
Hierarchical Petri Net Simulator: Simulation, Design Validation, and
Model Checking Tool for Hierarchical Place/Transition Petri Nets
Yojiro Harie and Katsumi Wasaki
Interdisciplinary Graduate School of Science and Technology, Shinshu University,
4-17-1, Wakasato, Nagano, Nagano, Japan
Keywords:
Petri Nets, HiPS, Hierarchical Modeling, Property Analysis, Event based Verification.
Abstract:
This paper introduces the Hierarchical Petri net Simulator (HiPS), a Petri net design tool implemented using
C# and C++, the .NET Framework, and an interprocess communication channel. HiPS supports hierarchical
modeling and can analyze the dynamic and structural properties of a Petri net by generating state spaces. The
state space generation engine in HiPS provides a memory-saving technique and high-speed execution. We
have devised an Extended Coverability Graph (ECG) mechanism for liveness and persistence properties to
accurately maintain transition information. In this paper, we extend HiPS to include a liveness analyzer that
utilizes the ECG mechanism and an on-the-fly model checker for event-based systems. We also describe an
algorithm that generates state spaces by multi-threading. Furthermore, we propose priority firing estimation
with on-the-fly model checking for Linear Temporal Logic (LTL).
1 INTRODUCTION
The increasing implementation of embedded systems
in IT has led to communication complexity and com-
plex architectures. A Petri net is a graphical and math-
ematical modeling tool that can describe many sys-
tems, such as logic circuits, data communication, and
distributed cloud applications (Iakushkin et al., 2016).
The set of all possible system states is called the state
space. State space structures in Petri nets are pre-
sented in the form of reachability graphs. For com-
plex hierarchical models, large simulations have high
processor and memory requirements, and generating
state spaces to analyze system behavior can overtax
these resources. Thus, high efficiency throughput and
reasonable run times are important.
Model checking (Clarke et al., 2001), which can
be applied to eliminate bugs, is an automatic ver-
ification method that employs mathematical analy-
sis. However, with large complex system models, the
number of states can increase significantly. On-the-fly
execution has been proposed to increase the efficiency
of model verification by checking the model and gen-
erating the state space simultaneously.
This paper describes the Hierarchical Petri net
Simulator (HiPS) and extensions to HiPS. HiPS is a
Petri net design tool implemented in C# and C++,
the .NET Framework, and an interprocess commu-
nication (IPC) channel. HiPS can support hierarchi-
cal modeling and can analyze dynamic and structural
properties by generating state spaces.
Hierarchical Queuing Petri Net (HQPN) model-
ing tools are similar to HiPS (Falko Bause and Kem-
per, 1996). HiPS differs from HQPN tools depending
on whether the subpage module deals with the aspect
of the place. We focus on the temporal aspects and
consider two classes of Petri nets, that is, timed Petri
nets (TPNs) and stochastic Petri nets (SPNs) (Reisig,
1985). Colored Petri nets (CPNs) are a backward-
compatible extension of the concept of Petri nets be-
cause its tokens can hold data. CPN Tools (Wester-
gaard and Verbeek, 2016) is a modeling and analy-
sis tool for CPNs, and PIPE 2 (Dingle and Knotten-
belt, 2016), a platform independent Petri net editor,
is a modeling and simulation analysis tool for TPNs
and SPNs. In this paper, we do not consider CPNs;
however, HiPS2 has been developed and released for
modeling based on CPNs.
The state space generation engine embedded in
HiPS provides a memory-saving technique and high-
speed execution. The state space generation engine
employs parallel execution based on Intels Threading
Building Blocks (TBB), a widely used library for par-
allel task execution (Reinders, 2007). The engine was
configured according to the operating parameters of
each data structure, that is, hash table size and tree
356
Harie, Y. and Wasaki, K.
Hierarchical Petri Net Simulator: Simulation, Design Validation, and Model Checking Tool for Hierarchical Place/Transition Petri Nets.
