
VOLA: A Compact Volumetric Format for 3D Mapping and Embedded
Systems
Jonathan Byrne, L
´
eonie Buckley, Sam Caulfield and David Moloney
Advanced Architecture Group, Intel, Ireland
Keywords:
Voxels, 3D Modelling, Implicit Octrees, Embedded Systems.
Abstract:
The Volumetric Accelerator (VOLA) format is a compact data structure that unifies computer vision and 3D
rendering and allows for the rapid calculation of connected components, per-voxel census/accounting, Deep
Learning and Convolutional Neural Network (CNN) inference, path planning and obstacle avoidance. Using
a hierarchical bit array format allows it to run efficiently on embedded systems and maximize the level of data
compression for network transmission. The proposed format allows massive scale volumetric data to be used
in embedded applications where it would be inconceivable to utilize point-clouds due to memory constraints.
Furthermore, geographical and qualitative data is embedded in the file structure to allow it to be used in place
of standard point cloud formats. This work examines the reduction in file size when encoding 3D data using
the VOLA format. Four real world Light Detection and Ranging (LiDAR) datasets are converted and produced
data an order of magnitude smaller than the current binary standard for point cloud data. Additionally, a new
metric based on a neighborhood lookup is developed that measures an accurate resolution for a point cloud
dataset.
1 INTRODUCTION
The worlds of computer vision and graphics, although
separate, are slowly being merged in the field of
robotics. Computer vision is taking input from sys-
tems, such as Light Detection and Ranging (LiDAR),
structured light or camera systems and generating
point clouds or depth maps of the environment. The
data must then be represented internally for the envi-
ronment to be interpreted correctly. Unfortunately the
amount of data generated by modern sensors quickly
becomes too large for embedded systems. An ex-
ample of the amount of memory required by dense
representations is SLAMbench (Nardi et al., 2015)
(kFusion) which requires 512 MiB to represent a 5m
3
volume with 1 cm accuracy (Mutto et al., 2012). A
terrestrial LiDAR scanner generates a million unique
points per second (Geosystems, 2015) and an hour
long aerial survey can generate upwards of a billion
unique points.
The result of having such vast quantities of data
is that it quickly becomes impossible to process, let
alone visualize the data on all but the most powerful
systems. Consequently it is rarely used directly. It is
simplified by decimation, flattened into a 2.5D Digital
Elevation Model (DEM), or meshed using a technique
such as Delaunay triangulation or Poisson reconstruc-
tion. The original intention of VOLA was to develop
a format that was small enough to be stored on an em-
bedded system and enable it to process 3D data as an
internalized model. The model could then be easily
and rapidly queried for navigation of the environment
as it partitions space based on its occupancy. This pa-
per focuses on the compression rates using the format
on different datasets.
Four publicly available large scale LiDAR
datasets were examined in this work. The data was
obtained by an aerial LiDAR system for San Fran-
cisco, New York state, Montreal and Dublin respec-
tively. Although the quality and resolution of the data
varies, they present a realistic representation of what
would be processed by an embedded system in the
real world, except on a much larger scale. This work
examines the effect of point density versus compres-
sion depth on the data for both dense and sparse map-
pings and then compares the VOLA format against
the original dataset. Our findings show that there are
dramatic reductions in file size with a minimal loss of
information. Another finding of this work is that aver-
age point cloud density is a poor metric for choosing
a resolution for the voxel model as it can be biased by
the underlying clusters in the data distribution. An ef-
ficient and easily calculated metric based on block oc-
cupancy is presented that takes into account the voxel
Byrne, J., Buckley, L., Caulfield, S. and Moloney, D.
VOLA: A Compact Volumetric Format for 3D Mapping and Embedded Systems.
DOI: 10.5220/0006797501290137
In Proceedings of the 4th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2018), pages 129-137
ISBN: 978-989-758-294-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
129

neighborhood when choosing a resolution.
2 RELATED RESEARCH
There exist several techniques for organizing point
cloud data and converting it to a solid geometry.
Point clouds are essentially a list of coordinates, with
each line containing positional information as well
as color, intensity, number of returns and other at-
tributes. Although the list can be sorted using the
coordinate values, normally a spatial partitioning al-
gorithm is applied to facilitate searching and sort-
ing the data. Commonly used approaches are the
octree (Meagher, 1982) and the KD-Tree (Bentley,
1975).
Octrees are based in three dimensional space and
so they naturally lend themselves to 3D visualization.
There are examples where the octree itself is used for
visualizing 3D data, such as the Octomap (Hornung
et al., 2013). Octrees are normally composed of point-
ers to locations in memory which makes it difficult to
save the structure as a binary. One notable exception
is the DMGoctree (Girardeau-Montaut, 2006) which
uses a binary encoding for the position of the point in
the octree. Three bits are used as a unique identifier
for each level of the octree. The DMGoctree uses a
32 or 64 bit encoding for each point to indicate the
location in the tree to a depth of 10 or 20 respectively.
