
Eating and Drinking Recognition via Integrated Information
of Head Directions and Joint Positions in a Group
Naoto Ienaga, Yuko Ozasa and Hideo Saito
Graduate School of Science and Technology, Keio University, Yokohama, Japan
{ienaga, saito}@hvrl.ics.keio.ac.jp, yuko.ozasa@keio.jp
Keywords:
Action Recognition, Long Short-term Memory, Information Fusion.
Abstract:
Recent years have seen the introduction of service robots as waiters or waitresses in restaurants and cafes.
In such venues, it is common for customers to visit in groups as well as for them to engage in conversation
while eating and drinking. It is important for cyber serving staff to understand whether they are eating and
drinking, or not, in order to wait on tables at appropriate times. In this paper, we present a method by which
the robots can recognize eating and drinking actions performed by individuals in a group. Our approach uses
the positions of joints in the human body as a feature and long short-term memory to achieve a recognition
task on time-series data. We also used head directions in our method, as we assumed that it is effective for
recognition in a group. The information garnered from head directions and joint positions is integrated via
logistic regression and employed in recognition. The results show that this yielded the highest accuracy and
effectiveness of the robots’ tasks.
1 INTRODUCTION
Of late, service robots have been deployed in many
fields and for a variety of reasons. For example, they
have been used as cyber serving staffs in restaurants,
cafes, and so on (Pieska et al., 2013; Qing-Xiao et al.,
2010). Most of these robots do not appreciate the sub-
tleties of a situation (that is, what customers are do-
ing) and merely serve dishes in a mechanical manner.
This is in contrast to their human counterparts, who
are able to serve at appropriate times and behave in
a suitable manner. For example, they never talk to
customers when the latter are eating or drinking. In
order to improve the performance of the robots, it is
important to make them understand when customers
are eating or drinking.
There are many methods by which such actions
can be recognized (Amor et al., 2016; Chua et al.,
2014; Iosifidis et al., 2012; Wang et al., 2014). As-
sessing the joint positions of the human body is a
particularly powerful technique; Du et al. (Du et al.,
2016) presented one such approach. What makes it
effective is that we also use joint positions for eating
and drinking recognition.
It is common for customers to frequent restaurants
or cafes in groups. This means that a conversation
will most likely be going on alongside the produce
consumption. We may also make the following as-
sumptions in such a scenario: (1) when one of the cus-
tomers is speaking, the others may be looking at him
or her; (2) one cannot speak while eating or drinking;
(3) when some of the customers are eating or drink-
ing, the others may be speaking. Considering these
assumptions, head directions are also useful for eating
and drinking recognition when it comes to groups.
In this paper, we propose a method to enable
such recognition for robot servers. There have been
no studies performed eating and drinking recogni-
tion in a group. Both joint positions and head di-
rections are used, and integrated with logistic regres-
sion (LR) (Bishop, 2006). To handle the time se-
quence of actions, we use long short-term memory
(LSTM) (Hochreiter and Schmidhuber,1997) as same
as the method in (Du et al., 2016). In the exper-
iment, we compared the results of using only joint
positions, only head directions, and the integration
of both. Since there have been no datasets suitable
for our purpose, a dataset is constructed. The results
show that recognition accuracy is the highest when
we integrate both joint positions and head directions.
The main novelties of our work are summarized
as follows:
• A new task setting; eating and drinking recog-
nition as applied to each customer who come to
restaurants or cafes in a group, and interact each
other such as having a conversation.
Ienaga, N., Ozasa, Y. and Saito, H.
Eating and Drinking Recognition via Integrated Information of Head Directions and Joint Positions in a Group.
DOI: 10.5220/0006200305270533
In Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2017), pages 527-533
ISBN: 978-989-758-222-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
527

• Integrating joint positions and head directions via
LR.
2 RELATED WORKS
Action recognition is one of the most widely studied
tasks in the computer vision area. It has various ap-
plications, such as in video surveillance (Nayak et al.,
2015), sports analysis (Swears et al., 2014), robot ac-
tion (Koppula and Saxena, 2016), and so on.
Recently, skeletons have frequently been used for
action recognition. For example, Amor et al. pro-
posed a framework for analyzing human actions using
the shape evolutions of skeletons (Amor et al., 2016).
Ding et al., meanwhile, recognized human actions
based on skeletons with a profile hidden markov mod-
els (Ding et al., 2015). In another study, Vemulapalli
et al. represented skeletons in a new way that explic-
itly modeled the 3D geometric relationships between
various body parts using rotations and translations in
3D space (Vemulapalli et al., 2014). Elsewhere, Wang
et al. achieved high speed recognition by extracting
discriminative features (Wang et al., 2014). Finally,
Du et al. proposed an end-to-end hierarchical RNN
model with LSTM neurons for skeleton-based action
recognition (Du et al., 2016). We also use joint posi-
tions and LSTM.
