
MANAGEMENT OF A MULTICAMERA TRACKING SYSTEM
C. Motamed and R. Lherbier
Laboratoire LASL EA 2600
Université du Littoral Côte d'Opale
Bat 2, 50 Rue F.Buisson
62228 Calais France
Keywords: Visual-surveillance, Multi-camera, Tracking, Sensor Management.
Abstract: This work is linked with the context of human activity monitoring and concerns the development of a multi-
camera tracking system. Our strategy of sensors combination integrates the contextual suitability of each
sensor with respect to the task. The suitability of a sensor, represented as a belief indicator, combines two
main criteria. Firstly it is based on the notion of spatial “isolation” of the tracked object with respect to other
object and secondly on the notion of “visibility” with respect to the sensor. A centralized filter combines the
result of the local tracking estimations (sensor level) and then performs the track management. The main
objective of the proposed architecture is to deal with the limitation of each local sensor with respect to the
problem of visual occlusion.
1 INTRODUCTION
The development of vision-based system carrying
out the monitoring of a global scene is an interesting
field of investigation. Indeed, motivations are
multiple and concern various domains as the
monitoring and surveillance of significant protected
sites, the control and estimation of flows (car parks,
airports, ports, and motorways). Because of the fast
evolution in the fields of data processing,
communications and instrumentation, such
applications become possible. Such systems are also
helpful for automatic analysing of the sport activity.
This work concerns the development of a system
for tracking of object from multiple fixed cameras.
The tracking results based on the trajectories of
objects permit to automatically estimate some
specific individual or complex group behaviour.
These tools allows a better understanding of athletes
or team in order to propose an adapted training
sequence or also to choose efficient tactical
decisions with respect to a specific player or team.
Such systems are useful for many sport activities as
football, basketball, tennis etc. Other general utilities
of these systems are the annotation for video
database and the learning of human behaviour for
the industry of simulation and digital games.
Research challenges for development of these
systems are multiples. From the detection and
tracking points of view, difficulties concern: the
detection artefact, the changing speed and direction
of players and the problem of occlusion.
For wide area monitoring, single visual sensor is
not generally sufficient. To maximize the
capabilities and performance, it is often necessary to
use a variety of sensor devices that complement each
other. The approach presented in this paper concerns
an approach of high level multi camera
management. It is defined as a process that seeks to
manage the usage of a suite of camera or
measurement devices in a dynamic and uncertain
environment, for to improve the performance of the
perception.
The basic objective of sensor management may
be the automatic tuning of internal parameter of a
single sensor or a set of sensor with respect to a
given task. A more general problems of multisensor
management are, related to decisions about what
sensors to use and for which purposes, as well as
when, where and how to use them. This last side of
high level management is linked with the concept of
active perception strategy (
Bajcsy, 1988).This
strategy is particularly adapted where real-time
571
Motamed C. and Lherbier R. (2006).
MANAGEMENT OF A MULTICAMERA TRACKING SYSTEM.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 571-576
DOI: 10.5220/0001221105710576
Copyright
c
SciTePress
performance is needed such as tracking, robot
navigation, surveillance, visual inspection.
The active perception has been widely developed
for designing the perception for mobile robotic.
These systems and their adaptation capabilities offer
a way to face those problems that were not solved
adequately with conventional techniques. In fact
real-time perception systems have theirs limitation
in the computation of massive amount of input data
with processing procedures in a reduced and fixed
amount of time. This active strategy has the capacity
to filter data and to focus the attention of the
perception to relevant information or sensors and
also can choose the best alternative by using the
contextual information. Such proposed approach are
clearly linked with the design of cognitive system
which permits to combine knowledge and reasoning
in order to develop smart and robust perception
system.
In order to perform the high level management, it
is essential to characterize each sensor with respect
to its utility for the task. Generally the main
characterization of the sensor is given by the
measurement uncertainty. Many sensors have a
variable uncertainty with respect to their functioning
condition. And generally it is difficult to model the
uncertainty globally. Another important
characterization feature concerns the field of
coverage of the sensor.
Tracking is an important task of computer vision
with many applications in surveillance, scene
monitoring, navigation, sport scene analysis and
video database management. One of the most critical
parts of a multi-object-tracking algorithm is the data
association step. It has to deal with new objects,
short or long term disappearing objects and
occlusions.
