Towards Modeling Adaptation Services for
Large-Scale Distributed Systems with Abstract State Machines
Sorana Tania Nemes
,
and Andreea Buga
Christian Doppler Laboratory for Client-Centric Cloud Computing,
Johannes Kepler University of Linz, Software Park 35, 4232 Hagenberg, Austria
{t.nemes, andreea.buga}@cdcc.faw.jku.at
Keywords:
Formal Modeling, Abstract State Machines, Large-Scale Distributed Systems, Adaptation, Smart City.
Abstract:
The evolution of Large-Scale Distributed Systems favored the development of solutions for smart cities. Such
systems face a high-level of uncertainty as they consist of a large number of sensors, processing centers,
and services deployed along a wide geographical area. Bringing together different resources poses increased
complexity as well as communication efforts, and introduces a large set of possible failures and challenges
of continuously growing computational and storage expectations. In such a frame, the role of the adaptation
components is vital for ensuring availability, reliability, and robustness. This paper introduces a formal ap-
proach for modeling and verifying the properties and behavior of the adaptation framework addressing the
case of a system failure. We formalize the behavior and the collaboration mechanisms between agents of the
system with the aid of Abstract State Machines and employ the ASMETA toolset for simulating and analyzing
properties of the model.
1 INTRODUCTION
Large-scale distributed systems (LDS) have appeared
as a solution to the continuously expanding comput-
ing and storage demands. Services offered through
such architectures bring an increased value to the end
client, but there are still many open questions posed
by issues like heterogeneity, network failures, and
random behavior of components. Recovering from
failures and ensuring a high availability of the sys-
tem requires reliable monitoring and adaptation tech-
niques.
One of the biggest beneficiaries of LDS are the
applications for smart cities, which connect and al-
low the communication of a huge number of sensors
spread along a wide radius. Such systems cover vari-
ous aspects like traffic surveillance, infrastructure and
environment, and aim to ease and improve the quality
of life of inhabitants. These solutions are character-
ized by the same properties as well as failures and
availability issues as any LDS. Therefore, the adapta-
tion component plays a key role in enacting adapta-
tion plans to bring the system to a normal execution
mode.
The goal and contribution of this paper is to in-
tegrate the formal modeling capabilities of the Ab-
stract State Machines (ASMs) for defining and val-
idating an adaptation solution for LDS. Our project
promotes a service-oriented approach to heteroge-
neous, distributed computing that enables on-the-fly
run-time adaptation of the running system based on
the replacement of sets of employed services by alter-
native solutions. For this we develop an advanced ar-
chitecture and an execution model by envisioning and
adapting a wide spectrum of adaptation means such as
re-allocation, service replacement, change of process
plan, etc.
The remainder of the paper is structured as fol-
lows. Section 2 provides an overview of the system
and its architecture, followed by a description of the
structure of the adaptation framework in Section 3.
Essential concepts related to the Abstract State Ma-
chine formal methods as well as the formal specifica-
tion of the adaptation framework are detailed in Sec-
tion 4. Related work is discussed in Section 5, after
which conclusions are drawn in Section 6.
2 SYSTEM OVERVIEW
The evolution of distributed systems, Internet of
Things (IoT) and network capabilities played an im-
portant role in the adoption of ubiquitous solutions
for smart cities. Widely distributed sensors for traffic,
193
P rovider
1
S
11
...
S
1n
...
m
1
...
m
i
m
i+1
...
m
k
P rovider
2
S
21
...
S
2n
...
m
j+1
...
m
k
m
k+1
...
m
l
P rovider
s
S
s1
...
S
sn
m
l+1
...
m
p
m
p+1
...
m
r
Client
Providers
Monitoring Layer
Adaptation Layer
Laptop
Phone
Computer
Abstract Machine
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
——Observe
—— Send
——request
——Reply
C
l
i
e
n
t
-
p
r
o
v
i
d
e
r
i
n
t
e
r
a
c
t
i
o
n
m
i
d
d
l
e
w
a
r
e
R
e
q
u
e
s
t
d
a
t
a
S
u
b
m
i
t
d
a
t
a
Figure 1: Architecture of the LDS system.
pollution, energy efficiency and environment continu-
ously collect data that are integrated in various appli-
cations. The aim is to sustainably develop cities and
improve the quality of life of the the inhabitants.