DOI: 10.5220/0006463803560361
In Proceedings of the 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2017), pages 356-361
ISBN: 978-989-758-265-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
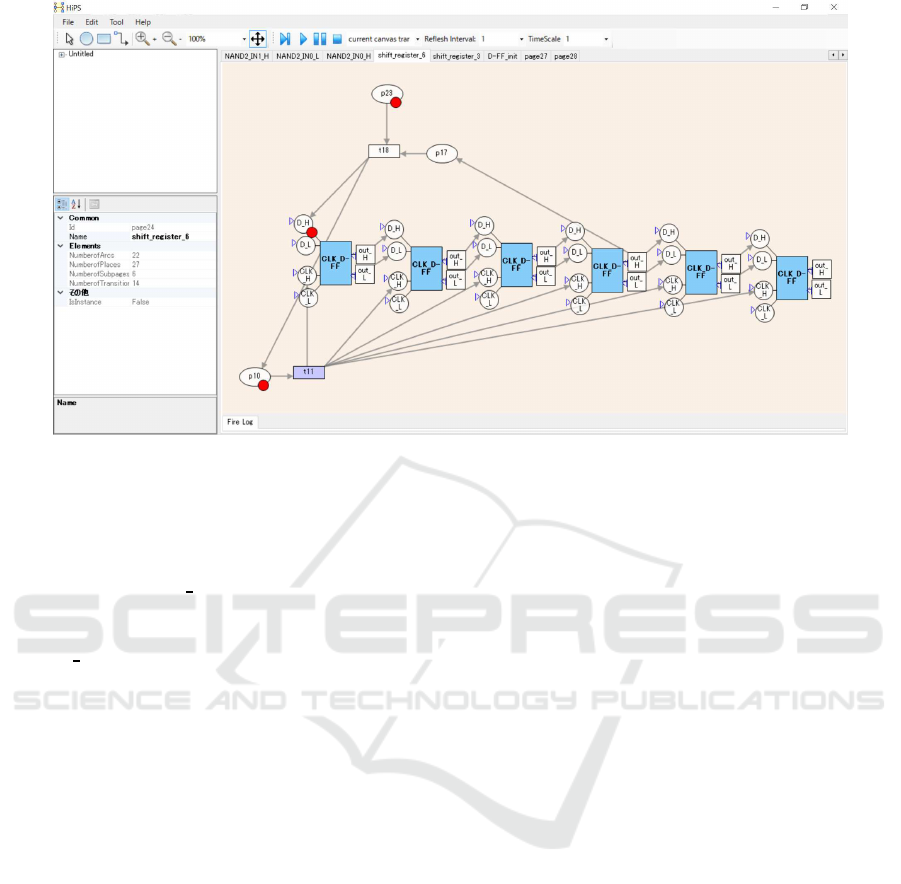
Figure 1: HiPS tool user interface (ellipses, small rectangles, plain arrows, and red circles represent places, transitions, arcs,
and tokens, respectively).
depth; thus, it provides a suitable container for the
structure of the model and the marking appearance.
To minimize memory space, we use special limited 4-
bit memory (i.e., 4BIT
INT). The size and structure
can be varied such that we can emphasize minimiz-
ing the use of another resource; for example, by using
the 4BIT
INT mode, we can emphasize memory effi-
ciency rather than execution speed.
Petri nets havetwo sets of properties, that is, struc-
tural and dynamic. Structural properties are related to
the structure of the net and dynamic properties de-
pend on the initial marking. Note that HiPS can an-
alyze both sets. We introduced Extended Coverabil-
ity Graphs (ECGs) for liveness and persistence prop-
erties to maintain accurate information about transi-
tions. The existing coverability graph generator can-
not incorporate firing sequences without maintaining
transition information. By introducing ECGs, we can
perform the required fairness analysis uncondition-
ally.
We have extended the HiPS tool to include a live-
ness analyzer to utilize the ECG mechanism and an
on-the-fly model checker for event-based systems. In
this paper, we describe an algorithm that generates
state spaces by multi-threading. Furthermore, we pro-
pose the concept of priority firing estimation with on-
the-fly model checking for Linear Temporal Logic
(LTL).