Another recent development is Octnet (Riegler
et al., 2016). Their work uses a hybrid grid octree to
enable sparsification of voxel data. A binary format
is used for representing a set of shallow octrees that,
while not as memory efficient as a standard octree still
allows for significant compression. Furthermore they
developed a highly efficient convolution operator that
reduced the number of multiplications and allowed
for faster network operations when carrying out 3D
inference.
Another technique for solidifying and simplifying
a point cloud is to generate a surface that encloses
the points. A commonly used approach that locally
fits triangles to a set of points is Delaunay triangula-
tion (Boissonnat, 1984). It maximizes the minimum
angle for all angles in the triangulation. Triangular
Irregular Networks (TIN) (Peucker et al., 1978) are
extensively used in Geographical Information Sys-
tems(GIS) and are based on Delaunay triangulation.
One issue is that the approach noise and overlapping
points can cause the algorithm to make spurious sur-
faces.
A more modern and accurate meshing algorithm is
Poisson surface reconstruction (Kazhdan et al., 2006).
The space is hierarchically partitioned and informa-
Table 1: A comparison between VOLA and octrees.
VOLA octree
Implementation Bit Sequence Pointer Based
Traversal Arithmetic Modular Pointer
Variable Depth Yes Yes
Dense Search Complexity O(1) O(h)
Sparse search complexity O(h) O(h)
Embedded System Support Yes No
Look Up Table (LUT) Support Yes No
Easily Save to File Yes No
File Structure Implicit Explicit
Cacheable Yes No
Hierarchical Memory Structure No Yes
tion on the orientation of the points is used to generate
a 3D model. It has been shown to generate accurate
models and it is able to handle noise due to the combi-
nation of global and local point information. Poisson
reconstruction will always output a watertight mesh
but this can be problematic when there are gaps in
the data. In an attempt to fill areas with little informa-
tion, assumptions are made about the shape which can
lead to significant distortions. There are also prob-
lems with small, pointed surface features which tend
to be rounded off or removed by the meshing algo-
rithm.
Finally there are volumetric techniques encoding
point clouds. Traditionally used for rasterizing 3D
data for rendering (Hughes et al., 2014), the data is
fitted to a 3D grid and occupancy of a point is repre-
sented using a volumetric element, or “voxel”. Voxels
allow the data to be quickly searched and traversed
due to being fitted to a grid. While it simplifies the
data and may merge many points into a single voxel,
each point will have a representative voxel. Unlike
meshing algorithms, voxels will not leave out features
but conversely may be more sensitive to noise. The
primary issue with voxel representations is that they
encode for everything, including open space. This
means that as the resolution is increased or the area
covered is doubled then the memory requirements in-
crease by a factor of 8. An investigation into us-
ing sparse voxel approaches to accomplish efficient
rendering of large volumetric objects was carried out
