
VISUAL BASIC APPLICATIONS FOR SHAPE MEMORY
ELEMENTS DESIGN USED IN INTELLIGENT SYSTEMS
Sonia Degeratu, Petre Rotaru, Horia Octavian Manolea
Faculty of Electromechanical Engineering and Faculty of Physics, University of Craiova, Romania
Faculty of Dentistry, University of Medicine and Pharmacy, Craiova, Romania
Gheorghe Manolea, Anca Petrisor, Bizdoaca Nicu George
Faculty of Electromechanical Engineering and Faculty of Automation, University of Craiova, Romania
Keywords: Shape memory alloy, austenite phase, martensite phase, cantilever strip, helical spring.
Abstract: The paper presents the design strategies for two typical configurations of intelligent systems, using as active
elements the Shape Memory Alloy (SMA) cantilever strip and the SMA helical spring. Based on the
advantages and unique properties of shape memory alloys the authors defined the operating mode, the
mechanical considerations and the design assumptions for these two examples. It also includes the
experimental results of thermal analysis in order to determine the transformation temperatures for studied
SMA elements. A comprehensive graphical interface, which runs under Visual Basic environment, has been
developed for each design strategy. Each one provides a user friendly environment that allows intelligent
system parameters configuration as well as the choice of the most adapted analysis methods and data
displaying. At this moment, these two Visual Basic applications are used for engineering purposes as well
as didactical ones.
1 INTRODUCTION
The shape memory alloys (SMA's) possess the
ability to undergo shape change at low temperature
and retain this deformation until they are heated, at
which point they return to their original shape (Van
Humbeeck, 2001), (Waram, 1993).
The unique behavior of SMA’s (e.g. shape
memory effect, pseudo-elasticity) is based on the
temperature-dependent austenite-to-martensite phase
transformation on an atomic scale, which is also
called thermoelastic martensitic transformation.
The SMA’s can exist in two different
temperature-dependent crystal structures (phases)
called martensite (lower temperature) and austenite
or parent phase (higher temperature).
When martensite is heated, it begins to change
into austenite and the temperatures at which this
phenomenon starts and finishes are called austenite
start temperature (As) and respectively austenite
finish temperature (Af). When austenite is cooled, it
begins to change into martensite and the
temperatures at which this phenomenon starts and
finishes are called martensite start temperature (Ms)
and respectively martensite finish temperature (Mf).
SMA’s have been extensively studied as
functional materials for a wide range of applications:
robotics, actuators, automobiles, aerospace, military
field, medicine, toys, electronics, optical industry,
constructions, agroalimentary sector (Degeratu,
2003), (Dolce, 2001), (Van Humbeeck, 1999).
The use of SMA’s can sometimes simplify a
mechanism or device, reducing the overall number
of parts, increasing reliability and therefore reducing
associated quality costs. Moreover, their functioning
can be scheduled and controlled by establishing an
adequate strategy in respect to the operating mode
(Bizdoaca, 2006), (Petrisor, 2007).
2 CHARACTERISTICS OF SMA’S
The thermoelastic martensitic transformation causes
the folowing main properties of SMA’s: one-way and
two-way shape memory effect, hysteresis behavior,
superelasticity, vibration damping capacity (Dolce,
207
Degeratu S., Rotaru P., Octavian Manolea H., Manolea G., Petrisor A. and Nicu George B. (2008).
VISUAL BASIC APPLICATIONS FOR SHAPE MEMORY ELEMENTS DESIGN USED IN INTELLIGENT SYSTEMS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 207-210
DOI: 10.5220/0001500802070210
Copyright
c
SciTePress
2006), (Waram, 1993), (Van Humbeeck, 2001). The
two applications presented in this paper are mainly
using the two-way shape memory effect representing
the ability of SMA's to recover a preset shape upon
heating above the transformation temperatures and to
return to a certain alternate shape upon cooling.
3 DESIGN STRATEGIES FOR
SMA ELEMENTS
The first step an engineer should take when
undertaking a design involving shape memory
material is to clearly define the design requirements.
