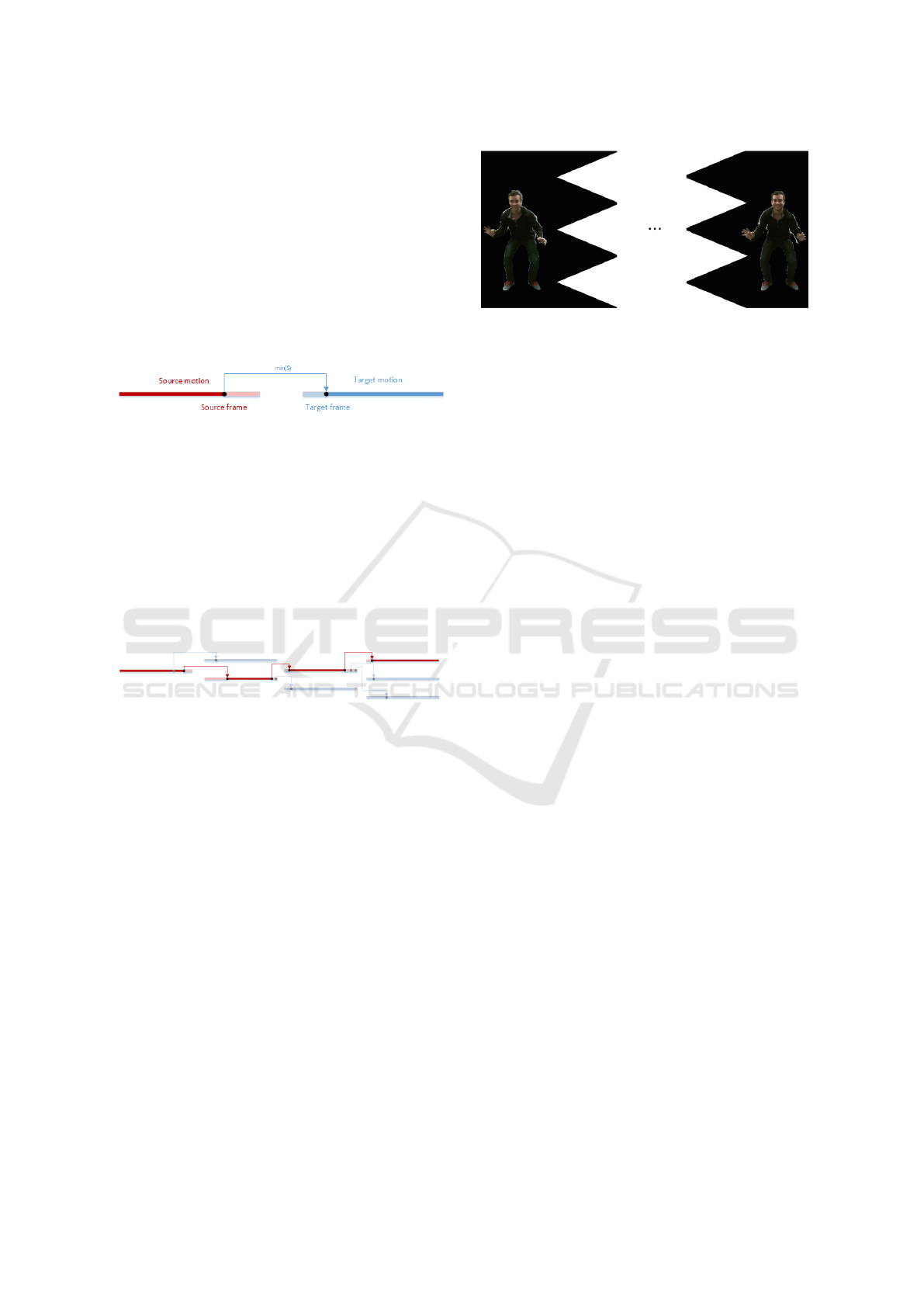
When determining a possible transition between
two motions in a motion graph, a source and a tar-
get motion are established. Minimizing the similarity
measure, S, between the two motions will then find
the two frames with the best transition, as illustrated
in figure 5.