One of the main areas of interest is provisioning
of traffic services, where centrally-controlled traffic
sensors regulate the flow of traffic through the city
in response to demand. The benefits of such a smart
traffic management application also empowers people
to take informed decisions, and prevent severe traffic
congestion due to overcrowded areas. In a smart city
network, traffic sensors provide real time data related
to the percentage of road occupancy, the number or
traffic participants, just to name a few. Such sensors
are distributed along an LDS and the data they pro-
vide can be integrated with activity patterns extracted
from smart gadgets for building a knowledge base for
a traffic application.
The organization of the solution reflects the struc-
ture of LDS, where nodes refer to sensors and services
are offered by various providers. Such systems are
characterized by heterogeneity, unavailability, insta-
bility, network and node failures. Problems occurring
at component level are propagated to the whole solu-
tion, making it hard to identify the source. We empha-
size the role of the adaptation framework for ensuring
availability of the system and propose a formal model
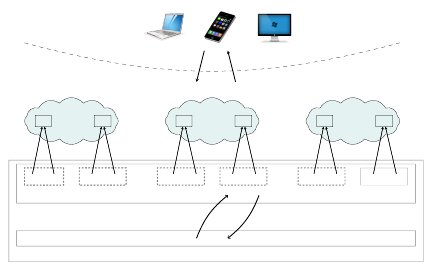
for the solution. Figure 1 illustrates the architecture
of the LDS system for a smart traffic application.
2.1 System Architecture
The envisioned solution proposes distributed middle-
ware components containing different units responsi-
ble for specific tasks: service integration, process op-
timization, communication handler. The core makes
use of ASMs for expressing the specification of the
other components and foresees a three-layered ab-
stract machine model addressing normal processing,
monitoring and adaptation. The organization, as il-
lustrated in Figure 1, is rooted in three parts: the
client side where different users request services from
providers, the side of the providers where sensors
are deployed and an abstract machine containing the
monitoring and adaptation layers for the resources of
the providers. The interaction of the clients with the
service providers is based on a solution defined by
(B
´
osa et al., 2015), where the client-cloud interaction
middleware processes the requests and ensures the de-
livery of services to the end user.
The processes of the monitors and adapters are
highly interconnected and interdependent, enabling
the system to perform reconfiguration plans when-
ever any of the traffic sensors faces a problem. The
monitors are responsible for collecting data, aggre-
gating it into meaningful information and communi-
cating observations about abnormal executions to the
adaptation framework. The latter deals with recov-
ering from anomalous situations, logging them, and
finding the best remedy to restore the LDS to normal
running mode. Diagnosis is strongly correlated with
the high-level interpretation of collected data.
The adoption of LDS demands a deep understand-
ing of the underlying infrastructure, its running mech-
anisms and uncertainties, as services may become un-
available or change, or network problems may impact
negatively on the reliability and performance of the
distributed system (Grozev and Buyya, 2014). De-
livery of reliable services requires a continuous eval-
uation of the system state and adaptation in case of
abnormal execution. Therefore primarily, two aspects
are considered: resilience and fault tolerance. With
respect to resilience the project targets system archi-
tectures that guarantee that a LDS keep running and
producing desired results, even if some services be-
come unavailable, change or break down. With re-
spect to fault tolerance the project targets assessment
methods that permit the detection of failure situations
and adaptive repair mechanisms. Therefore for LDS,
adaptability is a valuable and an almost inevitable
process.
3 ORGANIZATION OF THE
ADAPTATION FRAMEWORK
As aforementioned in section 2, the architecture and
execution model are enhanced to capture dynamic
adaptation of a LDS to changing environmental cir-
cumstances. The Adaptation Engine aims to perpetu-
ally react to the input measurements and notifications
from the monitoring component and maintain its re-
siliency to gracefully handle and adapt to new con-
texts varying from network traffic fluctuations to un-
Seventh International Symposium on Business Modeling and Software Design
194

configuration
Case
Ω
i
.
.
.
Ω
j
.
.
.
Ω
k
Action
Controller
Ω
k
Ω
i
Ω
j
...