This article includes the design strategies for the
SMA cantilever strip and for a SMA spring working
against a conventional steel spring (referred to in
this case as the “biasing” spring). In both design
models the friction effect is neglected and a linear
stress-strain behavior is assumed (Nasser, 2005).
3.1 Operating Modes of SMA’s
The most used operating modes of SMA's are: free
recovery, constrained recovery and work production.
The two Visual Basic applications presented in
this paper use a work production operating mode. In
this kind of operating mode a shape memory
element (SME), such as a strip or a helical springs,
works against a constant or varying force to perform
work. The element therefore generates force and
motion upon heating.
3.2 Transformation Temperatures
SMA’s exhibit a large temperature dependence on the
material shear modulus, which increases from low to
high temperature. Therefore, as the temperature is
increased the force exerted by a SME increases
dramatically (Dolce, 2001), (Nasser, 2005).
This section presents the transformation
temperatures obtained for the studied SMA elements
(strip and helical spring) using Thermal Analysis
Methods. Ni-Ti-Cu (Raychem proprietary alloy) is
the material used for the two SMA elements.
Thermogravimetric Analysis (TGA), Differential
Thermal Analysis (DTA) and Differential Scanning
Calorimetry (DSC) methods were used to determine
the required parameters. The measurements were
carried out on a Perkin Elmer Thermobalance in
dynamic air atmosphere, showing that the sample’s
mass does not undergo any changes at heating and
cooling. In consequence, the TGA curves are ignored.
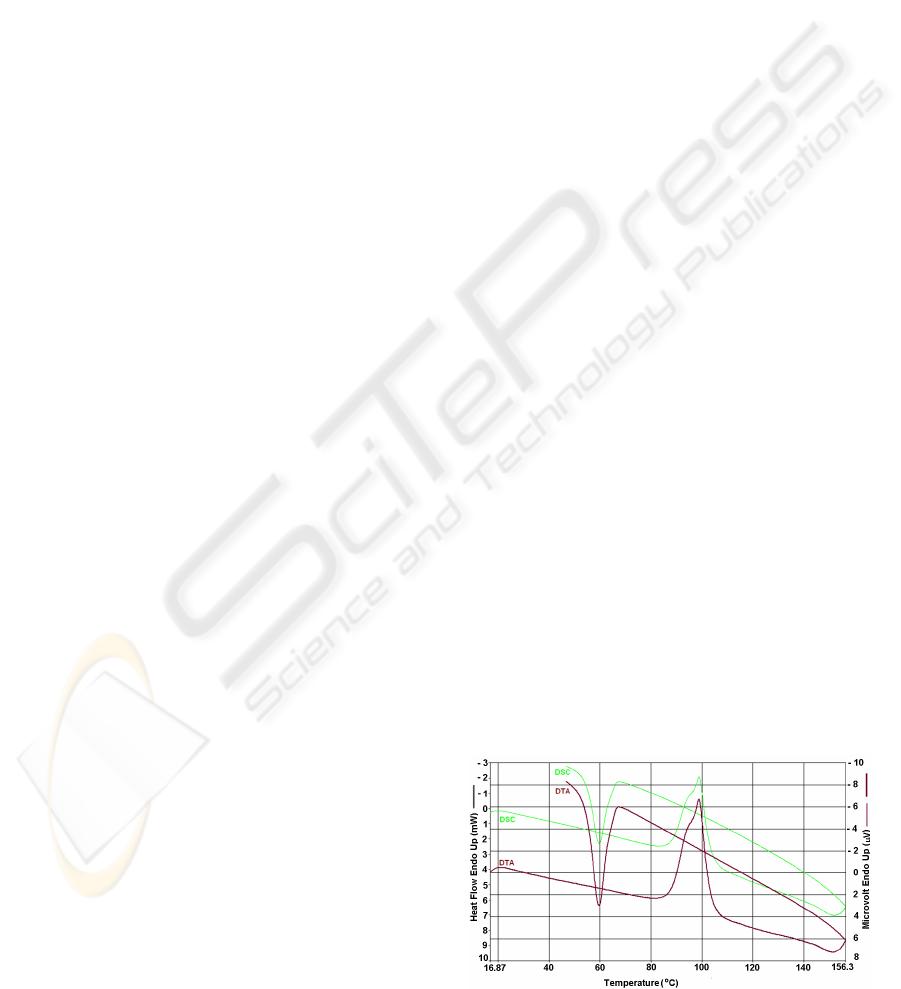
SMA strip transformation temperature
The temperature control program used for SMA
strip measurements contains the following sequences:
heating from 30°C to 160°C at 5°C/min;
holding for 10min at 160°C;
cooling from 160°C to 20°C at 5 °C/min.
