
A Neuro-Fuzzy Sugeno-Style HVAC Control System for Balancing
Thermal Comfort and Energy Consumption
Hoba H. Bakr, Nawzad K. Al-Salihi and Oussama H. Hamid
Department of Computer Science and Engineering, University of Kurdistan Hewl
ˆ
er, Kurdistan Region, Iraq
Keywords:
Neuro-Fuzzy Controller, HVAC Control Systems, Thermal Comfort, Indoor Environment Quality, Energy
Consumption.
Abstract:
Thermal comfort is an environmental state, in which humans enjoy calefactory conditions while being indoor
and wearing a normal amount of clothing. To achieve this, the indoor environment’s temperature should be
adjusted in accordance with the temperature variations of the outdoor space, taking into account the resulting
energy costs. We studied this problem by designing a neuro-fuzzy HVAC control system that provides a
higher indoor environment comfort while decreasing the corresponding energy consumption. Our controller
utilizes a Sugeno-style fuzzy inference system with two sensory inputs: one for temperature and another for
occupants’ motion. It outputs a signal that represents the mode of the air conditioner and the compressor
speed. Simulation results showed that the air conditioner turns off automatically after 10 minutes of the last
detected motion. Furthermore, running the simulations for the energy consumption and resulting costs, both
variables were shown to fall in the absence of occupants’ motion.
1 INTRODUCTION
‘Thermal comfort’ describes an environmental
state, in which a human individual does not suf-
fer from cold or hot temperatures while being
indoor and wearing a normal amount of clothing
(Canadian Centre for Occupational Health and Safety,
2017). Such a state is important for peoples’ health
and is expected to increase their personal satis-
faction and work productivity. Moreover, out of
practical rationale, it is recommended to set the
temperature in winter between 21
◦
C and 23
◦
C while
in summer it should be set at warmer temperature
to decrease the flowing of heat from outdoors to
indoors so as to save energy. These temperature
settings have been confirmed to meet the needs
of 80% of people and, hence, are recommended
by American Society of Heating, Refrigerat-
ing, and Air Conditioning Engineers (ASHRAE)
(Canadian Centre for Occupational Health and Safety,
2017).
Heating, ventilating, and air conditioning (HVAC)
is a control technology that aims at improving indoor
environment quality by increasing thermal comfort
while decreasing energy consumption (Nowak and
Urbaniak, 2016). Traditional approaches to regulate
the operations of an HVAC system include the use of
‘on-off’ and ‘Proportional Integral Derivative’ (PID)
controllers.
On-off controllers are the most intuitive and sim-
plest of control techniques. They regulate the under-
lying process by adjusting the temperature differential
between two set values ‘low’ and ‘high’ with respect
to the desired room temperature. A control process
that underlies the on-off principle leads to a rise of
room temperature when the heating signal is on (it
falls in case of cooling signal) until it hits the value
‘high’. The control signal then turns off and the tem-
perature starts falling (it rises in case of cooling) un-
til it reaches the value ‘low’. Though easy to imple-
ment, control processes utilizing an on-off controller
display large fluctuations of temperature and are in-
capable to control processes with time delays (Afram
and Janabi-Sharifi, 2014).
PID controllers were developed to reduce the im-
pact of fluctuations caused by on-off control pro-
cesses (Song et al., 2015). They achieve accurate
control by utilizing error dynamics related to the con-
trolled variable. Despite their relatively promising
results, PID controllers, however, need to be fre-
quently tuned in accordance with the operating con-
ditions. This could be time consuming (Wang et al.,
2001). Otherwise, performance of the controller will
decrease. Moreover, embedding an auto-tuning com-
H. Bakr H., K. Al-Salihi N. and H. Hamid O.
A Neuro-Fuzzy Sugeno-Style HVAC Control System for Balancing Thermal Comfort and Energy Consumption.
DOI: 10.5220/0006558904190426
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
ponent (e.g. the Ziegler-Nichols method (Ziegler and
Nichols, 1942)) might be helpful for moderating the
time complexity given a realistic modeling of the un-
derlying process (
˚
Astr
¨
om and H
¨
agglund, 1984), (Bi
et al., 2000). But it doesn’t work in all applications
(Salsbury, 2005).
