
Optimal 3D Kinematic Analysis for Human Lower Limb Rehabilitation
Hachmia Faqihi
1
, Maarouf Saad
2
, Khalid Benjelloun
1
, Mohammed Benbrahim
3
and M. Nabil Kabbaj
3
1
LAII, Ecole Mohammadia d’Ingnieurs, Mohammed V University, Rabat, Morocco
2
Ecole de Technologie Suprieure, Montreal, Canada
3
LISTA, Faculty of Sciences, University of Fez, Morocco
Keywords:
Robotics, Rehabilitation, Inverse Kinematics, Human Leg, Trajectory Generation, Optimization, Minimum
Jerk.
Abstract:
The majority of the kinematics analysis carried out on the human body are usually available only for use in
the sagittal plane. Limited studies were interested in this analysis in all three planes (sagittal, transverse, and
frontal) where motions of all joints occur.
The aim of this paper is to develop a new optimal kinematic analysis of human lower limbs in three-
dimensional space for a rehabilitation end. The proposed approach is focused on optimizing the manipulability
and the human performance of the human leg, as being a physiologically constrained three-link arm. The ob-
tained forward kinematic model leads to define the feasible workspace of the human leg in the considered
configuration. Using an effective optimization-based human performance measure that incorporates a new
objective function of musculoskeletal discomfort, the optimal inverse kinematic (IK) model is obtained.
1 INTRODUCTION
Nowadays several neurologic injuries such as neuro-
muscular diseases, spinal cord injury cerebellar dis-
orders, stroke, or impaired functions of the member
musculature lead to the joint disorders. Indeed, the
lower limb is usually including chronic pain, atypical
gait patterns, reduced range of motion (ROM), weak
strength, and increased joint stiffness, as well as se-
vere functional limitations, and thereby reducing pa-
tient’s quality of life.
To remedy these problems, we use the rehabili-
tation process, based on physical therapy to restore
patient’s strength, mobility and fitness. Traditionally,
limb physical therapy sessions were carried out man-
ually with assistance of therapists. However, the poor
performances in terms of duration, strength and task
orientation of the training, and the inconsistency in
therapy sessions from one session to another have
been noted, as principles issues, to encouraged many
researchers to require the robotic, where a good re-
peatability, and a precisely controllable assistance,
providing quantitative measures of the subject’s per-
formance and reducing the required labor of physi-
cal therapists are carried out. Therefore, the use of
robotics in this context needs to take into account the
different biomedical constraints imposed in the study
of this system (H. Faqihi and Kabbaj, 2016).
Generally, robotic is largely used in many applica-
tions such as medical, physical and industrial, where
high accuracy, repeatability, and stability of the op-
erations are required. For different robotic studies,
the developpement of control laws is commonly exe-
cuted in joint space. Howerver, the motion planning
is given in the task space, especially when it comes to
real applications as rehabilitation, where the desired
input is usually the end effector position in task space.
Hence the necessity to resorting to the Inverse Kine-
matic (IK) task to find a configuration at which the
end-effector of the robot reaches a given point in the
task space.
Several researches have been provided to derive
the IK problem, especially for redundant articulated
robotic arm, such as a parts of human body, where the
complexity is enhanced with the increased Degrees
Of Freedom (DOF). Thereby, solving the IK problem
is quite a challenging task, where its complexity lies
in the robots geometry and nonlinear relation between
cartesian and joint space.
The most popular IK methods developed in
the literature are algebraical, geometrical methods
(W. M. Spong and Vidyasagar, 2006), and the analyt-
Faqihi, H., Saad, M., Benjelloun, K., Benbrahim, M. and Kabbaj, M.
Optimal 3D Kinematic Analysis for Human Lower Limb Rehabilitation.
DOI: 10.5220/0006477701770185
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 177-185
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
177

ical methods (A. Ochsner, 2014), using the pose (po-
sition and orientation) as a given goal, (V. Kumar and
Shome, 2015), (S. Tejomurtula, 1999), (J.M.Porta,
2005). They are usually designed for a very spe-
cific task, and remain very limited for the higher DOF
robots. They do not guarantee closed form solutions,
and they are entirely sensible to the starting point and
singular configuration problem.
Taking into account the dynamic of motion, the
Jacobians method can also be used to resolve the IK
problem, but it has been pointed out that it does not
provide all credible solutions. Additionally, these
traditional solution methods may have a prohibitive
computational cost because of the high complexity of
the geometric structure of the robotic manipulators.
To summarize, the application of the classical IK
methods for the human body, besides its complexity,
remains just viable mathematically, do not take into
account the physiological feasibility and biofidelity of
human posture, and suffer from numerical problems
(K.Abdel-Malek, 2004) .
Optimization based approaches can be suitable ways
to overcome the above mentionned problems. It refers
to predict the realistic posture of human limb in its
feasible workspace. As any optimization problem, for
the posture prediction problem, the joint angles of the
human leg are considered as the design variables, the
constraints are considered according to physiological
feasibility and motion precision, and for the objective
function, the human performance measures are used.
