
Modeling Land Change using One or Two Time Points based
Calibration
A Comparison of Factors
María Teresa Camacho Olmedo
Departamento de Análisis Geográfico Regional y Geografía Física, Universidad de Granada, Spain
Keywords: Land Change Modeling, Calibration Step, Factors, Land Use and Cover Change.
Abstract: One of land change model parameters in calibration step relates to how changes over time and space are
considered in the model. A land change model can be calibrated with the state at one time point or with the
difference between two time points. The purpose is describing land use and cover (LUC) state patterns, i.e.
one time point calibration, and LUC transition patterns, i.e. two time points. For a case study in Spain we
obtained the collections of factors for two calibration periods at one time point (dates 2000 and 2006) and
the collections of factors for two calibration periods between two time points (periods 1990-2000 and 2000-
2006). Evidence likelihood is used to transform the explanatory variables into factors. The objective of this
paper is to compare these four collections of factors to show how the choice of reference maps influences
the factors and how these factors highlight the change patterns in two different calibration periods and in the
calibration of two models. As a following step the detailed results for the different factors and LUC
categories are analysed.
1 INTRODUCTION
The validity of the model and its outputs is one of
the most important challenges in land change
modeling (Paegelow and Camacho Olmedo, 2008;
Paegelow et al., 2014). Pontius and Malanson (2005)
demonstrate that output varies more as a result of the
choice of model parameters than as a result of the
choice of the model itself. One of these parameters
relates to how changes over time and space are
considered in the model, for the purpose of describing
LUC state patterns, i.e. one time point calibration, or
LUC transition patterns, i.e. two time points
calibration (Camacho Olmedo et al., 2013; Kolb et al.,
2013).
A model that is calibrated with the state at one
time point has certain advantages and disadvantages
compared to a model that is calibrated with the
difference between two time points. The first
approach does not explicitly consider the
distribution of land cover resulting from recent past
changes and instead assesses the total past changes
(Paegelow and Camacho Olmedo, 2005; Villa et al.,
2007; Conway and Wellen, 2011; Yu et al., 2011).
By contrast, the second approach evaluates the change
potential for each possible transition, where the future
potential of the space is split into specific transitions
across a finite number of LUC categories (Eastman et
al., 2005; Sangermano et al., 2010, Wang and
Mountrakis, 2011).
When calibrating the model, the patterns of change
(or change behaviour) are analyzed by a collection of
variables explaining LUC states and/or LUC
transitions. From these variables, a collection of
factors can be created with a large variety of methods
and analyses, as described in previous research into
land change modeling (Mas and Flamenco, 2011;
Pérez-Vega et al., 2012; Camacho Olmedo et al.,
2013, 2015; Kolb et al., 2013; Soares-Filho et al.,
2013; Mas et al., 2014; Osorio et al., 2015; Abuelaish
and Camacho Olmedo, 2016).
Factors can be created without references to LUC
locations, either states or transitions, using
transformation methods as natural logarithm, fuzzy,
etc. Alternatively, a collection of factors can be
made on the basis of information about LUC
locations. This is possible if methods such as
evidence likelihood are used to create the factors,
using the LUC states as the reference areas in one
time point calibration, and the LUC transitions in
two time points calibration. We chose this option
because land change models describing LUC states
or transitions must include LUC locations.
Olmedo, M.
Modeling Land Change using One or Two Time Points based Calibration - A Comparison of Factors.
DOI: 10.5220/0006384503410349
In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2017), pages 341-349
ISBN: 978-989-758-252-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
341
Our goals are therefore to obtain and compare
factors in order to show how the choice of LUC
reference maps influences the factors, how these
factors represent the change patterns in two different
calibration periods, how these factors represent the
change patterns in the two models calibrated in
different ways, and, finally the specific behavior of
the different LUC categories and factors.
We illustrate the procedure using the TerrSet
software (Clark Labs, 2016). For a case study in
Spain, we obtained the collections of factors for two
calibration periods at one time point (dates 2000 and
2006) and the collections of factors for two
calibration periods between two time points (periods
1990-2000 and 2000-2006). Evidence likelihood is
used to transform the explanatory variables into
factors. We then compared these four collections of
factors so as to gain a better understanding of change
patterns.