The DTA and DSC curves are presented in Figure
1. By analyzing this figure we can observe two phase
transitions. The first occurs during the heating while
the second one appears during the cooling process.
The details of these thermal effects are presented in
figures 2 and 3 (reported from the DSC curve).
Figure 2 shows that the determined transformation
temperatures at heating are A
s
=80°C and A
f
=111°C.
The enthalpy of the endothermal transition process is
ΔH
h
=36.8858J/g. The temperature corresponding to
maximum transformation speed is 98.79°C.
The transformation temperatures at cooling result
from Figure 3: M
s
=69°C and M
f
=48.25°C. The
enthalpy of the exothermal transition process is
ΔH
c
=-28.7792J/g and the temperature corresponding
to maximum transformation speed is 59.75°C.
SMA helical spring transformation temperature
The transformation temperatures of SMA helical
spring are obtained by similar measurements as in
the case of SMA strip, using the following
temperature-control sequences:
heating from 30°C to 100°C at 5°C/min;
holding for 10 min at 100°C;
cooling from 100°C to 20°C at 5 °C/min.
The form of DTA and DSC curves is similar to
the ones represented in Figure 1, for 6.849mg SMA
spring sample. The experimental transformation
temperatures at heating are A
s
=58.89°C and
A
f
=67.93°C. The enthalpy of the endothermal
transition process is ΔH
h
=9.2J/g and the temperature
corresponding to maximum transformation speed is
60.42°C. The transformation temperatures at cooling
are M
s
=45°C and M
f
=33°C, the enthalpy of the
exothermal transition process is ΔH
c
= -5.03J/g and
the temperature corresponding to maximum
transformation speed is 39.07°C.
Figure 1: DTA and DSC curves for 18.275mg SMA strip.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
208
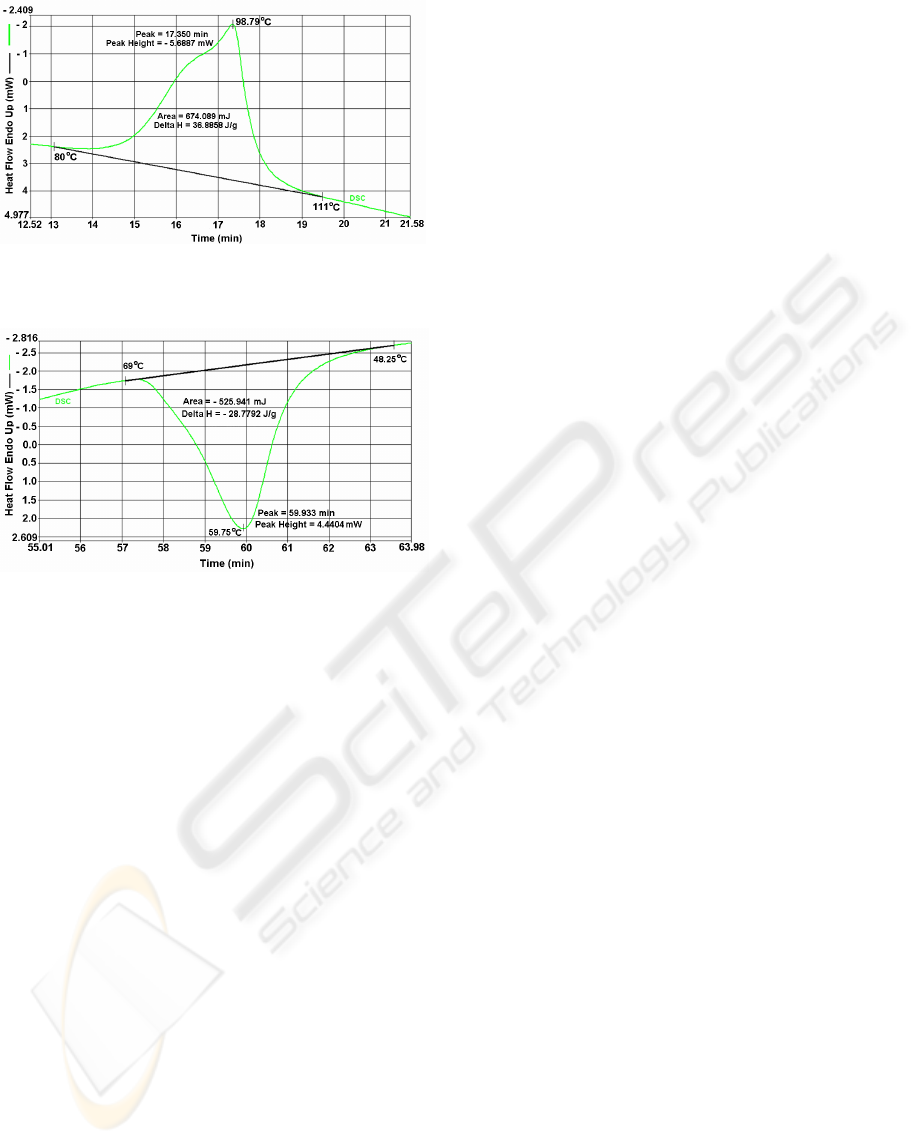
Figure 2: Detail of DSC curve for computation transition
at heating of SMA strip.
Figure 3: Detail of DSC curve for computation transition
at cooling of SMA strip.
4 VISUAL BASIC APPLICATIONS
