
A METHOD FOR SEGMENTING AND RECOGNIZING A
VEHICLE LICENCE PLATE FROM A ROAD IMAGE
Abdelhalim Boutarfa, Mahfoud Hamada
Advanced Electronics Laboratory (LEA), Chahid Boukhlouf Road, University of Batna, 05000, Algeria
Emptoz Hubert
RFV Laboratory, LIRIS, 20 avenue Albert Einstein, 69621 Villeurbanne Cedex, France
Keywords: Intelligent Transportation Systems, License plate, Feature extraction, Segmentation, Pattern Recognition.
Abstract: To solve the problems of heavy traffic, due to the increase in the number of vehicles, modern cities need to
establish effectively automatic systems for traffic monitoring and management. One of the most useful
systems is the License-Plate Recognition System which captures images of vehicles and reads the plate’s
registration numbers automatically. Our method in this paper presents a robust algorithm for segmenting
and recognizing a vehicle license plate area from a road image. As preprocessing steps, we statistically
analyze the features of some sample plate images, and compute thresholds for each feature to decide
whether a pixel is inside a plate or we cannot decide it. Our methodology starts from constructing the binary
version of a road image according to the thresholds. Then, we select at most three strong candidate areas by
searching the binary image with a moving window. The plate area is selected among the candidates with
simple heuristics. Our algorithm is stable and robust against the cases of plate transformation and/or
decolorization. The experimental results show 98.05% of successful plate recognition for 256 input images.
1 INTRODUCTION
Automatic vehicle identification is an essential stage
in intelligent traffic systems. Nowadays vehicles play
a very big role in transportation. Also the use of
vehicles has been increasing because of population
growth and human needs in recent years. Therefore,
control of vehicles is becoming a big problem and
much more difficult to solve. License plate
recognition is a form of automatic vehicle
identification. It is an image processing technology
used to identify vehicles by only their license plates.
LPR has many applications like highway electronic
toll collection, red light violation enforcement
(Bailey, 2002) border and customs checkpoints and
speed limit enforcement. Since every vehicle carries a
unique license plate, no external cards, tags or
transmitters need to be recognizable, only license
plate.
2 PREVIOUS WORK
The vehicle recognition from road images is one of
the basic operations for traffic monitoring, detecting
illegal vehicles, and automatic fee collection
systems in parking lots or highways.
Especially for ITS (Intelligent Transportation
System), vehicle recognition is one of the most
important problems which should be solved. One of
the problems directly related to the vehicle
recognition is recognizing license plates (Naito,
2000), (Rahman, 2003).
Generally, vehicle license plate recognition
problem consists of two parts:
1. Detecting and segmenting the plate area.
2. Recognizing the characters inside the plate.
(Chang & al, 2004) proposed a robust license
plate detection algorithm using color edge and
fuzzy disciplines. However, their algorithm can
only detect the license plates with specific colors. In
(Matas & al, 2005) the authors proposed an
algorithm to detect license plate and road sign. They
413
Boutarfa A., Hamada M. and Hubert E. (2010).
A METHOD FOR SEGMENTING AND RECOGNIZING A VEHICLE LICENCE PLATE FROM A ROAD IMAGE.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 413-419
DOI: 10.5220/0002840004130419
Copyright
c
SciTePress

used character regions as basic units of license plate,
which makes the algorithm hardly distinguish
interference characters from the true license plates.
There have been many attempts for the plate area
segmentation based on various techniques including a
binary image processing (Takatoo, 1987), neural
networks and Markov random field (Chui, 1997), the
mathematical morphology (Hsieh, 2002), the color
and edge data from the plate and inner characters
(Xu, 2004) and so on.
Gao and Yang applied image processing
techniques for the plate area to have high feature
values, to finally detect candidate areas for the plate.
(Gao, 2000) use the observation that there is a big
difference between the contrast of the plate
background and inner characters. They also use the
observation that the average gradient value of the
plate area is high, but the variance is low.
(Yang, 2005) computes histograms of the vertical
and horizontal gradients and then applies
mathematical morphology to select candidate areas
for the plate.
In this paper, we present an algorithm to detect
and segment for recognition the plate areas from road
images. The input images are still images with
1280×960 resolutions that are captured from the CCD
camera which is installed on a support pole above a
road. In a preprocessing step, we analyze the features
of the sample plate images. Then, we compute
thresholds to distinguish a plate area from remaining
areas. Those thresholds are used to binaries the input
image later.