The remainder of this paper is organized as fol-
lows. Section 2 describes the HiPS tool environment
and concept. Section 3 defines state space and de-
scribes the achieved improvements. Petri net proper-
ties are discussed in Section 4, and model checking
for HiPS is described in Section 5. Conclusions and
suggestions for future work are given in Section 6.
2 HIPS DEVELOPMENT
HiPS has been designed to improve operability and
execution speed by introducing multi-threading into
a system that generates a state space. Figures 1 and
2 show an overview of the HiPS user interface and
a function diagram of the HiPS tools, respectively.
The architecture of the HiPS graphical user interface
(GUI) framework is organized around a Petri net de-
signer and the simulator. When implementing a ver-
ification environment, it is vital to simulate and ana-
lyze the properties and behaviors of the given system.
In addition to the shown functions in Figure 2, HiPS
can also analyze other properties (liveness, deadlock,
etc.) of a system model. It is important that the sys-
tem design such as the reactive system needs to run
continuously anytime without unexpected stopping,
that is, the system does not include deadlock. Prop-
erty analyzer is useful for detecting potential bugs.
Useful functions of the HiPS tool improve visually
the display results of structural analysis such as T-
invariant and the specification support function for
model checking (Harie and Wasaki, 2015).
A Petri net is a particular type of bipartite directed
graph consisting of two types of nodes (i.e., places
and transitions) (Murata, 1989). Arcs are either from
a place to a transition or from a transition to a place.
Hierarchical Petri Net Simulator: Simulation, Design Validation, and Model Checking Tool for Hierarchical Place/Transition Petri Nets
357
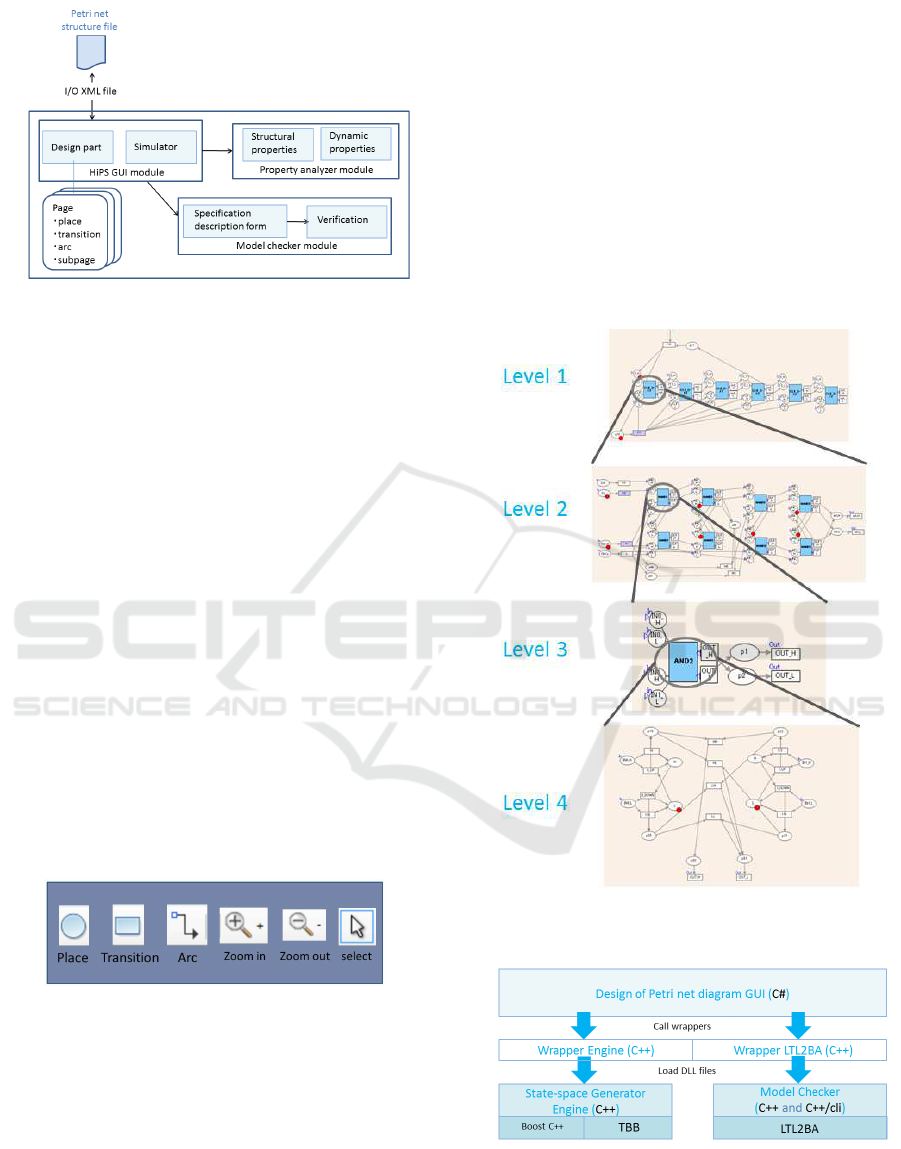
Figure 2: HiPS tool function diagram.
