
ADAPTIVE SMITH PREDICTIVE CONTROL OF NON-LINEAR
SYSTEMS USING NEURO-FUZZY HAMMERSTEIN MODELS
José Vieira
1
Escola Superior de Tecnologia de Castelo Branco, Departamento de Engenharia Electrotécnica, Av. Empresário, 6000
Castelo Branco, Portugal
Alexandre Mota
Departamento de Electrónica e Telecomunicações, Universidade de Aveiro, 3810 Aveiro, Portugal
Keywords: Adaptive control, Smith predictive control, Hammerstein models, neuro-fuzzy modelling, on-line
identification, recursive least square and covariance matrix
Abstract: This paper proposes an Adaptive Smith Predictor Controller (ASPC) based on Neuro-Fuzzy Hammerstein
Models (NFHM) with on-line non-linear model parameters id
entification. The NFHM approach uses a zero-
order Takagi-Sugeno fuzzy model to approximate the non-linear static function that is tuned off-line using
gradient decent algorithm and to identify the linear dynamic function it is used the Recursive Least Square
estimation with Covariance Matrix Reset (RLSCMR). This algorithm has the capability of follow fast and
slow dynamic parameter changes. The proposed ASPC has special capabilities to control non-linear systems
that have gain, time delay and dynamic changes through time. The implementation of the ASPC is made in
two steps: first, off-line estimation of the non-linear static parameters that will be used to “get linear” the
non-linearity of the system and second, on-line identification of the linear dynamic parameters updating
direct and inverse models used in the ASPC. As an illustrative example, a gas water heater system is
controlled with the ASPC. Finally, the control results are compared with the results obtained with the Smith
Predictive Controller based in a Semi-Physical Model (SPMSPC).
1
This work was supported in part by the Portuguese Government through the PREDEP program.
1 INTRODUCTION
Industry control processes presents many
challenging problems, including non-linear dynamic
behaviour, uncertain time delay and time varying
parameters. During the last decades, a very
promising model based control solution used in
industry processes with time delay is the
predictive/Smith predictive model based controller.
In this algorithm it is important to choose the right
model representation of the linear/non-linear system.
The model should be accurate and robust for all
working points, with a simple mathematical
representation and with a transparent representation
that makes it interpretable. The most common non-
linear modelling methods are: the NARX and
NAARX models, neural-networks models fuzzy
models and Hammerstein and Wiener models.
When the knowledge of the control systems does not
ex
ist or th
e process is subject to changes in its
dynamic characteristics it is important to use an
adaptive control algorithm.
There are two types of model based controllers: off-
l
ine t
uned model based controllers (Abonyi el at.,
2000), (Pottmann and Seborg 1997), (Vieira el at.,
2003) and adaptive controllers with on-line
parameters identification as (Abonyi el at., 1999)
and (Fink el at., 2001).
This paper presents a simple adaptive model based
co
ntro
ller that uses the NFHM approach (Vieira el
at., 2004b) with a modification that gives to the
algorithm the capability of identify on-line the linear
dynamic parameters of the linear part of the global
62
Vieira J. and Mota A. (2004).
ADAPTIVE SMITH PREDICTIVE CONTROL OF NON-LINEAR SYSTEMS USING NEURO-FUZZY HAMMERSTEIN MODELS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 62-69
DOI: 10.5220/0001131900620069
Copyright
c
SciTePress
model. Hammerstein model approach gives simple
and interpretable models that facilitate the
identification and its integration on control schemes.
Based on this presupposes, it is proposed a simple
solution for the adaptive control of non-linear
systems that presents uncertain, time delay and time
varying dynamic parameters. In time variant
processes, the non-linear static functions are usually
fixed through time (permitting tuning off line) and
the changes are in its dynamic behaviour so it is
necessary to identify the linear dynamic parameters
on line (Fink el at., 2001).
Section 2 and 3, describes the Neuro-Fuzzy
Hammerstein Model structure and the modified
identification method. For the non-linear static
function approximation it is used a zero-order
Takagi-Sugeno fuzzy model tuned with gradient
decent algorithm. With the inverse of this non-linear
static function the non-linear system will be linear.
For the linear variant dynamic function
approximation it is used the on-line recursive least
square parameter estimation with reset of covariance
matrix algorithm. This algorithm has the capability
of identify fast and slow dynamic parameter
changes.
The challenger for non-linear on-line identification
is to guarantee that all parameters of the varying
dynamic model are correctly identifies even in the
presence of a varying time delay and a noisy system.
Section 4, describes the ASPC that is implemented
in two steps: first, off-line estimation of the non-
linear static parameters and second, on-line
identification of the linear dynamic parameters
updating direct and inverse models of the system
used in the controller.
Section 5, shows the control results using the ASPC
applied in to a domestic gas water heater system.
The results are compared with the ones achieved
with the Smith Predictive Controller based in a
Semi-Physical Model (Vieira el at., 2004a).
Finally, in section 6, the conclusions and future
works are pointed.