Action Workflow
system adaptation
launch
initial action: Ω
k
actionStarted
actionFailed
actionCompleted
handle signals
execute
state(Ω) = active
Figure 2: Overview specification of the Adaptation Manager.
availability of different system components. Its main
measures consist in reacting to and evaluating the data
collected and assessed by the monitoring components
in regards to the detected faults within the system, em-
ploying the repair of the encountered problem under
presumably optimal performance and adjusting the
solution to higher levels of quality compliance.
Standardized repair actions for on-the-fly changes
in reaction to identified critical situations are defined
and will be employed on demand. This will result in
a catalog of possible adaptive collaboration patterns,
each supported by a set of subsequent adaptation tools
and components. Such repair patterns can be the re-
placement of a component service by an equivalent
one or the change of location for a service, up to the
replacement of larger parts of the LDS, i.e. a set of
services involved, by a completely different, alterna-
tive solution.
These steps in the adaptation process highlight
the two major components that make up the Adap-
tation Engine as an inner component of the abstract
machine included in the middleware: solution explo-
ration, identification and maintenance carried out by
the Case Manager, and solution management and en-
actment processed by the Action Manager. Each con-
stituent component runs with well delimited respon-
sibilities and areas of inference and control. The cur-
rent paper focuses on the second part of adaptation,
the Action Manager.
In the envisioned framework, any adaptation so-
lution is configured and stored in the repository as a
workflow schema detailing the actions and underlying
transition dependencies needed to restore the system
to a normal execution mode.
An action is an autonomous entity (e.g. a software
module) which has the power to act or cause a single
update to the system. Its autonomy implies that its
processes are neither controlled by other actions, nor
are they controlled by the environment. The power of
such autonomous and self-aware actions lies in their
ability to deal with unpredictable, dynamically chang-
ing, heterogeneous environments while relying fully
on existing solutions for LDS adaptability. Given
the situation of replacing one service with another,
one such action would encompass finding a suitable
matching service to replace the problematic one (by
accessing the capabilities of an existing tool) or dy-
namically reconfigure the service calls to the new in
use service.
The action’s instantiation and execution are han-
dled by linked ActionController loaded based on the
defined contract for that particular action. The ac-
tions’ ordering and dependency on other actions is
handled by means of notification/signaling, where ev-
ery action state change would imply for the parent
ActionController to broadcast the associated notifica-
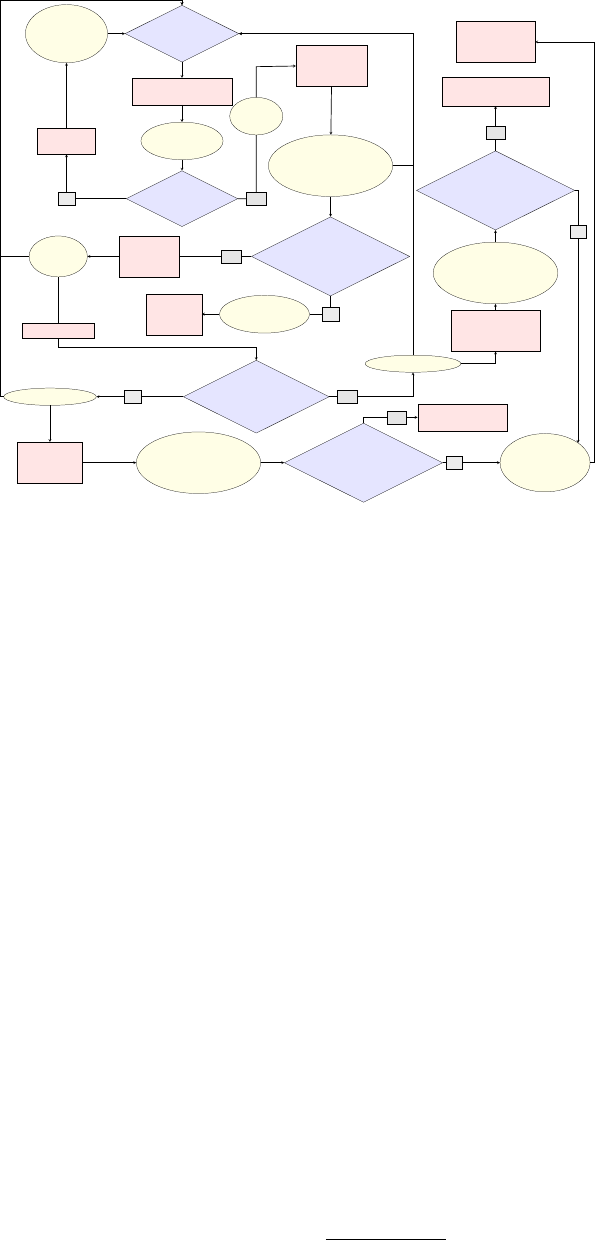
tion. Figure 2 depicts the overall structure of the adap-
tation process once the problem is mapped to previ-
ous encountered problems and the attached solution
is carried out based on its configuration.