by (Laine and Karras, 2011). The work used sparse
voxel octrees and mipmaps in conjunctions with frus-
trum culling to render volumetric scenes in real time.
This work was further developed under the name Gi-
gavoxel (Crassin et al., 2009).
VOLA combines the hierarchical structure of oc-
trees with traditional volumetric approaches, enabling
it to only encode for occupied voxels. Although there
is much similarity with traditional octrees this ap-
proach has several noticeable differences outlined in
Table 1. The approach is described in detail below.
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
130
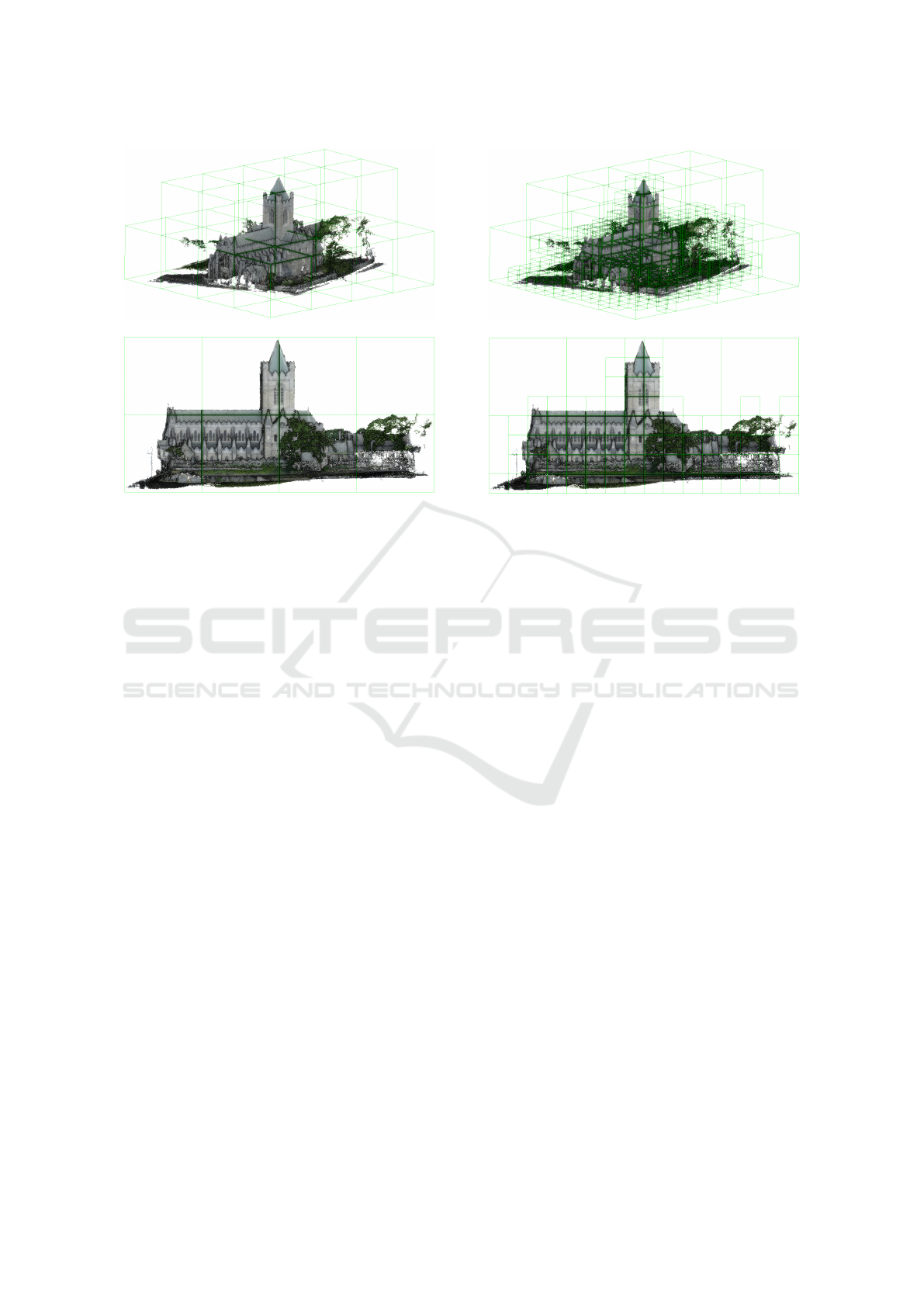
Figure 1: Tree depth one, the space is subdivided into 64
cells. The occupied cells are shown in green.
3 THE VOLA FORMAT
VOLA is unique in that it combines the benefits of
partitioning algorithms with a minimal voxel format.
It hierarchically encodes 3D data using modular arith-
metic and bit counting operations applied to a bit ar-
ray. The simplicity of this approach means that it is
highly compact and can be run on hardware with sim-
ple instruction sets. The choice of a 64 bit integer as
the minimum unit of computation means that modern
processor operations are already optimized to handle
the format. While octree formats either need to be
fully dense to be serialized or require bespoke seri-
alization code for sparse data, the VOLA bit array is
immediately readable without header information.
VOLA is built on the concept of hierarchically
defining occupied space using “one bit per voxel”
within a standard unsigned 64 bit integer. The one-
dimensional bit array that makes up the integer value
is mapped to three-dimensional space using modular
arithmetic. The bounding box containing the points
is divided into 64 cells. If there are points contained
within a cell the bit is then set to 1 otherwise it is set
to zero. The result of the first division is shown in
Figure 1.
For the next level each occupied cell is assigned
an additional 64 bit integer and the space is further
subdivided into 64 cells. Any unoccupied cells on the
upper levels are ignored allowing each 64 bit integer
to only encode for occupied space. The bits are again
set based on occupancy and appended to the bit array.
Figure 2: Tree depth two. Each occupied cell is subdivided
into 64 smaller cells.
The number of integers in each level can be computed
by summing the number of occupied bits in the previ-
ous level. The resolution increases fourfold for each
additional level as shown in figure 2
The process is repeated with each level increasing
the resolution of the representation by four until a res-
olution suitable for the data is reached. This depends
on the resolution of the data itself. The traditional
approach used is to compute the average points per
meter of the dataset and use this to compute a suit-
able tree depth. One of the issues raised in this work
is that the non-uniform distribution of points makes
this a poor metric. A new approach that approximates
voxel neighborhood is found to more accurately re-
flect the dataset is discussed in Section 7.
