
SEQUENTIAL SYMBOL SYNCHRONIZERS BASED ON CLOCK
SAMPLING
Antonio D. Reis
1,2
, Jose F. Rocha
1
, Atilio S. Gameiro
1
and Jose P. Carvalho
2
1
Dep. de Electrónica e Telecomunicações / Instituto de Telecomunicações, Universidade de Aveiro, 3810 Aveiro, Portugal
2
Dep. de Fisica / U. D. Remota, Universidade da Beira Interior Covilhã, 6200 Covilhã, Portugal
Keywords: Synchronism, Telecommunications, Digital Communications.
Abstract: This work presents a sequential symbol synchronizer that was discovered by us, and is based on the clock
sampling by the input data transitions. This synchronizer has two types, namely the discrete and the
continuous. Each type has two versions which are the manual and the automatic. This synchronizer has an
own big advantage, because its manual version adjust hasn’t critical phase. The objective is to study the
synchronizers and to evaluate their output jitter UIRMS (Unit Interval Root Mean Square) versus input
SNR (Signal to Noise Ratio).
1 INTRODUCTION
This work studies the sequential symbol
synchronizer, based on clock sampling, by the input
data transitions.
The input data transitions sample the relative
phase of the clock negative transition (Imbeaux,
1983), (Rosenkranz, 1982), (Witte, 1983), (Hogge,
1985), (Simon and Lindsey, 1977).
If this transition clock is delayed then is applied
a positive pulse that advances it. However, if the
clock is advanced then is applied a negative pulse
that delays it (Carruthers, Falconer, Sandler and
Strawczynski, 1990), (Huber and Liu, 1992),
(D’Amico, D’Andrea and Regianni, 2001), (Dobkin,
Ginosar and Sotiriou, 2004), (Noels, Steendam and
Moeneclaey, 2006).
The clock positive transition samples the data at
the symbols center (maximum opening eye
diagram). We present two types/ variants of
synchronizers each one with two versions.
Fig.1 shows the functioning principle of the
referred synchronizers.
Figure 1: Aspect of the synchronizer based on clock
sampling.
Kf is the phase comparator gain, F(s) is the loop
filter, Ko is the VCO gain and Ka is the loop
amplification that controls the root locus and the
loop desired characteristics.
Following, we present the discrete synchronizer
with its versions manual and automatic.
Next, we present the continuous synchronizer
with its versions manual and automatic.
After, we present the design and tests.
Then, we present the results.
Finally, we present the conclusions.
2 DISCRETE SYNCHRONIZER
TYPES
The discrete type has a pulse error Pe that goes
discreetly to the equilibrium point, without to
disappear. This discrete type has the following
versions manual and automatic (Reis, Rocha,
Gameiro and Pacheco, 2008).
2.1 Discrete Type and Manual Version
The manual version is based on a delay line that
needs a previous human adjustment. This delay
determines the charge pulse area (Fig.2).
