
Automation of Intralogistic Processes through Flexibilisation
A Method for the Flexible Configuration and Evaluation of Systems of Systems
Marco Bonini
1
, Augusto Urru
1
, Sebastian Steinau
2
, Selcuk Ceylan
3
, Matthias Lutz
4
,
Jan Schuhmacher
5
, Kevin Andrews
2
, Harry Halfar
1
, Stefan Kunaschk
1
, Asadul Haque
3
, Vinu Nair
5
,
Matthias Rollenhagen
4
, Nayabrasul Shaik
4
, Manfred Reichert
2
, Norbert Bartneck
3
,
Christian Schlegel
4
, Vera Hummel
5
and Wolfgang Echelmeyer
1
1
ESB Logistikfabrik, Reutlingen University, Germany
2
Institute of Databases and Information Systems, Ulm University, Germany
3
Institute of Organisation and Logistics, Ulm University of Applied Sciences,Germany
4
Institute of Computer Science, Ulm University of Applied Sciences, Germany
5
ESB Logistik Lernfabrik, Reutlingen University, Germany
Keywords: Intralogistics, Automation, Flexibilisation, Modular Configuration, Human-Robot Interaction, Evaluation.
Abstract: The high system flexibility necessary for the full automation of complex and unstructured tasks leads to
increased technological complexity, thus to higher costs and lower performance. In this paper, after an
introduction to the different dimensions of flexibility, a method for flexible modular configuration and
evaluation of systems of systems is introduced. The method starts from process requirements and, considering
factors such as feasibility, development costs, market potential and effective impact on the current processes,
enables the evaluation of a flexible systems of systems equipped with the needed functionalities before its
actual development. This allows setting the focus on those aspects of flexibility that add market value to the
system, thus promoting the efficient development of systems addressed to interested customers in
intralogistics. An example of application of the method is given and discussed.
1 INTRODUCTION
The interconnectivity of systems promoted by the
fourth industrial revolution (industry 4.0), based
primarily on the real-time availability of digital
process information (such as position of goods
throughout a facility), paved the street for the
increasing adoption of service robots in the logistic
sector. According to projections for the 2017,
worldwide sales of robotic systems in intralogistic -
defined as the organization, control, execution and
optimization of the internal material and information
flows and the material handling in industry, trade and
public institutions (Arnold, 2006) - are estimated to
increase by 46% in respect to the previous year,
reaching the 37.000 units for a value of about US$ 1,2
billion (IFR, 2017). A large share of this positive
trend in sales is due to the growing use of AGVs
(automated Guided Vehicles) in manufacturing and
partially non-manufacturing environments
(Fraunhofer IPA, 2017), displaying a first and
obvious result of the interconnectivity of systems
provided by the concept of industry 4.0. However, the
total worldwide revenue of service robots for
professional use in logistics in 2016 (US$ 992
millions) amounts only to about 7,6% of the total
worldwide revenue of industrial robots in the same
year (US$ 13,1 billion) (IFR, 2017). The potential for
service robots in intralogistics application is still
huge. On the one hand, the growth of the logistic
sector, conveyed by the boom of the E-Commerce,
demands for automation of more than the transport
itself (AGV). On the other hand, advancements in
perception, decision-making and robot abilities make
it technically possible to automate handling and
manipulation processes for a large variety of items.
Despite these two converging factors, robotics
struggles to fulfil its potential in intralogistic
applications (Hägele, 2012), because the benefits of
using robotics for the automation of the material
handling in intralogistics not always justify the costs
of a robotic solution (Bonini, 2015). As a result, the
380
Bonini, M., Urru, A., Steinau, S., Ceylan, S., Lutz, M., Schuhmacher, J., Andrews, K., Halfar, H., Kunaschk, S., Haque, A., Nair, V., Rollenhagen, M., Shaik, N., Reichert, M., Bartneck, N.,
Schlegel, C., Hummel, V. and Echelmeyer, W.
Automation of Intralogistic Processes through Flexibilisation - A Method for the Flexible Configuration and Evaluation of Systems of Systems.
DOI: 10.5220/0006878003800388
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 380-388
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

need for efficient automation of some still manual
intralogistic processes remains largely unanswered.