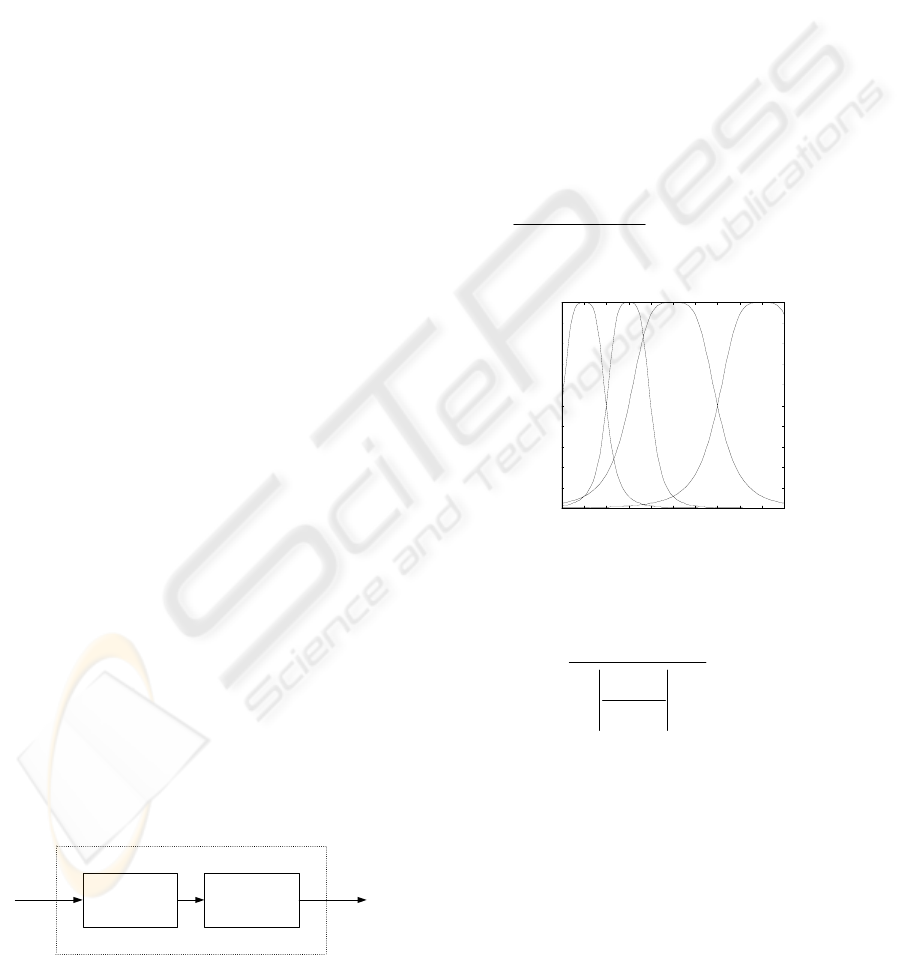
2 STRUCTURES OF THE NFHM
The NFHM consists of a series connection of a non-
linear static function f(.) and a linear dynamic
function G(s) as shown in Figure 1.
Figure 1: Hammerstein Model.
It is proposed, that the non-linear static function
would be approximated by a zero-order Takagi-
Sugeno fuzzy model
The fuzzy model function f(.) can be formulated
as a set of r local constant functions z
1
=d
1
, …, z
r
=d
r
where d
1
,…, d
r
are constant parameters that are
conjugated in the form of rules:
1..r1..r1..r1..r
dz THEN A isu IF:R =
(1)
where A
1..r
are the antecedent fuzzy sets for the input
u and d
1..r
are the consequent constant parameters.
All fuzzy sets are bell shaped type membership
functions see Figure 2.
From a given u, the output of the fuzzy model z is
inferred by computing the weight average of the rule
consequents:
∑
=
∑
=
=
r
1i
(u)
i
A
i
d
r
1i
(u)
i
A
z
β
β
(2)
Umin
0.5
Umax
A
1
A
2
...
A
3
A
r
0.0
1.0
Figure 2: Bell shaped membership functions of the
fuzzy model (1..r fuzzy sets).
where,
i
bb*2
i
i
i
aa
ccu
1
1
(u)A
−
+
=
β
(3)
is the membership function of the input u relative to
the fuzzy set A
i
and aa
i
, bb
i
and cc
i
are parameters
for adjust the shape and centre of the fuzzy set i.
The number of rules/number of fuzzy sets will
depend only of the complexity of the real static non-
linear function. After define the number of fuzzy
set/rules the non-linear parameters aa
i
, bb
i
and cc
i
for
all fuzzy sets and the linear parameters d
i
for i=1..r
rules should calculate.
Non-Linear Transfer Function
f(.)
G(s)
yuz
The second part of the structure of the NFHM is
the definition of the linear dynamic function G(s).
ADAPTIVE SMITH PREDICTIVE CONTROL OF NON-LINEAR SYSTEMS USING NEURO-FUZZY
HAMMERSTEIN MODELS
63
This G(s) function is an n order linear system
represented in discrete domain by equation 4
nu)ndz(k
nu
b...nd)z(k
0
b
ny)y(k
ny
a...2)y(k
2
a1)y(k
1
ay(k)
−−++−+
−++−+−=
(4)
where a
1
, a
2
, …, a
ny
and b
0
, b
1
, b
2
, …, b
nu
are the
numeric parameters of dynamic linear system. nu+1
and ny indicated the order of the regressors need for
each variable and nd is the discrete time delay.
The global mathematical equation of the NFH global
model is illustrated in equation 5.
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∑
=
−
∑
=
−
+
+
∑
=
−
∑
=
−
+
−++−+−=
r
1i
nu))-nd(u(k
i
A
i
d
r
1i
nu))-nd(u(k
i
A
nu
b
...
r
1i
nd))(u(k
i
A
i
d
r
1i
nd))(u(k
i
A
0
b
ny)y(k
ny
a...2)y(k
2
a1)y(k
1
ay(k)
β
β
β
β
(5)
3 IDENTIFICATION OF THE
NFHM
In time variant processes, the non-linear static
functions are usually fixed through time so the
parameters identification could be made off-line.
