
Instructional Application for Programming and
Algorithmic Self-Learning
A Didactic Approach with Mobile Robotics as Pedagogical Context
Pedro G. Feijóo-García
1
and Fernando De la Rosa
2
1
Systems Engineering Program, Universidad El Bosque, Bogotá D.C., Colombia
2
Systems and Computing Engineering Department, Universidad de los Andes, Bogotá D.C., Colombia
Keywords: Programming Learning, E-Learning, Programming Teaching, E-Robotics, Instructional Technology, Visual
Programming Language.
Abstract: One of the main challenges related to algorithmic and programming teaching with novice students, is to
focus their process on acquiring concepts and developing problem solving skills in programming, without
spending time overcoming syntax-oriented learning curves of specific languages. The application here
explained is proposed as an instructional technology that, using the advantages of Visual Blocks
Programming, through virtual and remote mobile robotics’ scenarios, seeks to give playful and friendly
mechanisms for programming and algorithmic self-learning. This paper presents the pedagogical design and
approach of the tool, evaluated through a User Experience approach with high school students in the
Colombian educational context.
1 INTRODUCTION
In the last decade, there has been of projects focused
on designing educational tools to teach and enhance
programming and algorithmic skills. Several
solutions propose games’ design, narratives’
development and other types of approaches, offering
the student the possibility to learn to program using
powerful visual and interactive mechanisms.
However, even if these solutions offer novel
pedagogical approaches, they are usually limited
because they need the presence of a trained tutor to
articulate them in the student’s process, most of
which are applications that even depend on special
technical configurations. Many of these solutions are
complements to a programming course, which
means that the student lacks an environment that
favors self-learning scenarios.
Although there has been global advance in the
design and development of new instructional
technologies emphasized in programming and
algorithmic teaching, within the Colombian
educational context, these technologies’ promotion
and elaboration have not been encouraged as they
should. Programming and algorithmic skills are
unjustifiably delegated to higher education in the
national educational scheme. This situation
jeopardizes students’ motivation towards studying
professional careers related to Information
Technology; careers that nowadays are highly
demanded within the local and international
industry.
Through this article, we present the conception,
design, implementation, and validation of RoBlock;
a Web application proposed to offer self-learning
environments for algorithmic and programming
concepts for high school students. This, to answer
the following research question:
Is it possible to design an instructional
application, contextualized in mobile robotics and in
a self-learning visual programming approach, to
motivate high school students to learn to program
autonomously?
This paper has the following organization:
section 2 presents the theoretical framework that
supports this study; followed by section 3 which
presents related works and technologies. Later,
RoBlock’s modules’ design is presented in section 4,
justifying it with the pedagogical strategy described
in section 5. Section 6 describes the main results
obtained; and finally, the conclusions and future
work are exposed in section 7.
230
Feijóo-García, P. and De la Rosa, F.
Instructional Application for Programming and Algorithmic Self-Learning.
DOI: 10.5220/0006690002300237
In Proceedings of the 10th International Conference on Computer Supported Education (CSEDU 2018), pages 230-237
ISBN: 978-989-758-291-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 THEORETICAL FRAMEWORK
2.1 Behaviorism and Constructivism
Behaviorism is a trend that was quite popular in the
early twentieth century, with a peak of popularity in
1958 when Skinner and Holland included the
principles of the reinforcement theory in their first
programmed learning course (Galvis, 1992).
This theory proposes that teachers may try to
bring students from a first state (a starting
knowledge base), to a higher one, where there is a
knowhow or skill they should acquire. Different
paths can achieve this, but one of these, is through
the programming of instructions along the teaching
process. By mentioning "programming of
instructions", we refer on how the student's learning
process is carried out through a series of pedagogical
stages, designed to guide the student from a
reference knowledge base, towards a level in which
there is a new knowledge she/he does not have at
that specific moment.
What makes Behaviorism a programming
approach, is the treatment given to the student to
guide her/him from the starting point where she/he
is, to the higher knowledge stage desired. The basic
behavioral principles are listed below:
An individual manages to learn by observing
the consequences of his/her actions.
Reinforcements are those consequences that
strengthen the possibility of repeating an
action.
The more reinforcement the student receives,
the more likely she/he is to perform the
desired action successfully.
The absence or delay of the reinforcement
after an action, limits the chances to repeat it.
Differential reinforcement can gradually shape
a student’s learning behavior.
Unlike Behaviorism, it is fundamental in
Constructivism to understand the subject that learns.