110
D. Reis A., F. Rocha J., S. Gameiro A. and P. Carvalho J. (2009).
SEQUENTIAL SYMBOL SYNCHRONIZERS BASED ON CLOCK SAMPLING.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 110-114
DOI: 10.5220/0002236801100114
Copyright
c
SciTePress
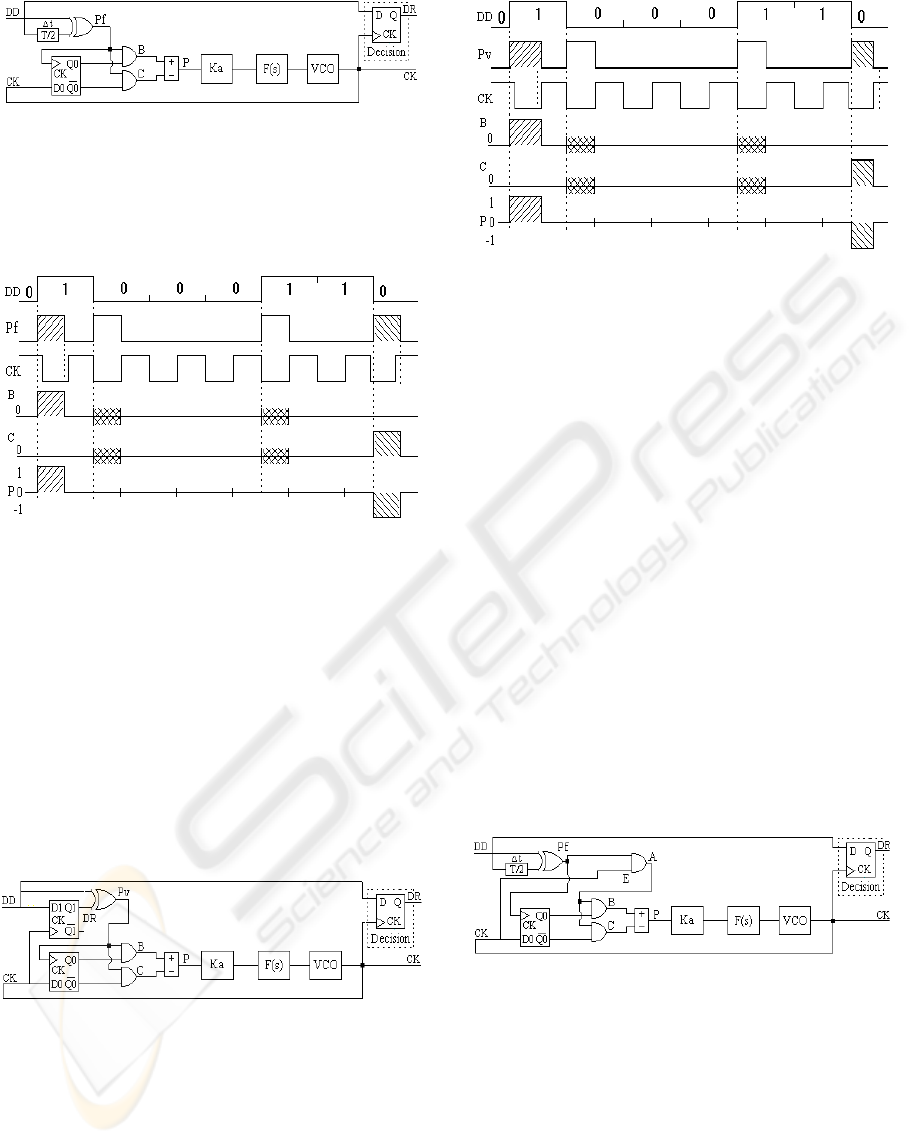
Figure 2: Synchronizer discrete and manual (d-m).
The exor with delay T/2 produces a fixed pulse
Pf that determines the charge rhythm .
Fig.3 shows the waveforms of the synchronizer
discrete and manual.
Figure 3: Waveforms of the synchronizer discrete and
manual.
The error pulse Pe maintains its area in
synchronization and remains constant at the
equilibrium point (Reis, Rocha, Gameiro and
Pacheco, 2008).
2.2 Discrete Type and Automatic
Version
The automatic version is based on a flip flop that
automatically provides the delay. This delay
determines the charge pulse area (Fig.4).
Figure 4: Synchronizer discrete and automatic (d-a).
The flip flop 1 with produces a variable pulse Pv
that determines the charge rhythm.
Fig.5 shows the waveforms of the synchronizer
discrete and automatic.
Figure 5: Waveforms of the synchronizer discrete and
automatic.
The error pulse Pe varies its area in
synchronization, but remains more or less constant
at the equilibrium point.
3 CONTINUOUS
SYNCHRONIZER TYPES
The continuous type has a pulse error that goes
continuously to the equilibrium point and disappear.
This continuous type has the following versions
manual and automatic (Reis, Rocha, Gameiro and
Pacheco, 2008).
3.1 Continuous Type and Manual
Version
The manual version is based on a delay line that
needs a previous human adjustment. This delay
determines the charge pulse area (Fig.6).
Figure 6: Synchronizer continuous and manual (c-m).
The exors with delay T/2 and AND A produces a
variable pulse A that determines the charge rhythm.
Fig.7 shows the waveforms of the synchronizer
continuous and manual.