Otherwise, the linear dynamic functions could
present some changes in its dynamic behaviour so it
is better to identify its parameters on line. For the
identification of the non-linear static function the
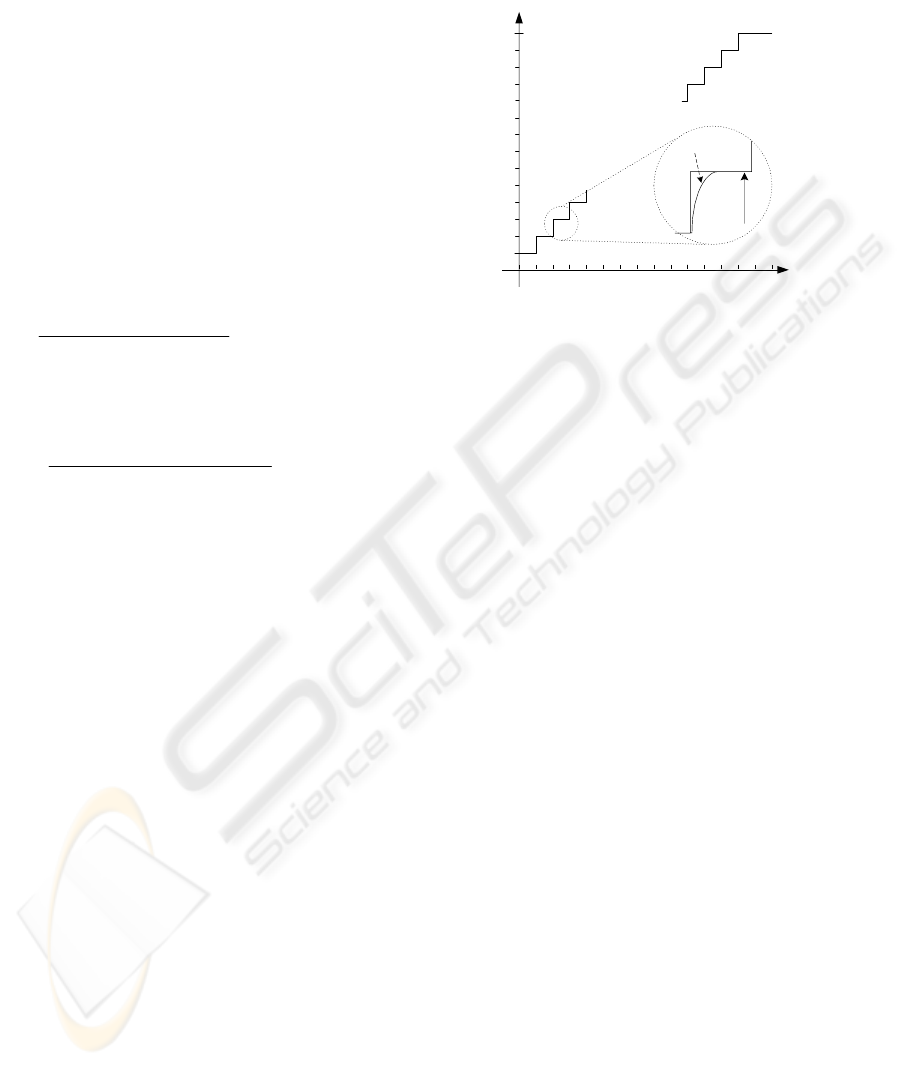
used training data should fulfil several requirements.
The control signal u(k) applied to the system should
be a step signal with a large number of steps in its
universe [Umin, …, Umax]. The large number of
steps is very important to get the exact non-linearity
of the system (number of steps depends on the non-
linearity type function). Another important
requirement is the time (number of samples) that the
step control signal should be maintained with out
any changes. This time should be long enough for
the system achieving the stationary state (at least 5
time constants of the system that achieves 99.1% of
the stationary state). The figure 3 illustrates a typical
training control signal u.
With this type of training signal it is possible to
get, first, the stationary state data for training the
non-linear static function, and second, the transitory
data for the initialisation of the dynamic linear
function.
For training the non-linear static function there
was used the two vectors with NS stationary state
samples u
ss
(k
i
) and y
ss
(k
i
) obtained as shows figure 3
Time (sec)
uUmax
Umin
...
y(k
i
)
u(k
i
)
y
i=1..NS
Figure 3: Typical training control signal.
(NS);y (2);...;y (1);yy
(NS);u (2);...;u (1);uu
ssssssss
ssssssss
=
=
(6)
For the initialisation of the dynamic linear
function it is used all (N) samples of all u (static and
dynamic samples).
y(N); y(2);...; y(1);y
u(N); u(2);...; u(1);u
=
=
(7)
The identification method imposes that all gain of
the system is included in the non-linear static
function and the dynamic linear function will have a
unitary gain, at least in the off-line training phase.
The non-linear static function is approximated by
a zero-order Takagi Sugeno fuzzy modelled. The
tuning of the parameters used in the fuzzy model can
be considered as a numerical optimisation
procedure. Among the methods that have been
implemented so far the gradient decent adaptation
method permits accurate learning of all parameters
of the fuzzy modelled. The fuzzy model is
parameterised by the following parameters.