4 AERIAL LiDAR DATASETS
Real world data obtained from aerial LiDAR scans
is used in this work as it analogous to point cloud
data that would be obtained from an embedded sys-
tem used for 3D navigation, such as in a drone or a
self driving car. The four datasets examined in this
work are:
• The 2010 ARRA LiDAR Golden Gate Sur-
vey (san, )
• The 2013-2014 U.S. Geological Survey CMGP
LiDAR: Post Sandy (new, )
• The Montreal 2012 LiDAR Aerien Survey (mon,
a)
VOLA: A Compact Volumetric Format for 3D Mapping and Embedded Systems
131
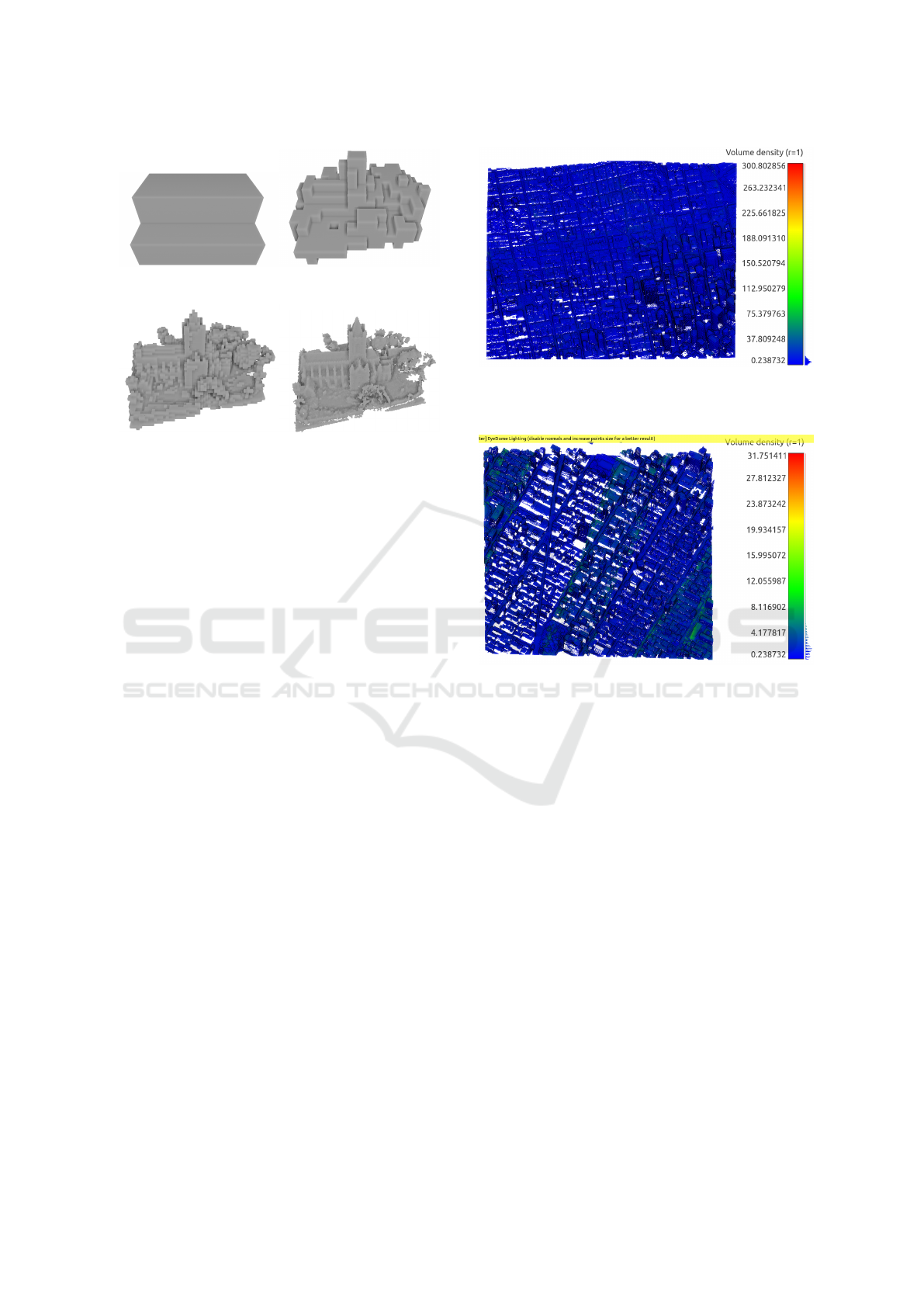
(a) Depth 1 (b) Depth 2
(c) Depth 3 (d) Depth 4
Figure 3: The output obtained for different tree depths. The
resolution increases by 4 for each axis on every successive
subdivision.
• The ALS 2015 Dublin survey (Laefer et al., )
The datasets were chosen as they model com-
plex built up urban environments and they are pub-
licly available open data (sfl, ; nyl, ; mon, b; dub,
). The density of the point clouds varies significantly
between the datasets due to the flight paths used to
gather the LiDAR data. Traditional GIS applications
are only concerned with generating Digital Elevation
Models which only requires a single height value per
grid point. Accordingly the amount of overlap be-
tween flight paths was reduced to cover the maxi-
mum area in the least time and the resulting models
are sparse. The San Francisco, Montreal and New
York datasets followed this approach and so have a
low point density. The San Francisco dataset prov-
ing to be the sparsest at 0.2 points per meter, followed
by New York with 1.5 points per meter and Montreal
with 8 points per meter, as shown in Figures 4, 5,
and 6. The Dublin dataset was gathered by the Ur-
ban Modelling group which research techniques for
maximizing 3D data and model generation (Truong-
Hong et al., 2013). They used up to 60% overlap
in order to increase the point density to 190 points
per meter. The data was captured at an altitude of
300m using a TopEye system S/N 443. It consists
over 600 million points with an average point den-
sity of 348.43points/m
2
. It covered an area of 2km
2
in Dublin city center.
One issue that is obvious with the datasets is that
point distribution is not uniform. Aerial LiDAR scans
are inherently biased due to the angle and height at
which the data is gathered. This is clearly highlighted
in Figures 6and 7 where the roofs are bright green
Figure 4: San Francisco LiDAR scan density. The points
are uniformly distributed with an average density is 0.2
points per meter.