Head directions are often used in speech analysis
or communication modeling areas (Ishii et al., 2016;
Nihei et al., 2014), but rarely in the computer vision
field. In this study, the focus is on enabling service
robots to recognize eating and drinking actions of
customers who are having a conversation with their
dining compatriots while eating or drinking, meaning
that head directions are also useful for our purposes.
For example, when talking to others, we look at their
faces and therefore cannot eat or drink also because
we can’t talk with our mouth full. In addition, when
we listening to others, we also look at them. Consid-
ering these assumptions, the analysis of head direc-
tions is appropriate for our study.
There have been a few studies focusing on eating
and drinking recognition. For example, Iosifidis et al.
recognized eating and drinking by using regions of
the head and hands in a binary image (Iosifidis et al.,
2012). They concatenated these images to produce a
3D volume, in which the third dimension referred to
time. In our study, we handle time sequence using
LSTM. In another study, Chua et al. made a feature
of hand grasping postures and some rules to recog-
nize drinking (Chua et al., 2014). They recognized
only drinking, as we recognize both drinking and eat-
ing. Both of the abovementioned studies looked at
Figure 1: Environment setup in our work. The numbers
denote ID labels of subjects i.
Figure 2: One frame of the dataset.
individual actions, which we also do, but related them
to the context of the group.
Our method assess both joint positions and head
directions. To consider the differences in charac-
teristics between these, we integrate the recognition
results of both and use them for the recognition.
This is called the score level fusion method (Ozasa
et al., 2015). LR is widely used for such a method.
While there have been some studies that have used
the Bayesian network instead of LR, the recognition
accuracy of the former is lower than that of the latter
(Ozasa and Ariki, 2012). Therefore, in our study, we
use LR.
3 TASK SETTING
As there have been no datasets that are suitable for
our purposes, we construct a dataset. In order to re-
produce a restaurant setting, we build our dataset in
the environment shown in Figure 1.
There are four subjects, who are facing each other
in two sets. Two dishes (a main dish and a dessert)
and one drink are prepared for them. Two Microsoft
Kinect v2s are located at the center of the table.
To record the joint positions and head directions of
the subjects of each frame, we put Kinect v2s while
robots usually have embarked cameras.
There are no special requests, they are allowed
to talk freely for about 30 minutes while eating and
drinking. Figure 2 shows one frame of the dataset.
4 EATING AND DRINKING
RECOGNITION IN A GROUP
In this section, we explain eating and drinking recog-
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
528
nition of a group based on joint positions, head direc-
tions, and their integration. The joint positions and
head directions of each person are obtained by the
Kinect v2s, as described in (Clark et al., 2015).
4.1 Eating and Drinking Recognition
based on Joint Positions and Head
Directions
As may be observed from Figure 2, we can only see
the joints of the upper body. Even in such a situation,
Kinect v2 can occasionally record 25 joint positions;
however, those of the lower body could be inaccurate.
Accordingly, we only use the 15 joint positions of the
upper body (see Figure 3). The positions we used are
a value of x-axis u and a value of y-axis v in a 2D
image. The input signal of joint positions X
s
is:
X
s
= {x
0
s
, ··· , x
t
s
, ··· , x
T
s
} (1)
x
t
s
= {u
t
0
, v
t
0
, ··· , u
t
j
, v
t
j
, ··· , u
t
J
, v
t
J
} (2)
where x
t
s
is the input signal at frame t(= 0, · · · , T),
and j denotes the label of joints (j = 0, ··· , J). J = 15
as mentioned above. x
t
s
is 30 dimensions.
The signal is input to the architecture of our
model. Figure 4 illustrates this architecture, includ-
ing the LSTM block. It is clear from Figure 4 that the
architecture is simply constructed of three layers; that
is, the first fully connected layer, the LSTM block,
and the second fully connected layer. Hereafter, the
Figure 3: 25 joint positions that can be recorded by Kinect
v2. Blue circles denote the upper body’s joints.