2 TEST AREA AND DATA SETS
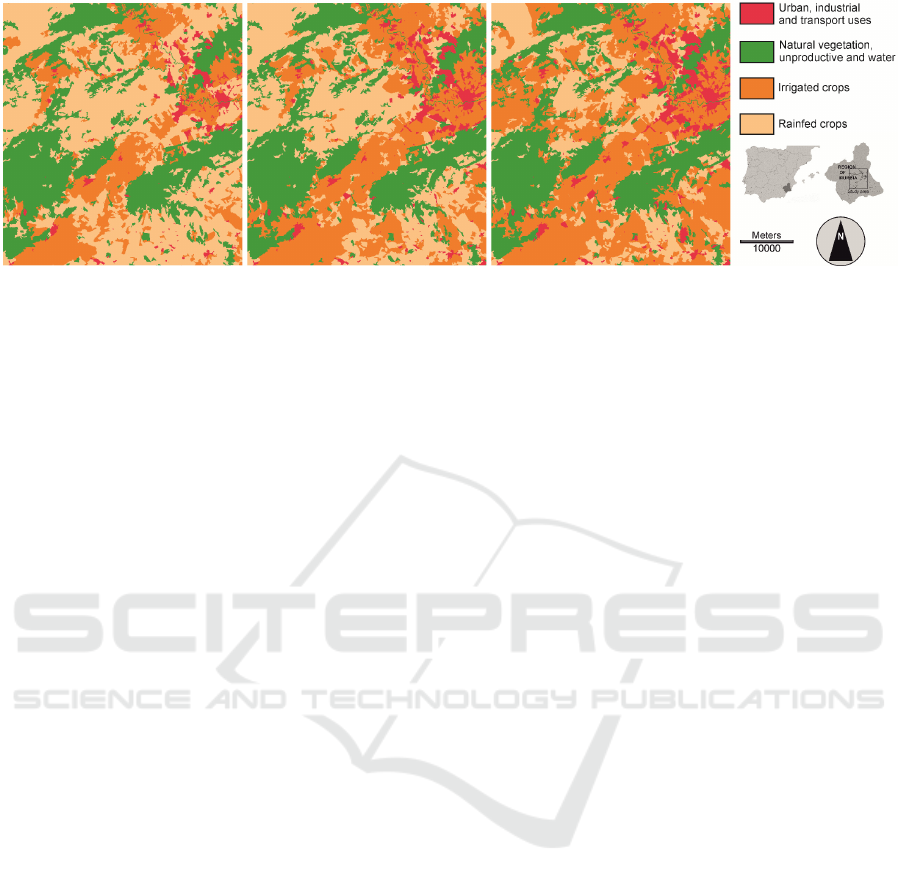
Figure 1 shows the specific study area, which covers
2,300 square kilometers in the province of Murcia
(southern Spain). The two types of calibration are
based on land use and cover data for the different
time periods and the related explanatory variables.
The maps of land use and cover (LUC) have four
categories from the Corine Land Cover
(CoORdination of INformation of the Environment,
Instituto Geográfico Nacional, Spain) dataset: urban,
industrial and transport uses; natural vegetation,
unproductive land and water; irrigated crops; rainfed
crops. In the rest of this article we refer to these
categories as urban, natural, irrigated and rainfed.
Corine maps at 1990 (t0), 2000 (t1) and 2006 (t2)
are used for model calibration. The explanatory
variables are topographic variables, protected areas,
territorial accessibility (roads diversity and quality),
distance to roads and distance to hydrographic
network (Gómez and Grindlay, 2008).
The study area has undergone profound
territorial and economic transformations in the
recent past. The most important change has been the
transition from rainfed crops to irrigated crops, due
to the development of water-related infrastructures
and the increase in the water supply (Gómez Espín
et al., 2011). Urban growth is a secondary change
driven by the development of transportation and
communication infrastructures.
3 METHODS
3.1 Obtaining Factors
Evidence likelihood is used to transform the
explanatory variables into factors. This procedure
analyzes the relative frequency of the different
categories of a given variable within the areas of
LUC states or LUC transitions. It is an efficient
means of introducing categorical variables into the
analysis, and it accepts continuous variables that
have been binned into categories.
The reference areas represented in binary maps
are therefore different for model calibration based on
one time point or two time points. For one time
point, the reference area is the most recent land use
category, i.e. the LUC state. For two time points, the
reference area is a map showing the changes that
have taken place between two points in time, i.e.
LUC transitions. This option aims to preserve the
nature of the state of the categories and the nature of
the changing categories. From now on, we refer to
areas corresponding to an LUC state or an LUC
transition as ‘reference maps’.
We obtained four reference maps for each LUC
category. In the first calibration period t0 – t1, the
reference map for one time point is a set of binary
categorical LUC maps (one for each category) at t1,
Figure1: LUC in 1990 (left), 2000 (middle) and 2006 (right) in the Murcia region in southern Spain. Source: Corine Lan
d
Cover.
GAMOLCS 2017 - International Workshop on Geomatic Approaches for Modelling Land Change Scenarios
342

and for two time points is a set of binary categorical
LUC maps (one for each transition) between t0 – t1.
In the second calibration period t1 – t2, the reference
map for one time point is every LUC state at t2 and
for two time points is every LUC transition between
t1 – t2 (Table 1). Figure 2 shows the reference maps
for irrigated crops as an example.