Two Visual Basic applications were implemented
for SMA cantilever and SMA helical spring with
biasing spring. This section details these
applications.
Visual Basic application for SMA cantilever strip
Cantilevers made from SMA strip can be used to
provide a lifting force and a nominal amount of
motion by heating.
For the design example, assume that a cantilever
is required to lift a force F=2N (at electrically
energized) for a distance of 5mm (required motion)
and that the maximum allowable width is 3.8mm.
The high temperature stress is σ=140MPa. The
operational temperatures, at heating and cooling, are
those determined at section 3.2, that are 111°C and
respectively 48.25°C. For these temperatures the
experimental determined values of Young’s modulus
are E
h
=59000MPa and respectively E
l
=6900MPa.
A Visual Basic project SMA cantilever strip was
implemented. The application background computations
are entirely presented in (Degeratu, 2003).
After providing the initial parameters in the
dialogue boxes of the user interface (Figure 4), by
pressing the compute button the designed parameters
are being displayed in the upper part of the window:
cantilever length, thickness and width, reset force,
high and low temperature deflections. The middle of
the window displays the typical SMA cantilever
configuration as well as all design parameters.
SMA cantilever strip can be used to provide
thermal control of a microswitch or automatic control
of a cooling fan (Waram, 1993, Bizdoaca, 2006).
Visual Basic application for SMA spring with
biasing spring. In the work production operation
mode the SMA helical spring can work against
varying forces such as a steel spring, fluid presure or
a magnetic force. In this application the varying
force is produced by a steel spring.
For the design example, assume the following
requirements: a Ni-Ti-Cu spring/biasing spring
combination is required which provides a net force
F
n
=3N with a 8mm stroke; the maximum cavity length
and diameter are 38mm and respectively 5.5mm.