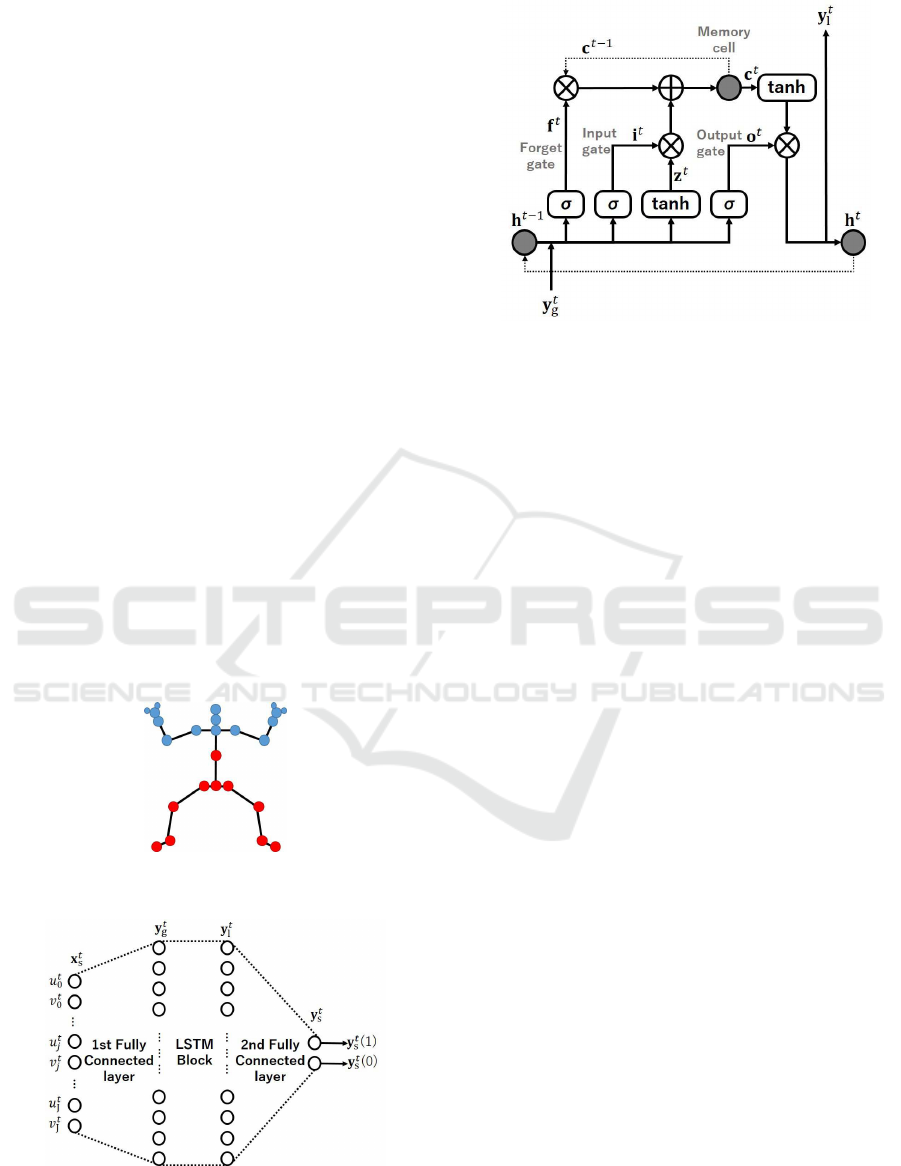
Figure 4: Our architecture, including LSTM block (please
see also Figure 5). This is an example in the case that the
input data is x
t
s
. Hereafter, the architecture will be referred
to as the “LSTM Arch”.
Figure 5: LSTM block with a single cell.
architecture will be referred to as the “LSTM Arch.”
First, x
t
s
passes through the first fully connected layer.
y
t
g
is then calculated as follows:
y
t
g
= W
xg
x
t
s
+ b
t
g
(3)
where W
xg
denotes the connection weights from the
input layer to the LSTM block, and b
t
g
is a bias vector.
LSTM architecture was proposed by (Hochreiter
and Schmidhuber, 1997) to solve vanishing gradient
and error blowing up problems. Figure 5 illustrates
an LSTM block with a single cell. It contains one
self-connected memory cell c and three multiplicative
units, that is, the input gate i, the forget gate f, and the
output gate o. LSTM stores and accesses the long-
range contextual information of a temporal sequence.
The output of LSTM block y
t
l
is calculated from y
t
g
us-
ing the activations of the memory cell and three gates:
z
t
= tanh(W
gz
y
t
g
+ W
hz
h
t−1
+ b
t
z
) (4)
i
t
= σ(W
gi
y
t
g
+ W
hi
h
t−1
+ b
t
i
) (5)
f
t
= σ(W
gf
y
t
g
+ W
hf
h
t−1
+ b
t
f
) (6)
c
t
= z
t
i
t
+ f
t
c
t−1
(7)
o
t
= σ(W
go
y
t
g
+ W
ho
h
t−1
+ b
t
o
) (8)
y
t
l
= h
t
= tanh(c
t
)o
t
(9)
where σ(·) is the sigmoid function, and all the ma-
trices W are the connection weights between the two
units.