Given an input image, our algorithm applies
image processing techniques, such as the
transformation of its color model and applying Sobel
edge operator. Then, we binarize input images to
emphasize the plate area. In the next stage, we use a
fixed-size window to search the plate area over the
whole binary image. Through moving the window
over the binary image, we can find at most three non-
overlapping plate candidate areas according to the
accumulation of pixel values inside the window. We
finally choose the final plate area from the candidates
based on simple heuristics. The advantages of our
method can be summarized as follows:
1. The algorithm robustly detects and segments the
plate area even for the cases when the plate in the
image is inclined or transformed.
2. The algorithm is not affected by the changes of
illumination, camera exposure, or the
decolorization of plates.
3. In spite of relatively simple preprocessings with a
small number of sample images, experimental
results show high success rates.
In this paper, we restricted the input and sample
images as those captured in the People’s Republic
of China. However, our algorithm is not limited to
be applied only for Chinese license plates (see
figure 7). The license plates from other countries
also have similar features such that the usage of
numbers and characters and some specific pair of
colors for the plate. By varying the parametric
values and the thresholds, we can more generalize
our plate segmentation algorithm. This paper is
organized as follows:
In Section 3, we analyze the feature of license
plates, and construct a preprocessing stage based on
the statistical analysis. In the next Section, we
present an algorithm for segmenting and
recognizing a license plate and its validation. The
experimental results are shown in Section 5. We
conclude this paper in Section 6.
3 FEATURES EXTRACTION
To isolate the license plate area from road images,
we need distinctive features to distinguish it from
other areas. This paper uses road images captured in
the People’s Republic of China to demonstrate our
method of isolating license plate areas. Thus, we
focus on the Chinese license plate and consider the
following three aspects:
1. Edge features due to the characters used in the
license plate.
2. Chromatic features due to the colors used in the
license plate.
3. Geometric features due to the shape of the
license plate.
Our license plate area extraction algorithm is
derived from these distinctive features. Analyses
and pre-processing steps for them are followed.
3.1 Edge Features from the Characters
License plates used in the People’s Republic of
China generally consist of a single Chinese
character, a single alphabet and five alphanumeric
characters in a row. Due to their geometric shapes,
alphanumeric characters contain relatively large
quantities of vertical edges. Thus, we can expect
that the license plate area will have more vertical
edges compared to other areas.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
414
(a)
(b)
(c)
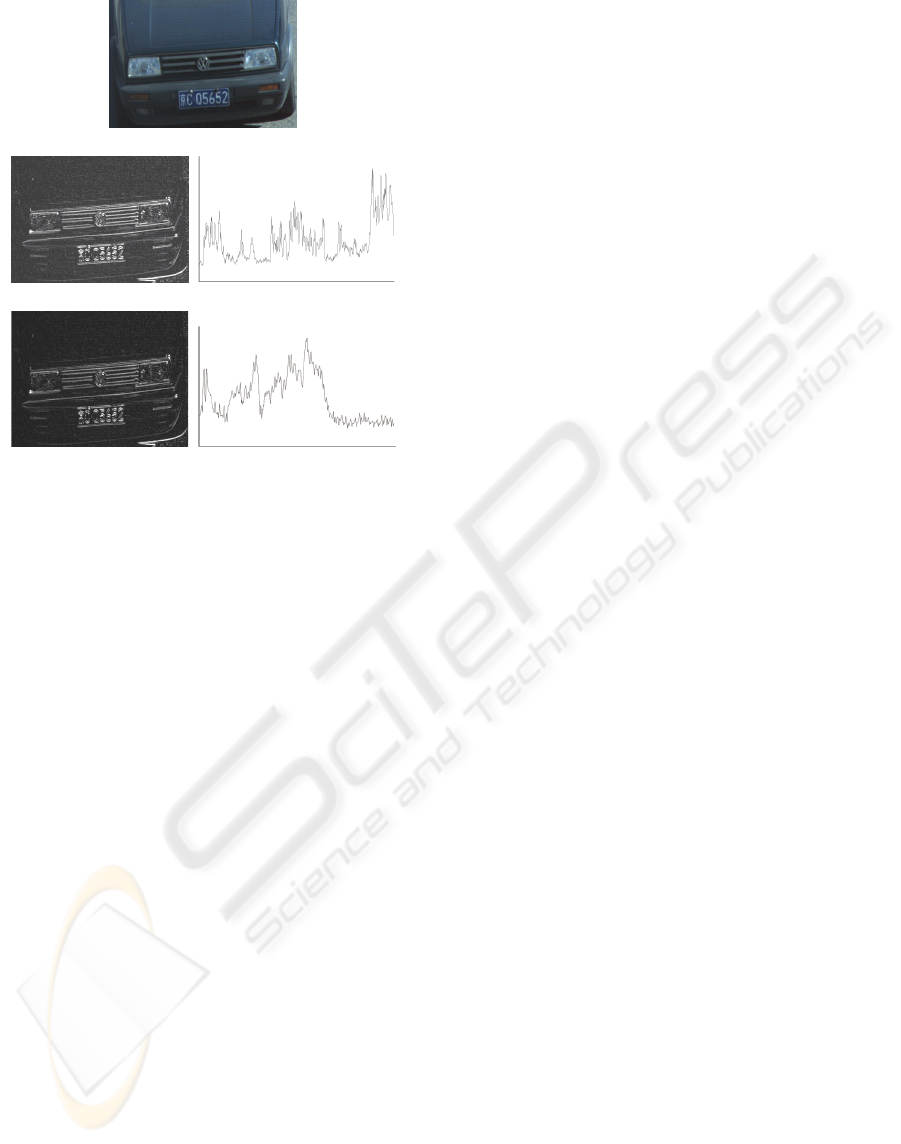
(a) original road image
(b) horizontal edges and their histogram
(c) vertical edges and their histogram
Figure 1: Characteristics of the Sobel‘s edge detection
operator applied to the front side of vehicle.