Assume that the force exerted by the biasing
spring F
h
=2N, the maximum corrected shear stress
T
c
=175MPa, the SMA spring index c=6 and the low
temperature shear strain γ
l
=0.015 (in order to ensure
a good cyclic life of 50000 cycles). The operational
temperatures, at heating and cooling, are those
determined at section 3.2, that are 67.93°C and
respectively 33°C. For these temperatures the
experimental determined values of shear modulus are
G
h
=16890MPa and respectively G
l
=3759MPa. Also
assume that the two springs are separated by a plug
of thickness 2.5mm.
A Visual Basic project SMA spring with biasing
spring was implemented. The application
background computations are entirely presented in
(Degeratu, 2003) and (Degeratu, 2007).
Using standard steel spring design procedure,
assume that the maximum shear stress for the wire
T = 675MPa and the shear modulus G = 79300MPa.
When the VISUAL BASIC project for SMA
spring with biasing spring design is run, a user
interface is displayed, Figure 5.
First the user has to provide the initial parameters
in the dialogue boxes in the lower part of the
interface. By clicking on the Compute button, the
designed parameters are being displayed for both
SMA spring and biasing spring in the upper part of
the interface. The total actuator system comprised of
SMA spring and biasing spring is shown in the
middle part of the interface.
This configuration is frequently used for SMA
Controlled Valves (Bizdoaca, 2006) and SMA
Latching Mechanisms and SMA Bell Crank
Mechanisms (Nesser, 2005, Waram, 1993).
VISUAL BASIC APPLICATIONS FOR SHAPE MEMORY ELEMENTS DESIGN USED IN INTELLIGENT SYSTEMS
209
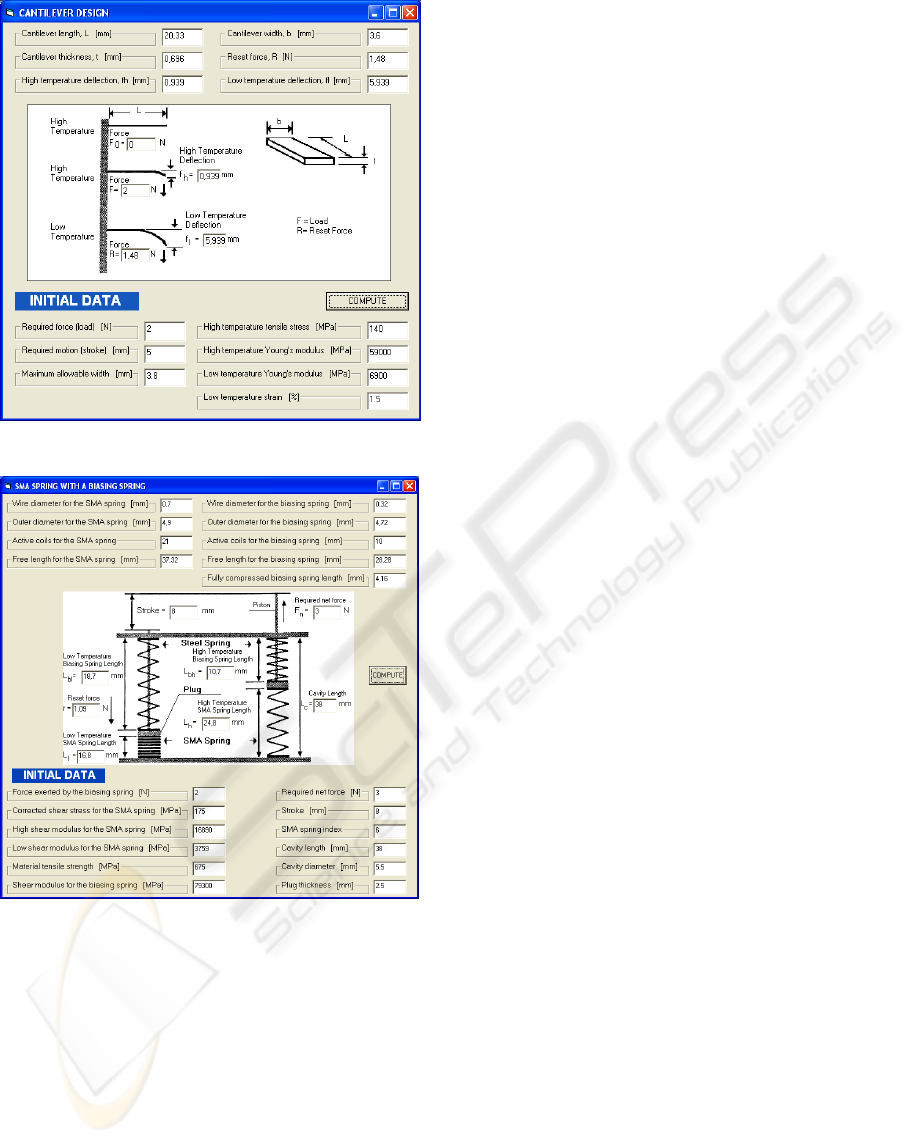
Figure 4: Dialog interface for SMA cantilever design.