Table 1: Reference maps for evidence likelihood in one
time point and two time points based calibration in both
calibration periods.
First calibration
period
Second calibration
period
One time
point
2000 (
t1
) 2006 (
t2
)
LUC state LUC state
Two time
points
1990 (
t0
) – 2000 (
t1
) 2000 (
t1
) – 2006 (
t2
)
LUC transitions LUC transitions
In this study we discarded the transitions
affecting small surface areas, and grouped together
the transitions involving the same final category, a
common procedure in transitions modeling. It is
important to remember therefore that we are
comparing LUC states with almost all, but not all,
the LUC transitions. In the practical application only
the following transitions are modeled:
natural/irrigated/rainfed to urban; rainfed to natural;
natural/rainfed to irrigated; natural to rainfed. By far
the most important change in the area we studied is
the transition to irrigated crops, which is followed
some way behind by urban growth.
Using these reference maps we obtained four
collections of factors for each LUC category: for one
time point and for two time points, and both of these
for two calibration periods.
3.2 Assessment Methods
The Pearson correlation, a classical method for
assessing the congruence of quantitative data, was
used for comparing factors. Instead of looking for a
causality relationship between pairs of data, the
Pearson correlation tries to establish whether there is
a relationship between them. Values range from -1
to +1. High positive/negative Pearson values
indicate a direct/indirect relationship between two
data. Low positive/negative values indicate a lack of
relationship.
The Pearson correlation was calculated between
all pairs of factors for the one and two time points
based models and for the two calibration periods.
Factors are quantitative data from 0.0 to 1.0. The
higher the Pearson coefficient, the stronger the
correlation of factors. We consider values of over
0.8 to be very strong correlations.
4 RESULTS AND DISCUSSION
4.1 Collection of Factors
For one time point and for two time points, and for
each of the two calibration periods, the collections of
factors were obtained for each LUC category. As an
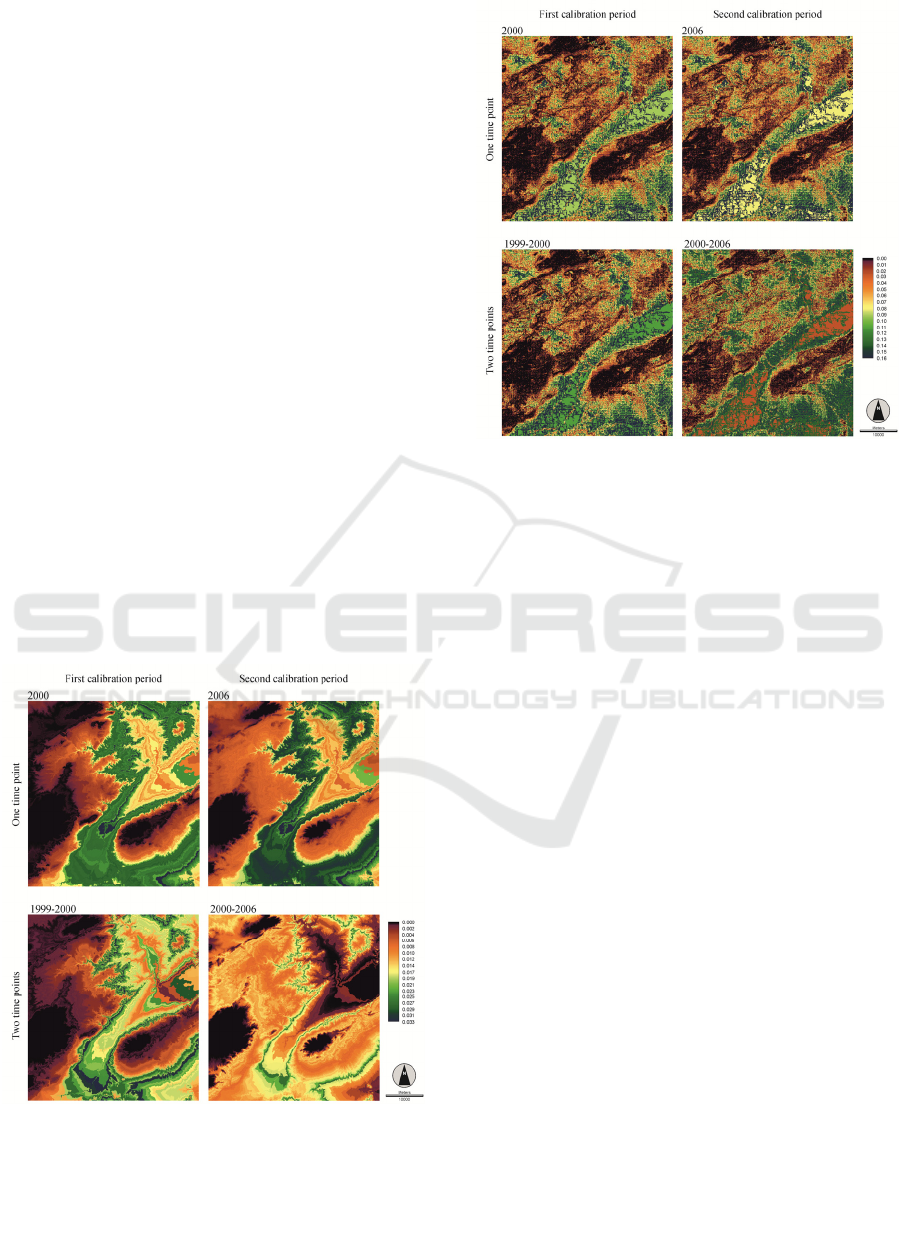
example, Figures 3 and 4 show the collection of
factors derived from the elevation variable and from
the slope variable in the reference maps for irrigated
crops.