Because of the different influences on the over-
all quality of indoor environment, an HVAC control
system has to interrelate several input variables into
another set of outputs (Mirinejad et al., 2012). This
requires the system to treat numerous elements of un-
certainty. Historically, uncertainty has been dealt with
by probability theory. Though powerful, probability
theory, however, serves well in modeling situations
where the primary source of uncertainty is random-
ness (Jaynes, 2003). Other sources of uncertainty
such as vagueness, similarity, or preference as op-
posed to ambiguity can be dealt with adequately by
emulating human cognitive and decision-making pro-
cesses. The theory of ‘fuzzy logic’ provides a natu-
ral framework to handle uncertainty in a natural way.
Here, instead of asking whether something is true, we
ask how much it is true (Keller et al., 2016).
Research on HVAC control systems has correlated
the effectiveness of the PID controllers with the nat-
uralness of the fuzzy logic approaches. For exam-
ple, Mohindru and Sharma found that a fuzzy con-
troller with two input signals, one for error and an-
other denoting the rate of change along with seven
membership functions, performed better than a fine-
tuned Ziegler-Nichols-style PID controller (Mohin-
dru and Sharma, 2015). This result was supported
by other studies that showed the fuzzy logic con-
trollers’ ability to adapt to longer time delays (Kobersi
et al., 2013), reduce energy consumption (Dash et al.,
2012), and/or provide thermal comfort (Collotta et al.,
2014).
In the present work, we set out solve the prob-
lem of achieving thermal comfort with possibly re-
duced energy consumption. To this end, we designed
a neuro-fuzzy controller that combines neural net-
works’ ability of generalization (Gl
¨
uge et al., 2010)
and the human-like inference within of the fuzzy logic
framework (Keller et al., 2016). Combining informa-
tion from multiple sensory sources has been shown to
facilitate human decision making (Hamid et al., 2010)
and model’s performance (Hamid, 2015). Our con-
troller achieves a higher indoor environment quality
by balancing thermal comfort and energy consump-
tion. The underlying model of the proposed controller
utilizes a Sugeno-style fuzzy inference system with
two sensory inputs: one for temperature and another
for motion. It outputs a signal that represents the
mode of the air conditioner and the compressor speed
Figure 1: Room geometry.
for each mode. The testing of the controller showed
that the air conditioner of the controlled HVAC sys-
tem turns off automatically 10 minutes after the last
detected motion of room occupants. Accordingly,
simulations of the cost levels and energy consump-
tion were shown to fall when the room was empty as
justified through the absence of occupants’ motion.