SEQUENTIAL SYMBOL SYNCHRONIZERS BASED ON CLOCK SAMPLING
111
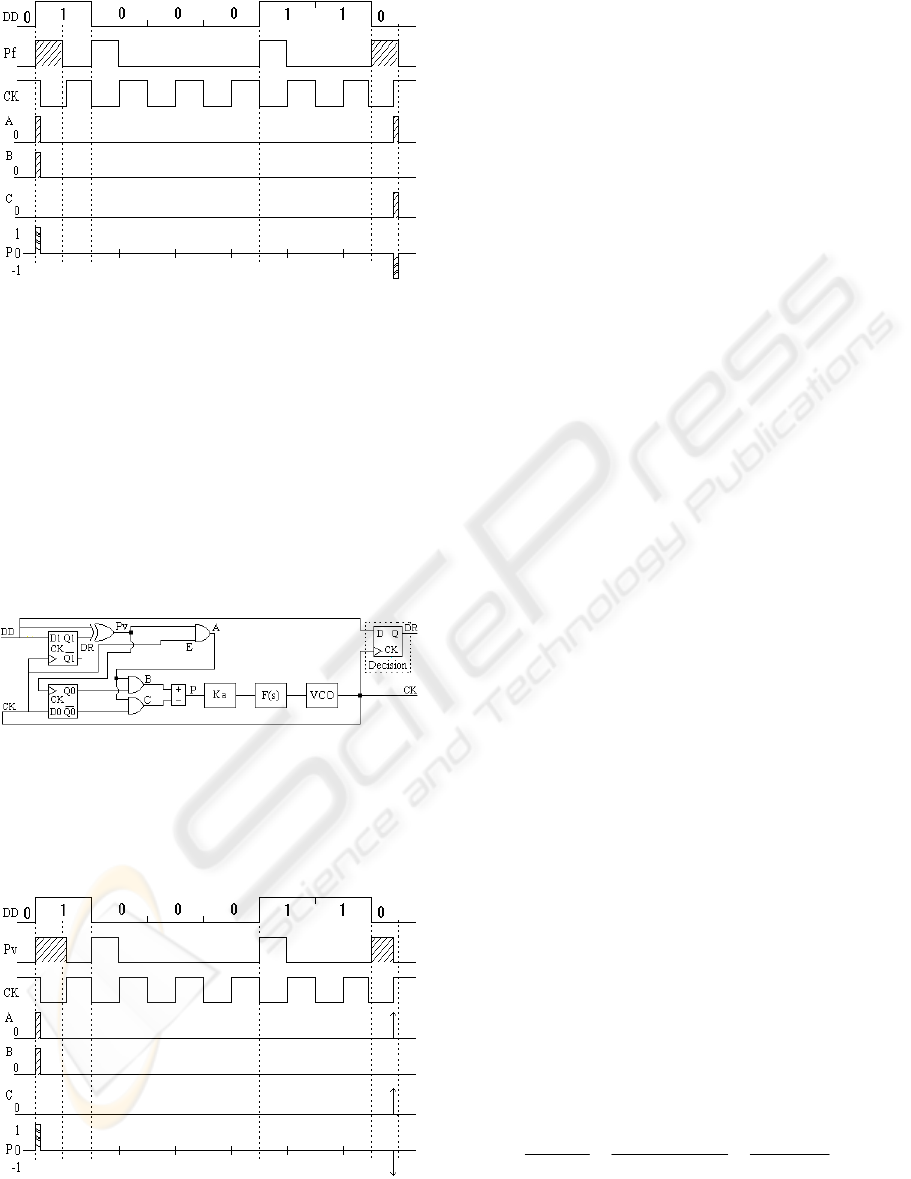
Figure 7: Waveforms of the synchronizer continuous and
manual.
The error pulse Pe diminishes its area in
synchronization and disappear at the equilibrium
point.
3.2 Continuous Type and Automatic
Version
The automatic version is based on a flip flop that
automatically provides the delay. This delay
determines the charge pulse area (Fig.8).
Figura 8: Synchronizer continuous and automatic (c-a).
The exors with delay T/2 and AND A produces a
variable pulse A that determines the charge rhythm.
Fig.9 shows the waveforms of the synchronizer
continuous and automatic.
Figure 9: Waveforms of the synchronizer continuous and
automatic.
The error pulse Pe diminishes its area in
synchronization and disappear at the equilibrium
point.
4 DESIGN, TESTS AND RESULTS
We will present the design, tests and results of the
referred synchronizers (Reis, Rocha, Gameiro and
Pacheco, 2001).