This involves the understanding of his/her vital field,
as well as the interaction between his/her
environment (the influence context) and what the
subject has been, is, and desires to be. When
referring to the vital field of the student, the theory
refers to the student's understanding of his/her
environment, formed by his/her past, present and
future (Galvis, 1992).
Within this theory’s approach, the learning
process is considered born with the creation of
knowledge through interaction with environments
that give or allow the exploitation of curiosity,
experiential experiences and the enhancement of the
student's imagination. In other words, it focuses on
providing the learner with the ability to learn while,
at the same time, he/she constructs his or her own
mental models.
Based on this approach, Constructivism declares
that the learning obtained by a student, is not the
result of a predefined structure of operations
(operation is an internalized action that changes the
object of knowledge). According to this, the
structures construct based on the learning process
that the student carries, considering that the student
does not evolve in his knowledge through the
association of knowledge, but through the
assimilation of new mental models.
2.2 Mobile Robotics as Pedagogical
Context
Mobile Robotics is a branch of knowledge that is
oriented in the study associated with machines that
can move on land, through the air or in the water;
spatially in two or three dimensions (Matarić, 2007).
For this study, it is interesting to use this
pedagogical context for programming and
algorithmic teaching, because it incorporates
concepts that involve the automation of activities
and decision making, whilst considering the
interaction of a Robot (physical device or machine)
with its environment using sensors of different types
(Feijóo & De la Rosa, 2016).
An interesting characteristic of Mobile Robotics,
is the possibility to build a virtual programming
environment, consistent with a respective physical
environment. This, considering that both scenarios
are, as far as possible, equivalent, if and only if, both
respect the behavior of elements considered and
keep the similarity of the Robot’s positioning in a
two or three dimensions’ environment.
A virtual programming tool allows multiple
students to interact and learn simultaneously.
Furthermore, the proposal of a virtual environment,
developed considering the operation of a real robot,
offers the possibility to consider problems and
solutions that could be raised equally in an
experimental environment with a physical robot.
3 STATE OF THE ART
3.1 Academic Background
Aggarwal et al. (2017) conducted a research to
determine the effectiveness and usefulness of the
Instructional Application for Programming and Algorithmic Self-Learning
231

Microsoft’s Kodu Game Lab to support students’
learning for programming. For their study, they
worked for two 90-minutes sessions, with two
groups of elementary students, obtaining and
comparing results from the usage of Kodu’s tiles and
flashcards (first group), and from the usage of paper
sheets with color prints of the design patterns
considered for the learning process (second group).
Both groups were composed by students without
previous programming knowledge, assessing them
before and after the study. The results of this
research present the benefits and the drawbacks of
using physical manipulatives in different scenarios.
On one hand, the students who did not interact with
the tiles showed to had acquired a better
understanding of the rules’ execution from their
interaction with the programming environment. On
the other hand, students who interacted with the
tiles, demonstrated a better understanding about
rules’ syntax and construction.
Grover and Basu (2017) present the design and
development of assessments items to measure
students understanding in introductory CS courses,
by answering the following research question: “How
can learning outcomes for computing constructs
such as variables, expressions (arithmetic and
logical), and loops, be organized into a structured
assessment framework and measured with technical
quality?”. They worked with 100 students from
different middle school courses, applying an
assessment framework that was developed following
the Evidence-Centered Design (ECD). From their
study, they conclude that, even though Visual
Blocks Programming (VBP) simplifies
programming syntax, there are still conceptual
difficulties towards using and understanding key
structures in programs, such as variables,
conditionals and loops. Finally, they invite to put
additional effort on pedagogical strategies,
especially on formative and summative assessments,
to measure students’ understanding and
misconceptions, looking forward to refining
pedagogy and curricula.
Weintrop and Holbert (2017) present findings
from a study in which they test how learners use a
dual-modality environment, having the possibility to
choose to work either a Visual Blocks Programming
(VBP) approach, or a text-based approach. Pencil
Code, the proposed environment, is used to
understand which is the modality preferred by
learners, and why they move from one modality to
another in a same project. From this study, the
authors conclude that the dual-modality approach is
effective for programming learning, considering that
all the participant students completed successfully
the programming assessments. Furthermore, they
indicate that blocks are useful to introduce a new
programming environment, as well as support items
for conceptual comprehension.