The remainder of the paper is organised as fol-
lows. Section 2 introduces the designed neuro-fuzzy
controller and its underlying mathematical model for
regulating room temperature. In section 3, we discuss
the considered simulation scenarios. Results are pre-
sented and discussed in section 4. We finally conclude
and portray our plans for future work in section 5.
2 METHODS AND ANALYSIS
2.1 Mathematical Modeling of Indoor
Air Temperature
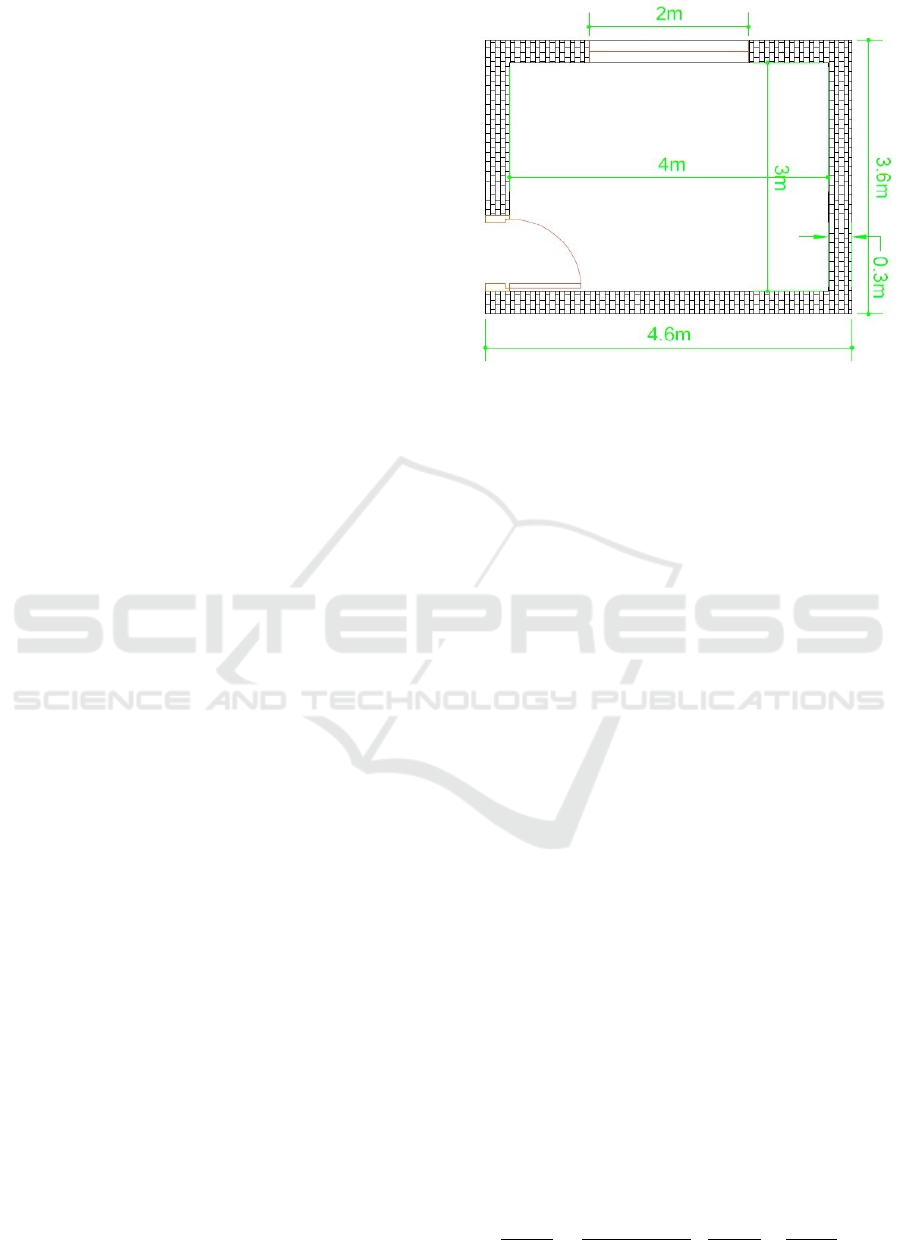
Controlling the temperature of an indoor environment
can be affected by various factors including the geom-
etry of the indoor environment as well as the environ-
mental conditions of the corresponding outdoor sur-
roundings. Figure 1 shows the geometric characteris-
tics of the room that served for the control task in our
work. The heating and cooling of the room tempera-
ture is affected by the efficiency of the air conditioner,
the volume of the room, the heat loss and heat gain in
winter and summer, respectively. The rate of temper-
ature change of the monitored room can be computed
by:
dT
room
dt
=
1
m
room−air
.c
air
dQ
gain
dt
−
dQ
loss
dt
(1)

where dT
room
/dt denotes the rate of thermal variation,
which is transferred to the room from the air condi-
tioner, in terms of the discrepancy between the rate
of energy gain Q
gain
and that of energy loss Q
loss
(in
joules per seconds). According to Eq. (1), the amount
of transferred thermal energy will cool down or heat
up the room depending on the constant mass of the
air (in kilogram) of the monitored room (m
room−air
)
and specific heat capacity (c
air
) in (joule/kilogram
degree). The specific heat capacity of air (c
air
) in
(joule/kilogram degree) for both 20
◦
C and 25
◦
C as
initial room temperature is 1005 joule/kilogram de-
grees. Moreover, the mass of the room’s air m
room−air
depends on air density ρ (in kg/m
3
) and the volume V
(in m
3
) of the room. Hence, the mass of the room’s
air can be computed as follows.
m
room−air
= ρ.V (2)
We chose ρ = 1.225 kg/m
3
of the standard atmo-
sphere, which is the value of air density at sea level
and at 15
◦
C (McCormick, 1995), (Cavcar, 2000). The
volume of the room is 36 m
3
. Lastly, the energy loss,
that is dQ
loss
/dt, is computed from
dQ
loss
dt
=
κA(T
room
− T
outside
)
D
(3)
Here, κ is the thermal conductivity (in Joule/sec/m
◦
C)
of the insulation materials to conduct energy trans-
fer. It is 0.72 Joule/sec/m
◦
for common brick, 0.78
Joule/sec/m
◦
for glass window, and 0.8 Joule/sec/m
◦
for concrete roof. The term A in Eq. (3) refers to the
area. We considered three areas in our calculations,
the area of the window A
window
, that of the roof A
roo f
,
and the area of the wall A
wall
. Finally, D in Eq. (3)
represents the thickness of the common brick, dou-
ble glazed window, and concrete roof, which is in our
case 0.3m, 0.01m, and 0.25m, respectively.