Qualitative approaches are a, alternative for
motion correspondence (Rangarajan, 2001) (Sethi,
90) (Veenman, 2001). These approaches are less
normative than conventional statistical methods used
in tracking. The main advantage is their flexibility,
because they permit an easy integration of several
forms of a priori information and contextual
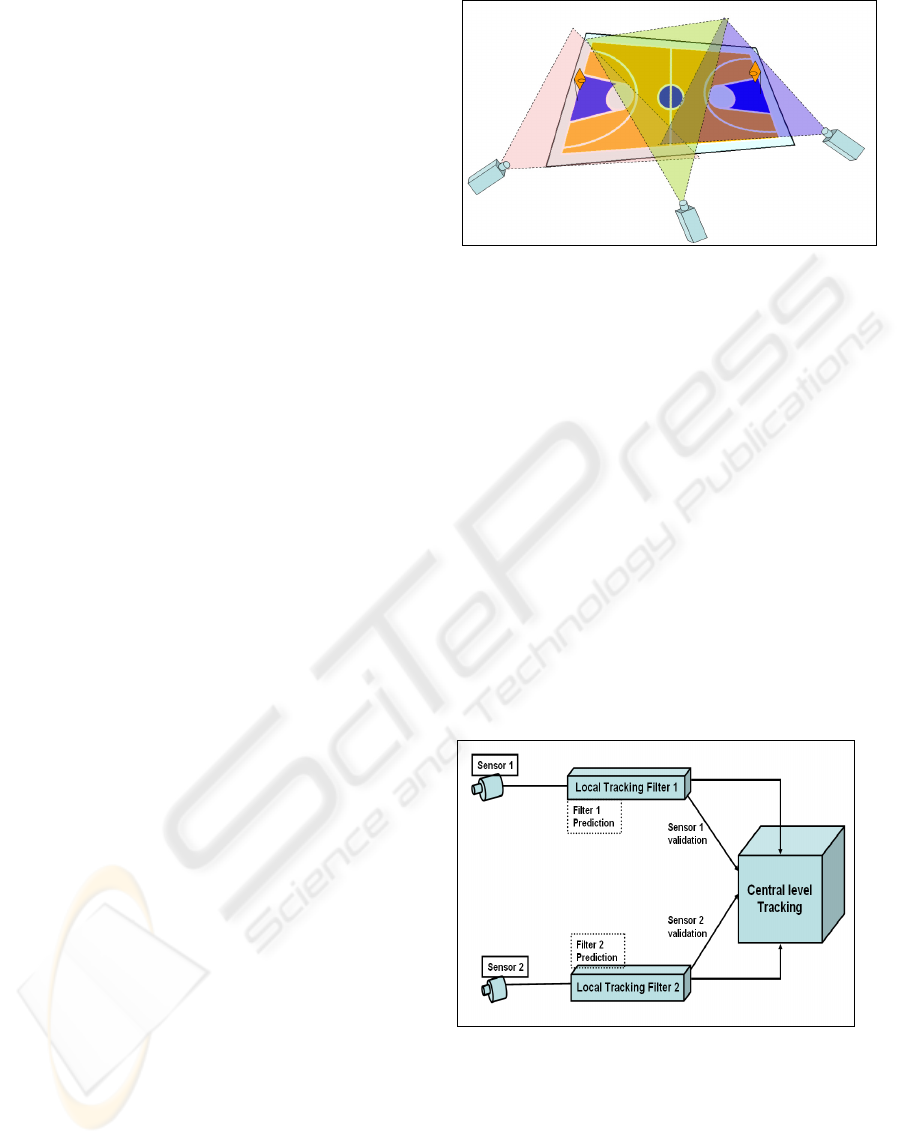
information for constraining complex problem. Our
approach belongs to the last category. In this work,
vision sensors are distributed at different locations of
the scene in a redundant and complementary manner
(figure 1).
Figure 1: Distributed sensing architecture.
Our strategy of sensor combination integrates
contextual information for representing the
suitability of each sensor for the task. The suitability
of a sensor combines two main criteria. Firstly it is
based on the notion of spatial “isolation” with
respect to other object and secondly on the notion of
“visibility” with respect to the sensor.
Related works linked with the tracking of humans
and vehicles with multiple visual sensors are
numerous (Foresti,1995) (Utsumi, 1998) (Nakazawa,
1998) (Snidaro, 2004). The main contribution of this
work is the manner of how the system controls the
sensor information flow in order to improve the
quality of the global tracking. The proposed system
uses a hierarchical approach presented in the figure
2. A central level tracker uses results of local tracker
associated with each sensor.
Figure 2: The global architecture of the tracking system.