There are many forms used in the literature to de-
fine the human performance measure, such as phys-
ical fatigue defined as reduction of physical capac-
ity. It is mainly the result of three reasons: magni-
tude of the external load, duration and frequency of
the external load, and vibration (Chen, 0004). How-
ever, for the movements required low speed such as
rehabilitation exercises, the physical fatigue is not so
significant. Indeed, the required movements can lead
to some human discomfort (K.Abdel-Malek, 2004),
where its evaluation may vary from person to person,
such as potential energy (Z. Mi, 2009), torque joints,
muscle fatigue, or perturbation from a neutral position
(W. M. Spong and Vidyasagar, 2006).
This study seeks to introduce a general
optimization-based formulation for posture pre-
diction of human lower limb exclusively in all
sagittal, transverse, and frontal planes with seven
degrees of freedom. Refering to the published
studies, the proposed kinematic analysis is the
first one developed in 3D plane. A new objective
function incorporating three factors that contribute to
musculoskeletal discomfort is developed as human
performance measure.
To better illustrate these aspects, the remainder of
the paper is organized as follows: In section II, the
human leg modeling will be presented. The forward
kinematics has been developed in the three planes
where motions of the human lower limb occur with
seven degrees of freedom. According to that, in sec-
tion III, the feasible workspace have been established.
In section IV, the new optimal posture prediction has
been described and thereby applied on the human
lower limb for the provided motion configuration. To
check the effectiveness of the proposed approach, in
section V, a simulation model has been developed us-
ing Matlab package. To sum up, the results of the
study are outlined in section VI.
1.1 Human Lower Limb Description
The human body is a complex system, its biomechani-
cal modeling represents a simplification of its real op-
erating. The introduction of assumptions is necessary
in this order, which are selected according to the de-
sired performances.
The model adopted for the lower limb represents a
system of articulated links connected by joints, based
on three segments to model its anatomical structure:
thigh, shank and foot considered as the length be-
tween ankle and metatarsal.
The connection of all three segments is ensured
naturally by ligaments and muscles, and should be
kinematically redundant to ensure biofidelity of the
human leg motion (S. Tejomurtula, 2005).
For a static analysis, the human leg is modeled
by a kinematic chain of rigid bodies, interconnected
by kinematic joints, which can be either simple or
complex according to required physiological behav-
ior, and thus the degree of freedom associated with
the possible joints. The principal joints are hip, knee,
and ankle (H. Faqihi and Kabbaj, 2016).
According to the special rehabilitation use, we
are interested in this study, to the human leg
motion provided in three planes of the space,
where the motion of the human leg is provided
for sevens degree-of-freedom, defined as: 3 DOF
hip (extension-flexion degree-of-freedom, abduction-
adduction degree-of-freedom, and inversion-eversion
degree-of-freedom), 1 DOF knee (extension-flexion
degree-of-freedom), 3 DOF ankle (extension-flexion
degree-of-freedom, abduction-adduction degree-of-
freedom, and inversion-eversion degree-of-freedom),
as depicted in figure 1.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
178
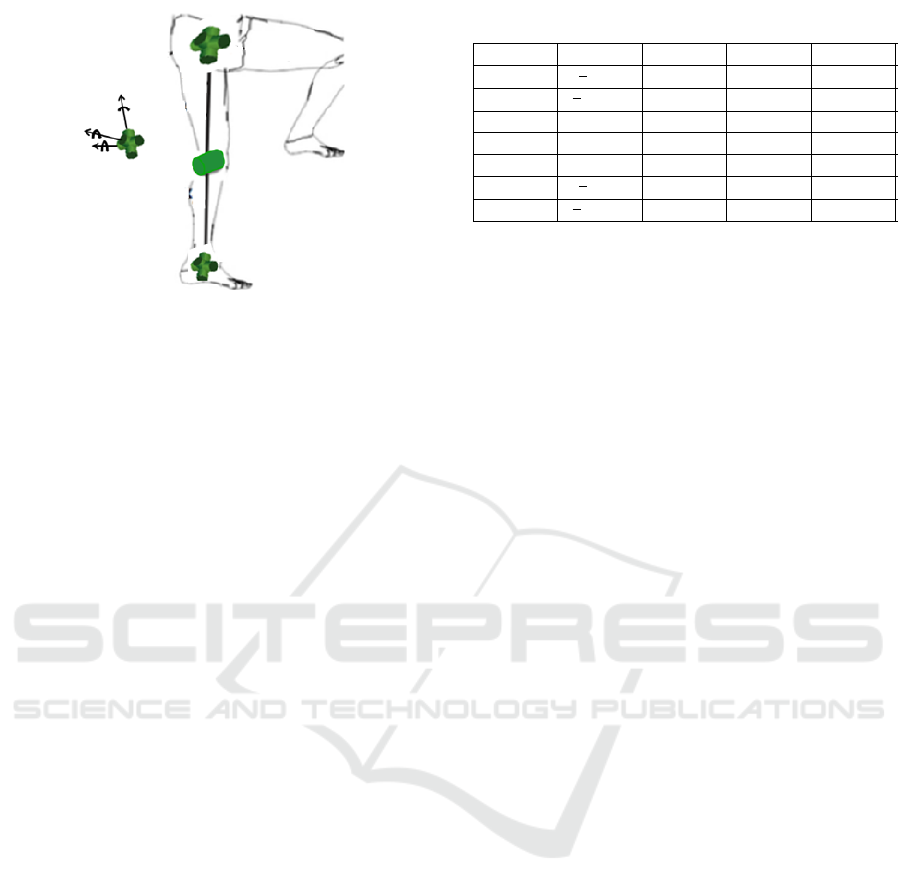
Figure 1: Coordinate systems on 7 DOF of the human leg.