Petri net design can be performed intuitively to con-
nect components on the main screen, such as transi-
tions, places, and arcs. HiPS can observe the behav-
iors of the design model by simulating random walks
from the initial marking. The Petri net data struc-
ture in HiPS comprises several pages. The page in-
stance has many elements, for example, place, transi-
tion, arc, and subpage. The HiPS GUI uses the .NET
Framework, which has a container implemented in
C#.
The main HiPS window includes standard menu
panels to load/save files, edit models, call the Petri net
analyzer, and help users (Figure 1). The GUI buttons
to create models are shown in Figure 3. By clicking
on the buttons (e.g., arc, transition, and place), the
applications operation mode can be switched to edit
mode. After selecting these buttons, the user can add
a new responding element by clicking on the canvas.
After clicking the “Select” button, the user can select
elements on the canvas. A place is represented by an
empty ellipse. When positioning tokens, we edit the
place attribute information. Note that fireable transi-
tions are represented by small blue rectangles.
Figure 3: HiPS model design buttons.
We exploit a hierarchy to adjust logic synthesis
in order to describe the logic circuits in an embed-
ded system. The tool can generate a hierarchical and
timed Petri net design by considering a subpage that
describes the Petri net model relative to a given ob-
ject. HiPS can apply hierarchical modeling to connect
lower subpage instances, as shown in Figure 4 where
subpage instances are represented by large blue rect-
angles. A subpage instance possesses transition ports
or place ports.
Figure 5 shows the system construction of the
composition framework in HiPS. The Petri net design
and simulator can be constructed on top of the inter-
face. When performingverifications, such as dynamic
analyses, the HiPS GUI loads the state space gener-
ation engine in the background using the “wrapper-
engine” wrapper application. The core portion of the
tool is implemented in C#. HiPS is also implemented
in the C++ language for state space generation be-
cause C++ has a rich parallel collection and good ex-
ecution speed. Note that we use the Intel C++ com-
piler, which is an optimizing compiler, and Intel TBB,
which is a C++ parallelization library.
Figure 4: Example hierarchical structure with subpage in-
stances.
Figure 5: HiPS composition framework.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
358
3 EXHAUSTIVE STATE SPACE
GENERATION BY PARALLEL
THREADS
The state space generator presents all possible behav-
iors of the entire system as a labeled transition system
(LTS), which comprises the set of all states reachable
from the initial state (Ohta and Wasaki, 2013). State
spaces are expressed by the LTS and are output in
Aldebaran automaton format, which is a file format
of the LTS. The LTS labels the transitions between
states and describes the system behavior based on an
event.