Finally, the second fully connected layer of LSTM
Arch. calculates the final output:
y
t
s
= W
ls
y
t
l
+ b
t
s
(10)
y
t
s
(= {y
t
s
(1), y
t
s
(0)}) is the output value correspond-
ing to the two classes (eating/others or drink-
ing/others). Therefore, the predicted label a(= 0 or 1)
is:
a = arg max
x
y
t
s
(x) (11)
Eating and Drinking Recognition via Integrated Information of Head Directions and Joint Positions in a Group
529
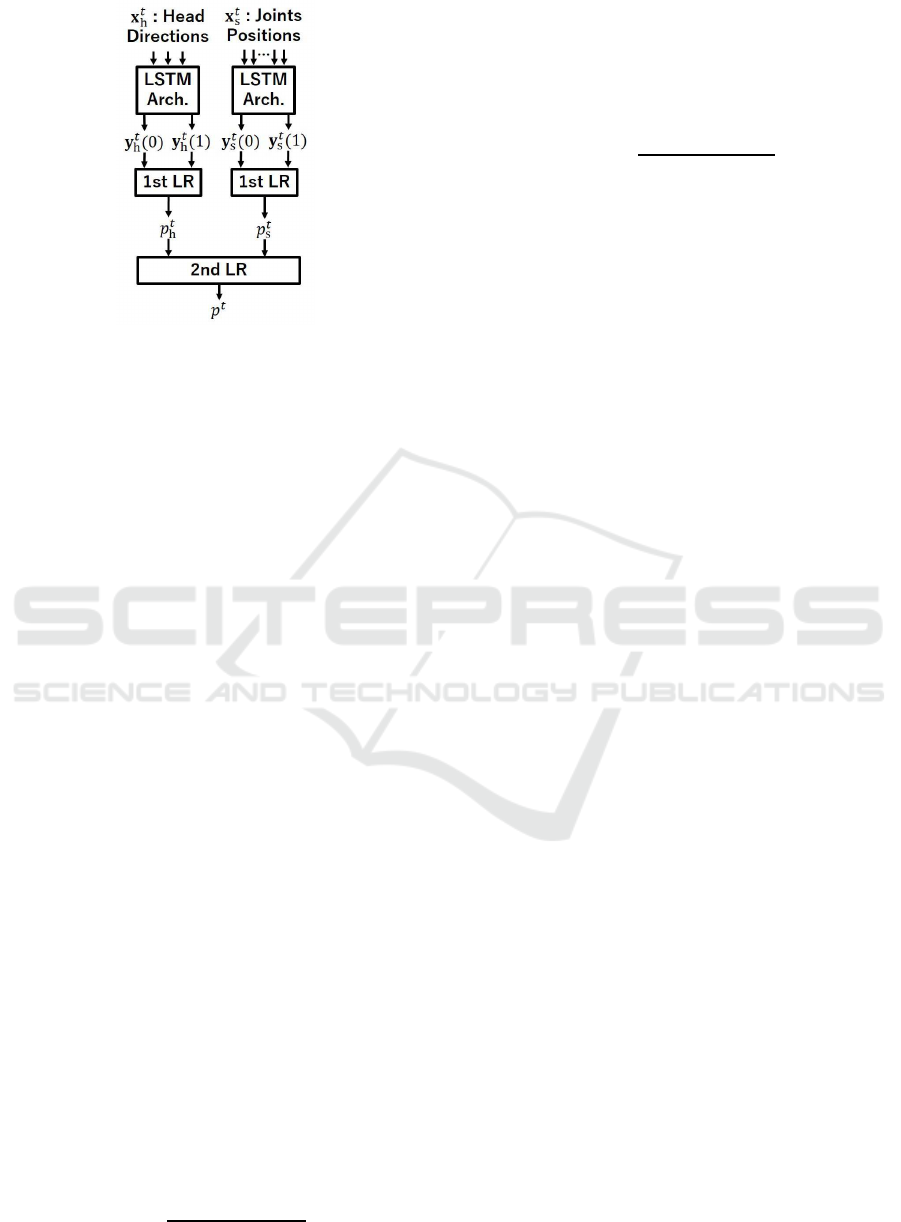
Figure 6: Integration of joint positions and head directions
by logistic regression.
In the training phase, the t-th training sample is
given as the pair of the input signal x
t
s
and the teaching
signal d
t
. For eating recognition, the teaching signal
d
t
= 1 when the subject is eating and 0 otherwise.
For drinking recognition, d
t
= 1 when the subject is
drinking and 0 otherwise.
We now turn our attention on to head directions.
There are three such directions: roll, pitch, and yaw.
The input signal of head directions X
h
is:
X
h
= {x
0
h
, ··· , x
t
h
, ··· , x
T
h
} (12)
x
t
h
= {x
0
h
, x
1
h
, x
2
h
} (13)
where x
t
h
is the input signal at frame t, and x
0
h
, x
1
h
, x
2
h
denote roll, pitch, and yaw (0 ≤ {x
0
h
, x
1
h
, x
2
h
} < 360)
respectively. x
t
h
is 3 dimensions.
To calculate the predicted label a, we simply re-
place x
t
s
with x
t
h
in Equation (3). We then get y
t
h
(=
{y
t
h
(1), y
t
h
(0)}), as in Equation (10).
4.2 Eating and Drinking Recognition
based on Integration of Joint
Positions and Head Directions
It is conceivable that recognition accuracy can be im-
proved by integrating joint positions and head direc-
tions. However, since they have different properties,
we should not simply concatenate x
t
s
with x
t
h
. Our in-
tegration method is described in Figure 6. We first
normalize the output values of LSTM Arch. with
LR because the output values are not probability val-
ues, but simply results of multiplications and addi-
tions through the architecture. The output values are
converted to the values between 0 and 1 with the fol-
lowing LR:
p
t
s
=
1
1+ exp{−α
tr
Y
t
s
}
(14)
where (Y
t
s
)
tr
= (1, y
t
s
(1), y
t
s
(0)), and α
tr
=
(α
0
, α
1
, α
2
) are LR coefficients. To normalize
y
t
h
, we use (Y
t
h
)
tr
= (1, y
t
h
(1), y
t
h
(0)) to get p
t
h
.