Therefore, the adaptation system consists of a fi-
nite set of autonomous, interacting Action Controllers
that intercept and assess all the raised notifications
triggered by actions’ execution or failure. The assess-
ment implies either enacting and executing its cor-
responding action, or ignoring the notification as it
is not of interest in the given solution configuration.
Having Action Controllers to monitor and handle the
interaction between the actions of a solution, it em-
phasizes new properties of the actions being defined
in terms of needed input, concrete implementation
and resulting output. More importantly, the under-
lining actions can be easily reused or substituted by
enabling the possibility to add or remove any given
number of actions without the need to update the cur-
rent actions.
The model’s underlining observer/controller ar-
chitecture is one realization of the feedback loop prin-
ciple (Brun et al., 2009): the executing adaptation is
observed by its registered controllers, which in turn,
based on the reported observations and broadcast no-
tifications, affect the system towards the remedia-
tion of the reported problem/failure. An environmen-
tal change resulted from the execution of an adapta-
tion action triggers a reaction within the system that
causes, in return, a configuration-based chain of sub-
sequent changes. These loops guide the system be-
havior and dynamics for the adaptation to succeed in
reaching the intended goals.
In order to better understand the intrinsic prob-
lems that the framework can face, we focused our at-
tention on building ground models in terms of ASMs.
Based on them we can validate the specifications and
verify if they fulfill desired properties as safety and
liveness.
Towards Modeling Adaptation Services for Large-Scale Distributed Systems with Abstract State Machines
195
Passive
Waiting
notification
Notification
received
Acknowledge
notification received
Assess
notification
Handle
notification
YesNo
Ignore
notification
Action
started
Broadcast
ActionStarted
notification
Waiting for
ActionStarted
acknowledgement
ActionStarted
acknowledged by all
Yes
No
Terminate
adaptation
execution
Adaptation
not initiated
Clear
StartAction
echo
Action
running
Trigger action
Action
successfully
completed
Yes
Action active
Broadcast
ActionCompleted
notification
Waiting for
ActionCompleted
acknowledgement
ActionCompleted
acknowledged by all
Yes
Clear
CompleteAction echo
No
Controller
acknowledge
failed
No
Action failed
Broadcast
ActionFailed
notification
Waiting for
ActionFailed
acknowledgement
ActionFailed
acknowledged by all
Yes
Clear
FailedAction echo
No
Assess
component
data and status
Figure 3: Control ASM for the Action Controller agent.
4 FORMAL SPECIFICATION OF
THE SYSTEM
4.1 Background on ASM Theory
According to (Kossak and Mashkoor, 2016), ASMs
stood out as a high-quality software engineering
method for behavioral and architectural system design
and analysis. By further considering the assistance of
the model through the expressiveness of the specifica-
tion, the software development process, its coherence
and the scalability in industrial applications (Kossak
and Mashkoor, 2016) we adopted the ASM method.
The specification of an ASM consists of a finite
set of transition rules of the type: if Condition then
Updates (B
¨
orger and Stark, 2003), where an Update
consists of a finite set of assignment f(t
1
, ..., t
n
) := t.
As ASMs allow synchronous parallelism execution,
two machines might try to change a location with two
different values, triggering an inconsistency. In this
case the execution throws an error.
Rules consist of different control structures that
reflect parallelism (par), sequentiality (seq), causal-
ity (if...then) and inclusion to different domains
(in). With the forall expression, a machine can en-
force concurrent execution of a rule R for every el-
ement x that satisfies a condition ϕ: forall x with
ϕ do R. Non-determinism is expressed through the
choose rule: choose x with ϕ do R.
Definition 1. A control state ASM is an ASM built
on the following rules : any control state i verifies
at most one true guard, cond
k
, triggering, thus, rule
k
and moving from state i to state s
k
. In case no guard
is fulfilled, the machine does not perform any action.