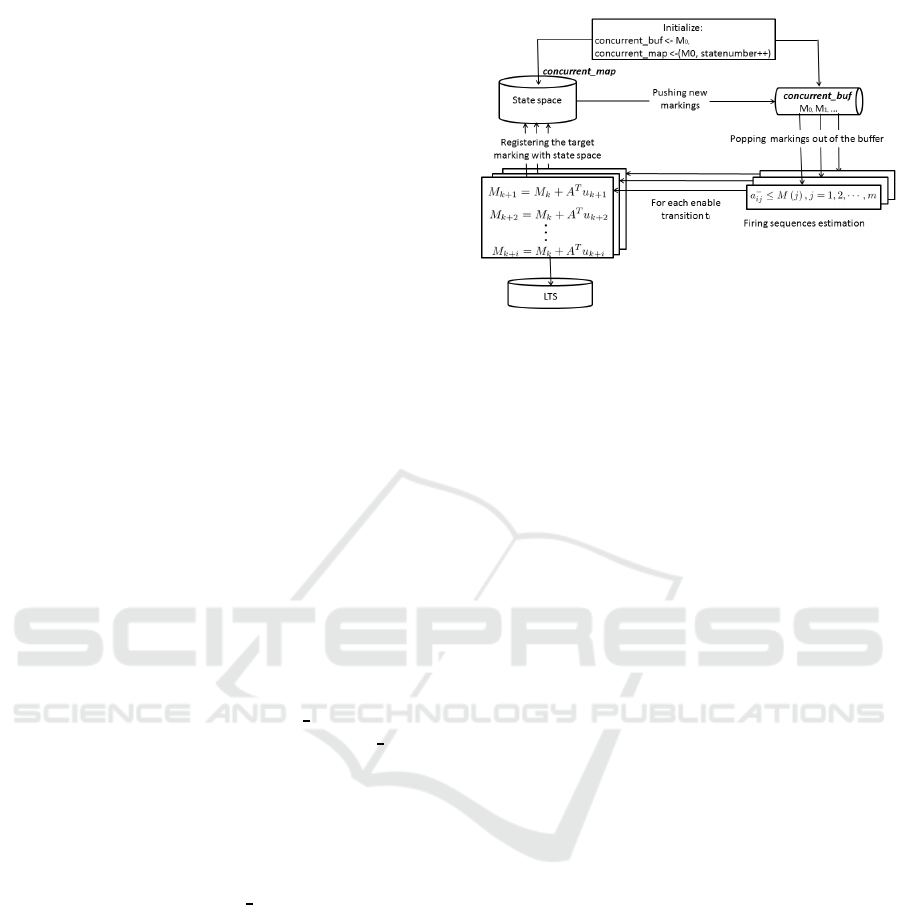
To speed up generation of the state space, we im-
plement multi-threading in the generator engine. Fig-
ure 6 shows the flow of the algorithm for the ex-
haustive state space generation using parallel threads.
The generation algorithm of the reachable graph is
shown (Murata, 1989). Since the firing evaluation
of the marking can be determined, generation of
the next marking is finished in a finite step. The
choice of marking from the next marking list is non-
deterministic and state space does not depend in the
order of marking selection. Therefore, it is possible
to parallelize the loops for selecting markings from
the next marking in the generation algorithm.
By adopting TBB container, we have imple-
mented state space generator by multi-threading in
HiPS tool. Newly generated marking(s) in state space
would be contained in “concurrent buf”, and the
generated state space is stored in “concurrent map”
Each container is used to be implemented thread-safe
container by TBB. The parallel executions operate a
series of processes, that is, the firing sequence esti-
mation, inserting and searching a new marking, and
obtaining transition relations. The generating process
adds a marking to the state space if it finds a new
marking from the “concurrent
map”.
4 DYNAMIC BEHAVIOR AND
STRUCTURAL ANALYSIS
4.1 Dynamic Behavior Properties
Examples of dynamic property analysis include
reachability graph analysis, (extended) coverability
graph analysis, deadlock analysis, k-bounded analy-
sis, reversibilityanalysis, and synchronic distance and
fairness analysis. The dynamic properties depend on
the initial marking and are in fact analyzed by gener-
ating the set of reachable state spaces.
Figure 6: Algorithm flow for exhaustive state space genera-
tion by parallel threads.
4.1.1 Reachable Analysis
A marking M
n
is said to be reachable from marking
M
0
if there exists the firing sequence σ s.t. M
0
σ
−→ M
n
.