Paramasivam et al. (2017) performed a research
applying end-user programming tools for functional
robots in Computer Science education, presenting
results according to a week-long introductory
workshop, in which eleven students with different
disabilities programed a Clearpath Turtlebot. For
their workshop, they used an end-user programming
tool (EUP) named CodeIt, using a text-based
interface rather than a visual blocks programming
approach, to increase accessibility for students with
less motor skills and visual disabilities. Their
findings report that EUP tools can be used to create
advanced robotics platforms, accessible and useful
for novice programming students. Furthermore, they
indicate that the pairing of robotics with EUP tools,
enhance students’ confidence and interest towards
programming and Computer Science topics.
Gucwa and Cheng (2017) present a methodology
to create challenge problems, using simulation
environments for hardware robot-based
programming competitions. For their proposal, they
center on the RoboPlay Challenge Competition,
which involves Linkbots and RoboSim as hardware
and simulation technologies. The authors argue that
this competitive context offers a unique opportunity
for students to apply learned skills. Furthermore,
they conclude that tools like RoboSim, are useful to
let students and teachers to work with robots,
without the need of setup of physical hardware.
They finally find that the students’ response to the
competition context with RoboSim is positive,
mainly because of the opportunity this tool gives
towards rapid code improvement and validation,
arguing that virtual scenarios let students gain
effective and useful feedback.
3.2 Similar Technologies and
Languages
The technologies and languages presented here are
previous solutions that have characteristics like
those of RoBlock:
Scratch: Tool designed for people with no
notions of programming, for the design and
elaboration of 2D video games and animations
(MIT Media Lab & Lifelong Kindergarten
Group, 2006). This, using Visual Blocks
Programming as a playful mechanism of
interaction for learning. Scratch is Web, free
CSEDU 2018 - 10th International Conference on Computer Supported Education
232
and offers users’ profiling through
authentication mechanisms.
RoboBlockly: This is a web based tool that
uses Visual Blocks Programming in a robot-
approach context. With this tool, students
program a robot in a simulated environment,
enhancing skills towards computing, science,
technology, engineering and mathematics (C-
STEM). The visual blocks can be downloaded
as C++\C code with the Ch interpreter, letting
students use their code with Lego Mindstorm
and Linkbot robots (Frankie et al., 2017).
RoboSim: This is a standalone robot
simulation environment that allows students to
program virtual Linkbot and Lego Mindstorm
robots, working with the C++\C interpreter
Ch. The programs that students create with
this environment can be used to control
physical robots (Gucwa and Cheng, 2017).
Pencil Code: This is a tool that uses a Visual
Blocks Programming approach to teach
programming through art, music and stories
elaboration. Its main characteristic is that,
differently from other approaches, this tool
offers a collaborative scenario for learning.
Additionally, the tool offers the possibility to
switch from a visual approach to a textual one,
which enhances programming skills from
algorithms design to syntax understanding
(Weintrop and Holbert, 2017).
4 MODULES’ DESIGN
Following the application’s final design reported by
Feijóo and De la Rosa, 2016, RoBlock articulates a
methodology encompassed between Behaviorism
and Constructivism, by guiding the student through
modules dedicated to basic concepts of
programming and algorithmics, that are applied in
tasks that must be solved by a robot in environments
with free cells for displacement, marks to be
discovered, obstacles to avoid, colors to identify,
among other elements included. In total, the tool has
five virtual modules and a remote module that
allows the student to interact with real scenarios
available in a remote laboratory (module that is still
in a prototype state). The modules appear in an
incremental way, requiring from the student to
achieve each module before moving on to the
following one.
To carry out the incorporation of the pedagogical
strategies previously described through this article,
each of the five virtual modules corresponding to
RoBlock, offers a different interactive approach.
Considering that the pedagogical context that is
intervened with this project is the Colombian one,
the designed application is in Spanish, being it the
native language of the Colombian population.
4.1 Virtual Modules
RoBlock offers a total of five virtual modules,
exposing tasks and scenarios for the student’s
learning process towards programming and
algorithmic concepts and skills. The modules
included respond to the following big topics:
variables, sensors, conditionals, loops, and
functions.
Mobile robotics offers a pedagogical context apt
to teaching every one of the topics of interest
because of the successful convergence with the
needs and operations of a mobile robot.