{
}
setsfuzzy rules/nº1..r i ; d ,cc ,bb ,aa
iiii
=
=
ψ
(8)
The objective is to minimize the global prediction
vector error between the model and the plant
outputs. Therefore, the gradient decent method tends
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
64

to decrease the quadratic objective function based on
the vector error
()
1..Nllength of vectorsyy
2
1
e
2
ssmm
=−=
(9)
with z=y in stationary state, y
mm
is the
approximation output vector of the fuzzy model The
parameter set
Ψ, of the fuzzy model is changed via
the following iterative (j) learning rule:
(j)
e(j)
-(j)(j)(j)1)(j
ψ
λψψψ
ψ
∂
∂
=∆+=+
(10)
where
λ is the learning rate parameter, which
controls the learning velocity of the algorithm. The
number of iterations will depend on the decreasing
of the total vector error
∑e using the learning
vectors. When the algorithm achieves a predefine
small value or a maximum number of iterations the
iterative algorithm stops.
The partial derivatives of the model error e with
the respect to the parameters of the fuzzy model are
given by:
∑
∑
=
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
∂
∂
=
∂
∂
=
∂
∂
=
∂
∂
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
=
∂
∂
∂
∂
=∆+=+
N
l 1
i
mm
mm
di
i
i
i
N
1l
i
i
i
i
i
imm
imm
mm
mm
i
i
aaiiii
(j)d
(j)y
(j)y
e(j)
-(j)d
(j)d
e(j)
...
(j)cc
e(j)
...
(j)bb
e(j)
l)(j,aa
l)(j,A
l)(j,A
l)(j,R
l)(j,R
l)(j,Ry
l)(j,Ry
l)(j,y
l)(j,y
l)e(j,
(j)aa
e(j)
(j)aa
e(j)
-(j)aa(j)aa(j)aa1)(jaa
λ
β
β
λ
(11)
In the initialisation, the antecedent membership
functions and the consequent constant functions are
equidistantly distributed over the input and output
respective universes of discourse.
The second part of the learning algorithm is the
definition of the linear dynamic function parameters.
The first question that arises is the choice of the
order/significant regressors of the modelled. To find
the significant regressors of the system it could be
used à priori knowledge of the system or the polo-
zero cancellation method.
To estimate the initial a=a
1
, a
2
, …, a
ny
and b=b
0
, b
1
,
b
2
, …, b
nu
vectors, it was used the Least Square
algorithm.
The modification of the NFHM approach is exactly
here in the identification of the linear dynamic
parameters. In this method this parameters are
calculated on-line with recursive least square
algorithm with reset of covariance matrix
(RLSCMR) as expressed in equation 12,
[
]
[]
[
]
()
P
T
T
P
T
nu0ny1
1)P(k (k) UK(k)I
P(k)
U(k)1)P(k (k)U-
U(k)1)P(k
K(k)
1)ab(k (k)Uy(k)(k)
(k) K(k)1)ab(kab(k)
nu)-td-z(k ... td)-z(k
ny)-y(k ... 1)-y(k U(k)
(k)...b (k)b (k)a ... (k)a ab(k)
u(k) f z(k)
λ
λ
ε
ε
−−
=
−
−
=
−−=
+−=
=
=
=
(12)
where ab(k) is the vector with the instant k estimated
parameters,
λ
P
is the learning rate and P(k) is the
covariance matrix. The Reset Covariance Matrix
(RCM) algorithm is used for a fast convergence in
the identified parameters. If the error
ε(k) is bigger
than a pre-defined value the covariance matrix P is
reset (starting values).
4 ADAPTIVE SMITH PREDICTOR
CONTROL STRUCTURE
The Adaptive Smith Predictive Controller is based in
the Internal Model Controller (IMC) architecture
and is implemented in two phases. First is the off-
line estimation of the non-linear static parameters.
Second is the on-line identification of the linear
dynamic parameters updating the direct and inverse
models of the system, as illustrated in figure 4. Off-