1.2 Anthropometric Parameters
The modeling of body segments must take into ac-
count some anthropometric parameters.
In order to customize the model, accurate mea-
surements of the anthropometric parameters are re-
quired and can be obtained from statistical tables pro-
posed in (S. Tejomurtula, 2005). It refers to adopt a
proportional anthropometric model, based on statisti-
cal regression equations to estimate these segmental
inertial parameters (PIS).
For this study, physical length segments will be
used. They can be computed using total body height
(H).
1.3 Range of Motion
Due to the biomechanical constraints of human body
motion, the bounds of the joint variables are fixed,
which define the Range of Motion (ROM).
Defining ROM of the human lower limb model, is
not limited to the designed mechanical structure, but
also to the human physiological factors, such as the
age, body build, gender, health condition (D.B. Chaf-
fin, 1992). Generally, the ROM of human legs, based
on a previous study by (C.S. Hernandez and Rodr-
guez, 2011) is given in the table I.
1.4 Comfort Zone
To ensure the comfort motion of the human body,
each joint variable can be defined by its comfort zone,
which must belong to the range of motion (ROM) of
the associated joint variable.
Referring to the literature, the comfort zone repre-
sents 35% of the range of motion (ROM). The center
of the comfort zone, q
ic
, is calculated by the following
expression (S. Glowinski, 2016):
Table 1: DH human leg parameters for 5dof.
Joint(i) α
i
a
i
d
i
q
i
1
-
π
2
0 0 q
1
2
π
2
0 0 q
2
3 0 a
1
0 q
3
4 0 a
2
0 q
4
5 0 a
3
0 q
5
6
-
π
2
0 0 q
6
7
π
2
0 0 q
7
q
C
i
= 0.5(q
u
icz
+ q
l
icz
) + q
h
i
(1)
where q
u
icz
, and q
l
icz
are respectively, the upper and
lower angles of the comfort zone, for the i
th
joint vari-
able associated. q
h
i
is the home position angle of the
i
th
joint variable. Generally, the home position an-
gle can differ from tested tasks (standing, recumbent,
seating,...).
2 FORWARD KINEMATIC
ANALYSIS
The forward kinematic (FK) model in n plane, can
determine the pose of the end-effector (x
j
, j = 1...n),
from given joint variables (q
i
,i = 1 .. .DOF). It is a
necessary step in the kinematic anlysis process.
x
j
= f (q
i
) (2)
For the rigid bodies robotic systems, several methods
can be used to resolve this problem.
Despite of the human body complexity, for all
practical purposes, it has been shown that approxi-
mated modeling of gross human motion, in order to
ensure human motion simulation, ergonomic analy-
sis, or rehabilitation process, can be achieved using
homogenous transformation matrices method, and the
Denavit Hartenberg (DH) representation, based on
appropriate kinematic coordinates.
Indeed, the DH method provides an adequate, and
systematic method for embedding the local coordi-
nate systems for each link.
The forward kinematic human leg model is devel-
opped from the DH parameters (Dombre and Khalil,
2007) where each degree-of-freedom can be modelled
as a revolute joints. The DH parameters are depicted
in table 1, from the defined kinematic coordinates.
From the provided D-H parameters, the forward
kinematic model can be computed using the trans-
fomation matrix, given in relation 3. Generally, the
transformation matrix is the relationship expression
between two consecutive frames i−1 and i, which de-
pends on the described parameters (q
i
,α
i
,a
i
,d
i
) given
Optimal 3D Kinematic Analysis for Human Lower Limb Rehabilitation
179

in the Table II.
i−1
T
i
=
cq
i
−sq
i
cα
i
sq
i
cα
i
α
i
cq
i
sq
i
cq
i
sα
i
−cq
i
sα
i
α
i
sq
i
0 sα
i
cα
i
d
i
0 0 0 1
(3)
The global transformation matrix for seven DOF can
be expressed by:
0
T
7
=
0
T
1
.
1
T
2
.
2
T
3
.
3
T
4
.
4
T
5
.
5
T
6
.