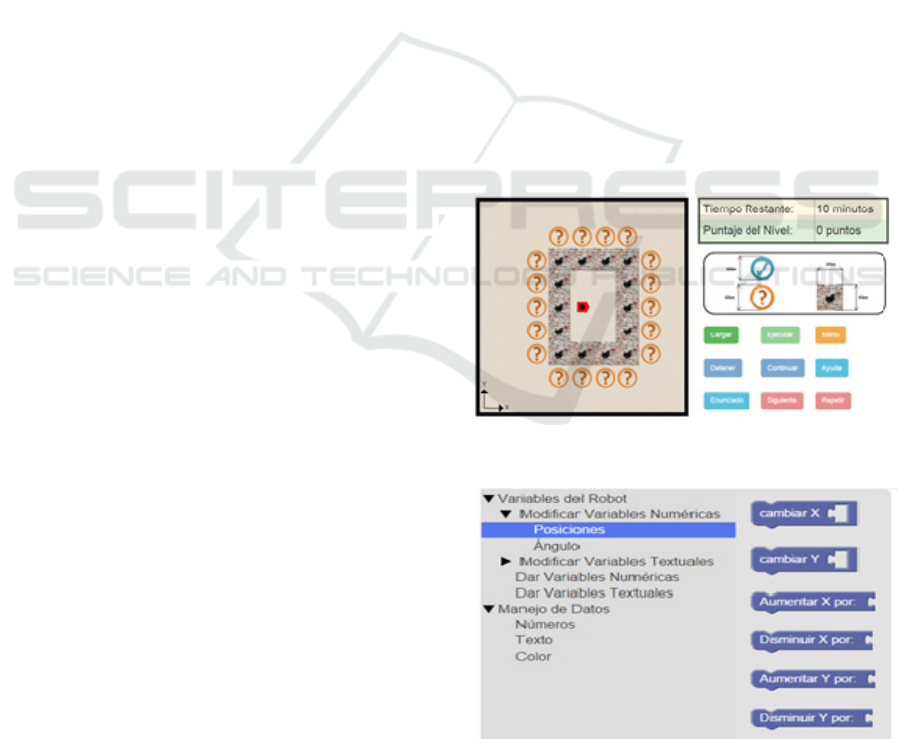
4.1.1 Module for Variables
For this proposed module, the student is asked to
solve exercises in which the robot must find a series
of marks that are distributed along a scene, within a
determined time frame (Figure 1).
Figure 1: Module for Variables (Content in Spanish).
Figure 2: Module for Variables – Blocks’ Menu
(Content in Spanish).
Instructional Application for Programming and Algorithmic Self-Learning
233
For this purpose, the tool gives the student a
series of Visual Blocks designed to manage the
robot’s position variables (translation and rotation),
in addition to an editor that helps with the
integration of these and the control of their
respective execution (Figure 2).
In this module, the student does not require yet to
reach all the marks in the scene in a single code
execution. Each achieved mark is saved as
"reached", letting the student to experience, use and
play with several of the blocks arranged for this
module.
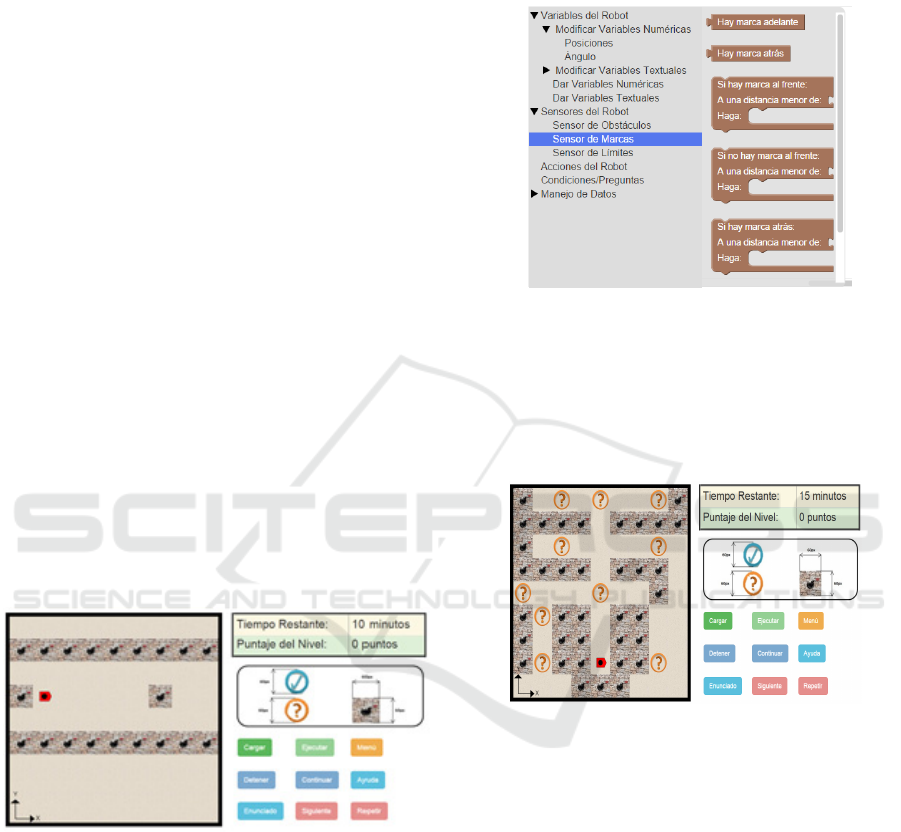
4.1.2 Module for Sensors and Module for
Conditionals
Throughout these modules, the student is asked to
solve exercises in which marks are hidden from the
scene, so the student requires to use sensors and
conditionals to find them in the time determined by
the problem (Figure 3).