On the one hand, potential users, seeking automation
of some currently manual intralogistic processes,
would rather buy technologies that are flexible, as the
capacity of flexible systems can be better exploited,
for a shorter investment payback period. On the other
hand, technology providers would rather design their
components to be flexible in order to be applicable in
different domains, products and processes, as some of
their fully mature technologies struggle to find their
way to market or do not total enough sales to justify
their development costs. However, the desired
flexibility comes together with an increased level of
complexity and therefore generally with (1) increased
costs and (2) decreased performance, two factors
potential users seeking automation of logistic
processes vigorously reject.
In order to solve this issue, research should
address two topics simultaneously. On the one hand
the costs of flexibility should be reduced by easing
the integration effort of existing software and
hardware technologies through a modular approach.
On the other hand, a method should be developed that
enables first the flexible configuration of a system of
systems (SoS from here onwards) through the
aforementioned technological modules and then its
evaluation before the actual development. This would
in turn prevent the development of systems no
investor wants to buy (high costs and low
performances), thus promoting the efficient
development of systems addressed to interested
customers in intralogistics.
After an introduction to flexibility and its
dimensions, this paper presents the aforementioned
method for flexible configuration and evaluation of a
SoS. The method is explained and an example of its
possible outcomes is given and discussed.
2 DIMENSIONS OF
FLEXIBILITY
In order to translate the general need for flexibility
into a more specific requirement of “what” should be
flexible and “to what extent”, we propose in this
section a novel taxonomy of flexibility. This is then
used in the second step of the proposed method
(translation into requirements), in order to focus the
type of flexibility required by potential customers.
Three dimensions of flexibility are identified:
process, system and technological flexibility.
2.1 Process Flexibility
The dimension of process flexibility concerns the
variety of processes, tasks and resources a SoS is
capable of coordinating and executing.
2.1.1 Resources Allocation
One of the challenges of contemporary process
management technology is the provisioning and
allocation of resources for process execution, hence
everything that is needed to execute a process,
including machines, knowledge, human workers or
robots. A resource, for instance a service robot, may
be allocated on a task according to static or dynamic
factors. Static factors refer to (1) whether a robot
possesses the necessary capabilities to handle a task
(e.g. an appropriate gripper or recognition system for
a product), (2) whether the terrain is suited for the
locomotion system of the robot and (3) whether the
robot possesses the necessary software for
performing the task. Dynamic factors of resource
allocation deal with resources not always being
readily available, as robots may be down for
maintenance or otherwise engaged. The efficient and
effective allocation of resources is paramount for
automated and semi-automated processes in the
intralogistics sector, where multiple processes run in
parallel, while still sharing the same resources.
Priorities of routine processes need to be set, as well
as extraordinary processes need to be integrated in the
decisional pipeline in order to be accomplished. To
consider all these aspects at run-time, a process
management technology must be able to handle the
various requirements flexibly, while prioritizing
resources according to specific constraints and
adapting to new circumstances (Reichert, 2012).
2.1.2 Workflow
Processes control many of the high-level functions
regarding intralogistics, such as decision-making;
their explicit representation as process models is
immensely beneficial, allowing for process optimiza-
tion thanks to thorough analysis and subsequent
removal of inefficiencies and inconsistencies. Ideally,
these process models are also compatible with a
process management system (PrMS), which becomes
then capable at run-time of: (1) coordinating the flow
of process information between all resources
involved, (2) supporting users when executing
processes by providing them with information and (3)
communicating decisions to super and subordinated
systems. Thanks to the modelling of processes and the
use of a PrMS, the workflow can be flexibly
Automation of Intralogistic Processes through Flexibilisation - A Method for the Flexible Configuration and Evaluation of Systems of
Systems
381

managed: process models can easily be changed and
adapted to changing circumstances (Weber, 2008).
These changes can be reflected in the actual process
execution of future process instances or even in
currently running processes: this often becomes
necessary when there are long-running processes
active at a given time as well as frequently updated
regulations or possible process optimizations and
changes. In such cases, running process instances
must be updated flexibly at run-time to reflect the
changes, a capability only few modern PrMSs
provide (Künzle, 2011).