4.1 Design
To get guaranteed results, it is necessary to
dimension all the synchronizers with equal
conditions. Then it is necessary to design all the
loops with identical linearized transfer functions.
The general loop gain is Kl=Kd.Ko=Ka.Kf.Ko
where Kf is the phase comparator gain, Ko is the
VCO gain and Ka is the control amplification factor
that permits the desired characteristics.
For analysis facilities, we use a normalized
transmission rate tx=1baud, what implies also
normalized values for the others dependent
parameters. So, the normalized clock frequency is
fCK=1Hz.
We choose a normalized external noise
bandwidth Bn = 5Hz and a normalized loop noise
bandwidth Bl = 0.02Hz. Later, we can disnormalize
these values to the appropriated transmission rate tx.
Now, we will apply a signal with noise ratio
SNR given by the signal amplitude Aef, noise
spectral density No and external noise bandwidth
Bn, so the SNR = A
2
ef
/(No.Bn). But, No can be
related with the noise variance σn and inverse
sampling Δτ=1/Samp, then No=2σn
2
.Δτ, so
SNR=A
2
ef
/(2σn
2
.Δτ.Bn) = 0.5
2
/(2σn
2
*10
-3
*5)=
25/σn
2
.
After, we observe the output jitter UI as function
of the input signal with noise SNR. The dimension
of the loops is:
- 1
st
order loop:
The loop filter F(s)=1 with cutoff frequency
0.5Hz (Bp=0.5 Hz is 25 times bigger than
Bl=0.02Hz) eliminates only the high frequency, but
maintain the loop characteristics.
The transfer function is
H(s)=
KdKos
KdKo
sKdKoFs
sKdKoF
+
=
+
=
+ )(
)(
G(s)1
G(s)
(1)
the loop noise bandwidth is
WINSYS 2009 - International Conference on Wireless Information Networks and Systems
112
Bl =
44
KfKo
Ka
KdKo
=
= 0.02Hz (2)
Then, for the analog synchronizers, the loop
bandwidth is
Bl=0.02=
(Ka.Kf.Ko)/4 with (Km=1, A=1/2, B=1/2;
Ko=2π)
(Ka.Km.A.B.Ko)/4 = 0.02 -> Ka=0.08*2/
π
(3)
For the hybrid synchronizers, the loop bandwidth is
Bl=0.02=
(Ka.Kf.Ko)/4 with (Km=1, A=1/2, B=0.45;
Ko=2π)
(Ka.Km.A.B.Ko)/4 = 0.02 -> Ka=0.08*2.2/
π
(4)
For the combinational synchronizers, the loop
bandwidth is
Bl=0.02=(Ka.Kf.Ko)/4 with (Kf=1/π; Ko=2π)
(Ka*1/
π
*2
π
)/4 = 0.02 -> Ka=0.04 (5)
For the sequential synchronizers, the loop
bandwidth is
Bl=0.02=(Ka.Kf.Ko)/4 with (Kf=1/2π; Ko=2π)
(Ka*1/2
π
*2
π
)/4 =0.02 -> Ka=0.08 (6)
The jitter depends on the RMS signal Aef, on the
power spectral density No and on the loop noise
bandwidth Bl.
For analog PLL the jitter is:
σφ
2
=Bl.No/Aef
2
=Bl.2.σn
2
.Δτ=0.02*10
-
3
*2σn
2
/0.5
2
=16*10
-5
.σn
2
For the others PLLs the jitter formula is more
complicated.
- 2
nd
order loop:
The second order loop is not shown here, but the
results are identical to the ones obtained above for
the first order loop.
4.2 Tests
The following figure (Fig.10) shows the setup that
was used to test the various synchronizers.
Figure 10: Block diagram of the test setup.
The receiver recovered clock with jitter is
compared with the emitter original clock without
jitter, the difference is the jitter of the received
clock.