4.2 Comparison of Four Collections of
Factors
In Figure 5, the Pearson correlation values for every
pair of factors (each square corresponds to one
comparison) is showed. Each cross tabulation matrix
is composed of one column per factor grouped by
LUC category (above) or per LUC category grouped
by factors (below) and by four rows: One time point
based model (first and second calibration period),
Two time points based model (first and second
calibration period), First calibration period (one and
two time points based model), Second calibration
period (one and two time points based model).
In Figure 5 (above), the collections of factors for
the urban category are all very similar. This means
Figure 2: Reference maps for evidence likelihood of the
LUC state of irrigated crops in 2000 and in 2006 (above)
and of the LUC transition to irrigated crops over the
periods 1990-2000 and 2000-2006 (below).
Modeling Land Change using One or Two Time Points based Calibration - A Comparison of Factors
343
that transitions patterns to this category are very
close to the state pattern for this category in both
calibration periods. The only exceptions are the
elevation and aspect factors. As an example, if we
focus on the Pearson correlation values for elevation
factors related to the urban category, we can see that
for 2000 and 2006 the situations are almost identical
(first row); the transitions between 1990-2000 and
2000-2006 are not so close (second row); the state in
2000 is very similar to the transitions over the period
1990-2000 (third row); and the state in 2006 is less
similar to the transitions that took place over the
period 2000-2006 (fourth row).
The factors for the natural vegetation,
unproductive and water category and the factors for
irrigated crops vary more sharply: transition patterns
in the first calibration period are not similar to those
in the second. Transitions are not very close to the
state pattern in either period. With respect to
irrigated crops, in the second calibration period the
transitions patterns are quite different from the state
pattern. This is due to elevation, distance to a main
irrigation channel and distance to a network of
ditches. Finally, for the collection of factors for
rainfed crops, a high dissimilarity is present in
transition patterns for both calibration periods and
with respect to the state pattern, particularly in the
first calibration period. However, it is also important
to emphasize that the state patterns are stable for all
categories (first row in Figure 5, above, one time
point based model).
In brief, if we compare the two calibration
methods, there is a medium to high linear
relationship between LUC transitions and LUC
states, which is higher in the first calibration period
in all the categories except for one. Looking at each
category, the urban patterns are very stable while at
the opposite extreme, the patterns for rainfed crops
show high variation. The situation also varies a great
deal in the natural category and in irrigated crops:
the transition patterns are not very stable and are not
very similar to the state pattern.
In Figure 5 (below), the Pearson values are
grouped by factors. Only factors common to at least
two LUC categories are shown. A quick overview
confirms that the state patterns are stable for all
categories (first row, one time point based model).
Aspect is the factor with the highest values in both
calibration periods and both models, followed by
distance to secondary road, except in the rainfed
crops category. Elevation and aspect seem to be the
most sensitive factors. They show widely varying
behavior, with high, medium and low Pearson
values, which means that transition patterns and
state patterns are not regular with respect to these
variables. With regards to distance to main irrigation
channel, the transition patterns for irrigated crops are
not regular, although the most irregular are those for
Figure 3: Irrigated crops and elevation. Evidence
likelihood of the LUC state for irrigated crops in 2000 an
d
2006 derived from the elevation variable (above) and o
f
the LUC transition to irrigated crops over the periods
1990-2000 and 2000-2006 derived from the elevatio
n
variable (below).
Figure 4: Irrigated crops and slope. Evidence likelihood o
f
the LUC state for irrigated crops in 2000 and 2006 derive
d
from the slope variable (above) and of the LUC transitio
n
to irrigated crops over the periods 1990-2000 and 2000-
2006 derived from the slope variable (below).