In the design phase of software development,
ASM technique permits transforming the require-
ments from natural language to ground models, and
further to control state diagrams, that are easier to for-
malize. ASMETA
1
toolset for simulating, validating
and model-checking ASM models, permits elaborat-
ing the models with the aid of the AsmetaL language,
which is able to capture specific ASM control struc-
tures and functions. The models are further simulated
and validated for inconsistencies. The tool permits
also automatic review of the model for properties like
conciseness or faultiness or for design issues. In the
verification stage, properties like reachability, safety
and liveness are defined and checked.
4.2 ASM Specification
Based on the overall specification of the adaptation
framework mentioned in Section 3, we define the spe-
cific states and transitions of the adaptation processes,
with emphasis on the management and enactment of
1
http://asmeta.sourceforge.net/
Seventh International Symposium on Business Modeling and Software Design
196
adaptation actions. The model contains ActionCon-
troller ASM agents, each of which carrying out its
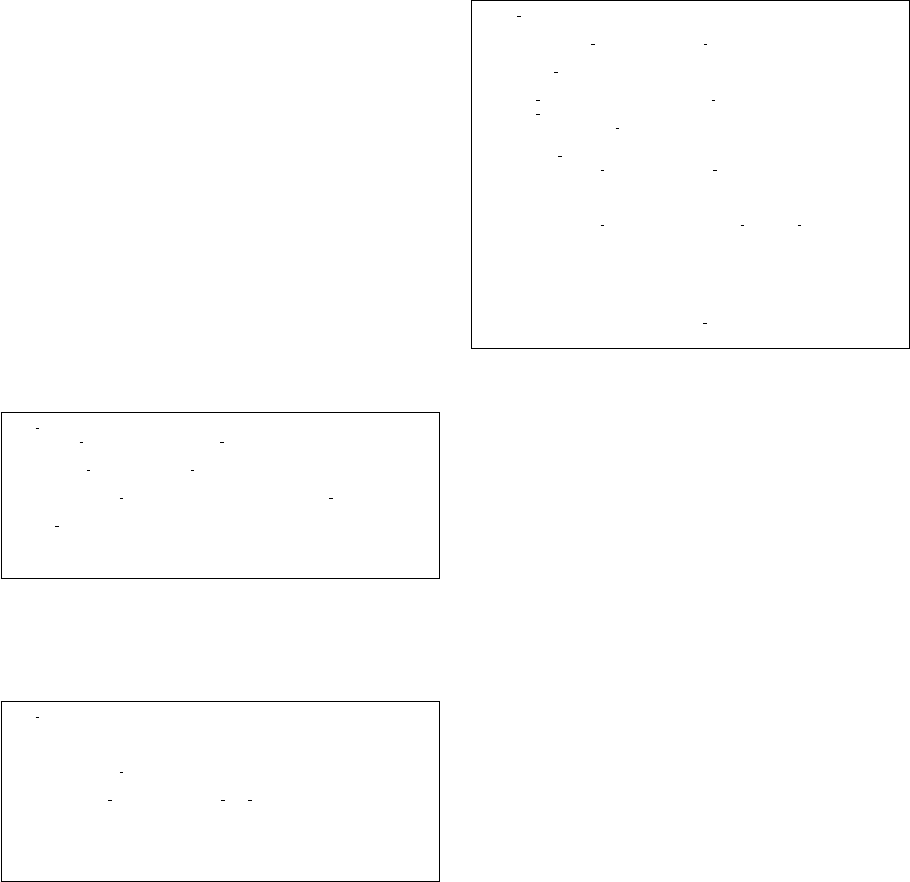
own execution. The ground model illustrated in Fig-
ure 3 details the behavior of an ActionController in re-
lation to the received and broadcast notifications. The
ActionController can pass through several states by
various rules and guards.
At initialization, the ActionController is in the
Passive, Waiting notification state. This initial state
is reached again either when the associated action’s
execution and acknowledgment by all the other con-
trollers are fulfilled or when the received notifica-
tion is not bound to influence the ActionController in
question. This is a clear indication of the continuous
character of the adaptation process which takes place
in the background of service execution.