Finally, we again use LR to normalize and inte-
grate p
t
s
and p
t
h
. The LR is as follows:
p
t
=
1
1+ exp{−α
tr
P
t
}
(15)
where (P
t
)
tr
= (1, p
t
s
, p
t
h
). The predicted label a is:
a =
(
1 (p
t
≥ 0.5)
0 (p
t
< 0.5)
(16)
5 EXPERIMENT
In the experiment, we compared joint positions, head
directions, and integration of both to verify the effec-
tiveness of head directions and the integration.
5.1 Dataset
As mentioned above, to conduct the experiment, we
constructed a dataset since there have been none suit-
able for our purposes.
5.1.1 Annotation
We briefed the four subjects to engage in about 30
minutes of conversation while eating and drinking.
There were no special requests for what they were to
talk about. They were recorded by Kinect v2s, with
their joint positions and head directions being ob-
tained by Kinect v2 SDK, as described in (Clark et al.,
2015). We discarded frames at which the Kinect v2s
could not capture certain joint positions or head direc-
tions. The number of remaining frames was 33,336,
each frame having X
s
and X
h
of the four subjects. All
frames were manually annotated with labels for eat-
ing, drinking, and others. The number of frames for
each label is shown in Table 1. i in Table 1 means the
label of subjects. Comparing eating and drinking, the
number of frames for the former was more than that of
the latter, as eating takes much longer than drinking.
We recognized eating and drinking separately for
each subject; accordingly, the annotations for eating,
drinking, or others were done respectively. For eating
recognition, the teaching signal d
t
= 1 when a subject
was eating, and d
t
= 0 when a subject was not eat-
ing. The same annotations were applied for drinking
recognition.
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
530
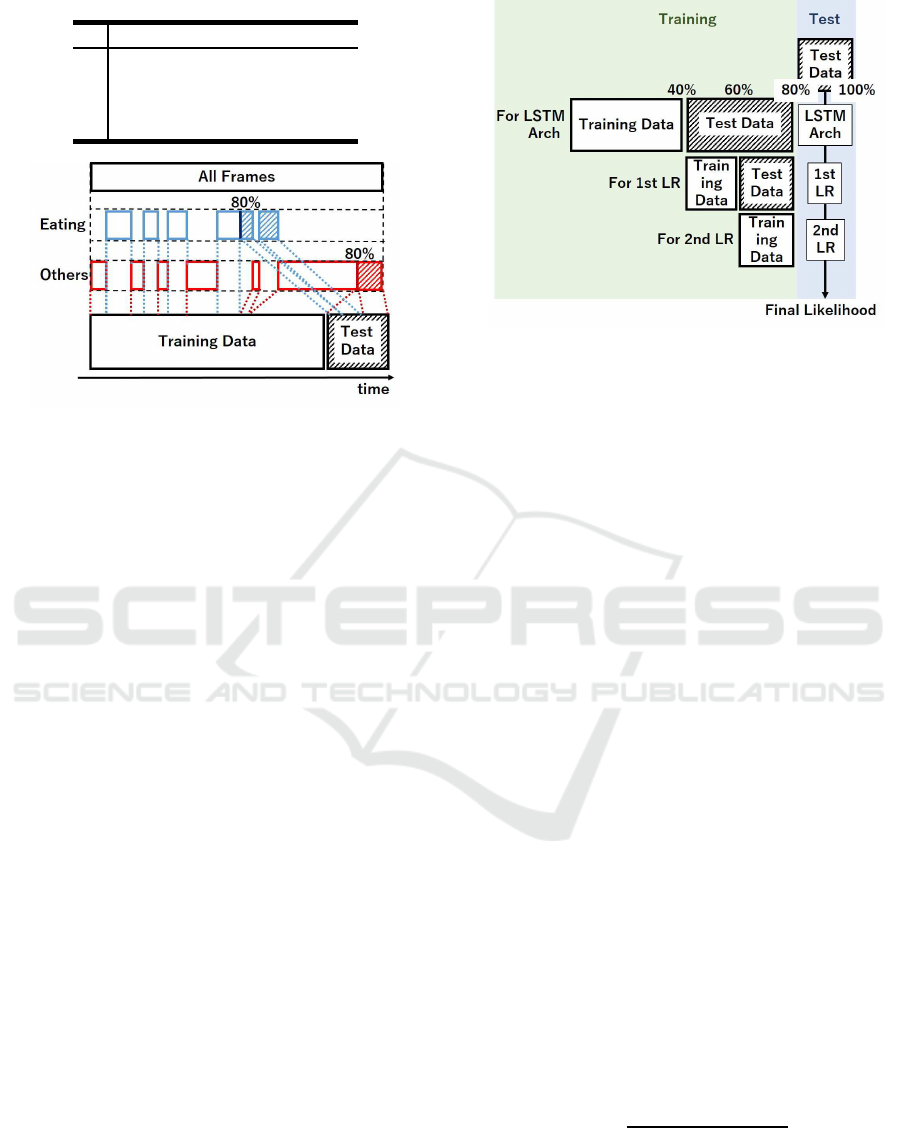
Table 1: The number of frames of each label.