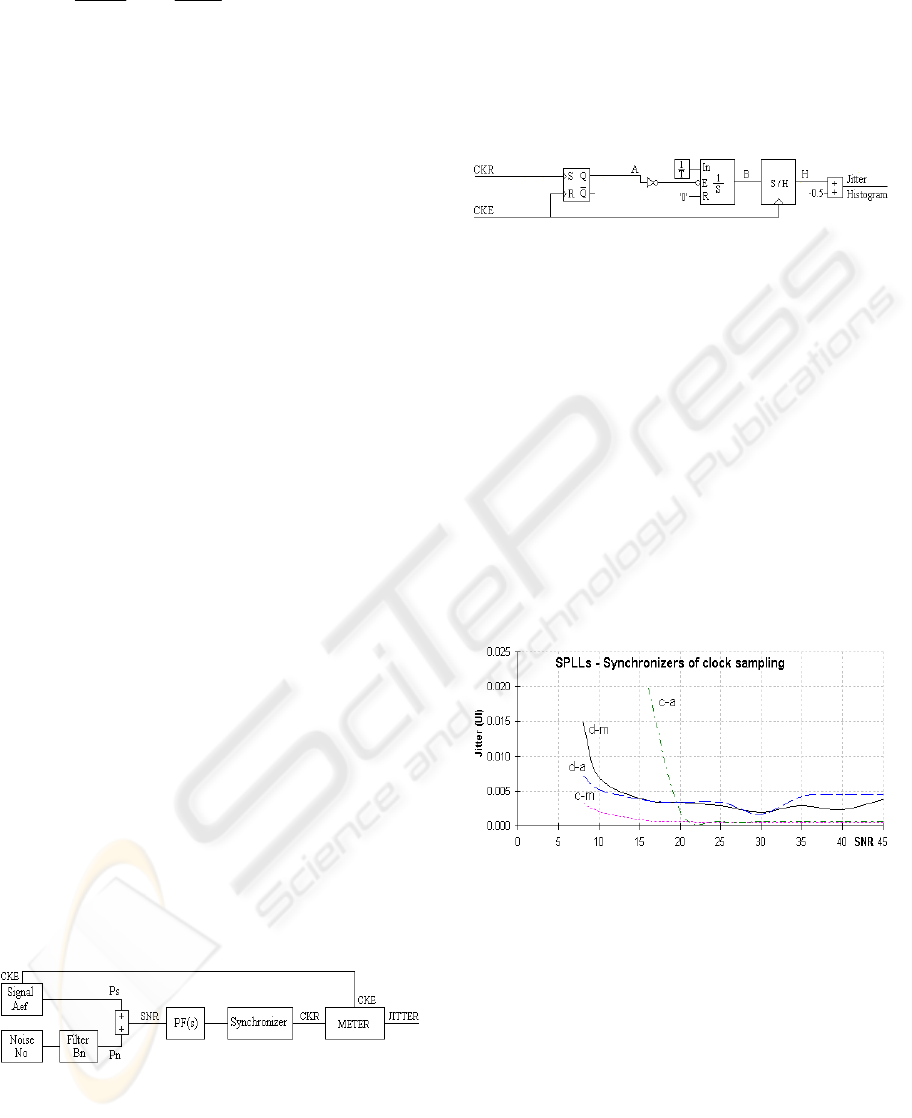
4.3 Jitter Measurer (Meter)
The jitter measurer (Meter) consists of a RS flip
flop, which detects the random variable phase of the
recovered clock (CKR), relatively to the fixed phase
of the emitter clock (CKE). This relative random
phase variation is the recovered clock jitter (Fig.11).
Figure 11: The jitter measurer (Meter).
The other blocks convert this random phase
variation into a random amplitude variation, which
is the jitter histogram.
Then, the jitter histogram is sampled and
processed by an appropriate program, providing the
RMS jitter and the peak to peak jitter.
4.4 Results
We will present the results (output jitter UIRMS
versus input SNR) for the four synchronizers.
Fig.12 shows the jitter-SNR curves of the four
synchronizers: discrete and manual (d-m), discrete
and automatic (d-a), continuous and manual (c-m)
and continuous and automatic (c-a).
Figure 12: Jitter-SNR curves of the four synchronizers(d-
m,d-a,c-m,c-a).
We verify, that generally the output jitter
UIRMS diminishes gradually with the input SNR
increasing.
For high SNR, the four curves tend to be equals,
but with some disadvantage of the discrete
automatic (d-a). However, for low SNR the
continuous manual (c-m) is the best, followed of the
discrete manual (d-m). After is the discrete
automatic (d-a) and at last the continuous automatic
(c-a).