Once a notification arises, the ActionController
acknowledges the received notification in disregard of
the actual sender, after which it moves to the Assess
notification state. The rule responsible for acknowl-
edging a notification is captured in Listing 1.
rule r AcknowledgeNotificationReceived($c in Controller,$broadcaster in Controller) =
if (controller state($c) = NOTIFICATION RECEIVED) then
seq
controller state($c) := ASSESS NOTIFICATION
par
acknowledged controllers($broadcaster) := acknowledged controllers(
$broadcaster) + 1
r HandleNotification[$c]
endpar
endseq
endif
Listing 1: Acknowledge notification ASM rule.
Handling the received notification implies to broad-
cast first the notification that the action execution is
bound to start, as captured in Listing 2.
rule r BroadcastNotification($c in Controller, $n in Notification) =
forall ($neighbor in Controller) then
if (not(id($c) = id($neighbor))
seq
acknowledged controllers($c) := 1
par
controller state($c) := WAITING FOR ACKNOWLEDGEMENT
AcknowledgeNotificationReceived[$neighbor, $c]
endpar
endseq
endif
endforall
Listing 2: Broadcast notification ASM rule.
The controller must act on executing the underly-
ing action only once the notification is acknowledged
by all neighboring ActionControllers which were in-
stantiated as part of the same adaptation session. De-
pending on the output of the executed action, one no-
tification will be broadcast signaling the success or
failure of this particular system update. As there is
no linked track of the ActionControllers’ order to ex-
ecution, if at least one ActionController does not ac-
knowledge any of the sent notifications, the adapta-
tion is abruptly terminated and the component data
and status are assessed and logged accordingly. The
rule responsible for triggering the associated adapta-
tion action is captured partially in Listing 3.
rule r TriggerAction($c in Controller) =
seq
while (controller state($c) = RUNNING ACTION)
wait
if (action completed($c))
par
r BroadcastNotification[$c, ACTION COMPLETED]
r AwaitAcknowledgement[$c]
if (acknowledged controllers($n) = numberOfControllers)
par
r ClearNotificationEcho[$c]
controller state($c) := WAITING NOTIFICATION
endpar
else
par
controller state($c) := CONTROLLER ACKNOW FAILED
AssessDataAndStatus
endpar
endif
endpar
else
par
BroadcastNotification[$c, ACTION FAILED]
...
Listing 3: Trigger action ASM rule.
4.3 Validation of the Model
The validation for the current state of our work deals
only with the separate processes for each agent. It
focuses on checking the work ow and the transitions
from different states. AsmetaV tool permits valida-
tion of specific scenarios defined with the aid of the
Avalla language presented by (Carioni et al., 2008).
Scenarios resemble the unit tests performed during
the software testing development phase. They capture
execution flows given specific values to functions of
the system.
One of the problems we identified during the val-
idation phase was that the Avalla language does not
support working with infinite domains. Therefore,
we needed to consider that each ActionController re-
members only one Notification instance. Other incon-
sistency errors detected at simulation time led to de-
sign changes or restrictions.
More than one system failure can be reported in
a short time frame. Therefore, the failure recovery
part is done in a sequential mode because, although
the case/reconfiguration plan is locked while it’s as-
sociated solution is executed, a parallel execution of
simultaneous adaptations may try to update system
parts or components with different values at the same
time. We leave as a future work the elaboration of
transaction specific operations, which would permit
triggering simultaneously multiple adaptions within
the system. This could be supported by annotating
the case with extensive knowledge on the area of in-
ference in the system of each case, which would later
on be considered in the retrieval phase of the process.
Towards Modeling Adaptation Services for Large-Scale Distributed Systems with Abstract State Machines
197
5 RELATED WORK
Research in software adaptation ranges from the de-
velopment of generic architectural frameworks to
specific middleware using component frameworks
and reflective technologies for specialized domains.
Mechanisms proposed include: DA by generic in-
terceptors (Sadjani, 2004), which do not mod-
ify a component’s behavior, but intercept messages
between components; DA with aspect-orientation
(Yang, 2002); parametric adaptation (Pellegrini.,
2003) or dynamic reconfiguration by means of ad-
justing or fine-tuning predefined parameters in soft-
ware entities; dynamic linking of components (Es-
coffier and Hall, 2007); and model-driven develop-
ment (Zhang and Cheng, 2006).