6
T
7
(4)
From
0
T
7
the forward kinematic model is given by
the following equation:
x
y
z
=
a
2
c
1234
+ a
1
c
123
+ a
3
c
1234
c
4
− a
3
s
1234
s
5
a
2
s
1234
+ a
1
s
123
+ a
3
s
1234
c
4
+ a
3
c
1234
s
5
−a
1
s
23
− a
2
s
234
− a
3
s
234
c
4
− a
3
c
234
s
5
(5)
where: c
1234
= cos(q
1
+ q
2
+ q
3
+ q
4
), s
1234
=
sin(q
1
+q
2
+q
3
+q
4
), c
123
= cos(q
1
+q
2
+q
3
), s
123
=
sin(q
1
+ q
2
+ q
3
), c
12
= cos(q
1
+ q
2
), s
12
= sin(q
1
+
q
2
), c
4
= cos(q
4
), s
4
= sin(q
4
), and s
5
= sin(q
5
).
In terms of velocitiy and acceleration, the forward
kinematic is given by:
˙x
j
= J ˙q
i
, ¨x
j
= J ¨q
i
+
˙
J ˙q
i
(6)
where ˙x
j
, ¨x
j
, represent respectively the end-effector
velocity, the end-effector acceleration in task space,
J and
˙
J, represent the jaccobian matrix of the system
and its deerivative. Finally, and ˙q
i
and ¨q
i
represent
respectively the end-effector velocity and acceleration
in joint space.
2.1 Feasible Workspace
In order to analyze the feasible workspace associated
to the human lower limb, where we plot the differ-
ent possible positions of foot which can be achieved,
the direct kinematic model f (q
i
) is used. Thus, the
workspace can be defined as the set of all the possible
positions in the task space according to the ROM, as
following:
E
p
= {q
i
∈ ROM/
∑
j
x
j
= f (q
i
)} (7)
Using the appropriate forward kinematic model given
in equation 5, and the ROM described in the table I,
the feasible workspace can be plotted for the motion
provided according to the used configuration.
3 PROPOSED OPTIMIZATION
APPROACH
3.1 Problem Formulation
The optimal posture prediction is considered to be a
constrained optimization problem (CO), using a con-
straint to find a realistic configuration.
Generally, the CO problem can have equality and/or
inequality constraints according to the described
problem, and the objective function, which requires
some assumptions according to the continuity and dif-
ferentiability. In that fact, in the following the opti-
mization problem model are described:
3.1.1 Design Variables
The design variables represent in this case, the joint
variables q
i
, i = 1...DOF, following the used config-
uration.
3.1.2 Constraints
The first constraints consider the difference between
the current end-effector position, velocity, and accel-
eration, and the given target position, velocity and ac-
celeration respectively in cartesian space, as follow-
ing:
||x
computed
j
(q
i
) − x
desired
j
(q
i
)|| ≤ ε
1
|| ˙x
computed
j
(q
i
) − ˙x
desired
j
(q
i
)|| ≤ ε
2
(8)
|| ¨x
computed
j
(q
i
) − ¨x
desired
j
(q
i
)|| ≤ ε
3
(9)
where ||.|| define the euclidean norm. The end-
effector position x
computed
j
hits a predetermined target
point x
desired
j
in cartesian space, within a specified tol-
erance ε
1
a small positive number that approximates
zero, similarly to end-effector velocity and accelera-
tion.
It should be noted that, determining the end-
effector position, velocity and acceleration are en-
sured using the forward kinematic model (equations
5, 6 and 7).
On the other hand, each joint variable is con-
strained to lower and upper limits, represented by q
l
i
and q
u
i
, respectively. These limits ensure that the hu-
man posture does not assume an unrealistic position
to achieve the target point.
To more rigorous biofidelity end, we can choose
that each joint variable is constrained to lie between
upper and lower angles of the comfort zone, designed
by q
u
icz
and q
l
icz
respectively.
q
l
icz
≤ q
i
≤ q
u
icz
(10)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
180

Finaly, the constraints in term of velocity and accel-
eration limits are used, as following.
˙q
l
i
≤ ˙q
i
≤ ˙q
u
i
(11)
¨q
l
i
≤ ¨q
i
≤ ¨q
u
i
(12)
where ˙q
l
i
and ¨q
l
i
are the lower limit of velocity and ac-
celeration, ˙q
u
i
, and ¨q
u
i
are the upper limits of velocity
and acceleration respectively. These limits are fixed
according to biomedical studies, where the physiolog-
ical and health state of patient are taken into account.
3.1.3 Cost Function
As described previously, the posture prediction re-
quires a human performance measure, where its rig-
orous choice ensures the optimal realistic posture.
To this end, the modeling musculoskeletal discomfort
is used as human performance measure, which can be
somewhat ambiguous, as it is a subjective quantity,
thus its evaluation may vary from one person to an-
other (K.Abdel-Malek, 2004).
According to the last described researches
(K.Abdel-Malek, 2004; Z. Mi, 2009), in this order,
different forms of human performance measures have
been adopted, but it often results in postures with
joints extended to their limits, and thus to some un-
comfortable positions.
As remedy, we can add factors associated with
moving while joint variables are near their respective
limits in terms of position, velocity and acceleration.