For a net (N, M
0
), the set of all markings reachable
from M
0
is denoted R(N, M
0
). Reachability analysis
in HiPS enumerates all reachable markings from the
initial marking and the transition relations between
markings.
4.1.2 Coverability Graph Analysis
A marking is coverable if there exists M
1
in R(N, M
0
)
s.t. M
1
(p) ≤ M(p) for all places p in the given net.
The coverability analyzer constructs a finite graph
structure to represent a reachable marking as a tree
node and the firing transition as a tree connection by
introducing ω to cut off an unbounded net. If a mark-
ing reachable from the initial marking is detected, the
transition between the markings is listed.
Note that the current coverability graph generator
cannot introduce firing sequences without maintain-
ing information about transitions because the ω no-
tation would lose information about specific behav-
iors only to manage information about more than one
token. Therefore, we introduce ECGs and perform
unconditional fair analysis. Note that an ECG is ex-
pressed by three special symbols, that is, N
u
, N
c
, and
N
d
, rather than ω.
4.2 Structural Properties
Structural properties depend on the topological struc-
ture of the Petri nets. These properties are charac-
terized by incidence matrices and homogeneous ex-
pressions related to these matrices. Structural prop-
erties are independent of the initial marking in that
they maintain their properties for any initial marking
Hierarchical Petri Net Simulator: Simulation, Design Validation, and Model Checking Tool for Hierarchical Place/Transition Petri Nets
359
or are concerned with the existence of certain firing
sequences from some initial marking. Note that we
assume all Petri nets are pure when analyzing struc-
tural properties.
HiPS can check for seven characteristics, that is,
structurally bounded, (partially) conservative, (par-
tially) repetitive, (partially) consistent, structurally
unbounded, unconservative, and inconsistent charac-
teristics.
When A is the incidence matrices of the Petri net
and x is the firing count vector, the integer solution
x of equation A
T
x = 0 is considered T-invariant, and
when A is the incidence matrices of the Petri net and
y is the firing count vector, the integer solution y of
Ay = 0 is considered S-invariant. The partially con-
servative and partially repetitiveproperties are present
if and only if there exists such an invariant solution.
Thus, the properties analyzer can also calculate the
invariant.
5 ON-THE-FLY MODEL
CHECKING
5.1 Fluent LTL On-the-fly Model
Checking in HiPS
Automatic model checking methods are based on
state space exploration. However, exploring an en-
tire state space incurs significant memory and time
costs. On-the-fly checking reduces the effort required
to generate and search the state space (Schwoon and
Esparza, 2005). In on-the-fly checking, the search
process operates concurrently with the state space
generation process. In addition, on-the-fly checking
can terminate searching to generate a state space ear-
lier rather than constructing the overall state space
when an acceptable sequence is detected.
In association with CADP tools (VASY/INRIA,
2015), HiPS can perform model checking. However,
currently, it is essential toconstruct the full state space
for model checking. We have addressed this require-
ment by implementing on-the-fly model checking to
HiPS(Harie and Wasaki, 2015). Of the many for-
mal languages available, we introduce LTL, which
is a well-known language used in SPIN (Bell Labs,
2016). To apply LTL model checking to event-based
systems, fluent, which is a truth-value predicate de-
fined by events, and fluent LTL (FLTL) have been
proposed (Giannakopoulou and Magee, 2003). Note
that the FLTL specification does not differ from LTL.
We attemptedto implement an FLTL on-the-fly model
checker.
To achieve on-the-fly model checking, we im-
plemented a verification process for parallel execu-
tion of the state space generator. The IPC channel
(Stevens et al., 2003) is defined as a communication
service within the same machine for remoting in .NET
Framework. By using the IPC channel, the state space
generator can be expanded to include an LTS transfer
function. The state space generation process and the
verification process can transmit and receivesuch data
using a remote object to transfer LTS data.