GAMOLCS 2017 - International Workshop on Geomatic Approaches for Modelling Land Change Scenarios
344

rainfed crops. In brief, when looking at the different
factors, the homogeneity or heterogeneity of LUC
locations can lead to widely varying behavior.
Previous researchers observed a relationship
between environmental and accessibility factors and
the initial conditions in which LUC changes are
carried out (Lambin et al., 2001; Yu et al., 2011
Osorio et al., 2015).
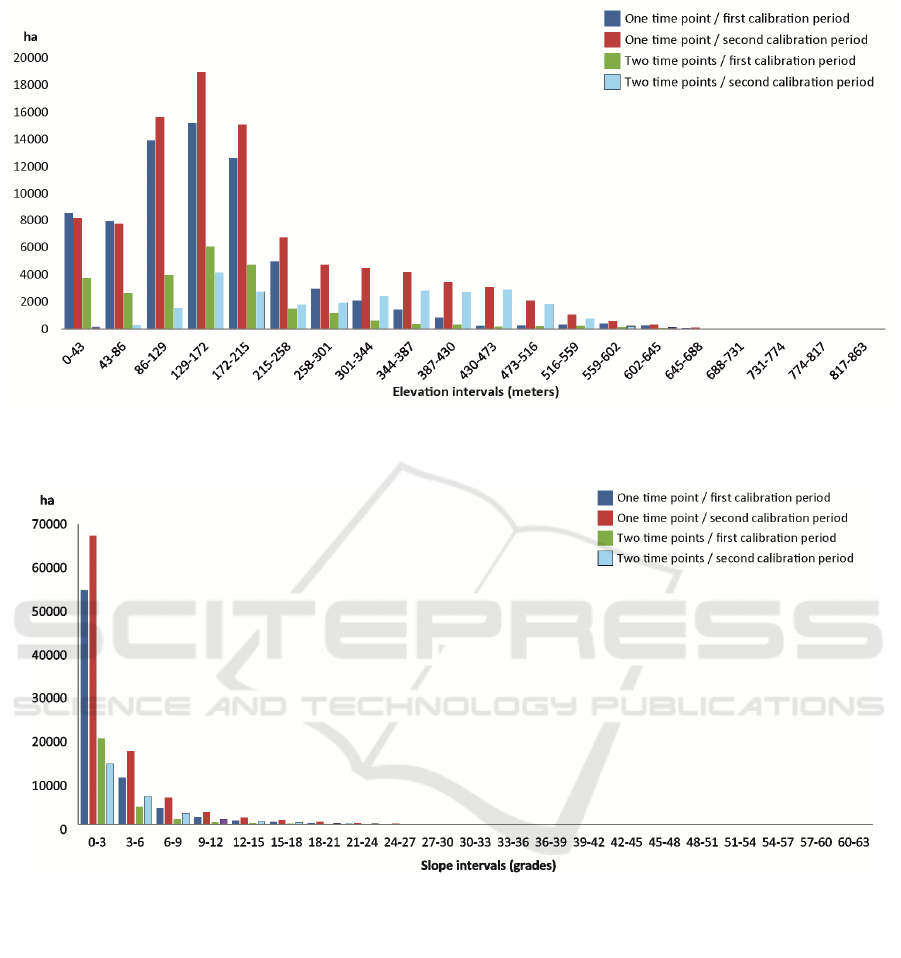
For a better understanding of these patterns, we
focused on the collection of factors for irrigated
crops. Figures 6 and 7 present the histograms (ha)
for the LUC state for irrigated crops in 2000 and
2006 and for the LUC transition to irrigated crops
over the periods 1990-2000 and 2000-2006, by
elevation intervals and by slope intervals.
If we compare these two variables, we can
conclude that irrigated crops behave in a more
homogenous manner with respect to slope (only
some slope intervals are affected) than to elevation,
which explains the different Pearson values
commented above. Figure 6 shows that irrigated
crops were located at lower elevations in the first
calibration period, 1990-2000, and that the new
irrigated fields planted from 2000 to 2006, went up
to higher elevations, in other words, transitions
occurred at different altitudes. However, we do not
know if this is a general dynamic or if it is due to the
particular behavior of one of the LUC origin
categories (natural or rainfed). We must remember
that, in this study, we grouped some transitions
(natural/irrigated/rainfed to urban; natural/rainfed to
irrigated) together. Although this is a common
procedure in modeling, it does not allow us to
distinguish between the categories that have been
grouped together.
Figures 6 and 7 show absolute surface area
values (ha), which means that comments must also
be relativized with respect to the surface areas of the
reference maps. We assume that an LUC state or an
LUC transition with a larger area offers more robust
statistical representativeness. This means that the
factors that are created and their patterns should be
more stable. On the other hand, if the surface areas
of the reference maps of LUC states and of LUC
transitions are similar in size, the patterns should
also be more similar, because the LUC transitions
are included in the LUC state for the same
calibration period.