Figure 5: Dialog interface for SMA spring with biasing
spring
5 CONCLUSIONS
The paper presents two design strategies for SMA
cantilever and SMA spring with biasing spring. For
these two design strategies the authors defined: the
operating mode, the mechanical considerations and
the design assumptions.
Using Thermal Analysis Methods the authors
determined the experimental transformation
temperatures for the studied SMA elements. These
temperatures were necessary to precisely establish
the shear modulus values for a high-quality design.
In addition, for each design strategy, a Visual Basic
application was developed, providing:
adequate dialogue boxes for fast and easy initial
parameters configuration;
fast computation and display of all required
information for a complete SMA element design;
remarkable facilities to analyze results and
choose an optimal solution.
These two Visual Basic applications are already
used by ICMET Craiova for engineering purposes
and by the Faculty of Electromechanical
Engineering of Craiova for didactical ones.
REFERENCES
Bizdoaca, N., G., Degeratu, S., Pana, C., Vasile, C., 2006.
Fuzzy Logic Controller for Hyperredundant SMA
Tendons Actuated Robot. 7
th
International Carpathian.
Control Conference. Ostrava Beskydy, Czech Republic.
Bizdoaca, N., G., Degeratu, S., Diaconu, I., Petrisor, A.,
Patrascu, D., 2006. Demining Robots: Behavior Based
Control Strategy. Annals of University of Craiova,
Craiova, Romania.
Degeratu, S., Bizdoaca, N., G., 2003. SMA’s.
Fundamental Notions, Design and Applications.
Universitaria Press, Craiova, Romania.
Degeratu, S., Manolea, H., O., Bizdoaca, N., G., 2007.
Shape Memory Elements Design for Intelligent
Systems, University Annuars from Oradea, Romania
Dolce, M., Cardone, D., 2001. Mechanical Behavior of Shape
Memory Alloys for Seismic Applications 2: Austenitic
NiTi Wires Subjected to Tension. Int. Met. Schi, 43.
Nasser, S., N., Choi, J., Y., Guo, W., Issacs, J., B., Taya,
M., 2005. High Strain-Rate, Small Strain Response of
NiTi Shape Memory Alloy. Journal of Engineering
Materials and Technology, vol.127.
Petrisor A., Rosca D., Bizdoaca N., G., Degeratu S., 2007,
Mathematical Model for Walking Robot with SMA
Ankle, ISI Proceedings ICINCO, Angers, France.
Van Humbeeck, J., 1999. Non-Medical Applications of
Shape Memory Alloys. Matter. Sci. Eng. 237A-275A
Van Humbeeck, J., 2001. Shape Memory Alloys: A
Material and a Technology. Adv. Eng. Mater., 3.
Waram, T., C., 1993. Actuator Design Using Shape
Memory Alloys. Ontario, Canada.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
210