5.2 Priority Estimation for State Space
Generation
We aim to improve the efficiency of the implementa-
tion of on-the-fly model checking. We implemented
on-the-fly model checker by using the Nested-DFS al-
gorithm (Harie and Wasaki, 2016). By operating the
implemented model checker, we state the following
results. IPC information transfer creates overhead;
thus, one approach is to improve the transfer method.
Considering the data transfer overhead, it is desirable
to transfer data collectively rather than sequentially.
Recently, we use an LTS, in which transferred data
are represented by a data structure that uses vector
classes. We seek to redefine this format to its data
format in order to generate more compact data (e.g.,
unsigned integers).
Here, we describe our state space generation ap-
proach. The Nested-DFS algorithm searches accept-
able sequences in synchronization automaton. So a
Path to acceptable sequences depends on specifica-
tion, it is desirable to generate state space on specifi-
cations. We consider a strategy in which the transition
in the given specification is considered high priority.
Note that a high priority transition is fired preferen-
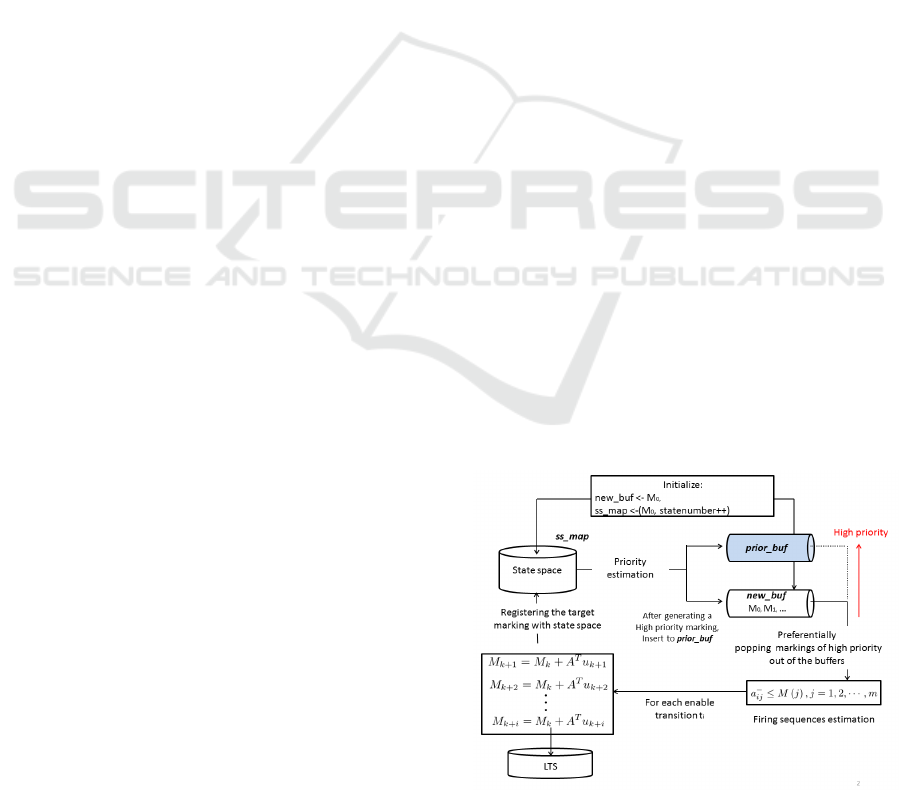
tially. Figure 7 shows the state space generation flow
with the priority estimation strategy.
Figure 7: Algorithm flow of state space generation with the
priority estimation strategy.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
360

Note that information about transitions with
higher priority can be obtained before the state space
is generated. Currently, in state space generation, a
single buffer is used to store new markings. There-
fore, when a new marking is generated, the firing pos-
sibility is evaluated from the marking, and the highest
priority marking is selected if a given condition ap-
plies. If a priority marking is selected, it is inserted
into the priority generation buffer; otherwise, it is in-
serted into the normal buffer. After generating a high
priority marking, the algorithm inserts it into the be-
ginning of the normal buffer.