Figure 2: Architecture of the neuro-fuzzy system.
2.2 Modeling the Air Conditioner
Selecting the right size of an air conditioner is crucial
for optimizing energy consumption. For example, a
bigger sized air conditioner may cool a room faster
than a smaller one, but it consumes more energy.
On the other hand, choosing the right size of an air
conditioner is bedeviled by some factors such as
the area and the volume of the room, the number of
occupants, the local climate, shading, and the size
of windows inside the room. All the same, there
is a set of rules that can be used to estimate the
proper capacity of an air conditioner. To regulate
the room temperature described in Section 2.1, we
considered a one ton air conditioner, which corre-
sponds to 3516 Joules/second of energy consumption
(Air Conditioning Systems, 2017). The compressor
speed for heating and cooling within the air condi-
tioner is not limited to certain values of electricity
usage. This implies that the working power of the
compressor varies according to the difference be-
tween the actual and the desired temperatures (Song
et al., 2015). This allows adjusting the compressor
to the desired capacity and operating conditions
(Engineering 360 Powered by IEEE GlobalSpec,
2017). Thus, the air conditioner will not work with
its maximum amount of energy when there is a
small amount of differences present between actual
temperature of the room and the desired temperature.
2.3 The Neuro-Fuzzy Controller
We modeled the air conditioning using a neuro-fuzzy
control system as developed by ANFIS toolbox in
Matlab. Figure 2 shows the general architecture of
the devised neuro-fuzzy. It consists of five layers with
following specifications. The first layer corresponds
to input variables, the second layer represents input
membership functions (inputmf), the third layer refers
to the rule base, the fourth layer is denotes the out-
put membership functions, and the fifth layer refers
to the output variable. Importantly, our model utilizes
a fuzzy inference system (FIS) with two sensory in-
puts: one for temperature and another for motion. It
then produces an output signal that controls the com-
pressor speed. Specifically, the first input, termed as
‘input1’, corresponds to the error that results from the
discrepancy between the desired and the actual room
temperatures. The second input, referred to as ‘in-
put2’, models the room occupancy, that is, whether or
not the sensor detects motion in the room. The out-
put represents the mode of the air conditioner and the
compressor speed for each input combination. The
error input has three trapezoidal membership func-

Figure 3: Modeling the Neuro-Fuzzy Controller with Matlab ANFIS toolbox.
tions, the motion input has two trapezoidal member-
ship functions, and the output has six membership
functions. We tested the devised FIS with different in-
put combinations, ranging from -9.531
◦
C to 3.242
◦
C
for ‘input1’ and from 0 to 1 for ‘input2’ as illustrated
in the upper left and upper right plots of Fig. 3, re-
spectively). The range of output membership func-
tion lies within the interval [-65, 65] as shown in the
bottom left plot of Fig. 3. Finally, the rule base of a
Sugeno-style FIS is demonstrated in the bottom right
plot of Fig. 3.
2.4 Cost Calculation
Total energy cost was calculated as the product of the
amount of energy consumed and the cost for one en-
ergy unit. The amount of energy consumed in time
unit is computed from
dQ
dt
= Q.t (4)
with Q representing the energy in Joule unit and t re-
ferring to time in seconds.
3 SIMULATION SCENARIOS
Once the devised neuro-fuzzy controller is setup, the
simulation for regulating room temperature can start.