Figure 1 shows the result of horizontal and vertical
edge extraction through applying Sobel edge
operators to the grayscale image containing a license
plate. Figure (1a) is the original road image. Figures
(1b) and (1c) are horizontal and vertical edge
extraction results and their corresponding histograms,
respectively.
As shown in figure (1b), the lower body of a
vehicle contains many horizontal edges in several
areas and we met difficulties in using horizontal
edges to find the license area. In contrast, as shown in
figure (1c), the license plate area contains more
vertical edges in comparison with other areas. Due to
the side areas or some models of radiator grills of the
vehicle, the vertical edge feature alone cannot
identify the license plate area.
To calculate the characteristics of vertical edges in
the license plate area, we use a set of sample images.
Letting n be the number of sample images, we extract
minimal rectangular area R
i
, 1≤i≤n containing the
license plate area, for each sample image (Fig. 2a).
When p
xy
is the pixel at (x,y) in the input image,
the rectangular area R
i,
can be defined as a set of
pixels as follows:
{
}
)()( and )()(|
maxminmaxmin iiiixyi
RyyRyRxxRxpR ≤≤≤≤=
w
here x
min
(R
i
), x
max
(R
i
), y
min
(R
i
), and y
min
(R
i
) are the
minimum and the maximum values of x and y
coordinates for R
i,
respectively.
We first convert each pixel P
xy
in R
i
to grayscale
values. Then apply Sobel edge operator to calculate
the vertical edge value Edge
vertical
(p
xy
) (Fig. 2b).
After calculating Edge
vertical
(p
xy
) values, we
accumulate them along the vertical direction, to
construct histograms as shown in Figures (b). In the
histogram, the more vertical edge portions due to
the characters in the license plate are isolated from
the less vertical edge portions corresponding to the
blank areas, and we can easily distinguish the
characteristics of the vertical edges.
In this paper, we use 25 sample images to extract
minimal rectangular area R
i
,s and construct
corresponding histograms. After analyzing the
vertical edge portions and inverse mapping the
result to Edge
vertical
(p
xy
) values, the Edge
vertical
(p
xy
)
values show a distribution with the mean of
µ
edge
=52.196 and the standard deviation of
σ
edge
=24.342.
As shown in the example histogram of figure
(1b), the character portions and the blank portions
show large variations. From the statistics point of
view, we use only uppermost 10% of edge detection
values for the final decision step of the algorithm
that will be presented in section 4.
After calculating Edge
vertical
(p
xy
),s the pixels
with values larger than µ
edge
+1.33 σ
edge
are
considered as the candidates for the license plate
area pixels. This corresponds to the uppermost
10.02% of vertical edge values, when interpreted as
a normal distribution.
3.2 Chromatic Features
Since the license plate has a unique background
color and another distinctive character color, we can
use this chromatic feature to find the license plate
area. Original input images use the RGB color
model, which do not distinguish color and intensity
information. Thus, to normalize the intensity and
camera exposures at the capture time, we convert
the RGB color values into the HSV (hue-saturation-
value) color values. In the HSV model, intensity
information is isolated in the V(value) channel and
we can get the intensity-normalized result using
only the H(hue) and/or S(saturation) channels
(Shyang-Lih, 2004).