line, with the inversion of the non-linear static
function, it is possible to transform the non-linear
plant in to an approximate “linear” plant. Finally in
closed loop control, iteration-by-iteration, the linear
dynamic parameters are recalculated and updated.
ADAPTIVE SMITH PREDICTIVE CONTROL OF NON-LINEAR SYSTEMS USING NEURO-FUZZY
HAMMERSTEIN MODELS
65
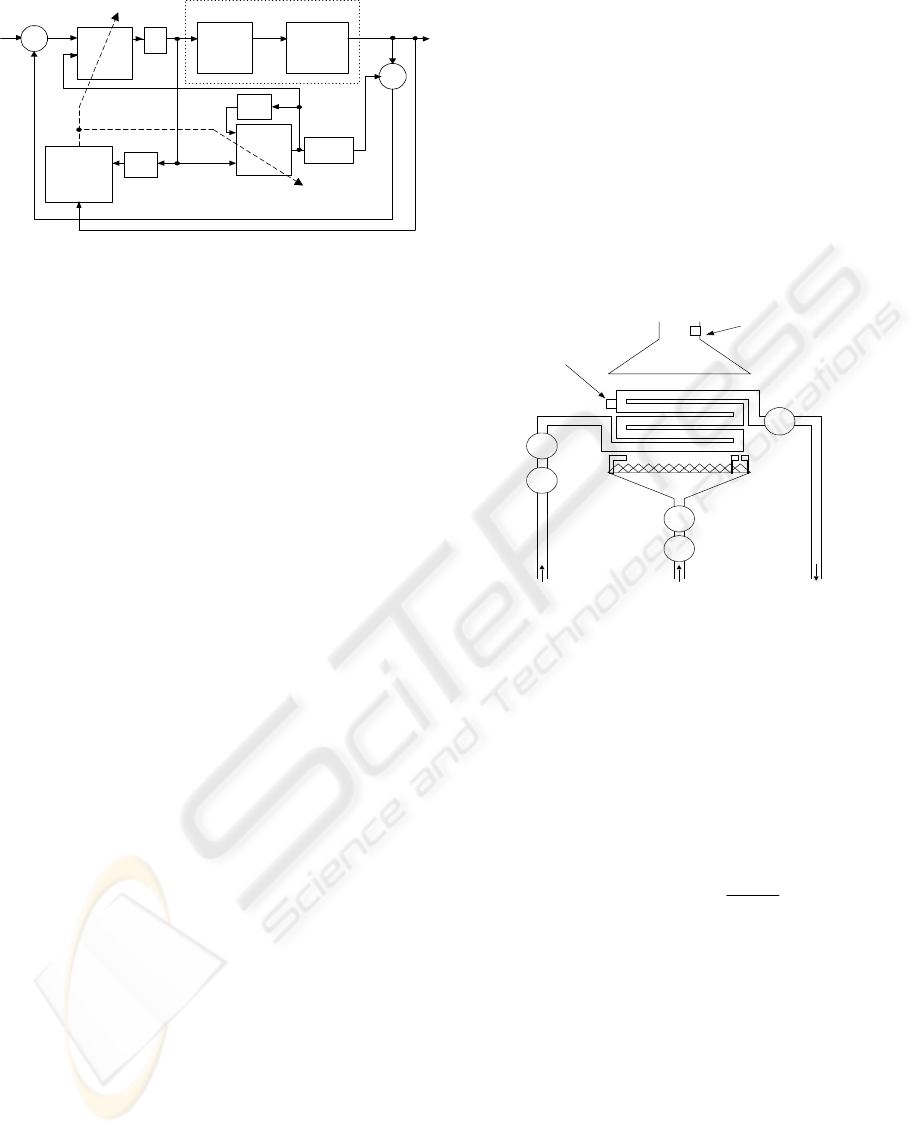
Figure 4: ASPC constituent blocks.
The ASPC separates the time-delay of the plant
from the model of the plant, so it is possible to
predict the y(k)
n steps earlier (n= digital time-
delay), compensating the negative time-delay effects
in the control results. The incorrect prediction of the
time delay may lead to aggressive control if the
time-delay is under estimated or conservative
control if the time-delay is over estimated (Tan
el
at.
, 2002).
5 ILLUSTRATIVE EXAMPLE:
GAS WATER HEATER
TEMPERATURE CONTROL
The global system has three main blocks: the gas
water heater, a micro-controller board and a personal
computer. The micro-controller board has three
modules, all controlled by the flash-type micro-
controller PHILIPS 89C51RD. The Sensors and
Actuators module is used to read and actuate the
inputs and outputs of the system. The Security
module that is used for the supervision and control
of the security conditions. The Communication
module that is used for the acquisition/monitoring of
the system data to the personal computer.
After a small description of the global system, it
will be made a small description of the gas water
heater system and its characteristics, for a detailed
description see (Vieira
el at. 2003) and it ends with
the definition, identification and comparison of the
proposed ASPC with the SPMSPC (Vieira
el at.
2004a).
5.1 System Description
The gas water heater is a multiple input single output
(MISO) system. The objective is to control the
output water temperature, called hot water
temperature (hwt). This variable depends of the cold
water temperature (cwt), water flow (wf), gas flow
(gf) (applied power) and the gas water heater
dynamics. Considering that the cold water
temperature is almost constant, the final objective is
to control the delta water temperature (
∆t)
(difference between hot and cold water
temperatures) reducing the number of inputs.
Plant
r(k)
+
-
+
-
Z
-1
Z
-1
y(k)z(k)
f
-1
(.)
u(k)
G(z)
G
-1
(z)
"Linearisation" of the plant
e(k)
RLS
with
RCM
Z
-td (k)
Z
-td (k)
The gas water heater is physically composed by a
gas burner, a permutation chamber, a ventilator, two
gas valves and several sensors used for control and
security as shown on figure 5. Operating range of
the hwt is from 30ºC to 60ºC. Operating range of the
cwt is from 5ºC to 25ºC. Finally, the operating range
of the water flow is from 3.5 to 14.5 litters/minute.
Burner
Permutation Chamber
Hot Water
Temperature
Sensor
NTC
Over Heat
Sensor
Spark
Ventilator
Exaution
Sensor
Water
Flow
Sensor
Ionization
Sensor
On-Off gas
valve
Controlled gas
valve
Gas
Cold Water Hot Water
Cold Water
Temperature
Sensor
NTC
Figure 5: Gas Water heater circuit with its sensors
and actuators.
One of the main characteristics of the gas water
heater is its Maximum static Power (MaxP). The
device used has 300 Kcal/min of maximum power.
The MaxP depends on the physic characteristics of
the permutation chamber and is given by the
equation 13.