Both modules differentiate in the type of visual
blocks available to the student. In the case of the
module for sensors, self-contained blocks for the
sensors management are provided, by which the
student does not need to declare or define any
condition. On the other hand, for the module for
conditionals, each sensor is summarized in a boolean
block, asking the student to define the evaluation of
conditions with additional conditions’ blocks.
Figure 3: Module for Conditionals (Content in Spanish).
The learning process of the student is
incremental, so that, having already passed the
module of variables, the tool gives the student a
series of blocks to handle position variables of the
robot (Figure 4), in complement with a series of new
blocks that allow the student to manage sensors
(module for sensors) and conditions (module for
conditionals).
As in the module for variables, in this module the
student does not require yet to find all the marks in
the scene with a single code execution. Each mark
that found is visible in the scene and saved as
"reached", making it easier for the student to
experiment with the use of several of the blocks
arranged for this level.
Figure 4: Module for Conditionals – Blocks’ Menu
(Content in Spanish).
4.1.3 Module for Loops
Through this module, the student works with
exercises in which the robot must move through
routes and proposed alleys (Figure 5).
Figure 5: Module for Loops (Content in Spanish).
As in the modules already described, the tool
grants the student a series of visual blocks proposed
for the management of position variables of the
robot, in complementing with a series of elements
that allow the student to handle sensors and
conditions. Furthermore, and from this module, the
tool provides blocks that let the student model and
use control instructions for loops and paths’
following (Figure 6).
Unlike the previous modules, in this module the
student requires solving the task through the scene
(or maze) in a single code execution. This is
achieved because each time the position of the robot
restarts, those marks already reached remain
unmarked. The premise is that the exercise must be
solved, emphasizing the need to declare and use
loops.
CSEDU 2018 - 10th International Conference on Computer Supported Education
234
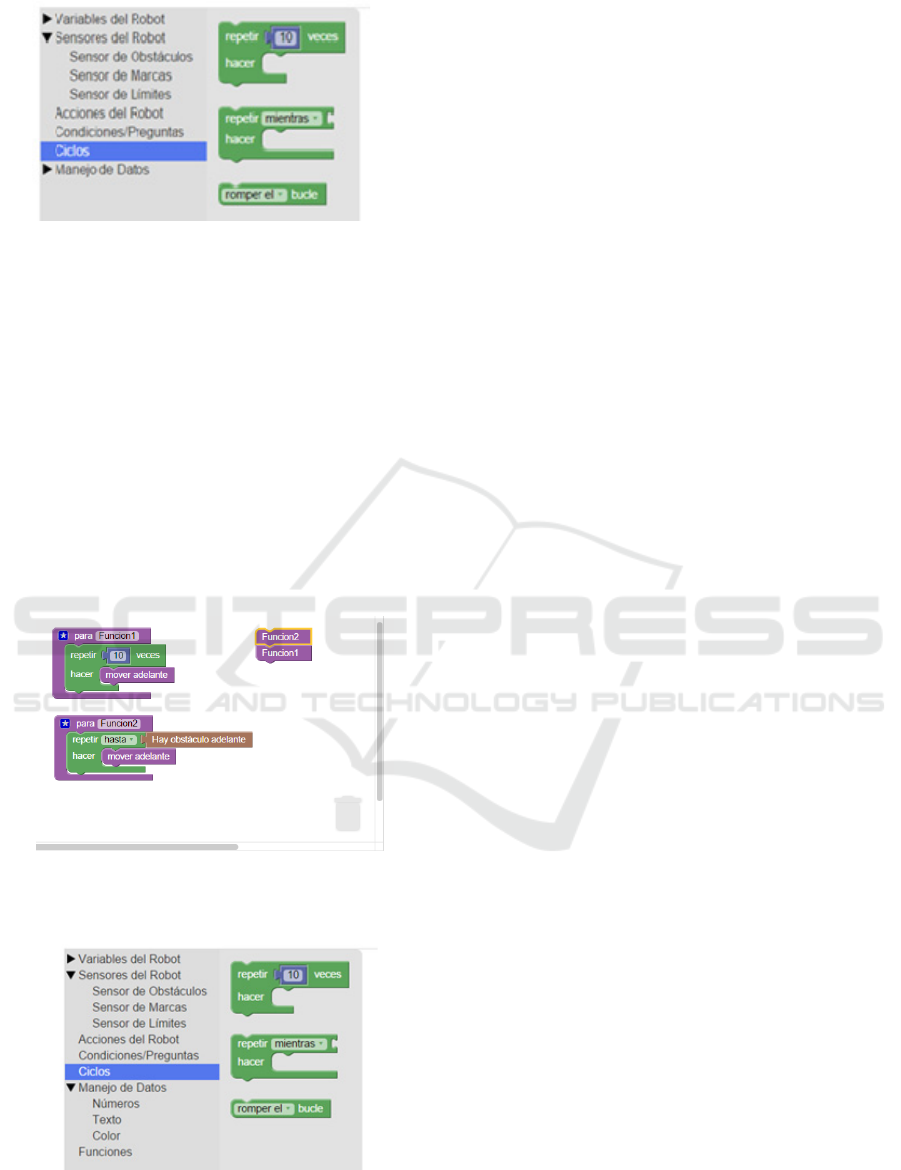
Figure 6: Module for Loops – Blocks’ Menu (Content in
Spanish).
4.1.4 Module for Functions
Throughout this last virtual module, the student
works with exercises in which all the types of
scenarios provided in previous modules appear. The
only difference is that, for this module, the student
must use functions (blocks enabled from this level)
that the tool validates from its declaration to its
invocation.
This module provides blocks for the declaration
and use of functions (Figure 7), in addition to those
blocks already grouped and offered to the student in
the previous modules (Figure 8).
Figure 7: Module for Functions – Declaration and Blocks’
Usage (Content in Spanish).