2.1.3 Tasks Execution
The software an autonomous robotic system consists
of can be separated into different abstraction levels,
among which the task abstraction level is one of the
most abstract ones (RobMoSys, 2018). Modelling a
task at symbolic abstraction level provides a
representation of how the system parts of a robot are
orchestrated to provide a service, such as the
transportation of an item (Lutz, 2014). At the same
time, the modelling of simple tasks (e.g. picking or
transportation) allows for flexible composition of
more complex tasks (e.g. picking and transportation,
hence commissioning). In a design phase, tasks as
building blocks are the foundation to offer and deliver
services to a super-ordinated system and provide the
link between processes and functionality. The
composability of those tasks is an important
prerequisite for the development of domain specific
tools e.g. enabling a human operator to flexibly use
an assisting robot, by adopting an existing task or by
modelling a new one. In a run-time phase, the flexible
execution of the tasks is a prerequisite for robust real-
world capable robotics systems working in open and
human-shared environments, where changes in the
environment and unforeseen events need to be
considered (Steck, 2011).
2.1.4 Human-Robot Interaction
Humans play always a fundamental role in
automation, either as supervisors of an automated
SoS or as active parts of the system itself, especially
for the execution of those sub-tasks, which are
particularly complicated to automate or for which
accountability is required. The human-robot
interaction belongs to the process flexibility because,
depending on the complexity of the task, on the
required performance, on the available resources and
even on the time of the day, different resources
(human or automation) might be allocated to different
sub-tasks to seek an overall better efficiency.
2.2 System Flexibility
The dimension of system flexibility concerns the
capability of a SoS of adapting itself or being adapted
to achieve different goals, identified in the
summarized sub-categories.
2.2.1 Applicability to Different Scenarios
The applicability of the system to different scenarios
measures the capability of the system to fulfill
requirements for a wider range of processes or
domains, so that it can be successfully installed “out
of the box” in different applications. Considering
requirements from different scenarios, key to a wider
applicability, generates however higher system
development costs, which can be justified only in case
of a real consequent increase in sales. In the
development phase the selection of scenarios to be
considered should be limited to those requirements,
which bring a positive balance between increased
development costs and potential increase in sales.
2.2.2 Adaptability after Installation
The adaptability measures the ability of a system to
respond to certain unexpected changes after its
installation without being completely reengineered.
This is a fundamental characteristic in the dynamically
changing environment of intralogistics, where specific
tasks can change over a relatively short period and
facility layouts need to be adaptable to the changing
business. A scarce system adaptability to new slightly
different requirements would prevent the possibility of
spreading investment costs over a long time period,
representing thus a barrier to the investment.
2.2.3 Integration with Installed Technologies
Integration with technologies pre-installed at the
customer’s site represent often the highest cost and
therefore the greatest barrier to the market. To tackle
this problem through integrational flexibility, a SoS
should consider a variety of common integration
requirements concerning material and information
flow. This is done by (1) organizing the suitable
interfaces to make the integration process as plug-
and-play as possible and by (2) designing the system
with a modular approach (see section 3), so that
technological modules can be plugged or unplugged
in favor of a smoother integration.
2.2.4 Scalability
The scalability measures the capability of an intra-
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
382

logistic system of increasing (or decreasing) its
maximum capacity in respect to the demanded
throughput, by adding (or subtracting) other instances
of the system itself or sub-modules of it (Wencai,
2012). Designing a system in order to be up scalable
(or down scalable) reduces the risk of investing in
automation technology, by extending its service life,
which would be otherwise short due to the constantly
changing nature of the logistic sector. This degree of
flexibility is particularly necessary for instance in the
ramp-up phase of a hub for distribution, or for third
part logistic providers, which continuously renege-
tiate the volume of their business.
2.2.5 Productivity
The concept of productivity is close to the one of
scalability in respect to the capability of an
intralogistic system of increasing (or decreasing) its
throughput in respect to the demand. The difference
is however, that for this sub-category, such degree of
flexibility is reached without adding (or subtracting)
other instances of the system itself, but just by
controlling the output of the installed system. The
flexibility reached through productivity adjustments
of existing equipment is therefore limited in respect
to the one that can be reach by up or downscaling the
whole system. Productivity adjustments are
particularly important in those systems subjected to
seasonal fluctuation, such as the online retailing
business in periods before e.g. Christmas or the by
now global phenomenon of Cyber Monday.
2.2.6 Variants and Configurability
The ultimate level of system flexibility is the total
modular configurability, where functionalities could
be added or subtracted to the system by simply
plugging and unplugging technological modules.