i Eating Drinking Others
0 7644 2385 23307
1 11891 1030 20415
2
11812 1025 20499
3 10127 700 22509
Figure 7: Data division method when joint positions or head
directions were used. 80% of each class was selected for
training, while the remaining were used for the test while
sticking to the time sequence as much as possible.
5.1.2 Data Division
We have to divide all frames into training data and test
data. In this paper, we decided that 80% of all frames
were for training and the rest were for test. How-
ever, all 80% of frames from the beginning should
not have been used for training. Since there were
no special requests, eating and drinking frames were
concentrated until the middle. Therefore, using the
above method of division, the test data included no or
few eating/drinking frames. This was not adequate for
testing eating and drinking recognition capability. To
avoid this, we took 80% from each class for training
and 20% from each class for the test, while sticking
to the time sequence as much as possible. Figure 7
illustrates this strategy.
For eating and drinking recognition based on inte-
gration of joint positions and head directions, we have
to train three times: LSTM Arch, first LR, and second
LR as we explained in 4.2. 40% of frames were used
for LSTM Arch training, 20% for first LR training,
20% for second LR training, and 20% for the test. The
details are described in Figure 8. Figure 7 explains
how to divide the data for the recognition based on
joint positions and head directions, while Figure 8 ex-
plains for the recognition based on the integration of
them. All frames were also broadly divided. 0-80%
of all frames were for training, 0-40% were for LSTM
Arch training, and 40-80% were for LSTM test. By
using half of the results of LSTM Arch, first LR was
trained, while second LR was trained by using half of
the results of first LR. 80-100% of all frames would
Figure 8: Data division method when joint positions and
head directions are integrated.
show the final likelihood by passing through LSTM
Arch, first LR, and second LR.
5.2 Implementation
We implemented our architecture, LSTM Arch., by
using Chainer which is a standalone open source
framework for deep learning models (Tokui et al.,
2015). We used Adam (Kingma and Ba, 2014) for op-
timization. Before training, we performed standard-
ization. We computed the mean and standard devia-
tion from the training data, before standardizing the
training and testing data by centering and scaling.
5.3 Hyperparameters
LSTM Arch. has some hyperparameters. Those we
used are as follows. The number of units of the middle
layer was 512 for X
s
, and 32 for X
h
because there is
a difference between the number of the units of the
input layer of X
s
and that of X
h
(they are 30 and 3
respectively as described before). We conducted full
batch training (the batch size was equal to the training
data size) with 200 epochs.
5.4 Results
First, we will explain how we calculated the accuracy.
Usually, accuracy ac means a value using the follow-
ing formula:
ac =
TP+ TN
TP+ FP+ FN+ TN
(17)
where TP, FP, FN, TN denote true positive, false pos-
itive, false negative, and true negative respectively.
This evaluation index is inappropriate for us because
there is a leaning between two classes as mentioned
Eating and Drinking Recognition via Integrated Information of Head Directions and Joint Positions in a Group
531
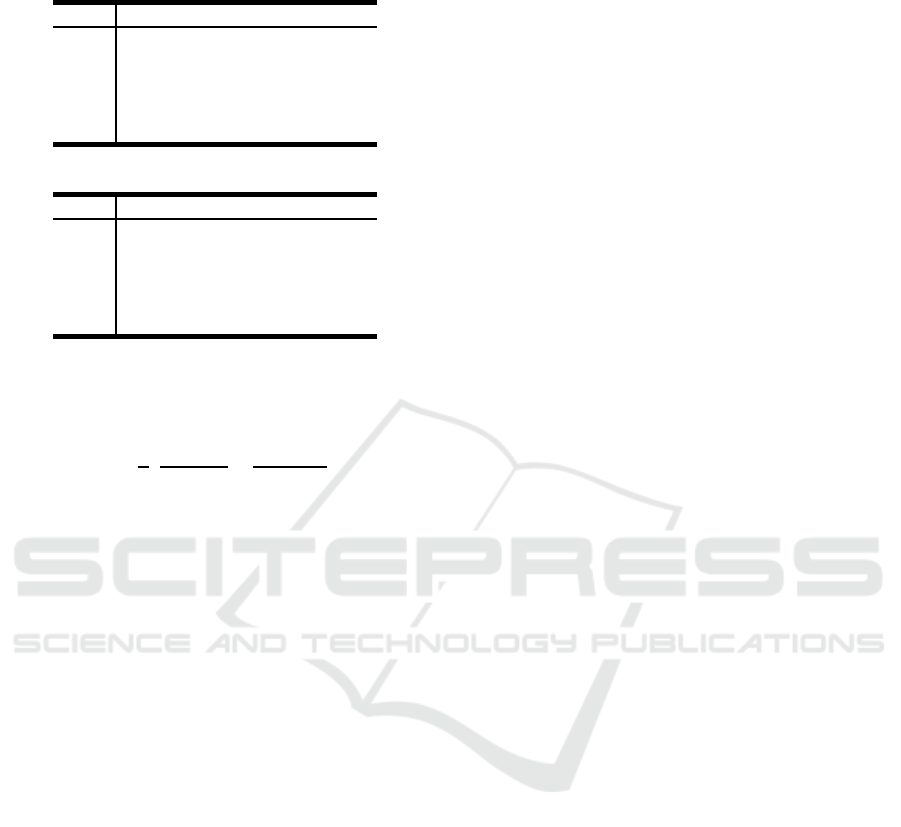
Table 2: Experimental results (%).