In this respect, it is possible to incorporate different
factors that contribute to discomfort. The first fac-
tor, is referred to the tendency to move different seg-
ments of the body sequentially. The second factor, is
referred to the tendency to gravitate to a reasonably
comfortable position. Finally, the discomfort associ-
ated to the motion while joints are near their ROM in
term of position, velocity and acceleration, expresses
the third factor.
According to the previous studies, the proposed
objective function is similar to that adopted by
(J.Yang, 2004) applied for the upper limb. However,
there is currently no research focused on prediction of
human leg posture, by applying this form of discom-
fort, with the restriction particularity of 15%, taking
into account the end-effector position, velocity and
acceleration.
In order to incorporate the first factor, we can find
several strategies which induce motion in a certain or-
der, or with higher weighted joints than others. Con-
sider q
ic
the comfortable position of i
th
joint vari-
able, measured from the home configuration defined
by q
h
i
= 0. Then, conceptually, the displacement from
the comfortable position for a particular joint position
is given by: |q
i
− q
ic
|.
However, to avoid numerical difficulties and non-
differentiability, we can use: (q
i
− q
ic
)
2
.
Generally, terms should be combined using a
weighted sum w
i
, to emphasize the importance of par-
ticular joints depending on the characteristics of each
patient. Thereby, the joint displacement function is
given as follows:
f
displacment
=
∑
i
w
i
(q
i
− q
ic
)
2
(13)
The weights are used to approximate the lexico-
graphic approach (R.T. Marler, 2009).
In order to incorporate the tendency to gravitate to
a reasonably comfortable neutral position, each term
in equation (13) is normalized, as described in the fol-
lowing:
∆q
i
=
q
i
− q
ic
q
u
i
− q
l
i
(14)
Each term of (∆q
i
)
2
of this normalization scheme is
considered as a fitness function with each individual
joint and has normalized values, which lie between
zero and one.
The principal limitation of this approach often re-
sults in postures with joints limits extended, thereby
an uncomfortable joint. In this order, the third factor
is introduced, which defines the discomfort of mov-
ing while joints are near their respective limits. This
factor requires to add some designed penalty terms to
increase significantly the discomfort where joint val-
ues are close to their limits.
Generally, the new designed penalty term P(d) is
a barrier penalty function (H. A. Eschenauer, 1989),
of d argument, expressed by:
P(d) = (sin(a.d + b))
p
(15)
The P(d) function is adapted to penalize any number
d, considered as normalized parameters, which is ap-
proaching zero at some number value.
The proposed idea is that the penalty term remains
zero until the d value reaches d ≤ 0.15, which defines
the desired curve data.
Thereby, the parameters a, b, and p of the basic
structure of barrier penalty function are fitted to reach
the desired curve data.
According to the three described factors, the con-
sequent discomfort function is obtained as follows:
f
dicom f ort
=
DOF
∑
i=1
[w
i
(∆q
i
)
2
+ P(R
pui
) + P(R
pli
) (16)
+P(R
vui
) + P(R
cli
) + P(R
aui
) + P(R
ali
)]
where P(R
pli
) and P(R
pui
), P(R
vli
) and P(R
vui
),
P(R
ali
) and P(R
aui
) are the penality terms with joint
Optimal 3D Kinematic Analysis for Human Lower Limb Rehabilitation
181

values that approach their lower limits, and their up-
per limits, respectively for end-effector position, ve-
locity and acceleration.
R
pui
=
q
u
i
− q
i
q
u
i
− q
l
i
; R
pli
=
q
i
− q
l
i
q
u
i
− q
l
i
(17)
R
vui
=
˙q
u
i
− ˙q
i
˙q
u
i
− ˙q
l
i
; R
vli
=
˙q
i
− ˙q
l
i
˙q
u
i
− ˙q
l
i
R
aui
=
¨q
u
i
− ¨q
i
¨q
u
i
− ¨q
l
i
; R
ali
=
¨q
i
− ¨q
l
i
¨q
u
i
− ¨q
l
i
The penalty term that depends on parameter d, re-
mains zero as long as the upper or lower joint value
does not reach 15% of its range, as depicted in the
Figure 3.
3.1.4 Constrained Optimization Model
From the described design variables, constraints and
cost function, the final optimization problem can be
formulated, as the following:
min : f
Discom f ort
(q
i
)
sub ject to : ||x
computed
j
(q
i
) − x
desired
j
(q
i
)|| < ε
1
|| ˙x
computed
j
(q
i
) − ˙x
desired
j
(q
i
)|| < ε
2
|| ¨x
computed
j
(q
i
) − ¨x
desired
j
(q
i
)|| < ε
3
q
l
icz
≤ q
i
≤ q
u
icz
˙q
l
i
≤ ˙q
i
≤ ˙q
u
i
¨q
l
i
≤ ¨q
i
≤ ¨q
u
i
3.2 Propose Optimal Solution
The inverse kinematic optimization problem formu-
lated previously is a Nonlinear Optimization Problem
(NLP). Several numerical solutions of constrained
nonlinear optimization problems have been presented
in the literature. For resolution feasibility Sequen-
tial Quadratic Programming (SQP) is considered to
be suitable method (P. Gill and Saunders, 2002) to
resolve the proposed optimization problem. The al-
gorithm resolution is divided into three main steps, as
following:
– Step1: The first step begins by the initializa-
tion, where it is necessary to determine the total body
height of a subject and to calculate the length of
thigh, shank, and foot segments. Then, we fix the
initial joint position, velocity and acceleration vari-
ables, and calculate the initial guess as being initial
effector position, velocity and acceleration by using
forward kinematics, according to the used configura-
tion. Next, taking into account the joints constraints,
the workspace and the comfort zone of each joint are
computed.