The section 2 presents the local tracking unit. The
Section 3 concerns the central level part of our
tracking system. The Section 4 shows some
experimental results by using a real multi-camera
image sequence.
ICINCO 2006 - ROBOTICS AND AUTOMATION
572

2 LOCAL VISUAL TRACKING
2.1 Detection and Tracking Strategy
The proposed local tracker basically uses a region-
based approach. The tracking algorithms use
cinematic and visual constraints for establishing
correspondence. In our problem of object tracking
for a visual-surveillance application, observations
representing the detected regions are complex and
are not corrupted by random noise only. They are
also affected by detection errors, merging and
splitting artefacts, which are difficult to model
globally or statistically. In addition, the dynamic
model of human activity may present significant
variability according to the working context. For all
these reasons, we have chosen a qualitative
approach, which focuses mainly on data association
quality rather than high precision object motion
estimation. Assumptions underlying our approach
concern several points: objects move smoothly from
a frame to another, objects do not change rapidly
their appearance colour; objects can interact with
other objects or groups of objects. The Tracking
algorithm uses globally the Nearest Neighbour (NN)
strategy. However, in the presence of merging or
splitting situations two specific procedures are
launched in order to solve the association ambiguity.
The detection of moving objects is performed by
comparing the three RGB components:
))()(max(
1
,,
ω
>−
−
=
PRPIif
k
c
k
c
BGRc
1)( =→ PD
k
(1)
0)( =→ PDelse
k
D
k
represents the detection decision (1: moving
object, 0: background). The parameters
ω is the
inter-frame detection threshold and the stability
elementary step. The parameter
ω is adjusted to
twice the median absolute deviation of image noise
estimated over a preliminary training sequence (
ω=
20 with 8bits/color channel). The raw motion
detection result generally presents many artefacts.
Two kinds of cleaning procedures are applied.
Firstly, we use standard morphological operations of
erosion and dilatation for reducing noise in the
foreground. Then, too small uninteresting image
regions are removed. In our algorithm this size
threshold is defined globally in an empirical manner
for the entire image sequence.
In order to perform the tracking step, a Kalman
filter is attached to each detected object (Position
state, and speed as a hidden state), and the
information obtained by the filter, is used to predict
the position of the object on the next frame. For each
detected region, three visual features are computed:
centre of gravity, bounding box, and colour
histogram. Colour histogram in particular, has many
advantages for tracking non-rigid objects as it is
robust to partial occlusion, is rotation and scale
invariant and is computed efficiently. The histogram
is reduced to 32 bins per colour channel in order to
reduce the information quantity. However, in the
context of multi-player sports based on teams, the
colour information will mainly discriminate teams
and in a lower manner individual players of the same
team. However in the context of the basketball, or
foot ball the mutual physical interactions mainly
occur between players of opposite teams.
The matching is based on the spatial proximity of
regions and their visual compatibilities. The
algorithm evaluates explicitly the quality of each
association. This information is summarized by a
specific belief indicator called “consistency”
indicators. The indicator is recursively updated and
stored during the tracking step.
The consistency indicator of tracked objects
firstly permits effective new objects to be validated
after consecutive observations. Secondly, it permits
to tolerate some temporary loss of the objects having
a reliable track. It reacts as a robust filter at the
object level. The indicator increases when no
significant variation in the object features (colour
and bounding box size and the speed vector) is
perceived. Otherwise or in extreme situations when
the target is lost, indicator is decreased. The
dissimilarity between the object colour histograms is
performed by the Bhattacharya distance.
The updating process of the consistency indicator
of each tracked object is controlled in terms of fixed
time delay. The track termination is decided for lost
objects after a defined period of consecutive zero
value consistency indicator.
The maintenance of the identity of each object is
performed only when the object is present in front of
the camera view. The track of the object is also
terminated when it goes out of the field.
MANAGEMENT OF A MULTICAMERA TRACKING SYSTEM
573

2.2 Merging and Splitting Procedure
An important difficulty of visual tracking is when
objects come to merge from the camera viewpoint.
This merging situation is immediately detected by
testing the intersection of predicted object bounding
box and the size variation of the newly detected
region. When a merging situation is detected, firstly
a notion of a temporary group of objects is defined
in order to track the global region containing
visually merged objects. Each group is considered as
a new specific entity to track with its indicators. In
addition to the temporary group tracking, the
algorithm attempts to maintain the track of each
individual object inside the global group region. The
estimation of position of individual objects during
the merging situation is based on their appearance
model. We have chosen the mean shift algorithm.