We set our target temperatures at 22
◦
C for winter and
24
◦
C for summer. Our choice of these temperature
values was motivated by research results on ‘thermal
comfort’ (Caldo, 2015) and international standards
along with a sense of practical rationale. A place with
relatively high temperature will cause its occupants to
feel tired and exhausted, whereas they will become
restless and distracted, if the temperature is relatively
low. Consequently, the simulation runs with the tar-
get temperatures of 22
◦
C for winter and 24
◦
for sum-
mer. We used different initial room temperature at the
start of the simulation for summer and winter. Tem-
perature variation is generated from the differences
between the current and the desired room tempera-
tures. Once the rate of temperature differences are fed
into the controller, the system outputs the mode of the
air conditioning, which will be selected automatically,
and the amount of energy given to the air conditioner
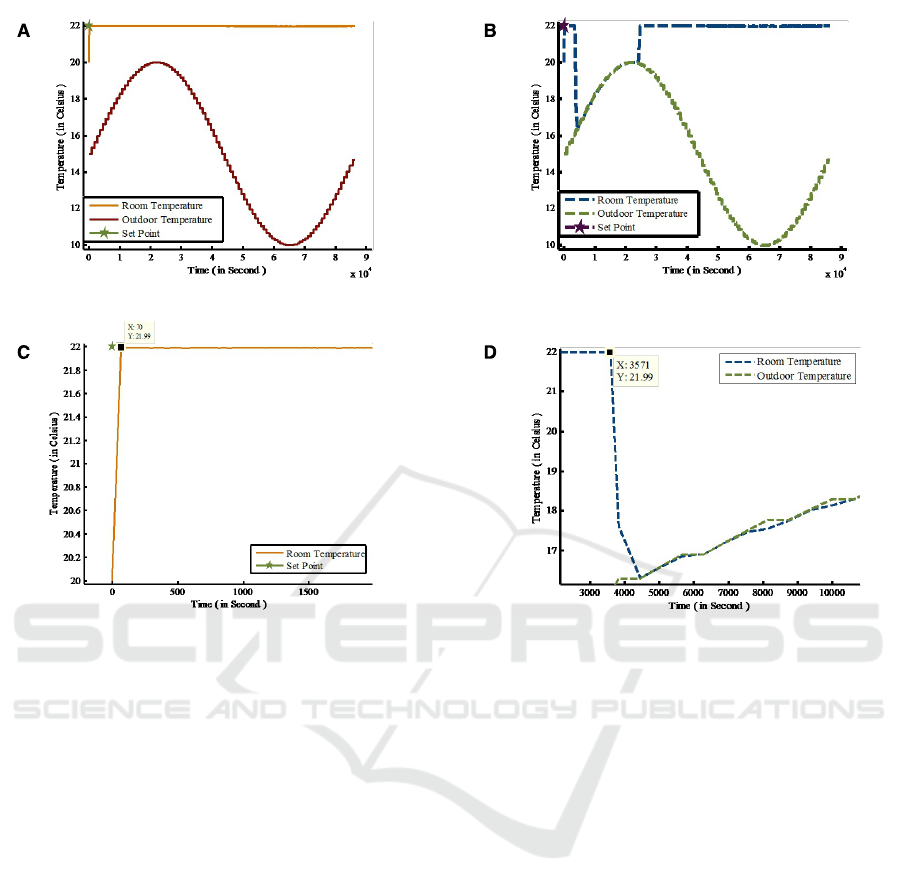
Figure 4: Simulation results. The first column corresponds to the presence of motion, whereas the second simulates the
absence of motion. In each column, the rows from up to down show the neuro-fuzzy controller’s output response and the
controller’s speed.
to control the compressor speed. The second input,
which represents the signal provided by the motion
sensor, detects whether there is moving occupants to
ensure that the air conditioner turns on only if there
is motion and off 10 minutes after the last observed
motion.
4 SIMULATION RESULTS OF
THE NEURO-FUZZY
CONTROLLER
4.1 In The Presence of Motion
Simulation results of the neuro-fuzzy controller in
the presence of motion are shown in the first subplot
columns of figures 4 and 5. Subplot A of figure 4
represents the indoor temperature change according
to the outdoor temperature and the target temperature.
The starting indoor temperature is 20
◦
C for simulat-
ing the outdoor temperature in winter. The system
starts at 08:00 AM and the indoor temperature raised
fast by 70 seconds and was brought to around the set
point of 22
◦
C as it is shown in subplot C of figure 4.