Figure 8: Module for Functions – Blocks’ Menu.
In the same way, as in the previous module, in
this module the student requires navigating the
raised scene with a single code execution. This
occurs because each time the robot’s position
restarts, the marks already reached remain
unmarked. The latter, with the premise that the
exercise is solved, emphasizing the need to declare
and use functions.
5 PEDAGOGICAL APPROACH
The designed tool proposes to offer the student self-
learning environments for programming and
algorithmic concepts and skills. This is because,
according to the directors of the participant
educational institutions in this project, and
considering the national educational scheme, there is
not enough curricular time to cover programming
and algorithmics topics, without sacrificing time for
the strengthening of core areas required in
Colombia: mathematics, natural sciences, history,
and Spanish.
Pedagogically, RoBlock makes use of both
Behaviorism and Constructivism; inviting the
student to design and construct her/his own answers
to tasks proposed by the tool, while raising levels of
knowledge that lead the student to the appropriation
of concepts of different complexities. These
problems are based on the principle that their
solution is unique. In this way, the students obtain
stimuli against their answers, based on the personal
development of its algorithmic solutions.
Considering that different students may not learn
programming equally, it is fundamental that the first
levels allow free will, but at the same time, focus on
the functionality of the algorithm or solution towards
the understanding and management of basic
concepts. This implies that the student is implicitly
guided to find the solution of the tasks proposed, by
offering only, and in a strategic way, those elements
needed to solve the proposed tasks.
6 ROBLOCK’S EVALUATION
To test RoBlock as a learning technology, 46 school
students from three institutions (one public and two
private) actively participated in a comparative
pedagogical evaluation environment using Scratch
as a reference technology, generating interesting and
significant results in terms of the programming and
algorithmics learning process. Among the target
Instructional Application for Programming and Algorithmic Self-Learning
235
population, 27 students evaluated RoBlock,
providing feedback, given the functionalities offered
by the software. The results here presented, which
correspond to the qualitative assessment conducted
within the study, complement the quantitative results
previously reported by Feijóo and De la Rosa
(2016).
6.1 UX: Students’ Perception
The study group interacted with RoBlock in a period
equivalent to five hours of experimentation.
Throughout the established period, they solved
exercises for each of the five virtual modules
offered, working approximately one hour per
module. At the end of their experience, the students
made a qualitative evaluation, providing their
opinions towards the tool and its purpose.