Here, we consider methods to prioritize transi-
tions. One approach is to set priorities by analyzing a
specification automaton in advance. The rating anal-
ysis for a specification automaton is expected to be
calculated relatively quickly because the number of
states in the specification automaton is much smaller
than that of the state space. Another approach is to
update priority relative to transition appearance fre-
quency in the set of priority transitions when generat-
ing the state space.
6 CONCLUSION
In this paper, we have shown how the HiPS tool can
be used to simulate hierarchical modeling of Petri
nets and analyze the structural and dynamic proper-
ties of Petri nets. The current release supports ECGs
with synchronic distance. In addition, the HiPS tool
incorporates on-the-fly model checking to describe
LTL (FLTL) and accomplish specification descrip-
tion support. The technology described in this paper
has potential as an integrative execution system. Fu-
ture work includes support for model correction and
model checking by simulating obtained counter ex-
amples. SPEC PATTERNS have been proposed to
describe property specifications for finite-state veri-
fication (SAnToS laboratory, 2015).
REFERENCES
Bell Labs (2016). Verifying Multi-threaded Software with
Spin. http://spinroot.com/spin/whatispin.html.
Clarke, E. M., Grumberg, O., and Peled, D. (2001). Model
checking. MIT Press.
Dingle, N. and Knottenbelt, W. (2016). QPN-Tool
for the Specification and Analysis of Hier-
archically Combined Queueing Petri Nets.
http://pipe2.sourceforge.net/.
Falko Bause, P. B. and Kemper, P. (1996). Platform
Independent Petri net Editor 2. http://ls4-
www.cs.tu-dortmund.de/QPN/QPN-TOOL
arti-
cle/article/article.html.
Giannakopoulou, D. and Magee, J. (2003). Fluent model
checking for event-based systems. In Proceedings of
the 11th ACM SIGSOFT Symposium on Foundations
of Software Engineering 2003 , 2003, pages 257–266.
ACM.
Harie, Y. and Wasaki, K. (2015). On-the-fly LTL Model
Checker on the Petri Net Design Tool : HiPS. In 14th
Forum on Information Technology, FIT2015, pages
139–142.
Harie, Y. and Wasaki, K. (2016). Formal Verification of the
Safety Testing for Remote Controlled Consumer Elec-
tronics Using the Petri Net Design and Tool: HiPS. In
5th IEEE Global Conference on Consumer Electron-
ics, GCCE2016, pages 290–294.
Iakushkin, O., Shichkina, Y., and Sedova, O. (2016). Petri
Nets for Modelling of Message Passing Middleware
in Cloud Computing Environments, pages 390–402.
Springer International Publishing, Cham.
Murata, T. (1989). Petri nets: Properties, analysis and ap-
plications. In Proceedings of the IEEE, volume 77,
pages 541–580.
Ohta, I. and Wasaki, K. (2013). Model Designing using A
Petri Net Tool and State Space Generation Algorithm
for Post-Verification Tool. In 12th Forum on Informa-
tion Technology, FIT2013, pages 171–174.
Reinders, J. (2007). Intel Threading Building Blocks.
O’Reilly & Associates, Inc., Sebastopol, CA, USA,
first edition.
Reisig, W. (1985). Petri Nets: An Introduction, volume 4
of EATCS Monographs on Theoretical Computer Sci-
ence. Springer.
SAnToS laboratory (2015). Spec Patterns.
http://patterns.projects.cis.ksu.edu/.
Schwoon, S. and Esparza, J. (2005). A note on on-the-fly
verification algorithms. In Proc. Tools and Algorithms
for the Construction and Analysis of Systems, 11th In-
ternational Conference, TACAS 2005, pages 174–190.
Stevens, W. R., Fenner, B., and Rudoff, A. M. (2003). UNIX
Network Programming, Vol. 1. Pearson Education, 3
edition.
VASY/INRIA (2015). CADP toolbox. http://cadp.inria.fr/.
Westergaard, M. and Verbeek, H. E. (2016). CPN tools.
http://cpntools.org/.
Hierarchical Petri Net Simulator: Simulation, Design Validation, and Model Checking Tool for Hierarchical Place/Transition Petri Nets
361