Figure 5: The New York LiDAR scan is uniform and of
higher density (1.5 points per meter) than the San Francisco
scan but is missing the facades on the buildings.
and red, representing a higher point density. There
are more point returns generated by higher flatter sur-
faces, such as the roofs of buildings, rather than oc-
cluded street level structures. The average point den-
sity does not give an accurate representation of the un-
derlying data which is necessary for choosing the cor-
rect level of subdivision when voxelizing the dataset.
Our experiments show that the block occupancy,
which is analogous to a voxel neighborhood, gives a
more realistic metric of the point density by finding
the level of subdivision where the voxels become sep-
arated due to insufficient point density. The metric
will be explained in more detail in the Section 7.
5 EXPERIMENTS
Two experiments are carried out in this work. The
first experiment examines the difference between a
traditional dense mapping of the space using a 1
bit per voxel representation versus the hierarchical
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
132

Figure 6: The Montreal LiDAR scan density is 8 points per
meter and starts to show a non uniform distribution. The
rooftops and overlapping scan lines show up in green and
orange respectively.
Figure 7: The Dublin LiDAR scan density is 190 points
per meter and the distribution towards the rooftops is clearly
visible.
sparse mapping used by VOLA. The second exper-
iment compares standard and compressed VOLA to
the industry standard for point cloud compression, the
LAZ format.
5.1 Comparison of Dense Versus Sparse
Mapping
VOLA combines a 1 bit per voxel representation with
a hierarchical encoding. Rather than using 32 bit in-
teger to represent a voxel as in standard approaches,
the occupancy of each voxel is indicated by setting a
bit to 1. This encoding step alone will make the file
size 32 times smaller. What is unclear is the magni-
tude of reduction in file size results from a hierarchi-
cal compression. The worst case scenario, where the
points uniformly throughout the bounding box, would
result in dense and sparse volumes being of equal size.
The experiment measures the size reduction produced
by hierarchically encoding real world data. As both
Figure 8: Sparse versus Dense Encoding.
dense and sparse representations use one bit per voxel,
the one variable effecting file size is that the sparse
representation may omit empty space.
The sparse mapping discards any 64 blocks that
exclusively contain zeros. This means that empty
space is not encoded for but it adds an additional
overhead in processing time when packing and un-
packing the structure. Theoretically the worst case
for a sparse mapping, where points are uniformly
distributed throughout the space, would result in the
dense mapping and sparse mapping having equal size.
Fortunately points clouds based on real world data
generally have non-uniform distributions with most
point clouds consisting of empty space. (Klingen-
smith et al., 2015) found that only 7% of the space in
a typical indoor scene is in fact occupied. The density
of the Dublin LiDAR scan, for example, has an aver-
age occupancy of 1.36% per 100 meter tile. This work
examines the levels of compression obtained when
converting a point cloud to both dense and sparse rep-
resentations and how this is effected by the depth.
5.2 Comparison with LAS File Format
The VOLA format is compared to commonly used
industry standard for LiDAR data, the LAS file for-
mat. LAS is a binary format originally released by
the American Society of Photogrammetry and Re-
mote Sensing (ASPRS) for exchanging point cloud
data. LAS was designed as an alternative to propri-
etary formats or the commonly used generic ASCII
format. It has the ability to embed information on
the dataset and the points themselves, such as coordi-
nate reference system, number of returns, scan angle,
etc. An addition to this format is the compressed LAZ
format developed by (Isenburg, 2013). It is a lossless
format that takes advantage of the fact that LAS stores
the coordinates using a fixed point format to compress
VOLA: A Compact Volumetric Format for 3D Mapping and Embedded Systems
133

the data. The resulting files are between 7% and 25%
of the original size. LAZ is now become the de facto
standard for point cloud formats.
The comparison with VOLA has two caveats:
firstly, converting a point cloud to a voxel format will
implicitly simplify the distribution to a binary grid
distribution. A voxel is placed in the grid if there is at
least 1 point in the grid location. A voxel could result
from a single point or 1000 points and so information
on high point concentrations is lost. The result is that
the conversion to a voxel format is lossy.
The second consideration is that the LiDAR for-
mat contains meta-data about the points themselves,
such as color, intensity, number of returns, scan angle,
etc. Using 1 bit per voxel VOLA means that only the
occupancy is recorded. In order to carry out a fairer
comparison, 2 Bits per voxel VOLA is used to rep-
resent the point meta-data. The meta-data is encoded
in byte blocks which means the resolution of the val-
ues is reduced from 32 bits to 8 bits but as much of
this data is normally limited to this range (intensity,
number of returns) then there is no loss of informa-
tion. There is data loss on the resolution of the data
as 2 bits per voxel records the information for a 64 bit
occupancy block rather than the individuals voxels.