Such total configurability could probably work in a
software environment, but it is hard to achieve from a
hardware standpoint, without an exponential increase
of development costs. A halfway compromise
between total configurability and a fix design is the
creation of variants for a SoS: this means limiting the
spectrum of technological hardware and software
module that can flow into a system to a pre-defined
set of configurations, each of which can be optimized
for a specific set of functionalities. The design is
nevertheless flexible, as to the possibility of
integrating in a single SoS a set of different and
alternative technological modules, but unlike the total
configurability, the variant approach allows for
containment of development costs.
2.3 Technological Flexibility
The dimension of technical flexibility concerns the
intrinsic flexibility of technological modules
composing the SoS.
2.3.1 Heterogeneity of Handled Goods
Handling and transport are the two processes that set
the bases for intralogistics. On the lowest level, the
basic aspect of flexibility at play is therefore the
capability of a system to handle and transport
heterogeneous goods. Heterogeneity can be due to
mainly three factors: (1) physical, (2) informational
and (3) environmental factors. Example of (1)
physical factors of the items are dimensions, weight,
shape (fixed or variable), surface (smooth, porous or
damaged), and resistance (robust or fragile) (Bonini,
2012). Among the (2) informational factors the most
relevant are the position of labels, and the means of
the information (one- or two-dimensional barcodes,
handwritten label, RF-ID etc..). For the (3)
environmental conditions, heterogeneity is not an
intrinsic characteristic of the goods, but rather
depending on the way items are grouped or sorted.
Increasing the flexibility of technological modules
such as grippers, object recognition technologies and
kinematics would result in the possibility of handling
a wider range of heterogeneous items, thus favoring
the applicability of the SoS.
2.3.2 Technological Capabilities
Technological modules composing a SoS embed
functionalities, which are necessary to give the robot
the capabilities to accomplish a task. The flexible
composition of technological capabilities is
paramount for the creation of a SoS through modular
approach. Software models and model driven
software development provides the tools to explicate
those structures required to enable the flexible
composition of software components, allowing the
reuse of closed software components on model level.
Robotic business ecosystems (RobMoSys, 2018)
(SeRoNet, 2018) using those structures are currently
being promoted and implemented, in which
participants are able to exploit synergies and share
risks, by offering their own software components to
other participant, thereby gaining access to
components offered by others. The developer of a
robotic commissioning system, for example, can use
the building blocks (thereby the expertise) of a
robotics navigation expert and other building blocks
to compose the system. The SmartMDSD-Toolchain
(Stampfer, 2016) as an integrated development
Automation of Intralogistic Processes through Flexibilisation - A Method for the Flexible Configuration and Evaluation of Systems of
Systems
383
environment makes those structures accessible to the
participants of the ecosystem. Models, as machine
readable representations for building blocks and their
encapsulated functionality, allow for the explication
of variation points within the building blocks. Those
variation points can be used to enable flexibility to
adapt the building blocks during system composition
and system operation.
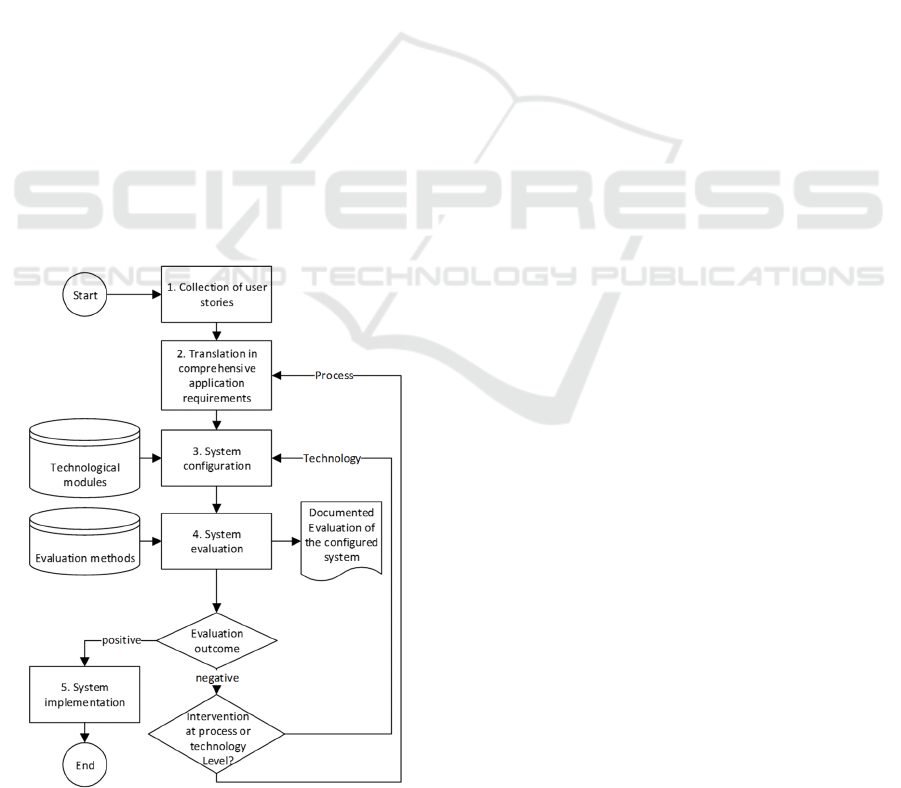
3 METHOD
In this section a new method for flexible modular
configuration and evaluation of systems of systems is
introduced, which, starting from process
requirements and considering factors such as
feasibility, development costs, market potential and