SEQUENTIAL SYMBOL SYNCHRONIZERS BASED ON CLOCK SAMPLING
113

5 CONCLUSIONS
We studied four synchronizers, namely the discrete
manual (d-m), the discrete automatic (d-a), the
continuous manual (c-m) and the continuous
automatic (c-a). Then, we tested their output jitter
UIRMS versus input SNR.
We observed that, generally, the jitter UIRMS
diminishes gradually with the SNR increasing.
We verified, that for high SNR, the jitter of the
four synchronizers is similar, but with a slight
disadvantage of the discrete automatic (d-a). This is
comprehensible since the error pulse Pe is variable
and don’t disappear at the equilibrium point.
However, for low SNR, the continuous manual
(c-m) is the best, this is comprehensible since the
error pulse Pe diminishes gradually and disappear at
the equilibrium point, also the additional AND is a
closed door to the noise. The discrete automatic (d-
a) and the discrete automatic (d-a) have an
intermedium performance since their error pulse u
don’t disappear at the equilibrium point. The
continuous automatic (c-a) has the worst jitter, since
its error pulse Pe has non symmetric positive and
negative pulse contributions that aggravates the
jitter.
ACKNOWLEDGEMENTS
The authors are grateful to the program FCT
(Foundation for sCience and Technology) /
POCI2010.
REFERENCES
Imbeaux, J. C., 1983. Performance of the delay-line
multiplier circuit for clock and carrier
synchronization. IEEE Journal on Selected Areas in
Communications p.82 Jan.
Rosenkranz, W., 1982. Phase Locked Loops with limiter
phase detectors in the presence of noise. IEEE Trans.
on Communications com-30 Nº10 pp.2297-2304. Oct.
Witte, H. H., 1983. A Simple Clock Extraction Circuit
Using a Self Sustaining Monostable Multivibrator
Output Signal. Electronics Letters, Vol.19, Is.21,
pp.897-898, Oct.
Hogge, C. R., 1985. A Self Correcting Clock Recovery
Circuit. IEEE Tran. Electron Devices p.2704 Dec.
Reis, A. D., Rocha, J. F., Gameiro, A. S., Carvalho, J. P.,
2001. A New Technique to Measure the Jitter. Proc.
III Conf. on Telecommunications pp.64-67 FFoz-PT
23-24 Apr.
Simon, M. K., Lindsey, W. C., 1977. Tracking
Performance of Symbol Synchronizers for Manchester
Coded Data. IEEE Transactions on Communications
Vol. com-2.5 Nº4, pp.393-408, April.
Carruthers, J., Falconer, D., Sandler, H., Strawczynski, L.,
1990. Bit Synchronization in the Presence of Co-
Channel Interference. Proc. Conf. on Electrical and
Computer Engineering pp.4.1.1-4.1.7, Ottawa-CA 3-6
Sep.
Huber, J., Liu, W., 1992. Data-Aided Synchronization of
Coherent CPM-Receivers. IEEE Transactions on
Communications Vol.40 Nº1, pp.178-189, Jan.
D’Amico, A., D’Andrea, A., Reggianni, 2001. Efficient
Non-Data-Aided Carrier and Clock Recovery for
Satellite DVB at Very Low SNR. IEEE Jou. on
Sattelite Areas in Comm. Vol.19 Nº12 pp.2320-2330,
Dec.
Dobkin, R., Ginosar, R., Sotiriou, C. P., 2004. Data
Synchronization Issues in GALS SoCs. Proc. 10th
International Symposium on Asynchronous Circuits
and Systems, pp.CD-Ed., Crete-Greece 19-23 Apr.
Noels, N., Steendam, H., Moeneclaey, M., 2006.
Effectiveness Study of Code-Aided and Non-Code-
Aided ML-Based Feedback Phase Synchronizers.
Proc. IEEE Int Conf. on Comm.(ICC’06) pp.2946-
2951, Ist.-TK, 11-15 Jun.
Reis, A. D., Rocha, J. F., Gameiro, A. S., Carvalho, J. P.,
2008. The Electromagnetic Wave and the Principle of
the Telecommunications. Proc. VI Sym. on Enabling
Optical Network and Sen. (SEONs 2008) p.87-88, Av-
PT 29-29 Jun.
WINSYS 2009 - International Conference on Wireless Information Networks and Systems
114