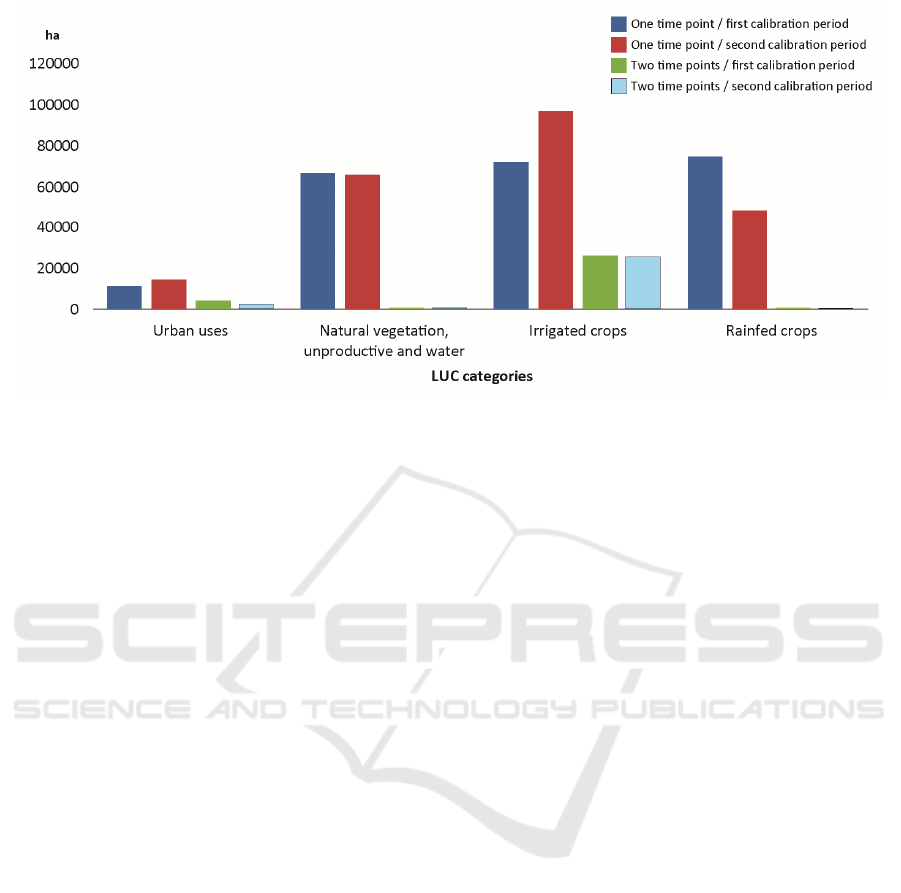
Figure 8 presents the surface area (ha) for the
reference maps for all the LUC categories. As
commented earlier, we decided not to model very
small transitions or grouped heterogeneous
transitions. For the natural category and the rainfed
category, the surface areas of LUC states and LUC
Figure 5: Representation of Pearson correlation values for each pair of factors (each square corresponds to one comparison).
Each cross tabulation matrix is composed of one column per factor grouped by LUC (above) and per LUC grouped by
factors (below), and of four rows: One time point based model (first and second calibration period), two time points base
d
model (first and second calibration period), first calibration period (one and two time points based model), secon
d
calibration period (one and two time points based model). Factors legend (above): elevation (a), slope (b), aspect (c),
accessibility to main road (d), accessibility to human settlements (e), distance to secondary road (f), distance to mai
n
irrigation channel (g), distance to secondary irrigation channels (h), distance to network of rivers and streams (i), distance to
network of ditches (j), distance to water catchments (k). LUC legend (below): urban (U), natural (N), irrigated (I) rainfed (R).
Modeling Land Change using One or Two Time Points based Calibration - A Comparison of Factors
345
transitions vary greatly and may therefore show a
different pattern in the extracted factors. Besides,
LUC transitions to these categories in both
calibration periods affect only a small proportion of
the study area (<900 ha in the natural category, <400
ha in the rainfed crops category). In fact, LUC
transitions to the natural category correspond to less
than 2% of the natural LUC state, and LUC
transitions to the rainfed category correspond to less
than 1% of the rainfed LUC state. Therefore,
modeling LUC transitions may not be statistically
representative.
For irrigated crops, even if the surface areas of
LUC state and LUC transitions vary greatly, they
still correspond to 26,386 and 26,026 ha or 36% and
27% of the LUC state for irrigated crops in the two
calibration periods respectively. The total surface
area covered by urban areas is lower than the other
categories, but LUC transitions, with 4,513 and
2,969 ha in the two calibration periods, correspond
to 38% and 20% of urban LUC states respectively.