This time for reaching the set point will be shorter if
the initial indoor temperature is higher or the target
temperature is lower. The lower target temperature is
easier to achieve since it is closer to the outdoor tem-
perature whenever the system is starting to work. This
means that the room temperature is well controlled
by the proposed neuro-fuzzy controller. Then the in-
door temperature remains relatively steady and keeps
around the set point. However, there is a tempera-
ture fluctuation which is because of the outdoor tem-
perature reaches to the lowest temperature during this
time periods or evening time. As a result of that the
conduction of heating flow from indoor to outdoor is
increasing but the controller has the capability of reg-
ulating room temperature. Therefore, there are some
variations due to outdoor temperature during 24 hours
or 86400 seconds. Although the proposed intelligent
temperature controller is able to rise the indoor tem-
perature back to the set point, there is a small fluc-
tuation occurred which is variant between 21.98 and
21.99.
While providing a comfortable indoor tempera-
ture, it is important to consume less energy. The more

Figure 5: Simulation results. The first column corresponds to the presence of motion, whereas the second simulates the
absence of motion. In each column, the rows from up to down show the amount of energy consumed by the controller and the
corresponding total cost.
energy consumed will result in increasing the emis-
sion of greenhouse gases like carbon dioxide. The
validation of the neuro-fuzzy controller according to
energy consumption is shown in subplot A of figure
5. The measurements indicate that the maximum of
energy is consumed when there is a huge difference
between indoor temperature which is affected by out-
door temperature and set temperature. On the other
hand, the energy consumed decreases when the sys-
tem is relatively steady, since the variation of temper-
ature has decreased. This is applied in the first period
of the day which is from 08:00 AM to 08:00 PM or
every twelve hours of a day. Therefore, the variation
of the amount of energy consumed will results in the
variation of electric power consumed. The amount of
consumed electricity over a specific time period is the
cost of consumed energy. As we can see in subplot C
of figure 5, the cost of electric power is stable during
the period of (08:00 AM) to (08:00 PM) which indi-
cates the period of saved energy. On the other hand, in
the period between the (08:00 PM) to (08:00 AM) the
cost increases because of the increasing energy con-
sumption. This results in a total cost of energy con-
sumption of $3.412.
4.2 In the Absence of Motion
Analogously, the simulation results in the absence of
occupants’ motion are given in the second subplot
columns of figures 4 and 5. Specifically, the system
is tested for assuming that there is no motion in the
room in the period from 2938 seconds to 29978 sec-
onds while the set point temperature is 22
◦
C (subplot
B of figure 4). The HVAC system will turn off after
10 minutes or 600 seconds at point 3538 seconds of
no occupants in the room. On the other hand, as soon
as the room is occupied at 29978 seconds, the air con-
ditioning system will start to work and it controls the
indoor temperature to be back on track of rising up
to reach the set point. The measurements shown in
subplot D of figure 4 illustrate that the system will
cool down or reach around the outdoor temperature
of about 16
◦
C by 867 seconds. Nevertheless, there
are some small differences between the outdoor and
indoor temperatures because of the wall and window
insulations.
Importantly, one of the aims of our controller’s
design is to automatically turn off the air conditioner
when there is no occupants, so as to save energy and

decrease the cost of electricity used. The result of sav-
ing energy can be seen clearly in subplot B of figure
5. When there is no room occupancy, the amount of
energy consumed becomes zero. As a result,the total
cost of electricity decreases to $3 as shown in subplot
D of figure 5.
5 CONCLUSIONS
We have designed a neuro-fuzzy HVAC control sys-
tem for regulating room temperature. Our controller
achieves a higher indoor environment quality by bal-
ancing thermal comfort and energy consumption. The
underlying model of the proposed controller utilizes
a Sugeno-style fuzzy inference system with two sen-
sory inputs: one for temperature and another for mo-
tion. It outputs a signal that represents the mode of
the air conditioner and the compressor speed for each
mode. The testing of the controller showed that the air
conditioner of the controlled HVAC system turns off
automatically 10 minutes after the last detected mo-
tion of room occupants. Accordingly, simulations of
the cost levels and energy consumption were shown
when the room was empty as justified through the ab-
sence of occupants’ motion.
For the future, we aim at expanding the number
of environmental factors to be considered compared
with only one variable, that is, the room temperature
in the current analysis. Also, we shall deploy the con-
troller to monitor a whole house rather than merely
one room.
ACKNOWLEDGEMENTS
The authors would like to thank the anonymous re-
viewers for their valuable time and helpful comments.