Figure 5: Illustration of searching for the best transition be-
tween two motions is where the similarity measure is mini-
mized over all frames.
If multiple motions are added to a video, the tar-
get motion then becomes the new source motion, and
going through the motion graph and the database of
motions, a new set of one or more possible target mo-
tions are available. Finding the best transition to the
next motion is done, yet again, as illustrated in figure
6, where all frames in the dark red bar are a part of the
resulting video.
Figure 6: Illustration of searching for the best transitions
through multiple motions and the resulting video sequence
marked with dark red.
5.1 Smoothing Transitions
Since the source and target frames can have a diffe-
rence in shape and appearance when transitioning be-
tween these frames, it will create a jump in the re-
sulting video, which is unwanted. An example is gi-
ven in figure 7.
Smoothing the transitions will therefore be nee-
ded, which can be done by creating new intermediate
frames between the source and target frames. Cre-
ating intermediate frames using alpha blending will
result in ghosting (Casas et al., 2014) when the shape
is not similar, as shown in the top of figure 8, which
is unwanted.
Instead, the sparse optical flow between the source
and target frame is established by using the imple-
mentation of Farneb
¨
ack’s optical flow (Farneb
¨
ack,
2003) in OpenCV 2.4.10. The displacement for each
individual pixel between the source and target frame
Figure 7: A source and target frame for the best transition
between two motions where α = β = 1 and γ = 0.
are then gradually moved along this displacement
vector to perform the animation, which is shown in
figure 9.
Due to rounding errors, when doing a zeroth-order
interpolation of the flow vector, holes appear in the
resulting frame. It also happens, when a pixel does
not have a destination of a flow vector from anot-
her pixel. This makes sense when e.g. moving the
arm, where the previous position of the arm should
be empty in the new frame. But this can also happen
inside the body, which must be handled. One appro-
ach to avoid this is to do backward mapping using
the inverse transformation. Although, if a pixel does
not have a destination from the optical flow, it has no
transformation thus no inverse transformation.
Thereby, the empty pixels that need to be filled
after a forward mapping are found by evaluating the
surrounding pixels in the output frame via a median
filter. The resulting animation compared to the alpha
blending is shown in figure 8.
6 USER STUDY
In order to evaluate the perceived realism, when tran-
sitioning between motions, a user study is performed.
10 different settings are each compared for 3 different
characters.
These settings, described in table 1, include diffe-
rent weightings of the three modalities for the simi-
lairy measure, and it also includes transitions with no
animation and with animation based either on alpha
blending or optical flow. The first, second and third
column is the value for the α, β and γ respectively
in equation 2, and the last corresponds to the num-
ber of intermediate animated frames inserted between
a transition, where ”∗” is animation using only alpha
blending.
21 non-experts took part in a web-based survey,
where the test subject was presented with two rando-
mized video pairs, i.e. 45 video pairs for each charac-
ter. Each pair was to be rated from 1 (top preference)
Low Cost Video Animation of People using a RGBD Sensor
247

Figure 8: Animation between the source and target frame from figure 7, the top is based on alpha blending and the bottom is
based on the proposed method.
Figure 9: Illustration of how an intermediate frame is made
based on the proposed method by using optical flow.
Table 1: The parameter settings for each video for each cha-
racter. *Animated frames based on alpha blending.
α (skeleton) β (depth) γ (colour) frames
1 - - -
1 - - 5
1 1 - -
1 1 - 5
1 1 - 5*
1 - 1 5
1 1 1 5
- 1 - 5
- - 1 5
- 1 1 5
to 5 (bottom preference), where 3 was chosen if there
was no preference.
The results obtained for each character are shown
in figure 10, where each setting from table 1 on the
x-axis is labelled with four digits.
Interestingly, the result show that the transitions
with animation based on optical flow using only the
colour data in the similarity measure, received a very
low score, and for the character 2, it even got the
lowest score. The results also show that using the
skeleton information only or adding it to the colour
and depth information gave a higher perceived rea-
lism than other settings.