– Step2: Giving the end position, velocity and ac-
celeration coordinates, in the second step, we check if
the position is in the workspace, else it is necessary to
find new coordinates.
– Step3: SQP optimization technique is applied in
this step to find the optimal postures. This is per-
formed using Matlab fmincon constrained function.
The obtained solution is a matrix with position, ve-
locity and acceleration angles. Taking into account
the comfort zone of each joint, the obtained angles
are the most comfortable.
4 TRAJECTORY GENERATION
In rehabilitation robots, the reference trajectory must
be predefined as a human limb motion practiced dur-
ing activities of daily live. Indeed, motion therapy
can be carried out in different modes including pas-
sive, active, active-resistive, active-assistive, and bi-
lateral exercises, which differ depending on the de-
gree of patient involvements. Selecting the proper
mode strategy requires an appropriate rehabilitation
robot choice, with concerned patients.
To determine the appropriate trajectory for the
movement of the rehabilitation robot, there are several
methods such as a prerecorded trajectory obtained by
gait analysis, and a prerecorded trajectory during ther-
apist assistance, which require data use, and mod-
elling the trajectory based on normative movements
which can be based on kinematics and/or dynamics
constraints during the path motion in terms of fitting
more realistic motion (Rastegarpanah and Mozafar,
2016).
Generally, it is desirable to use reference trajec-
tories ensuring the feasibility and biofidelity of re-
habilitation session. Researchers have found, from
observations of healthy voluntary limb movement in
joint space, that normal human movements follow
a smooth trajectory that minimizes the jerk (Hogan,
1984), defined as the time derivative of acceleration
and therefore the third-time derivative of position.
jerk(x) =
d
3
x
dt
(18)
The minimum jerk criterion is therefore very suitable
for the reference trajectories formulation of a rehabil-
itation robot. Firstly introduced using a point-to-point
trajectory for the lower human limb.
The minimum jerk trajectory of an end-effector is
obtained by the minimization of the integral of the
squared jerk over time. This corresponds to minimize
the function I, where T is the terminal time at which
the target position x
T
, velocity ˙x
T
and acceleration
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
182
¨x
T
are to be achieved when starting with the initial
position x
0
, velocity ¨x
0
and acceleration ¨x
0
:
I =
1
2
Z
T
0
( ¨x(t))
2
dt (19)
The condition for the trajectory x to minimise I is
given as (Xie, 2016):
x
(6)
t
= 0 (20)
Therefore, the minimum jerk trajectory occurs when
the sixth-time derivative of the trajectory function x
is equal to zero. The possible solution of this equa-
tion can be taken as a fifth-order polynomial in time
(equation 21), where a
0
; a
1
;a
2
; a
3
; a
4
and a
5
are con-
stants to be determined from the initial and terminal
conditions.
x(t) = a
0
+ a
1
t + a
2
t
2
+ a
3
t
3
+ a
4
t
4
+ a
5
t
5
(21)
˙x(t) = a
1
+ 2a
2
t + 3a
3
t
2
+ 4a
4
t
3
+ 5a
5
t
4
(22)
¨x(t) = 2a
2
+ 6a
3
t + 12a
4
t
2
+ 20a
5
t
3
(23)
Using the initial conditions t = 0, the first three con-
stants are obtained:
a
0
= x
0
a
1
= ˙x
0
a
2
= ¨x
0
(24)
Using the terminal conditions t = T , the last three
constants are obtained. Therefore, using the trajec-
tory generation in joint space and forward kinematic,
the trajectory in task space is obtained.
5 SIMULATION RESULTS
In order to show the effectiveness of the proposed ap-
proach, this section presents a simulation example of
the developed optimal posture prediction algorithm.