This means that modeling LUC transitions for these
categories can be statistically representative.
Valuable additional information can be obtained
by assessing the coincidence between the reference
Figure 6: Histograms (ha) for the LUC state for irrigated crops in 2000 and 2006 and for the LUC transition to irrigate
d
crops over the periods 1990-2000 and 2000-2006, by elevation intervals.
Figure 7: Histograms (ha) for the LUC state for irrigated crops in 2000 and 2006 and for the LUC transition to irrigate
d
crops over the periods 1990-2000 and 2000-2006, by slope intervals.
GAMOLCS 2017 - International Workshop on Geomatic Approaches for Modelling Land Change Scenarios
346
maps for the two calibration periods. As commented
in section 3.1., there is no coincidence between the
areas of the reference maps in the two time points
based model. In the one time point based model, the
coincidence between the area in the first calibration
period with respect to the area in the second
calibration period is 100% for urban areas, 97.71%
for the natural category, 97.51% for irrigated crops
and 63.86% for rainfed crops. However, the
coincidence between the areas in the second
calibration period with respect to the area in the first
calibration period is 79.97% for urban areas, 98.66%
for the natural category, 73.20% for irrigated crops
and 98.84% for rainfed crops.
This study can be continued by comparing and
assessing the soft-classified maps obtained by the
different calibration based models. Camacho
Olmedo et al. (2013) compared suitability maps (one
time point based model) and transition potential
maps (two time point based model) in one
calibration period. The applied assessment method
showed moderate-to-high correlation values between
them, inchange-prone areas, for all categories except
one. They assessed the predictive ability of soft-
classified maps with respect to real maps, and
confirmed that a two time points based model
outperformed a one time point based model in the
case of modeling urban growth because the
transition potential map for urban growth captured
urban change more accurately than the suitability
map did, while the opposite was true for the other
categories.
Current research into land change models tends
to range from pattern-based models, which are
calibrated on the basis of trends observed in the past,
to models that try to simulate general processes of
change by integrating expert knowledge (NRC,
2013; Mas et al., 2014; Osorio et al., 2015).
5 CONCLUSIONS
A land change model can be calibrated with the state
at one time point or with the difference between two
time points. These approaches therefore involve
modeling either LUC states or LUC transitions. The
first approach implicitly includes all past changes,
while the second considers past changes that
occurred during a recent period. The calibration of
land change models by one time point or two time
points, i.e. states or transitions, gives different
results. The choice of reference maps affects the
similarity or dissimilarity of factors.
Factors obtained from the LUC state (one time
point based model) in two calibration periods show a
high linear relationship. The state pattern is therefore
stable. The one time point based calibration model
could therefore be accurate at modeling categories in
which transitions affect a proportionally small area
and also when patterns of change vary in recent
periods. This “total past trend” based calibration is
more likely to capture historic patterns of change
and simulations over longer time.
Factors obtained from LUC transitions (two time
points based model) in two calibration periods show
highly varied values, from non-linear to highly
linear relationships between them. Modeling LUC
transitions can be statistically representative when
they correspond to a proportionally larger area and
when patterns of change are maintained over two
Figure 8: Surface area (ha) of reference maps for the different LUC categories.
Modeling Land Change using One or Two Time Points based Calibration - A Comparison of Factors
347

successive periods. This “two past trend” based
calibration is more likely to capture recent patterns
of change and simulations over shorter periods.
A multi-temporal approach, integrating data
about more than two training dates, could resolve
potential errors resulting from only considering two
past dates or by considering the total past, and would
be more appropriate for creating forecasting
scenarios. However, a choice must be made between
using states or transitional data in the calibration of
the models. Depending on multiple parameters,
including form and intensity of dynamics, the two
approaches may be complementary.
ACKNOWLEDGEMENTS
This work was supported by the BIA2013-43462-P
project funded by the Spanish Ministry of Economy
and Competitiveness and by the Regional European
Fund FEDER.
REFERENCES
Abuelaish, B., Camacho Olmedo, M.T., 2016. Scenario of
land use and land cover change in the Gaza Strip using
remote sensing and GIS models. Arab J Geosci (2016)
9:274.
Camacho Olmedo M.T., Paegelow M., Mas, J.F., 2013.
Interest in intermediate soft-classified maps in land
change model validation: suitability versus transition
potential. International Journal of Geographical
Information Science 27 (12): 2343–2361.
Camacho Olmedo, M.T., Pontius R.G. Jr., Paegelow M.,
Mas, J.F., 2015. Comparison of simulation models in
terms of quantity and allocation of land change.
Environmental Modelling & Software, 69 (2015):
214–221.
Clark Labs, 2016. Available from: http://www.clarklabs.org/.
Conway T.M., Wellen, C.C., 2011. Not developed yet?