The results here presented show that the tool was
well received by the target population and that, for
five hours of interaction with it, a large minority
(close to 50%) was partially or totally in agreement
that it is possible to learn programming and
algorithmics only with RoBlock. This is of interest,
especially given the characteristics of the study
group, previously indicated in this document.
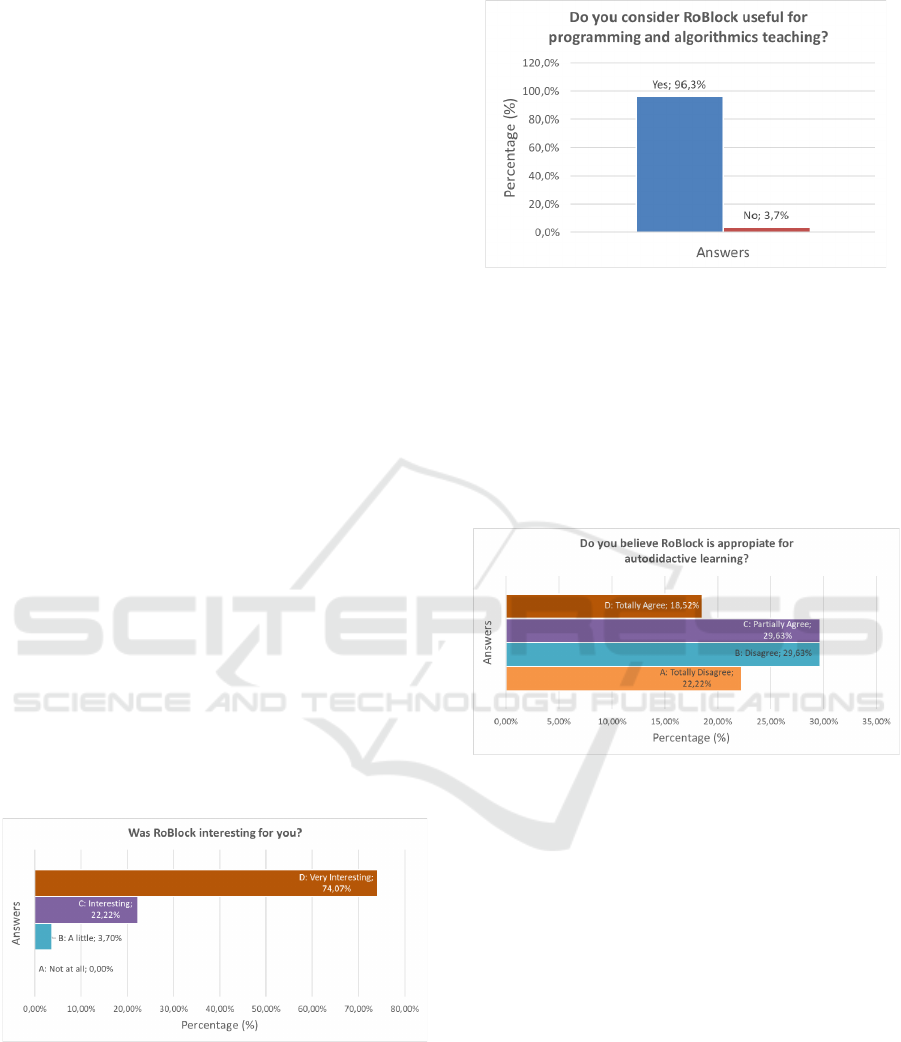
The first question was raised to know if the
group considered RoBlock an interesting tool. Most
students (96.3%) who worked with RoBlock
considered the tool interesting or very interesting
(Figure 9). This is favorable for the study,
considering that these students are the target
population of the project, and that those who
considered the tool not interesting, do not exceed 4%
of the population surveyed.
Figure 9: Answer: Do you consider RoBlock an interesting
tool?
Complementarily, most students (96%)
considered RoBlock as a good tool for teaching
programming and algorithmics in a playful way
(Figure 10).
Figure 10: Answer: Do you consider RoBlock useful for
Programming and Algorithmics teaching?
Finally, a higher proportion of students (52%)
indicated that they did not consider RoBlock enough
to learn to program in a self-taught way (Figure 11).
Yet, 48% of the students who worked with the tool
are partially or totally in agreement that RoBlock
serves to learn autonomously, which is considered a
favorable response for RoBlock in this study.
Figure 11: Answer: Do you believe RoBlock is appropriate
for self-learning?