(a) Accuracy of eating recognition.
i X
s
X
h
X
s
+ X
h
0 59.0 76.0 76.0
1 57.0 82.4 81.6
2
80.4 78.6 81.9
3 56.5 57.0 55.9
Avg.
63.2 73.5 73.9
(b) Accuracy of drinking recognition.
i X
s
X
h
X
s
+ X
h
0 59.1 50.0 48.7
1
61.3 50.0 70.0
2 52.4 50.0 51.0
3
51.1 50.0 56.3
Avg. 56.0 50.0 56.5
in 5.1.1. To evaluate class 1 (eating or drinking) and
0 fairly, we also should not use precision and recall.
Therefore, we used the following evaluation index ev:
ev =
1
2
(
TP
TP+ FP
+
TN
FN+ TN
) (18)
We refer to ev simply as accuracy in this paper. Ac-
curacies calculated by the formula (18) are described
in Table 2. i is the label of subjects. Their sitting po-
sitions are illustrated in Figure 1. We will discuss the
result in the next section.
5.5 Discussion
We will investigate the accuracy of eating recognition
shown in Table 2 (a). First, we consider the accuracy
of each subject. When Eating, the subject with i = 3
had a very low accuracy. The subjects with i = 0, 1, 3
had a better accuracy regarding their head directions
X
h
rather than joint positions X
s
, specially when i = 0
and i = 1. For instance, the subject with i = 0 had 17
points higher when compared with its joint positions,
while the subject with i = 1 had 25.4 points higher
with the same comparison. However, i = 2 had a bet-
ter accuracy when using its joint positions, although
the values remained relatively close. The subjects
with i = 0, 2 had their maximum value when using
the integration method. For i = 1, 3, however, their
maximum value was achieved when using their head
directions. The reason is that the accuracies of joint
positions are very low in their case. Next, we consider
the average of accuracies of all subjects. On average,
we achieved the best accuracy when using the inte-
gration method. This result shows that the integration
of joint positions and head directions is effective for
eating recognition.
We discuss drinking recognition shown in Table
2 (b). First we discuss the accuracy of each subject.
The accuracy of each subject was quite low except
for the subject i = 1, because the number of frames
of drinking was quite smaller than that of eating, as
shown in Table 1. When we compared between joint
positions and head directions, we found that the ac-
curacies of the method using head directions were
lower (it couldn’t recognize at all). The joint positions
were more effective for drinking recognition since the
heads had lower movement when they were drinking.
For subjects i = 0, 2, the accuracy was the highest
when using the joint positions, whereas for subjects
i = 1, 3, the accuracy was the highest when using the
integration method. The reason why the integration
was not so effective is that the accuracies of the head
directions would seem to be random, and they were
quite low. Second, we discuss the average accuracy
of all subjects. On average, we achieved the best ac-
curacy when using the integration method. This result
shows that the integration of joint positions and head
directions is also effective for drinking recognition.
For both eating and drinking recognitions, the
integration of joint positions and head directions
achieved the best accuracy on average. Since the
movement of each subject was different, there was
variability among the accuracy of each subject. In
our future work, we will present the method that con-
siders the differences between the subjects. On this
occasion, however, when we recognized the eating or
drinking for the subject with i = 0, we used only his
training data. In future, we will use data that does
not include the current subject being tested to achieve
eating and drinking recognition.
6 CONCLUSION
In this paper, we have proposed a new task: eating
and drinking recognition as applied to each customer
who come to restaurants or cafes in a group, and in-
teract each other such as having a conversation. We
use head directions to demonstrate that the integra-
tion of joint positions and head directions leads to the
highest recognition accuracy on average, using logis-
tic regression.
At present, our constructed dataset only has four
subjects. In future research, we should increase the
variety of the dataset in several aspects, such as the
number of subjects, sitting places, different subjects,
and so on. If the dataset is small, we must overcome
certain particularities of subjects, such as handedness.