This algorithm has been adopted as an efficient
technique for appearance-based blob tracking
(Comaniciu
, 2000). The mean-shift algorithm is a
nonparametric statistical method for seeking the
nearest mode of a point sample distribution (
Cheng,
1995). The dissimilarity between the object model
and the object candidates is performed by the
Bhattacharya distance. In the normal mode, the
algorithm stores continuously the latest sub-image of
each object obtained from the motion detection
stage. It permits, at the beginning of the merging
situation, to get ready the initial object model useful
for the mean shift algorithm.
In some situation, an object may be hidden
entirely or partially by another one, so that the object
can not be located by its appearance. In order to
maintain a tracking continuity in all situations for
each merged object, the notion of the artificial
observation is introduced. It is positioned for each
object, on an estimated location P* which is
obtained by a weighted combination of the best
appearance position Pa and the global group position
Pg.
g
a
PwwPP ).1(.
*
−+=
(2)
The weight w is a normalised distance between
the object model and the best location candidate
obtained from the appearance approach. In this
strategy, when the object cannot be identified by the
appearance approach, the group position is favoured.
During merging, the history of each tracked
object included in a group (positions and indicators)
is continuously updated by means of its artificial
observation. This approach of compound
observation is close to the PDAF algorithm (Bar-
Shalom 1988) which combines the influence of
multiple candidates in the validation gate. During
the merging situation the consistency indicator of an
object is updated only by taking into account the
speed stability, estimated thanks to its artificial
observation. If during tracking a sole object joins a
group, the initial group with updated objects is
maintained. The global procedure during the
merging situation may be relatively time-consuming.
So the decision of group creation is robustly
validated once it has been predicted by using the
proximity of consistent tracked objects. It permits to
tolerate efficiently some fugitive false-detections.
On the other hand, this last strategy cannot initialise
a group if one of the merged objects is newly created
and has a low consistency indicator. In this last case
one object is only considered and no group is
created.
As in the merging situation, the splitting has to be
detected immediately. The Splitting situation is
detected once a new object is detected close to a
temporary group region. In order to reduce the
influence of some detection errors when a real sole
object or a group is split by the motion segmentation
errors during a short delay, the decision of splitting
is provided only when it is confirmed during a fixed
time delay (1 second in this implementation).
When the algorithm detects split regions
associated to a known group, a specific procedure
focuses its attention toward the identity of objects.
After splitting, the group updates its individual
object. When the group is reduced to a known sole
object, the group entity is destroyed.
A visual comparison between objects before
merging and after splitting permits to affect the best
object identity for each region. When a region
considered as a sole object splits, separated detected
regions are associated with new objects and inherit
the history of the initial object (previous tracks
position and consistency indicators).
3 CENTRAL LEVEL TRACKING
From a multi-sensor organization, we have chosen
the hierarchical approach. A centralized filter
combines the results of the local tracking filters
(sensor level) and then performs the track
management (Fig. 2). The sensor validation
indicator is computed at the predictive location of
ICINCO 2006 - ROBOTICS AND AUTOMATION
574

the tracked object obtained by the sensor level
estimator.
A planar homography transformation HS is
performed in order to bring each local estimation
from sensor ‘s’ into the same reference plan R0. The
position in image concerns the position of player on
the ground plane obtained by the lower segment of
the object bounding box. The sensor validation
information permits to guide the tracking process by
a context driven strategy. It controls the combination
of local trackers through the central level tracking.
The validation is represented by a confidence value
for each current tracked object and is based on
dynamic contextual information with respect to each
sensor. The main objective is to favor the best views
with respect to dynamic occlusion of each tracked
object. The sensor validation indicator represents a
notion of suitability of a sensor for the tracking of a
defined object. This validation indicator clearly
favor un-occluded tracked object with respect to the
camera views.
For each object with respect to each sensor ‘s’,
the indicator (
λs) is set to its maximum=1 if the
tracked object is known as sole object from the local
sensor. When the object goes out of the field of the
sensor the indicator takes the zeros value. In
presence of occlusion, highlighted by the notion of
group managed by the local sensor ‘s’, the indicator
takes the degree of visibility : ws estimated during
the merging procedure of local tracker (section2.1).
The central level tracker based on a Kalman filter
uses the result of local trackers (positions P*s and
indicators) as its observation. Before filtering, it
performs a combination of these observations
weighted by their validation indicators in order to
generate a fused position Pglobal.