effective impact on the current processes, enables the
evaluation of a flexible SoS equipped with the needed
functionalities before its actual development. The
presented method is made of five major steps and
takes in input requirements of potential users,
technological modules implementing different
functionalities (see first level of flexibilisation in
section 2) and different system evaluation methods.
The output of this novel method is a virtually
configured SoS, with its documented evaluation.
Some steps of the method can be re-iterated, either
relaxing process requirements or re-arranging
Figure 1: method for flexible configuration of Sos.
technological modules, in order to find the
configuration providing the best system evaluation.
Each iteration yields a documented evaluation of the
configured system, hence providing not only a
decisional support tool for the design, but also a tool
for the tracking and documentation of these decisions.
This section is set to explain the five steps of the
method; in the next section an example is reported.
3.1 Collection of User Stories
User stories serve the purpose of collecting a critical
mass of potential user, which have the wish for
automation of the same (or similar) intralogistic
processes, but in potentially very different domains,
branches and applications. The potential users have in
common the need (or wish) for automation and the
lack of suitable (as in effective and efficient) systems
on the market.
3.2 Translation into Requirements
The translation of user stories into requirements is
fundamental to identify the needed functionalities,
with a particular focus on the type of needed
flexibility (process, system or technological – see
section 2). In the first iteration of the method,
requirements should be comprehensive of all possible
different application of the system under design,
because this would allow for a wider adoption after
the realization. As the next steps of the method are
implemented, considering a wide variety of
requirements, thus adding more functionalities to the
system, could result either impossible or inconvenient
(discovered during step 4 - system evaluation).
As the method progresses, or in following
iterations of the method, some of the requirement
might be sorted out, thus leaving behind some of the
potential users, which will reduce the critical mass,
needed for spreading the development costs.
3.3 System Configuration
Thanks to the collection of requirements and the
identification of necessary functionalities in the
previous step, the system can be virtually configured
with a modular approach drawing technological
modules from a pool of existing technologies, each
contributing to different system abilities. Example of
these technologies are the following macro
categories: object recognition, navigation, grasping,
transportation, booking (in connection with a
warehouse management system - WMS), decision-
making, mission planning, collision avoidance, robot
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
384

kinematics etc. Each of these macro-categories can be
divided into technological sub-modules that can
implement very different functionalities.
3.4 System Evaluation
In this step, the virtually configured system is
evaluated against general and application-specific
criteria. First (4.1) feasibility and (4.2) development
effort are evaluated according to general criteria. The
goal of the (4.1) feasibility evaluation is to assess
whether the integration of different technology
modules is possible and to give a numerical evidence
of technical boundaries of the new virtually
configured system. Once feasibility has been
positively assessed, the (4.2) development effort has
to be determined: here both the procurement costs
(hardware and software) and the integration costs
need to be considered, together with an estimated
effort for fine tuning in order to reach the target
performances of the system.