In order to compare point cloud compression with
VOLA compression we used a standard compression
algorithm on the VOLA format. While VOLA is com-
pact it is not compressed and so there is still sig-
nificant room for further file size reduction, whereas
the LAZ cannot be reduced further. The standard
gzip (Deutsch and Gailly, 1996) library was used to
compress the files. Gzip uses the deflate algorithm
for compression (Deutsch, 1996). The resolution of
the data used in this comparison was chosen by the
occupancy as calculated in the dense versus sparse ex-
periments. A resolution was chosen where the aver-
age block occupancy is above 15% which means that
there is a increased likelihood that the voxels are con-
nected.
6 DENSE VERSUS SPARSE
COMPARISON RESULTS
Each dataset was computed to multiple depths (and
therefore resolutions) in order to understand how the
file size compression was effected by the resolution.
The file size in megabytes was recorded for both the
dense and sparse representation. The improvement in
compression was computed by dividing the dense file
size by the sparse file size. An additional measure of
occupancy was computed by summing the bits in each
64 bit block in the sparse representation. This does
not give the actual neighborhood of a voxel, e.g., a
neighboring voxel could be contained in an adjoining
block, it does give an approximate measure of occu-
pancy.
The results for the San Francisco dataset are
shown in Table 2. Although this is the least dense
dataset it contains the largest number of tiles. The
magnitude reduction increases as the depth (and ac-
cordingly resolution) increases. The maximum com-
pression is 38 times smaller than the dense represen-
tation.
The initial occupancy is 46% at depth 1 which
then increases at depth 2 before decreasing again.
This is because the majority of bounding box is empty
space with most of the points having low height val-
ues.
It is also noted at depth 4 that the initial occupancy
of the voxel blocks falls below 10%. Each voxel in a
block can have up to 26 neighboring voxels of which
6 can be contiguous, i.e.,sharing a common face. As
the occupancy drops the likelihood of contiguity also
decreases. This is covered in more detail in Section 7.
Table 2: Depth results for San Francisco dataset for 234887
tiles.
Lvl Dense(MB) Sparse(MB) Mag
Red
Block
Occup
1 1.87 1.87 1 46.77%
2 122.14 40.2 3.04 51.93%
3 7818.92 881.3 8.87 29.70%
4 500412.66 12918.8 38.74 7.3%
The New York dataset in Table 3 shows a similar
reduction in file size for increasing depth with a simi-
lar magnitude reduction for depth 4. There is also the
same increase in block occupancy at depth 2 before it
decreases and is less than 10% at depth 4.
Table 3: Depth results for New York dataset for 86804 tiles.
Lvl Dense(MB) Sparse(MB) Mag
Red
Block
Occup
1 0.694 0.694 1 39.15%
2 45.138 13.197 3.42 60.42%
3 2889.53 318.82 9.06 31.25%
4 184930.71 4858.55 38.06 9.62%
The Montreal dataset results in Table 4 shows a
slightly more pronounced reduction in file size ini-
tially but is only 34 times smaller by depth 4. The
occupancy again spikes at depth 2 and reaches 15% at
depth 4. This would imply that more detailed features
are captured in the higher resolution.
The Dublin dataset results are shown in Table 5.
Due to the significantly higher point density it was
decided to increase the maximum depth to 5. This is
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
134
Table 4: Depth results for Montreal dataset for 66299 tiles.
Lvl Dense(MB) Sparse(MB) Mag
Red
Block
Occup
1 0.53 0.53 1 35.62%
2 34.47 9.44 3.65 62.52%
3 2206.96 233.08 9.47 37.97 %
4 141246.04 4106.08 34.4 15.62%
equivalent to each voxel representing a 9.7cm
3
cube
in the dataset. There is a smaller reduction in the file
size for successive depths compared to the previous
datasets but this increases to 70 time smaller at depth
5. The occupancy spikes at 87% at depth 2 and then
drops off to a minimum of 14.72%.
Table 5: Depth results for Dublin dataset for 356 tiles.
Lvl Dense(MB) Sparse(MB) Mag
Red
Block
Occup
1 0.0028 0.0028 1 52.5%
2 0.185 0.065 2.82 87.14%
3 11.85 1.96 6.05 48.33%
4 758.43 40.84 18.57 35.46%
5 48539.947 684.36 70.93 14.72%
6.1 Discussion
As stated earlier, if the data was distributed uniformly
throughout the bounding box this would result in
dense and sparse volumes being of equal size. The
experiments show that this is not the case with real
world data. There is an initial low occupancy for the
highest level encoding as the majority of points in
each 100m
3
tile are in the lowest third on the verti-
cal axis. Once this has been removed the remaining
space is largely occupied but then decreases for each
successive increase in resolution.
The magnitude of the reduction decreased for
more dense datasets but this was offset by a marked
increase in the magnitude of reduction for greater
depths. Although higher resolution datasets require
higher resolution VOLA models, increasing the res-
olution of sparse models increased the magnitude of
the space saving.
There was also a point with all the datasets where
the resolution increased to the point that the voxels
were no longer connected. The result is a voxel rep-
resentation where the number of voxels is the same as
the number of points (which is essentially a lossless
encoding of the data) but is not useful when comput-
ing collisions and navigation information. We shall
go into more detail on this in the next section.