(
)
[
]
[]
Cº
wf
MaxP
tmax Max(gf)gf
withKcal/min cwt-hwtt MaxP
=∆⇒=
∆=
(13)
The delta temperature is an unknown dynamic
non-linear function h that depends of the latest
samples of the gas flow, delta temperature and water
flow. See equation 14:
1))- wf(kny),-t(k...,
1),-t(k nu),-td-gf(k ..., td),-h(gf(kt(k)
∆
∆
=
∆
(14)
Figure 6 shows the static gas water heater
surface, where it is clear that there are two main
variables that affect directly the delta temperature,
which are the gas flow and the water flow, as
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
66
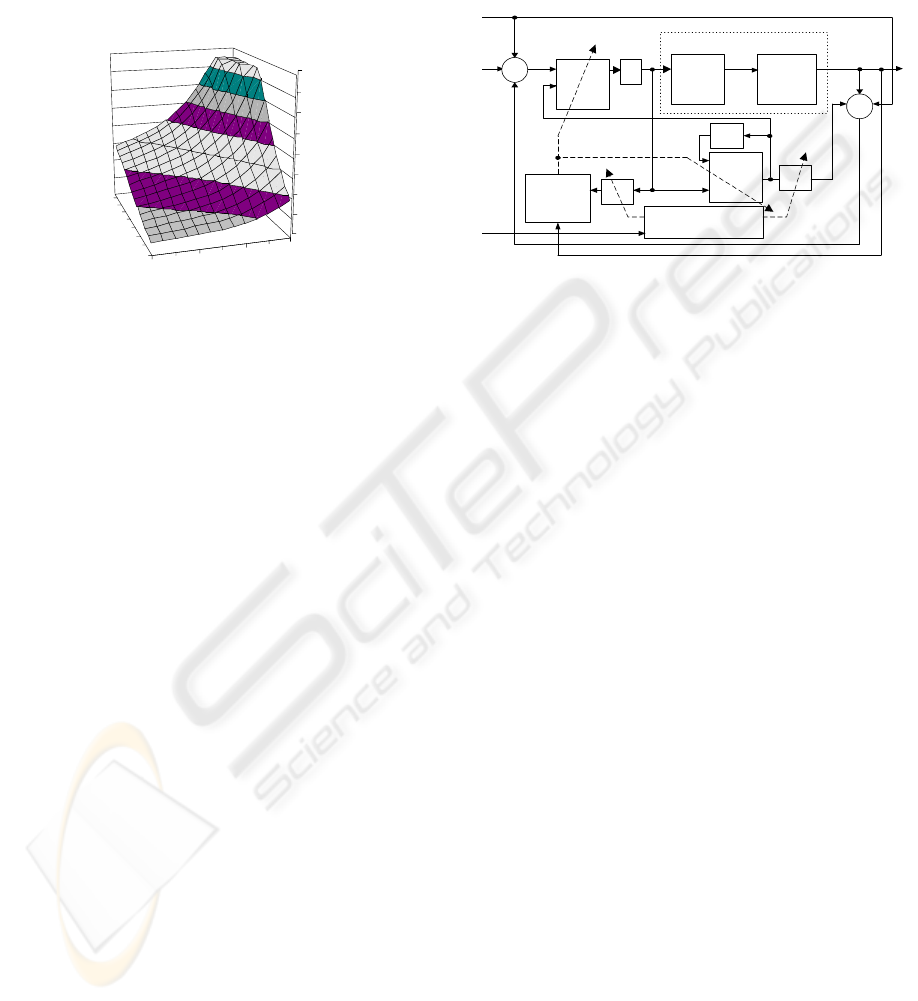
expected from equation 13. The relation between gas
flow and the delta temperature presents a weak but
important non-linearity for a specific water flow.
However, the relation between water flow and the
delta water temperature presents a strong non-
linearity for a specific gas flow.
The gas water heater plant presents a variant time
delay. The variation of the time delay function td(t)
depends mainly on the velocity of the water inside of
the tubes in the permutation chamber. The time-
delay approximation function td(k) for the one
second sampled system is illustrated in equation 15.
⎪
⎩
⎪
⎨
⎧
<
<≤
≥
=
l/min 3,5wf(k)if (sec)5
l/min 9,5wf(k)3,5if (sec)4
l/min 9,5 wf(k)if (sec)3
td(k)
(15)
5.2 ASPC specific structure and on-
line model identification
From empirical knowledge, heating systems are
usually first order systems plus a time delay, based
in this knowledge the dynamic linear part of the
NFHM will be considered a first order dynamic
function. Therefore, the dynamic linear model
function is expressed in equation 16.
td)-gf(k offunction linear -onntd)-nlgf(k
td)-nlgf(kb1)-t(kat(k)
01
=
+∆=∆
(16)
The non-linear gas flow nlgf(.) corresponds to the
f(.) non-linear function in the NFHM.
The ASPC is implemented in two steps: first, off-
line estimation of the non-linear static parameters
and second, on-line identification of the linear
dynamic parameters updating the direct and inverse
models of the plant, as illustrated in figure 7.
The Time-Delay Approximation Function updates
on-line the time delay approximation as expressed in
equation 15 and illustrated in figure 7.
40,0
60,0
80,0
100,0
14,5
12,7
10,9
9,0
7,2
5,3
3,5
2,0
22,0
42,0
62,0
82,0
Delta Temperature
(ºC)
Gas
Flow
(%)
Water Flow (l/min)
Static Gas Water Heater Surface
20,0
Figure 6: Static characterization of the gas water
heater
Plant
r(k)
+
-
+
-
Z
-1
Z
-1
hwt(k)lgf(k)
f
-1
(.)
gf(k)
G
-1
(z)
"Linearization" of the plant
e(k)
RLS
with
RCM
Z
-td (k)
cwt(k)
-
-
∆t(k)-e(k)
Z
-td (k)
G(z)
wf(k)
Time Delay
Approximation Function
Figure 7: ASPC for the gas water heater.
In this particular example the variable water flow,
changes the time constant and the static gain of the
system. Therefore, this static gain should be taking
into account in the non-linear static function
parameters calculation. The non-linear static
parameters were calculated with a constant water
flow of 9 l/m that gives a static gain of 0.873 (see
training signal). The non-linear static function
parameters calculated in (Vieira
el at. 2004b) should
be multiplied by the inverse of this particular static
gain therefore this non-linear static parameters will
be general for all water flow range.