The next step of the analysis is the evaluation of
application-specific criteria. Here first and foremost
the (4.3) market potential needs to be estimated for
each application, domain and branch considered in
step 1 of the method (Urru, 2015). This assessment,
together with the estimated (4.2) development costs,
can give the system developer a first insight on the
potential of realization of the virtually configured
SoS. Another application-specific criterion to
evaluate is the performance of the system in the single
application calculated in comparison with the existing
process (manual or semi-automatic): this yields an
application-specific (4.4) assessment of the
advantages (savings, increased capacity, increased
ergonomics etc.) of the system with respect to the
current process (Urru, 2017). In case of negative
evaluation of any of the four criteria, the method
might loop back to previous. This can happen in any
of the following cases: if the system is (4.1) not
feasible, if the (4.2) development costs do not match
the (4.3) market potential or if the (4.4) advantages on
the current process are not satisfactory. In these cases
another configuration of the system could be
proposed (back to step 3 of the method – system
configuration), or a simplification (relaxation) of the
requirements for the system could occur (back to step
2 of the method – translation into requirements). In
this second case, as some of the functionalities are
sorted out and not implemented in the system,
potential user could be left behind and this needs to
be coherently considered in the estimation of the
market potential.
In case of positive result of the evaluation, after
one or more iteration of the method, the system
implementation (step 5) can begin.
4 METHOD APPLICATION
In this section, a simplified example of application of
the method is described: the first step is the collection
of user stories (step 1). In this simplified example, the
focus is set on the processes of commissioning and
replenishment (complementary and symmetric to
commissioning) of items in a warehouse. The first
user story comes from the pharmaceutical sector and
targets the process of product returns: these products
are checked for quality and expiration date upon
arrival and, overnight, replenished back into the
shelves of the warehouses. Since normally only
specific products with low turnover are returned, the
required performance is not high, but the process is
rather inconvenient (additional night shift with labor
involved), hence the wish for automation. The second
user story comes from the sector of internet retailing
and focusses on the process of commissioning in a
warehouse: the shape of the stored items can vary
from rigid cuboid, to flexible sack- or bag-shaped and
the weight can range from 0.1Kg to 20Kg. A high
performance is in this case critical to the success of
the automation, as the company seeks an increased
picking capacity. The third user story comes from the
food retailing sector and the process in question is the
replenishment of shelves for packaged food in a
supermarket. Since the replenishment needs to
happen during opening time of the shop, particularly
important is the safe interaction of the automation
with the customer. Items can vary from very fragile
glass bottles of wine, to fresh mozzarella bags and
weights can range from 0.05Kg to 5Kg.
The second step (step 2) of the method is the
translation of all user stories into comprehensive
requirements, inclusive of all collected scenarios.
This enables the identification of required
functionalities, such as an Optical Character
Recognition (OCR) reading module for the proof of
the expiration date in the pharmaceutical (first user
story) and food retailing sector (third user story).
Once the needed functionalities are listed, thanks
to the database of available technology modules, the
first virtual configuration of the system can start (step
3). A digression concerning the database of
technology modules is at this point necessary. In
order to keep the database up to date, explicit or
implicit collection of user stories from the point of
view of technology providers should be collected. For
Automation of Intralogistic Processes through Flexibilisation - A Method for the Flexible Configuration and Evaluation of Systems of
Systems
385

the simplified example reported in this section, it is
assumed that the database can be filled with the
following technological modules provided by
different technology producers and developed for
other niche applications: (1) an OCR developed for
the postal sector to read hand-written addresses, (2) a
mobile platform equipped with navigation modules
and a manipulator for the feeding of small cylindrical
parts (0.01Kg to 5Kg) to a production line by means
of a two-finger gripper, (3) an object recognition
module for cuboid-shaped goods, (4) an object
recognition module for bags and sack-shaped goods,
(5) a barcode reading module connected to a WMS
and (6) a suction cup gripper suited for small non-
porous items up to 5Kg. If the configurator of the
system is experienced and well aware of the
technological state of the art, the configuration (step
3) happens together with a preliminary feasibility
study (step 4.1). The preliminary feasibility concerns
mainly hardware integration aspects, such as respect
of payloads, energy demands, and constructional
mechanical stress. This helps filtering out some
system configurations that are clearly not feasible,
such as mounting a gripper on a manipulator with a
payload lower than the gripper itself. In order to
remain inclusive of all functionalities needed by the
different users in the example, the mobile platform
equipped with the manipulator should be
strengthened to support items up to 20Kg, it should
be equipped with the OCR, the barcode-reading and
cuboid-shaped object recognition modules and the
whole system should be integrate with a WMS.
The proposed configuration, yielded after the first
iteration of the method, is then evaluated (step 4).