The results show that the animation based on al-
pha blending was significantly rated as one of the lo-
west for all three characters, and this is followed by
the transitioning with no animation, which also recei-
ved a low score. As an example, using the skeleton
and depth information only with no animation, in fi-
gure 7, shows a difference in shape, and therefore cre-
ates a jump in the output video.
7 CONCLUSIONS
Four datasets of people performing various motions
were captured by acquiring the skeleton, depth and
colour data from a Kinect v2 for Windows sensor. The
motions sequences in each capture were manually di-
vided and inserted in a motion graph to assure only
feasible transitions between motions would happen.
Segmenting the colour and depth frames by lear-
ning a background model proved to be a poor segmen-
tation, thus another approach was suggested. Using
the skeleton information to establish the range of the
body in the depth frame gave a segmentation where
the person and a part of the floor remains. The floor
was then removed by averaging a plane over the first
20 frames of a captured video and excluding points
close to the plane in the rest of the video.
The best transition between a source and target
motion was found by a similarity measure by minimi-
zing the Euclidean distance of a combination of ske-
leton, depth and colour data between all possible fra-
mes. In order to create seamless transitions between
motions, intermediate frames were needed. The sug-
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
248
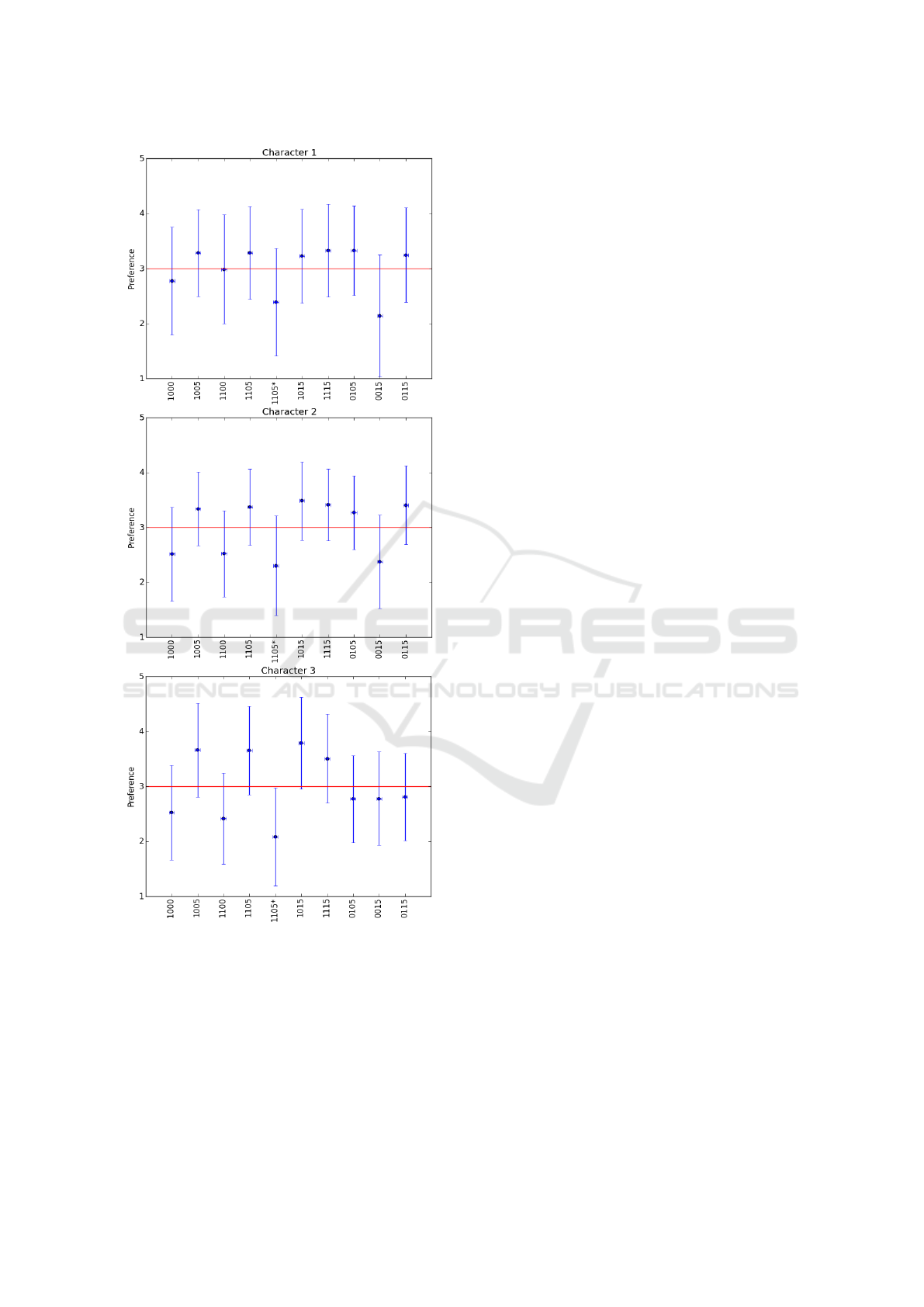
Figure 10: Results for each character obtained from the user
study showing the mean and variance for each setting.