Alternative ways to include locations without changes
in land use change models. International Journal of
Geographical Information Science, 25 (10): 1613–
1631.
NRC, 2013. Advancing Land Change Modeling:
Opportunities and Research Requirements. Committee
on Needs and Research Requirements for Land
Change, Modeling; Geographical Sciences
Committee; Board on Earth Sciences, and Resources;
Division on Earth and Life Studies, National Research
Council, Washington, USA.
Eastman, J.R., Solorzano, L.A., Van Fossen M.E., 2005.
Transition potential modeling for land cover change.
In: Maguire, D.J., Batty, M., Goodchild, M.F. (eds.)
GIS, spatial analysis, and modeling. Redland, CA:
ESRI, pp 357–385.
Gómez Espín, J.M., López Fernández, J.A., Montaner
Salas, M.E., (eds.) 2011. Modernización de regadíos:
Sostenibilidad social y económica. La singularidad de
los regadíos del Trasvase Tajo-Segura. Colección
Usos del agua en el territorio. Universidad de Murcia.
Spain.
Gómez, J.L., Grindlay, A. (eds.) 2008. Agua, Ingeniería y
Territorio: La transformación de la cuenca del río
Segura por la IngenieríaHidráulica. Ministerio de
Medio Ambiente, Medio Rural y Marino.
Confederación Hidrográfica del Segura. Spain.
Kolb, M., Mas, J.F., Galicia, L., 2013. Evaluating drivers
of land-use change and transition potential models in a
complex lanscape in Southern Mexico. International
Journal of Geographical Information Science
27(9):1804–1827.
Lambin, E. et al., 2001. The causes of land-use and land
cover change: moving beyond the myths. Global
Environmental Change 11(4):261–269.
Mas, J.F., Flamenco-Sandoval, A., 2011. Modelación de
los cambios de coberturas/uso del suelo en una región
tropical de México. GeoTrópico, 5(1):1–24.
Mas, J.F., Kolb, M, Paegelow, M., Camacho Olmedo,
M.T., Houet, T., 2014. Inductive pattern-based land
use / cover change models: A comparison of four
software packages. Environmental Modelling &
Software, 51(2014): 94–111.
Osorio, L.P., Mas, J.F., Guerra, F., Maass, M., 2015.
Análisis y modelación de los procesos de
deforestación: un caso de estudio en la cuenca del río
Coyuquilla, Guerrero, México. Investigaciones
Geográficas, Boletín, núm. 88:60–74.
Paegelow, M., Camacho Olmedo, M.T., 2005. Possibilities
and limits of prospective GIS land cover modeling – a
compared case study: Garrotxes (France) and Alta
Alpujarra Granadina (Spain). International Journal of
Geographical Information Science, 19 (6):697–722.
Paegelow M., Camacho Olmedo, M.T., (eds.) 2008.
Modelling environmental dynamics. Advances in
geomatics solutions. Berlin: Springer-Verlag.
Paegelow M., Camacho Olmedo, M.T., Mas, J.F., Houet.
T., 2014. Benchmarking of LUCC modelling tools by
various validation techniques and error analysis.
Cybergeo, document 701, mis en ligne le 22 décembre
2014.
Pérez-Vega, A., Mas, J.F., Ligmann-Zielinska, A., 2012.
Comparing two approaches to land use/cover change
modeling and their implications for the assessment of
biodiversity loss in a deciduous tropical forest.
Environmental Modelling & Software 29 (1):11–23.
Pontius, R.G.,Jr., Malanson, J., 2005. Comparison of the
structure and accuracy of two land change models.
International Journal of Geographical Information
Science 19:243–265.
Sangermano, F., Eastman, J.R., Zhu, H. 2010. Similarity
weighted instance based learning for the generation of
transition potentials in land change modeling.
Transactions in GIS 14(5):569–580.
Soares-Filho, B., Rodrigues, H., Follador, M., 2013. A
hybrid analytical-heuristic method for calibrating land-
GAMOLCS 2017 - International Workshop on Geomatic Approaches for Modelling Land Change Scenarios
348

use change models. Environmental Modelling &
Software 43(2013):80–87.
Villa, N., et al., 2007. Various approaches for predicting
land cover in Mediterranean mountains.
Communication in Statistics 36(1):73–86.
Wang, J., Mountrakis, G., 2011. Developing a multi-
network urbanization model: a case study of urban
growth in Denver, Colorado. International Journal of
Geographical Information Science 25(2):229–253.
Yu, J., et al., 2011. Cellular automata-based spatial multi-
criteria land suitability simulation for irrigated
agriculture. International Journal of Geographical
Information Science 25(1):131–148.
Modeling Land Change using One or Two Time Points based Calibration - A Comparison of Factors
349