REFERENCES
Afram, A. and Janabi-Sharifi, F. (2014). Theory and ap-
plications of hvac control systems–a review of model
predictive control (mpc). Building and Environment,
72:343–355.
˚
Astr
¨
om, K. J. and H
¨
agglund, T. (1984). Automatic tuning
of simple regulators with specifications on phase and
amplitude margins. Automatica, 20(5):645–651.
Bi, Q., Cai, W.-J., Wang, Q.-G., Hang, C.-C., Lee, E.-
L., Sun, Y., Liu, K.-D., Zhang, Y., and Zou, B.
(2000). Advanced controller auto-tuning and its appli-
cation in hvac systems. Control Engineering Practice,
8(6):633–644.
Caldo, R. B. (2015). FLC-based indoor air quality assess-
ment for ashrae standard conformance. In Industrial
Engineering, Management Science and Applications
2015, pages 711–718. Springer.
Cavcar, M. (2000). The international standard atmosphere
(isa). Anadolu University, Turkey, 30:1–7.
Collotta, M., Messineo, A., Nicolosi, G., and Pau, G.
(2014). A dynamic fuzzy controller to meet thermal
comfort by using neural network forecasted parame-
ters as the input. Energies, 7(8):4727–4756.
Dash, S. K., Mohanty, G., and Mohanty, A. (2012). Intelli-
gent air conditioning system using fuzzy logic. In-
ternational Journal of Scientific & Engineering Re-
search, 3(12):1–6.
Gl
¨
uge, S., Hamid, O. H., and Wendemuth, A. (2010). A
simple recurrent network for implicit learning of tem-
poral sequences. Cognitive Computation, 2(4):265–
271.
Hamid, O. H. (2015). A model-based markovian context-
dependent reinforcement learning approach for neu-
robiologically plausible transfer of experience. In-
ternational Journal of Hybrid Intelligent Systems,
12(2):119–129.
Hamid, O. H., Wendemuth, A., and Braun, J. (2010).
Temporal context and conditional associative learn-
ing. BMC neuroscience, 11(1):45.
Jaynes, E. T. (2003). Probability theory: The logic of sci-
ence. Cambridge university press.
Keller, J. M., Fogel, D. B., and Liu, D. (2016). Fundamen-
tals of computational intelligence. Wiley-IEEE Press.
Kobersi, I. S., Finaev, V. I., Almasani, S. A., and Abdo,
K. W. A. (2013). Control of the heating system
with fuzzy logic. World Applied Sciences Journal,
23(11):1441–1447.
Air Conditioning Systems (2017). Air Conditioning Calcu-
lations. (online accessed: 2017, January 27).
Canadian Centre for Occupational Health and Safety
(2017). Thermal Comfort for Office Work. (2017,
February 17).
Engineering 360 Powered by IEEE GlobalSpec (2017).
HVAC - Ventilation. (online accessed: 2017, January
27).
McCormick, B. W. (1995). Aerodynamics, aeronautics, and
flight mechanics, volume 2. Wiley New York.
Mirinejad, H., Welch, K. C., and Spicer, L. (2012). A re-
view of intelligent control techniques in hvac systems.
In Energytech, 2012 IEEE, pages 1–5. IEEE.
Mohindru, P. and Sharma, G. (2015). Simulation perfor-
mance of pid and fuzzy logic controller for higher or-
der system. Simulation, 1(7).
Nowak, M. and Urbaniak, A. (2016). Application of predic-
tive control algorithms for thermal comfort and energy
saving in the classroom. In Carpathian Control Con-
ference (ICCC), 2016 17th International, pages 527–
532. IEEE.
Salsbury, T. I. (2005). A survey of control technologies in
the building automation industry. IFAC Proceedings
Volumes, 38(1):90–100.

Song, Y., Wu, S., and Yan, Y. (2015). Control strategies
for indoor environment quality and energy efficiencya
review. International Journal of Low-Carbon Tech-
nologies, 10(3):305–312.
Wang, Y.-G., Shi, Z.-G., and Cai, W.-J. (2001). Pid auto-
tuner and its application in hvac systems. In American
Control Conference, 2001. Proceedings of the 2001,
volume 3, pages 2192–2196. IEEE.
Ziegler, J. G. and Nichols, N. B. (1942). Optimum settings
for automatic controllers. trans. ASME, 64(11).