First step is the non-linear static inverse function
parameters identification off-line. It was used a zero-
order TS fuzzy model implemented with three bell
shaped fuzzy sets that impose three simple rules.
With input universes of discourse normalized and
using the training and test data sets used in the
NFHM approach exposed in (Vieira
el at., 2004b)
the zero-order TS fuzzy model parameters are:
aa
1
=0.274, bb
1
=1.614, cc
1
=-0.023, d
1
=0.1717,
aa
2
=0.352, bb
2
=2.060, cc
2
=0.515, d
2
=0.666,
aa
3
=0.407, bb
3
=2.125, cc
3
=1.008 and d
3
=1.249.
After the non-linear static inverse function
parameters calculus the initial linear parameters are
calculated using the LS algorithm. The initial linear
dynamic identification parameters found are
a
1
=0.790 and b
0
=0.210.
Finally, iteration-by-iteration, the linear dynamic
parameters are recalculated, updating the proposed
ASPC based in NFHMs.
ADAPTIVE SMITH PREDICTIVE CONTROL OF NON-LINEAR SYSTEMS USING NEURO-FUZZY
HAMMERSTEIN MODELS
67
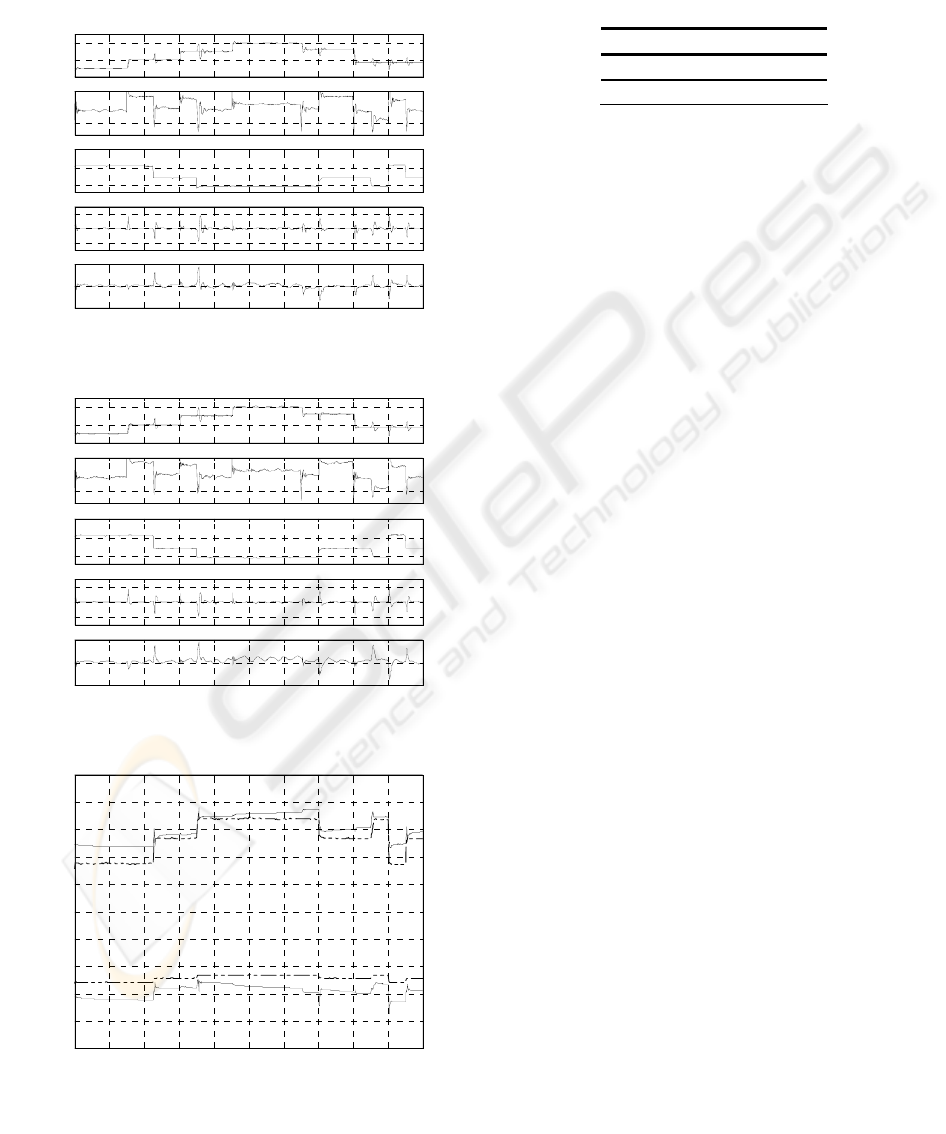
5.3 Comparative results using the
ASPC and SPMSPC
For the comparison of the two controllers, ASPC
and SPMSPC, the references hot water temperature
and water flow variables were applied and the
respective mean square errors (MSE) were
calculated r(k-td)-y(k). It was used r(k-td) to avoid
the error introduced by the time delay. The final
results are expressed in table 1.