However, while existing techniques offer a wide
range of options to achieve different degrees of DA,
questions related to the identification and soundness
of a given adaptation model are still open. Formal
methods grant clearer definitions and precision for the
adaptation framework. Our project focuses on how to
extend and build on this previous research while spec-
ifying and validating LDS specific requirements like
on-the-fly reaction to change, loss or addition of re-
sources. We consulted the area of formal methods and
chose the ASM technique proposed and exemplified
in various industrial examples by (B
¨
orger and Stark,
2003).
Modeling LDS has been addressed in several
cloud and grid related projects. The ASM technique
contributed to the description of the job management
and service execution in (Bianchi et al., 2013). Speci-
fication of grids in terms of ASMs have been proposed
also by (N
´
emeth and Sunderam, 2002), where the au-
thors focused on expressing differences between grid
and traditional distributed systems.
6 CONCLUSIONS
The current paper proposes an approach for achieving
a reliable adaptation solution for LDS. By employing
the ASM formal method we analyze the properties of
the model and identify reasoning flaws. The knowl-
edge scheme presented in the paper supports adapta-
tion related processes and is reflected in the model.
We analyzed the model with the aid of the AsmetaV
tool and validated the reliability of some of our mod-
els when executing an adaptation solution.
In the future steps of our work we aim to enhance
the models and express their properties in terms of
CTL logic, which is supported by the Asmeta toolset.
By these means, faults and drawbacks of the proposal
can be identified and corrected.
REFERENCES
Bianchi, A., Manelli, L., and Pizzutilo, S. (2013). An ASM-
based Model for Grid Job Management. Informatica
(Slovenia), 37(3):295–306.
B
¨
orger, E. and Stark, R. F. (2003). Abstract State Machines:
A Method for High-Level System Design and Analysis.
Springer-Verlag New York, Inc., Secaucus, NJ, USA.
B
´
osa, K., Holom, R., and Vleju, M. B. (2015). A formal
model of client-cloud interaction. In Correct Software
in Web Applications and Web Services, pages 83–144.
Brun, Y., Marzo Serugendo, G., Gacek, C., Giese, H.,
Kienle, H., Litoiu, M., M
¨
uller, H., Pezz
`
e, M., and
Shaw, M. (2009). Software engineering for self-
adaptive systems. chapter Engineering Self-Adaptive
Systems Through Feedback Loops, pages 48–70.
Springer-Verlag, Berlin, Heidelberg.
Carioni, A., Gargantini, A., Riccobene, E., and Scandurra,
P. (2008). A scenario-based validation language for
asms. In Proceedings of the 1st International Confer-
ence on Abstract State Machines, B and Z, ABZ ’08,
pages 71–84, Berlin, Heidelberg. Springer-Verlag.
Escoffier, C. and Hall, R. S. (2007). Dynamically Adaptable
Applications with iPOJO Service Components, pages
113–128. Springer Berlin Heidelberg, Berlin, Heidel-
berg.
Grozev, N. and Buyya, R. (2014). Inter-cloud architec-
tures and application brokering: taxonomy and survey.
Softw., Pract. Exper., 44(3):369–390.
Kossak, F. and Mashkoor, A. (2016). How to Select the
Suitable Formal Method foran Industrial Application:
A Survey, pages 213–228. Springer International Pub-
lishing, Cham.
N
´
emeth, Z. N. and Sunderam, V. (2002). A For-
mal Framework for Defining Grid Systems. 2014
14th IEEE/ACM International Symposium on Cluster,
Cloud and Grid Computing, 0:202.
Pellegrini., M.-C., R. M. (2003). Component management
in a dynamic architecture. The Journal of Supercom-
puting, 24(2):151–159.
Sadjani, S., M. P. (2004). An adaptive corba template to
support unanticipated adaption. In International Con-
ference on Distributed Computing Systems, pages 74–
83.
Yang, Z., C. B. S. R. S. J. S. S. M. P. (2002). An aspect-
oriented approach to dynamic adaptation. WOSS,
pages 85–92.
Zhang, J. and Cheng, B. H. C. (2006). Model-based devel-
opment of dynamically adaptive software. In Proceed-
ings of the 28th International Conference on Software
Engineering, ICSE ’06, pages 371–380, New York,
NY, USA. ACM.
Seventh International Symposium on Business Modeling and Software Design
198