In addition, we will consider the recognition of speak-
ing and performing multiclass classification.
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
532

Our goal is to make cyber serving staff determine
the appropriate times for waiting on tables. One of
the times is when a customer in a group finishes the
eating or drinking. We will predict the time by using
our proposed method in future work.
ACKNOWLEDGEMENTS
This work was partially supported by JST CREST
“Intelligent Information Processing Systems Creat-
ing Co-Experience Knowledge and Wisdom with
Human-Machine Harmonious Collaboration.”
REFERENCES
Amor, B. B., Su, J., and Srivastava, A. (2016). Action
recognition using rate-invariant analysis of skeletal
shape trajectories. IEEE transactions on pattern anal-
ysis and machine intelligence, 38(1):1–13.
Bishop, C. M. (2006). Pattern recognition and machine
learning. Springer.
Chua, J.-L., Chang, Y. C., Jaward, M. H., Parkkinen, J., and
Wong, K.-S. (2014). Vision-based hand grasping pos-
ture recognition in drinking activity. In International
Symposium on Intelligent Signal Processing and Com-
munication Systems, pages 185–190.
Clark, R. A., Pua, Y.-H., Oliveira, C. C., Bower, K. J., Thi-
larajah, S., McGaw, R., Hasanki, K., and Mentiplay,
B. F. (2015). Reliability and concurrent validity of the
microsoft xbox one kinect for assessment of stand-
ing balance and postural control. Gait & posture,
42(2):210–213.
Ding, W., Liu, K., Cheng, F., Shi, H., and Zhang, B. (2015).
Skeleton-based human action recognition with profile
hidden markov models. In CCF Chinese Conference
on Computer Vision, pages 12–21.
Du, Y., Fu, Y., and Wang, L. (2016). Representation learn-
ing of temporal dynamics for skeleton-based action
recognition. IEEE Transactions on Image Processing,
25(7):3010–3022.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Iosifidis, A., Marami, E., Tefas, A., and Pitas, I. (2012).
Eating and drinking activity recognition based on dis-
criminant analysis of fuzzy distances and activity vol-
umes. In International Conference on Acoustics,
Speech and Signal Processing, pages 2201–2204.
Ishii, R., Otsuka, K., Kumano, S., and Yamato, J. (2016).
Prediction of who will be the next speaker and
when using gaze behavior in multiparty meetings.
ACM Transactions on Interactive Intelligent Systems,
6(1):4:1–4:31.
Kingma, D. and Ba, J. (2014). Adam: A method
for stochastic optimization. arXiv preprint
arXiv:1412.6980, pages 1–9.
Koppula, H. S. and Saxena, A. (2016). Anticipating human
activities using object affordances for reactive robotic
response. IEEE transactions on pattern analysis and
machine intelligence, 38(1):14–29.
Nayak, N. M., Zhu, Y., and Chowdhury, A. K. R. (2015).
Hierarchical graphical models for simultaneous track-
ing and recognition in wide-area scenes. IEEE Trans-
actions on Image Processing, 24(7):2025–2036.
Nihei, F., Nakano, Y. I., Hayashi, Y., Huang, H.-H., and
Okada, S. (2014). Predicting influential statements
in group discussions using speech and head motion
information. In International Conference on Multi-
modal Interaction, pages 136–143.
Ozasa, Y. and Ariki, Y. (2012). Object identification based
on color and object names using multimodal informa-
tion. The journal of the Institute of Image Electronics
Engineers : visual computing, devices and communi-
cations, 45(1):105–111.
Ozasa, Y., Nakano, M., Ariki, Y., and Iwahashi, N. (2015).
Discriminating unknown objects from known objects
using image and speech information. IEICE TRANS-
ACTIONS on Information and Systems, 98(3):704–
711.
Pieska, S., Luimula, M., Jauhiainen, J., and Spiz, V. (2013).
Social service robots in wellness and restaurant appli-
cations. Journal of Communication and Computer,
10(1):116–123.
Qing-Xiao, Y., Can, Y., Zhuang, F., and Yan-Zheng, Z.
(2010). Research of the localization of restaurant ser-
vice robot. International Journal of Advanced Robotic
Systems, 7(3):227–238.
Swears, E., Hoogs, A., Ji, Q., and Boyer, K. (2014). Com-
plex activity recognition using granger constrained
dbn (gcdbn) in sports and surveillance video. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 788–795.
Tokui, S., Oono, K., Hido, S., and Clayton, J. (2015).
Chainer: a next-generation open source framework for
deep learning. In Workshop on Machine Learning Sys-
tems at Neural Information Processing Systems.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3d skeletons
as points in a lie group. In IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 588–595.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2014). Learning
actionlet ensemble for 3d human action recognition.
IEEE transactions on pattern analysis and machine
intelligence, 36(5):914–927.
Eating and Drinking Recognition via Integrated Information of Head Directions and Joint Positions in a Group
533