0 100 200 300 400 500 600 700 800 900 1000
20
40
60
r and hwt (ºC)
0 100 200 300 400 500 600 700 800 900 1000
50
100
gf (%)
0 100 200 300 400 500 600 700 800 900 1000
5
10
15
wf(l/min)
0 100 200 300 400 500 600 700 800 900 1000
-10
0
10
Time(seconds)
e (ºC)
0 100 200 300 400 500 600 700 800 900 1000
-10
0
10
r-hwt (ºC)
Figure 8: ASPC results
0 100 200 300 400 500 600 700 800 900 1000
20
40
60
Table 1: Mean square errors of the two controllers
Algorithm MSE
ASPC 1.858
SPMSPC 1.953
As can be seen from the results both architectures
ASPC and SPMSPC achieve good results. But the
SPMSPC approach is not an adaptive model
controller approach, therefore, it can be seen in
Figure 9 that there is an error between the direct
model and the real plant. The cause that is
responsible for the difference between the model and
the plant is called load. This load induced a worst
control performance.
The ASPC approach is an adaptive model
controller approach, therefore, it can be seen in
Figure 8 that there is no load in the system.
However, the control results are affected by the
tuning time and variation of the linear parameters.
In Figure 10 it can be seen that the linear dynamic
parameters are similar in both controllers. The small
differences observed became from the possible non-
optimal parameters achieved with the genetic
algorithms in the SPMSP and from the on-line
adaptation of the linear dynamic parameters with a
continues variation of the time delay that was
approximated to the discrete time by equation 15.
6 CONCLUSIONS AND FUTURE
WORK
This work presents a new model based Smith
predictive adaptive controller using Hammerstein
neuro-fuzzy model identification. It presents a new
and simple method for the neuro-fuzzy Hammerstein
model on-line identification and its generalisation.
The NFHM approach uses a zero-order Takagi-
Sugeno fuzzy model to approximate the non-linear
static function that is tuned off-line using gradient
decent algorithm and to identify the linear dynamic
function it is used the Recursive Least Square on-
line estimation with Covariance Matrix Reset
(RLSCMR). The CMR algorithm is used for a faster
convergence of the identified parameters because if
the load presents big changes the parameters should
r and hwt (ºC)
0 100 200 300 400 500 600 700 800 900 1000
50
100
gf (%)
0 100 200 300 400 500 600 700 800 900 1000
5
10
15
wf(l/min)
0 100 200 300 400 500 600 700 800 900 1000
-10
0
10
Time(seconds)
e (ºC)
0 100 200 300 400 500 600 700 800 900 1000
-10
0
10
r-hwt (ºC)
Figure 9: SPMSPC results
0 100 200 300 400 500 600 700 800 900 1000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Linear Parameters - a1 b0
Time(seconds)
Figure 10: On-line parameters variation.
(
ASPC continues line and SPMSPC dot line
)
.
ICINCO 2004 - SIGNAL PROCESSING, SYSTEMS MODELING AND CONTROL
68

have a fast and stable change too, maintaining the
robustness of the controller.
Finally, the proposed ASPC and SPMSPC control
approaches were successful applied to an illustrative
example: gas water heater system. The ASPC
achieve better control results than the SPMSPC
because, even when the load (water flow / maximum
power) changes the dynamic of the system, the
linear parameters will adapt then selves. The
SPMSPC was optimise for a fixed maximum power
so if the maximum power changes the control results
will be worse than the ones achieved with the ASPC.
REFERENCES
Abonyi J., Babuska R., Botto M., Szeifert F., Nagy L.
2000. Identification and Control of Non-linear
Systems Using Fuzzy Hammerstein Models. Industrial
Engineering and Chemistry Research , vol. 39, no. 11,
pp. 4302-4314.
Abonyi J., Nagy L., Szeifert F., 1999. Adaptive Fuzzy
Inference System and its Application in Modelling and
Model Based Control
, Chemical Engineering Research
and Design, vol. 77A, pp. 281-290.
Abonyi J., Bódizs A., Nagy L., Szeifert F., 2000b. Hybrid
Fuzzy Convolution Model and its Application in
Model Predictive Control, Chemical Engineering
Research and Design, vol. 78(A), pp. 597-604.
Fink A., Nelles O., Fischer M. and Isermann R., 2001.
Nonlinear Adaptive Control of a Heat Exchanger,
International Journal of Adaptive Control and Signal
Proc., vol. 15(8), pp. 883-906.
Potmann M., Seborg D. 1997. A Nonlinear Predictive
Control Strategy Based on Radial Basis Function
Models
, Computers Chemistry Engineering, vol. 21
(9), pp. 965-980.
Tan Y., Nazmul Karim M., 2002. Smith Predictor Based
Neural Controller with Time Delay Estimation,
Proceedings of 15th Triennial World Congress, IFAC.
Tan Y., Cauwenberghe A., 1999. Neural Network Based d
steps ahead Predictors for Non-Linear Systems with
Time Delay, Engineering Applications of Artificial
Intelligence, vol. 12(1), pp. 21-35.
Vieira J., Mota A., 2003. Smith Predictor Based Neural
Fuzzy Controller Applied in a Water Gas Heater that
Presents a Large Time-Delay. Proceedings of IEEE
International Conference on Control Application, vol.
1, pp. 362-367.
Vieira J., Mota A., 2004a. Water Gas Heater Non-Linear
Physical Model: Optimisation with Genetic
Algorithms. Proceedings of IASTED 23
rd
International
Conference on Modelling, Identification and Control,
February 23-25, vol. 1, pp. 122-127.
Vieira J., Mota A., 2004b. Parameter Estimation of Non-
Linear Systems with Hammerstein Models Using
Neuro-Fuzzy and Polynomial Approximation
Approaches, Proceedings International Conference on
Fuzzy Systems IEEE-FUZZ 2004, July 25-29,
(accepted).
ADAPTIVE SMITH PREDICTIVE CONTROL OF NON-LINEAR SYSTEMS USING NEURO-FUZZY
HAMMERSTEIN MODELS
69