7 BLOCK OCCUPANCY
Increasing the resolution resulted in greater number of
the points being disconnected. Although this means
that it more accurately represents the underlying point
cloud, it is less useful when using the representa-
tion for navigation or using machine learning on the
dataset. For example, analyzing a building facade or
detecting buildings using a 3D CNN require that the
data be connected into a contiguous object.
The true neighborhood of a voxel is difficult to
compute when using a hierarchical encoding as it re-
quires finding neighboring blocks when a voxel is on
the edge of the current block. An alternative approach
is to conduct a bitwise comparison on the voxels or to
compute Euclidean distance between the voxels in a
block and ignore neighboring blocks. This simplifies
the problem but it is still computationally expensive
due to the number of comparisons required.
A more efficient although less accurate approach
is to compute the occupancy of a block, as was used
in the previous experiments. The occupancy of a 64
bit block is computed by summing the bits set to one.
This is not the true is only an approximation of neigh-
borhood but it does give a clear probability of the
connected components in a block. A comparison of
the occupancy and its relationship with the number
of connected components is shown in Table 6 and is
found to closely approximate to the number of con-
nections per block.
Table 6: A comparison of occupancy and the number of
connected voxels within a block.
Occup Contig Vox StdDev Connected
100% 144 0 100%
75% 80.44 3.23 55.8%
50% 35.31 3.38 24.5%
25% 8.58 2.28 5.9%
10% 1.49 1.09 0.75%
The point density is traditionally used when work-
ing out the suitable resolution for a voxelised model
but this approach oversimplifies the distribution of the
data. It assumes the points have a uniform density
although the points tend to be biased towards areas
least occluded from the scanner, e.g., aerial LiDAR
data has many more times the points at the rooftops
than on ground level. It also takes no account for
the spread of points, i.e., points may cover a build-
ing consistently but only sparsely. Ignoring this worst
case resolution will result in fragmented voxel mod-
els. Although block occupancy may be an imperfect
metric, it is easy to compute and correlates well with
block contiguity. As such it provides a useful mecha-
VOLA: A Compact Volumetric Format for 3D Mapping and Embedded Systems
135

nism when determining what is a sufficient resolution
when processing a dataset.
8 LAS FORMAT COMPARISON
RESULTS
The VOLA format is compared against the Laszip for-
mat using a two bits per voxel representation. This
allows for the meta-data about the points to be en-
coded. The caveats are that VOLA is not a lossless
format and the resolution of the point information is
reduced due to the hierarchical encoding. The point
information is averaged over each 64 bit block. There
is then a comparison against VOLA when compressed
using a gzip, a generic compression library. The depth
chosen for the data was based on the previous results
where the voxels are still connected. The San Fran-
cisco, New York and Montreal datasets are at depth 3
and the Dublin dataset is at depth 4. The VOLA for-
mat now allows for an arbitrary amount of additional
information to be appended to the structure, although
only 2 bits are used in this example.
Table 7: A comparison of the file size reduction when using
LAZ and VOLA.
Dataset LAS LAZ % VOLA % VOLAZip %
San Fran 224GB 33GB 14.7% 1.76GB 1.07% 799MB 0.35%
New York 126GB 22GB 17.4% 637MB 0.5% 336MB 0.26%
Montreal 167GB 27.7GB 16.5% 466MB 0.27% 189 0.11%
Dublin 36GB 3.7GB 10.27% 81.68MB 0.22% 33MB 0.091%
The results show that VOLA can reduce the file
size on the datasets to less than 1% their original size.
VOLA compressed using generic methods further re-
duces this by up to 50%. Although LAZ offers sig-
nificant lossless compression, compressed VOLA re-
duces the file sizes to less than 5% of the LAZ files.
9 CONCLUSIONS
In this work we showed that encoding real-world data
using the hierarchical VOLA encoding massively re-
duces the file size. We also introduce a metric based
on voxel block occupancy that more accurately re-
flects the underlying point cloud distribution than av-
erage point density. Although it is only an approxi-
mation of neighborhood it is easily calculated using
VOLA’s block format.
We then compared the VOLA representation with
point meta-data with standard LiDAR formats. The
reduction of the file size when compared with the
LAS format less than 1%, albeit at the loss of some
resolution and point information. Using a generic
compression algorithm on VOLA results in it being
5% of the file size of the compressed LAZ format.
Due to the inherent sparsity of real-world data, a
hierarchical encoding that omits empty space makes
sense. These results show that it is possible to store
large amounts of 3D data in a memory footprint that
could easily be accommodated on an embedded sys-
tem for both mapping and machine learning applica-
tions.
10 FUTURE WORK
A generic compression algorithm was used to com-
press the data. This could be improved using bespoke
techniques developed for the underlying 3D data such
as run length encoding and look up tables for self sim-
ilar features. Our intention is to use such techniques
to further reduce the file size.
REFERENCES
The 2010 arra lidar: The golden gate lidar project.
https://data.noaa.gov/dataset/2010-arra-lidar/-golden-
gate-ca. Accessed: 2017-10-05.
2013-2014 u.s. geological survey cmgp lidar: Post sandy
(new york city). https://data.noaa.gov/dataset/2014-
u-s-geological-survey/-cmgp-lidar-post-sandy-new-
jersey. Accessed: 2017-10-05.