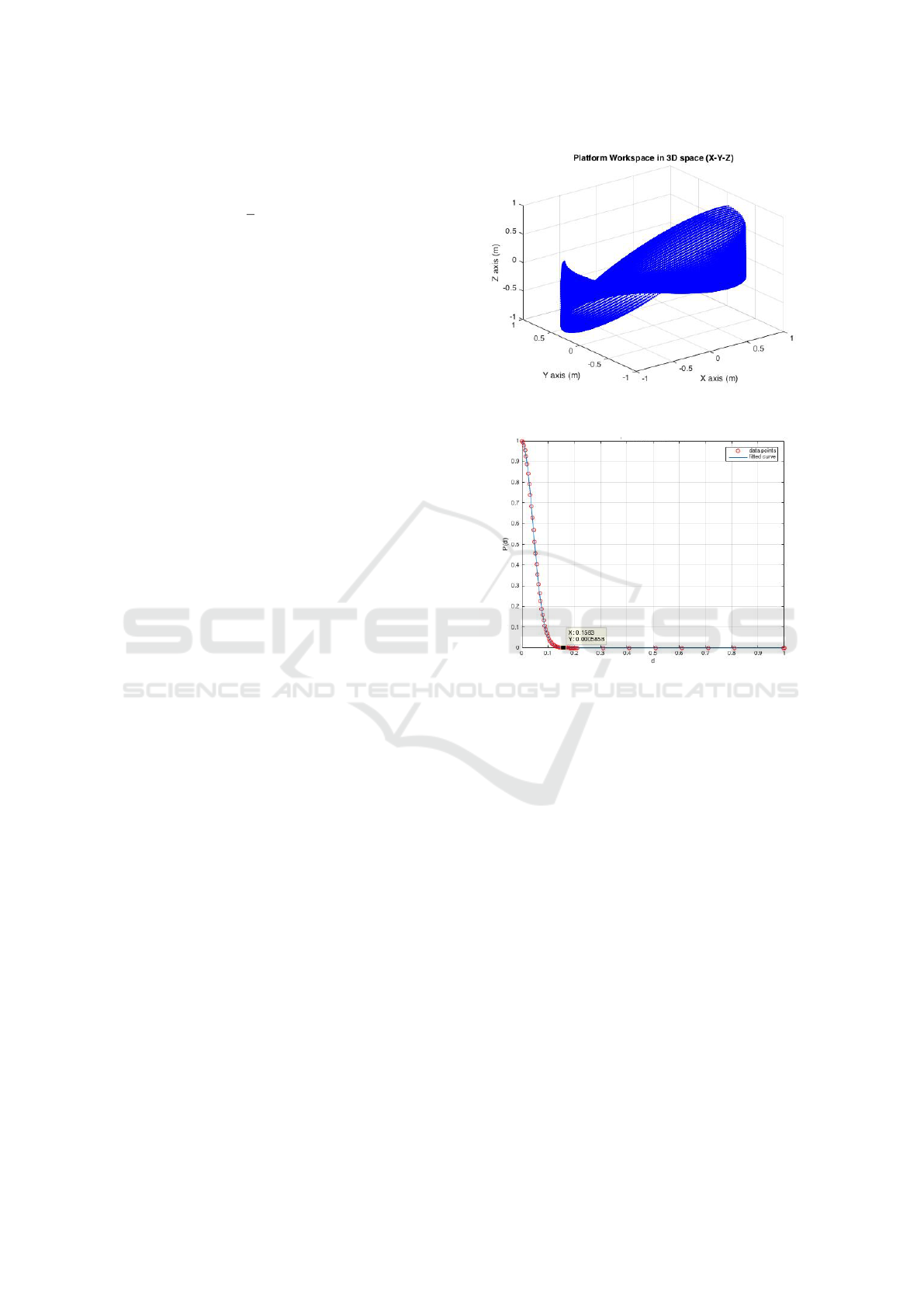
For a person of 1.80m height, using the anthropo-
metric associated data, the defined forward kinematic
model and the range of motion, the workspace is plot-
ted for the three-dimensional space as shown in Fig-
ure 2.
First the penality function P(d) is computed us-
ing equation (26) according to the desired curve data
as explained previously, by using Curve Fitting Pack-
age in Matlab, as depicted in Figure 3. The ob-
tained parameters of the penalty function are given by
: a = 2.5, b = 7.855, p = 100.
Thereby the final expression of the penality term
is given by:
P(d) = (sin(2.5d + 7.855))
100
(25)
Figure 2: Workspace for 3D space.
Figure 3: Penality term P(d).
To show the effectiveness of the optimal posture
algorithm, the initial value is fixed in joint space ac-
cording to the feasible biomechanical posture for the
used configuration as q
initguess
= [0, 0,0,0,10,0,0] (in
degree). ˙q
initguess
= [0, 0,0, 0,0, 0,0] and ¨q
initguess
=
[0,0, 0,0,0,0,0], where the result of the optimization
is usually sensitive to the initial guess.
The remain parameters are given by ε
1
= ε
2
=
ε
3
= 0.0001, the weight w
i
for the joints variables of
the lower limb, are defined in (R.T. Marler, 2009).
The optimum kinematic a parapmeters is obtained
using the desired motion in terms of end effector po-
sition, velocity as depicted in Figure 4, which belongs
to the defined workspace, and optimization designed
routine, where the objective function, and constraints
are defined, as described previously.
From the provided checking function, the end-
effector coordinates of desired motion are validated,
and then the optimal position, velocity and accelera-
tion joints are predicted as shown in figure 5, and 6.
One of the most important factors in the devel-
opment of any optimization problem is the selection
of the suitable fitness function and well defined con-
Optimal 3D Kinematic Analysis for Human Lower Limb Rehabilitation
183

Figure 4: Desired Cartesian-space Trajectory.