gested approach was to create new poses by estima-
ting the dense optical flow between the transitioning
frames in each direction and then move the pixels step
wise towards the flow and blend the frames from each
direction.
The suggested animation based on optical flow
was compared with animations using a direct al-
pha blending between the transitioning frames and
not performing any animation. This was evaluated
through a web based user study between three diffe-
rent characters. The results showed consistency over
all characters, where the suggested animation with
different similarity measure settings had a higher rate
of preference and perceived realism than using anima-
tions based on alpha blending and using no animation.
Creating an adaptive number of intermediate fra-
mes, which should vary according to the the pose si-
milarity and speed of motion before and after transi-
tioning, could be a possible area for future investiga-
tion.
REFERENCES
Budd, C., Huang, P., Klaudiny, M., and Hilton, A. (2013).
Global non-rigid alignment of surface sequences.
International Journal of Computer Vision, 102(1-
3):256–270.
Casas, D., Tejera, M., Guillemaut, J.-Y., and Hilton, A.
(2013). Interactive animation of 4d performance cap-
ture. IEEE transactions on visualization and computer
graphics, 19(5):762–773.
Casas, D., Volino, M., Collomosse, J., and Hilton, A.
(2014). 4d video textures for interactive character ap-
pearance. In Computer Graphics Forum, volume 33,
pages 371–380. Wiley Online Library.
De Aguiar, E., Stoll, C., Theobalt, C., Ahmed, N., Sei-
del, H.-P., and Thrun, S. (2008). Performance capture
from sparse multi-view video. In ACM Transactions
on Graphics (TOG), volume 27, page 98. ACM.
Farneb
¨
ack, G. (2003). Two-frame motion estimation based
on polynomial expansion. In Scandinavian conference
on Image analysis, pages 363–370. Springer.
Fechteler, P., Paier, W., and Eisert, P. (2014). Articulated
3d model tracking with on-the-fly texturing. In 2014
IEEE International Conference on Image Processing
(ICIP), pages 3998–4002. IEEE.
Huang, P., Hilton, A., and Starck, J. (2010). Shape simila-
rity for 3d video sequences of people. International
Journal of Computer Vision, 89(2-3):362–381.
Kovar, L., Gleicher, M., and Pighin, F. (2002). Motion
graphs. In ACM transactions on graphics (TOG), vo-
lume 21, pages 473–482. ACM.
Møgelmose, A., Bahnsen, C., and Moeslund, T. B. (2015).
Comparison of multi-shot models for short-term re-
identification of people using rgb-d sensors. In Inter-
national Joint Conference on Computer Vision, Ima-
ging and Computer Graphics Theory and Applicati-
ons 2015.
Starck, J. and Hilton, A. (2007). Surface capture
for performance-based animation. IEEE Computer
Graphics and Applications, 27(3):21–31.
Xu, F., Liu, Y., Stoll, C., Tompkin, J., Bharaj, G., Dai,
Q., Seidel, H.-P., Kautz, J., and Theobalt, C. (2011).
Video-based characters: creating new human perfor-
mances from a multi-view video database. ACM Tran-
sactions on Graphics (TOG), 30(4):32.
Low Cost Video Animation of People using a RGBD Sensor
249