Assuming that (4.1) this configuration is technically
feasible and (4.2) that the development effort is
justified by (4.3) the potential market in the three
sectors, the (4.4) advantages of application of this
configuration are then evaluated in each sector. In this
step of the evaluation (step 4.4) the following
complications emerge: (1) the mobile platform,
strengthened to reach the 20Kg requirement of the
second user story, is not applicable in a supermarket
(third user story), both because of layout problems
and because of safety regulations; (2) the system does
not deliver improved overall performances in the
commissioning (second user story); (3) in order to
handle the variety of goods in the supermarket two
different interchangeable gripper are necessary (a two
finger-gripper and a suction cup gripper); (4) in the
pharmaceutical (only cuboid goods) and the internet
retailing sector (only non-porous items) the most
performing way to grasp items is through a suction
cup gripper. Considering this technological remarks,
provided by the evaluation step, the method can be re-
iterated in order to obtain a system configuration that
can be positively evaluated.
It is evident that the second user story (internet
retailing) poses challenging requirements, with high
impact on the negative result of the evaluation. Only
after acknowledging the lacks of the new configured
system, especially concerning performances, the
method loops back to its second step (step 2), where
requirements are analyzed again and alternately
relaxed, seeking synergies towards a partial
automation of a slightly modified process. In this
specific user story of internet retail, it would be for
instance possible, to divide the warehouse in four
areas according to item size and required picking
performance. The commissioning of small items
requiring high picking performance (fast movers)
could be achieved through standard technologies such
as the Autostore or the Amazon Kiva system; the
commissioning of large fast movers could be
automated with an automatic storage and retrieval
technology; the commissioning of large slow movers
(low picking performance required) could remain
manual. The last part of the warehouse, namely the
one dedicated to the commissioning of small (up to
5Kg) slow movers could be automated through a
small mobile platform, which could be suitable for the
automation of the other user stories as well.
The system is therefore re-configured (step 3) in
order to fulfill the new (relaxed) requirements. As the
necessary payload is reduced to 5Kg and
performances are not the highest priority for the
system, the existing mobile platform equipped with
the manipulator can be used, equipped with the OCR,
barcode-reading and cuboid-shaped object
recognition modules and with an interchangeable
gripper (two-finger and suction cup). An interface to
the central WMS completes the system configuration,
result of the second iteration of the method.
The relaxation of requirements has two different
and opposite effects highlighted by the evaluation of
the new configuration (step 4). On the one hand, the
development costs sunk, as the platform does not
need to be strengthened to reach the 20 Kg
requirement, but, on the other hand, the market
potential shrunk, as only approximately 25% of the
processes in the second user stories can be automated
with the proposed technology. If, considering the
significant reduction of development costs, the
market potential is still appealing, the system is
evaluated in each scenario for its efficiency (saving,
performances etc…). If this final part of the
evaluation is positively concluded, the obtained
results can be also used as a marketing tool to ease the
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
386

decision to invest. Once a commitment of some sort
has been stipulated with potential users (for instance
those providing the initial user stories) the
implementation of the system can begin.
5 DISCUSSION
The weakest link of the proposed method resides in
the fourth step: the system evaluation. This is not due
to the difficulty of the evaluation itself: in literature
several methods for assessment of (4.1) feasibility,
(4.2) development costs, (4.3) market potential and
(4.4) performance and economic advantages of
automation can be found, which could be applicable.
The evaluation is the weakest link of the method
because what is being evaluated is not an existing
SoS, but a virtual one, configured in step 3 (system
configuration) on the bases of the required
functionalities. The power of the evaluation resides in
its numerical and possibly objective aspect, but if the
system under evaluation is 100% virtual, one could
argue that this numerical quantification becomes
vain, invalidated by the too many necessary
assumptions. However, the configured SoS will
normally consist in great majority of an existing
platform (in the example, the mobile platform with
navigation modules and manipulator), which needs to
be modified by adding some other technological
modules. The existing technological platform will
account for a consistent percentage of the whole
system, so that the remaining share, upon which
assumptions need to be made for the evaluation, will
have a relatively minor impact in the uncertainty of
realization. Although this does not fully erase the risk
of evaluating a partially virtual system upon some
assumptions, this risk is mitigated by reducing the
impact of such assumptions, hence restoring the value
of a quantitative evaluation.
Future research will focus on the validation of the
proposed method through at least three different
applications, for different intralogistic processes.