∑
∑
=
s
ss
S
s
s
global
PHP
λ
λ
).(.
1
*
(3)
4 EXPERIMENTATIONS
We present in this section some experimental results
of our multi-camera tracking system. The
experimentation is based on a real competition of
basket-ball recorded from two distant wide angle
views during 20 min. The application permits in
particular to estimate the total length of the whole
trajectory covered by each team.
The figure 3 illustrates the complementarity of
the two views and shows an instantaneous result of
local tracking and also the notion of group with
respect to each view.
We have study the performance of our multi-
camera tracking system with respect to our
evaluation video sequence. The evaluation is
focused on the data association step with respect to
the notion of confusion of identity of players. The
comparison is performed between the result of local
trackers and the global tracker. In our system the
local trackers do not maintain a global identity
during the whole sequence. Each object (player) is
initialised when it enters in the field of the camera.
So, for the local tracker, we count only local errors
of association occurring during the presence of the
object in the field of the camera. The result of this
evaluation from of this experimentation is
satisfactory (Table 1). It shows in particular that the
majority of occlusion containing the same objects
does not occur simultaneously under the two
distributed views. Figure 3 illustrates a case of such
situation when the same player belongs to a group
from each view.
Figure 3: An illustration of local tracking from two views.
MANAGEMENT OF A MULTICAMERA TRACKING SYSTEM
575

Table 1: Performance evaluation with respect to the
identity confusion.
Tracking level Local
tracking
Left
camera
Local
tracking
Right
camera
Central
level
tracking
Number of object
identity confusion
32 26
14
Number of object
in group
132 115 --
Number of objects
simultaneously
appearing in a
group from 2 views
31 31 --
5 CONCLUSION
The development of a tracking system from multiple
fixed cameras is helpful for many applications in the
domain of surveillance or monitoring. Our strategy
of sensor combination integrates contextual
information for representing the suitability of each
sensor. The main advantage of our qualitative
motion correspondence and sensor selection is its
capacity to cope naturally with known modelled
tracking ambiguities. At the local level the tracking
takes into account the regions merging, splitting, and
target missing. At the central level the tracking
solves a good part of occlusions. The use of the
sensor validation from local tracker permits in an
active manner, to focus the central level, on
appropriate information.
ACKNOWLEDGEMENTS
This work is supported by the Nord/.Pas de Calais,
French Regional Council and FEDER (European
funding for regional development) in the context of
the RaVioLi Project.
REFERENCES
Bajcsy R. 1988, Active Perception, Proceedings of the
IEEE, 76(8):996-1005.
Bar-Shalom Y. & Forthmann T.E, 1988, Tracking and
data association. Academic Press
Cheng Y. 1995, Mean Shift, Mode Seeking, and
Clustering. IEEE Trans. Pattern Analysis and
Machine Intelligence, Vol 17(8), pp.790-799.
Comaniciu D., Ramesh V, and Meer P. 2000, Real-
TimeTracking of Non-Rigid Objects using Mean Shift.
IEEE Computer Vision and Pattern Recognition, Vol
II, , pp.142-149.
Foresti G.L., Murino V., Regazzoni C., and. Vernazza G.
1995,A multilevel fusion approach to object
identification in outdoor road scenes. International
Journal of Pattern Recognition and Artificial
Intelligence, 9(1):23–65,.
Nakazawa A., Kato H., and Inokuchi S.. 1998 Human
tracking using distributed vision systems. In
Proceedings of the 14
th
ICPR, pages 593–596,.
Rangarajan K. and Shah M., 1991. Establishing Motion
Correspondence. CVGIP: Image Understanding, 54
(1), pp. 56-73.
Sethi I.K. and Jain. R., 1990. Finding trajectories of
feature points in a monocular image sequence. IEEE
Transaction on Pattern Analysis and Machine
Intelligence, 9 (1), 56-73.
Snidaro L., Luca Foresti G., Niu R., Varshney P. K., 2004.
Sensor fusion for video surveillance, International
Conference on Information Fusion 2004, pp. 739-746,
Sweden.
Utsumi A., Mori H., Ohya J., and M. Yachida. 1998,
Multiple view-based tracking of multiple humans. In
Proceedings of the 14th ICPR, pages 597–601.
Veenman C.J. and Reinders M.J.T. and E.Backer 2001.
Resolving Motion Correspondence for Densely
Moving Points. IEEE Transactions on PAMI vol23,
pp54-72.
ICINCO 2006 - ROBOTICS AND AUTOMATION
576