Dublin als2015 lidar license (cc-by 4.0).
https://geo.nyu.edu/catalog/nyu 2451 38684. Ac-
cessed: 2017-10-19.
Montreal lidar aerien 2015.
http://donnees.ville.montreal.qc.ca/dataset/lidar-
aerien-2015. Accessed: 2017-10-05.
Montreal lidar license (cc-by 4.0).
http://donnees.ville.montreal.qc.ca/dataset/lidar-
aerien-2015. Accessed: 2017-10-19.
Post sandy lidar survey license.
https://data.noaa.gov/dataset/2014-u-s-geological-
survey-cmgp/-lidar-post-sandy-new-jersey. Ac-
cessed: 2017-10-19.
San francisco arra lidar license.
https://data.noaa.gov/dataset/2010-arra-lidar-golden-
gate-ca. Accessed: 2017-10-19.
Bentley, J. L. (1975). Multidimensional binary search trees
used for associative searching. Communications of the
ACM, 18(9):509–517.
Boissonnat, J.-D. (1984). Geometric structures for three-
dimensional shape representation. ACM Transactions
on Graphics (TOG), 3(4):266–286.
Crassin, C., Neyret, F., Lefebvre, S., and Eisemann, E.
(2009). Gigavoxels: Ray-guided streaming for effi-
cient and detailed voxel rendering. In Proceedings of
the 2009 symposium on Interactive 3D graphics and
games, pages 15–22. ACM.
GISTAM 2018 - 4th International Conference on Geographical Information Systems Theory, Applications and Management
136

Deutsch, P. (1996). Deflate compressed data format speci-
fication version 1.3.
Deutsch, P. and Gailly, J.-L. (1996). Zlib compressed data
format specification version 3.3.
Geosystems, L. (2015). Leica scanstation p30/p40. Product
Specifications: Heerbrugg, Switzerland.
Girardeau-Montaut, D. (2006). Change detection on three-
dimensional geometric data. PhD thesis, T e l e com
ParisTech.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss, C.,
and Burgard, W. (2013). Octomap: An efficient prob-
abilistic 3d mapping framework based on octrees. Au-
tonomous Robots, 34(3):189–206.
Hughes, J. F., Van Dam, A., Foley, J. D., and Feiner, S. K.
(2014). Computer graphics: principles and practice.
Pearson Education.
Isenburg, M. (2013). Laszip. Photogrammetric Engineering
& Remote Sensing, 79(2):209–217.
Kazhdan, M., Bolitho, M., and Hoppe, H. (2006). Poisson
surface reconstruction. In Proceedings of the Fourth
Eurographics Symposium on Geometry Processing,
SGP ’06, pages 61–70, Aire-la-Ville, Switzerland,
Switzerland. Eurographics Association.
Klingensmith, M., Dryanovski, I., Srinivasa, S., and Xiao,
J. (2015). Chisel: Real time large scale 3d reconstruc-
tion onboard a mobile device using spatially hashed
signed distance fields. In Robotics: Science and Sys-
tems, volume 4.
Laefer, D. F., Abuwarda, S., Vo, A.-V., Truong-Hong,
L., and Gharibi, H. 2015 aerial laser and pho-
togrammetry survey of dublin city collection record.
https://geo.nyu.edu/catalog/nyu 2451 38684. Ac-
cessed: 2017-10-05.
Laine, S. and Karras, T. (2011). Efficient sparse voxel oc-
trees. IEEE Transactions on Visualization and Com-
puter Graphics, 17(8):1048–1059.
Meagher, D. (1982). Geometric modeling using octree en-
coding. Computer graphics and image processing,
19(2):129–147.
Mutto, C. D., Zanuttigh, P., and Cortelazzo, G. M. (2012).
Time-of-flight cameras and microsoft kinect (TM).
Springer Publishing Company, Incorporated.
Nardi, L., Bodin, B., Zia, M. Z., Mawer, J., Nisbet, A.,
Kelly, P. H. J., Davison, A. J., Luj
´
an, M., O’Boyle,
M. F. P., Riley, G., Topham, N., and Furber, S.
(2015). Introducing SLAMBench, a performance and
accuracy benchmarking methodology for SLAM. In
IEEE Intl. Conf. on Robotics and Automation (ICRA).
arXiv:1410.2167.
Peucker, T. K., Fowler, R. J., Little, J. J., and Mark, D. M.
(1978). The triangulated irregular network. In Amer.
Soc. Photogrammetry Proc. Digital Terrain Models
Symposium, volume 516, page 532.
Riegler, G., Ulusoys, A. O., and Geiger, A. (2016). Octnet:
Learning deep 3d representations at high resolutions.
arXiv preprint arXiv:1611.05009.
Truong-Hong, L., Laefer, D. F., Hinks, T., and Carr, H.
(2013). Combining an angle criterion with voxeliza-
tion and the flying voxel method in reconstructing
building models from lidar data. Computer-Aided
Civil and Infrastructure Engineering, 28(2):112–129.
VOLA: A Compact Volumetric Format for 3D Mapping and Embedded Systems
137