6 CONCLUSION
After a brief introduction on robotics in intralogistics,
in this paper an alternative taxonomy of flexibility
was introduced together with a novel method for
flexible modular configuration of systems of systems.
The novelty of the method relies in the possibility of
evaluating the virtual systems of systems, equipped
with the needed functionalities, before its actual
development. This is accomplished first analyzing all
process requirements, then assessing factors such as
feasibility, development costs, market potential and
effective impact on the current processes. Thanks to
the evaluation before realization, the development
effort is focussed on those aspects of flexibility that
add market value to the system, thus promoting the
efficient development of systems addressed to
interested customers in intralogistics. An example of
the method application was given and the main
outcomes discussed.
ACKNOWLEDGEMENTS
Supported by „EFRE Program Baden-Württemberg
2014-2020“, Project: ZAFH Intralogistik.
REFERENCES
Arnold, D., 2006. Intralogistik – Potentiale, Perspektiven,
Prognosen, Springer. Berlin.
Bonini, M. Tishchenko, K., Kirchheim, A., Echelmeyer,
W., 2012. Application of Cognitive Robotics within
Logistics, Proceedings of the Austrian Robotic
Workshop.
Bonini, M., Prenesti, D., Urru, A., Echelmeyer, E., 2015.
Towards the full automation of distribution centers,
Proceedings of IEEE 4th International Conference on
Advanced Logistics and Transport (ICALT), pp.47-52.
Fraunhofer IPA, 2017. RockEU2, Market and supplier
study on European robotics, service robotics,
Deliverable 1.7.
Hägele, M., 2012. Market Study on European Service
Robotics, EURobotics, The European Robotics
Coordination Action, Fraunhofer IPA.
IFR, 2017. World Robotics 2017 - Industrial Robots and
Service Robots, International Federation of Robotics.
Künzle, V., Reichert, M., 2011. PHILharmonicFlows:
towards a framework for objectaware process
management, Journal of Software: Evolution and
Process.
Lutz, M., Stampfer, D., Lotz, A., Schlegel, C., 2014.
Service Robot Control Architectures for Flexible and
Robust Real-World Task Execution: Best Practices and
Patterns, Workshop Roboter-Kontrollarchitekturen,
Informatik, Springer LNI der GI. Stuttgart.
Reichert, M., Weber, B., 2012. Enabling flexibility in
process-aware information systems: challenges,
methods, technologies, Springer. Berlin.
RobMoSys, 2018 - RobMoSys: Composable Models and
Software for Robotic Systems, https://robmosys.eu/.
SeRoNet, 2018 - Plattform zur arbeitsteiligen Entwicklung
von Serviceroboter-Lösungen http://seronet-projekt.de.
Stampfer, D., Lotz, A., Lutz, M., Schlegel, C., 2016. The
SmartMDSD Toolchain: An Integrated MDSD
Automation of Intralogistic Processes through Flexibilisation - A Method for the Flexible Configuration and Evaluation of Systems of
Systems
387

Workflow and Integrated Development Environment
(IDE) for Robotics Software, Special Issue on Domain-
Specific Languages and Models in Robotics, Journal of
Software Engineering for Robotics, JOSER.
Steck, A., Schlegel, C., 2011. Managing execution variants
in task coordination by exploiting design-time models
at run-time. Proceedings of IEEE/RSJ Int. Conf. on
Robotics and Intelligent Systems (IROS).
Urru, A., Bonini, M., Burbach, T., Höng, E., Stein, P.,
Echelmeyer, W., 2015, Autonomous unloading of heavy
deformable goods: market opportunities, proceedings
of IEEE International Conference on Service
Operations Logistics and Informatics (SOLI).
Urru, A., Bonini, M. and Echelmeyer, W., 2017, The STIC
analysis A decision support tool for technology related
investments in logistics, proceedings of IEEE
International Conference on Service Operations
Logistics and Informatics (SOLI).
Weber, B., Reichert, M., Rinderle-Ma, S., 2008. Change
patterns and change support features–enhancing
flexibility in process-aware information systems, Data
& knowledge engineering, Volume 66, Issue 3, pp. 438-
466, Elsevier.
Wencai, W., Yoram, K., 2012. Scalability planning for
reconfigurable manufacturing systems, Journal of
Manufacturing Systems, Volume 31, Issue 2, pp. 83-91.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
388