7 CONCLUSIONS AND FUTURE
WORK
From this study, we conclude that the first version of
RoBlock was a success, and that this is a friendly,
interesting, and pleasant tool for the target
population to which it is directed. This, based on the
results obtained from the tests of User Experience
and the acceptance presented by the students
towards the tool.
In addition, we conclude that the research
question of interest to this project is satisfactorily
answered. With RoBlock, it is evident that it is
possible to design a technological tool to motivate
high school students to learn independently
CSEDU 2018 - 10th International Conference on Computer Supported Education
236

programming and algorithmics. This, considering
the results based on the second and third question
(Figures 10 and 11).
From this pilot study, there is a broad horizon for
future work involving RoBlock. In this study we
evaluated only the virtual scheme that RoBlock
offers through its first five modules, so it is worth
evaluating the use of physical and remote scenarios
with students, through the sixth module of the tool.
A future study will include the latest module offered
by RoBlock, and will evaluate the remote interaction
of students with physical robots in preconfigured
scenarios.
Also, based on the evolution of mobile
technologies, RoBlock could evolve towards to
operate with mobile devices, such as tablets and
smartphones. Likewise, it would be interesting to
carry out an impact study that indicates which
technological approach is most striking to the target
population, evaluating not only the appreciation for
the tool, but also the level of learning obtained by
the users.
ACKNOWLEDGEMENTS
We sincerely thank the educational institutions that
helped us in this first version of the project: Colegio
Provinma–Providencia Inmaculada (Bogotá,
Colombia), Centro Educativo y Cultural Reyes
Católicos (Bogotá, Colombia), and Programa
Progresa Fenicia (Universidad de los Andes, Bogotá,
Colombia). Their collaboration was essential for this
pilot study to succeed, as they efficiently
collaborated with their students and with all the
necessary computational resources.
REFERENCES
Aggarwal, A., C. Gardner-McCune, and D. S. Touretzky.
2017. Evaluating the Effect of Using Physical
Manipulatives to Foster Computational Thinking in
Elementary School. In Proceedings of the 2017 ACM
SIGCSE Technical Symposium on Computer Science
Education (SIGCSE '17). doi:
https://doi.org/10.1145/3017680.3017791
Feijóo, P. G., and F. De la Rosa. 2016. RoBlock – Web
App for Programming Learning. International Journal
of Emerging Technologies in Learning (iJET), Vol.
11, No. 12, 45-53. doi:
https://doi.org/10.3991/ijet.v11i12.6004
Frankie, T., D. Wesley, J. Gappy, and H. Cheng. 2017. C-
STEM: Engaging Students in Computing with
Robotics (Abstract Only). In Proceedings of the 2017
ACM SIGCSE Technical Symposium on Computer
Science Education (SIGCSE '17). doi:
https://doi.org/10.1145/3017680.3017832
Galvis Panqueva, A. 1992. Ingeniería de software
educativo. Bogotá: Uniandes.
Grover, S., and S. Basu. 2017. Measuring Student
Learning in Introductory Block-Based Programming:
Examining Misconceptions of Loops, Variables, and
Boolean Logic. In Proceedings of the 2017 ACM
SIGCSE Technical Symposium on Computer Science
Education (SIGCSE '17). doi:
https://doi.org/10.1145/3017680.3017723
Gucwa, K.J, and H.H. Cheng. 2017. Making Robot
Challenges with Virtual Robots. In Proceedings of the
2017 ACM SIGCSE Technical Symposium on
Computer Science Education (SIGCSE '17). doi:
https://doi.org/10.1145/3017680.3017700
Matarić, M. J. 2007. The Robotics Primer. Cambridge,
MA: MIT Press.
MIT Media Lab, and Lifelong Kindergarten Group. 2006.
Scratch. MIT. Retrieved from http://scratch.mit.edu
Paramasivam, V., J. Huang, S. Elliott, and M. Cakmak.
2017. Computer Science Outreach with End-User
Robot-Programming Tools. In Proceedings of the
2017 ACM SIGCSE Technical Symposium on
Computer Science Education (SIGCSE '17). doi:
https://doi.org/10.1145/3017680.3017796
Weintrop, D., and N. Holbert. 2017. From Blocks to Text
and Back: Programming Patterns in a Dual-Modality
Environment. Proceedings of the 2017 ACM SIGCSE
Technical Symposium on Computer Science
Education (SIGCSE '17). doi:
https://doi.org/10.1145/3017680.3017707
Instructional Application for Programming and Algorithmic Self-Learning
237