Figure 5: Obtained Joint-space Position.
straints according to the problem complexity as de-
scribed in this paper. Using SQP algorithm resolu-
tion for the proposed optimization problem formula-
tion the inverse kinematic model of 3D space human
leg configuration have been predicted, and represent
to our knowledge the first study carried out in the all
three plane of human leg configuration.
Figure 6: Obtained Joint-space Velocity.
6 CONCLUSION
A new general optimization-based formulation for op-
timal kinematic analysis for the human lower limb has
been develope, in this study. The proposed method
is developed specialy in three dimensional space, in
terms of the kinematic parameters, using an objective
function incorporating three factors that contribute
to musculoskeletal discomfort as human performance
measure.
The performance measure is referred to the ten-
dency to move sequentially all segments of the hu-
man leg, the tendency to move leg while joints are
near their ROM, and the discomfort associated with
gravitating around a reasonably comfortable position.
This new form of objective function is developed
principally for rehabilitation use, where physiologi-
cal patient constraints need to be taken into consider-
ation.
In this order, according to the physiological con-
straints and the developed forward kinematic model,
the feasible workspace is presented. To validate the
feasability and the effectiveness of the proposed kine-
matic method to predict the inverse kinematic model
of 3D space human leg configuration, a reference tra-
jectory is generated to be suitable in rehabilitation
case, and thereby, applied in the proposed algorithm
solution.
The simulation results, were present an optimal
joint space parameters defining the inverse kinemat-
ics.
However, this study still valid for the static pur-
pose, and can be improved according to a large defini-
tion of discomfort according to dynamical parameters
in term of muscle, fatigue... which can be developed
in the future research.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
184

ACKNOWLEDGMENT
This work has been supported by Automatic and In-
dustrial Informatics Laboratory (LAII), Ecole Mo-
hammadia dIngenieurs, Mohammed V University,
Rabat, Morocco; Integration of Systems and Ad-
vanced Technologies Laboratory (LISTA), Sciences
Faculty, Fes, Morocco; The Department of Electrical
Engineering, Ecole de Technologie Superieure, Mon-
treal, Canada.
REFERENCES
A. Ochsner, H. A. (2014). Design and computation of mod-
ern engineering materials. In Andreas chsner Holm
Altenbach, Advanced Structured Materials.
Chen, Y. (20004). Changes in lifting dynamics after local-
ized arm fatigue.
C.S. Hernandez, R. S. and Rodrguez, E. (2011). Design and
dynamic modeling of humanoid biped robot e?robot.
In CERMA, Cuernavaca, Mxico.
D. B. Chaffin, D. B. J. Anderson, . (1992). Occupational
biomechanics.
Dombre, E. and Khalil, W. (2007). Modeling, Performance
Analysis and Control of Robot Manipulators. Wiley
ISTE.
H. A. Eschenauer, G. T. (1989). Discretization methods and
structural optimization, procedures and applications.
In -Seminar October 5?7, Siegen, FRG.
H. Faqihi, M. Saad, K. B. M. B. and Kabbaj, M. (2016).
Tracking trajectory of a cable-driven robot for lower
limb rehabilitation”, international journal of electri-
cal. International Journal of Electrical, Computer,
Energetic, Electronic and Communication Engineer-
ing, 6(8):1022–1027.
Hogan, N. (1984). An organizing principle for a class of
voluntary movements.
J. M. Porta, L. Ros, F. (2005). Inverse kinematic solution of
robot manipulators using interval analysis.
J. Yang, R. T. Marler, H. K. J. A. K. A.-M. (2004). Multi-
objective optimization for upper body posture predic-
tion. In Albany, NY.
K. Abdel-Malek, J. Yang, W. Y. J. (2004). Human perfor-
mance measures: mathematics.
P. Gill, W. M. and Saunders, A. (2002). Snopt: An sqp
algorithm for large-scale constrained optimization.
Rastegarpanah, A. and Mozafar, S. (2016). Lower limb re-
habilitation using patient data.
R. T. Marler, J. Yang, S. R. K. A.-M.-C. (2009). Use of
multi- objective optimization for digital human pos-
ture prediction.
S. Glowinski, T. K. (Warsaw 2016). An inverse kinematic
algorithm for human leg.
S. Tejomurtula, S. K. (1999). Inverse kinematics in robotics
using neural networks.
S. Tejomurtula, S. K. (2005). Biomechanics and Motor
Control of Human Movement. Wiley, NewYork.
V. Kumar, S. Sen, S. S. D. and Shome, S. (2015). Track-
ing trajectory of a cable-driven robot for lower limb
rehabilitation”, international journal of electrical. In
Proceedings of the 2015 Conference on Advances In
Robotics, India.
W. M. Spong, S. H. and Vidyasagar, M. (2006). Robot mod-
eling and control. ohn Wiley & Sons.
Xie, S. (2016). Advanced Robotics for Medical Rehabilita-
tion.
Z. Mi, Y. Jingzhou, K. A.-M. (2009). Optimization-based
posture prediction for human upper body.
Optimal 3D Kinematic Analysis for Human Lower Limb Rehabilitation
185