To extract chromatic features, we select the
most widely used license plate type, which is
usually used for general passenger cars and small
cargo trucks in China, whose background color is
A METHOD FOR SEGMENTING AND RECOGNIZING A VEHICLE LICENCE PLATE FROM A ROAD IMAGE
415
dark blue and characters are painted in white color
(see figure 2).
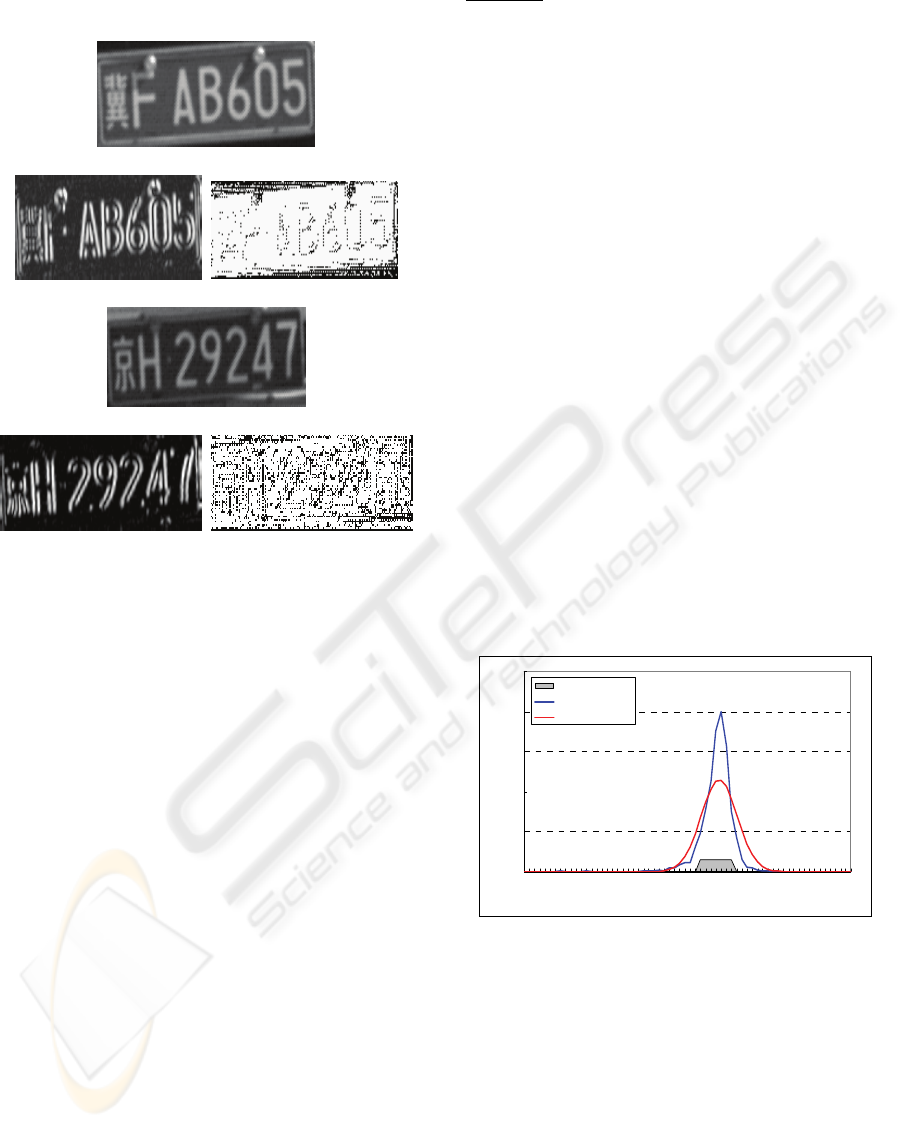
(a)
(b) (c)
(a)
(b) (c)
(a) rectangular region R
i
from original images
(b) extraction of vertical edges
(c) binary image due to the hue value processing
Figure 2: Image processing results.
Our experimental results show that the
S(saturation) channel does not show distinctive
characteristics, while the distribution in the H(hue)
channel does. To analyze the distribution of hue
values, we use a set of sample images. In this paper,
we use 25 sample plate images S
i
, 1≤i≤25, which are
extracted from 25 road images and aligned along the
x and y axis. Each sample image can be considered as
a set of pixels as follows:
{
}
)()( and )()(|
maxminmaxmin iiiixyi
SyySySxxSxpS ≤≤≤≤=
w
here x
min
(S
i
), x
max
(S
i
), y
min
(S
i
), and y
min
(S
i
) are the
minimum and maximum of x and y coordinates of the
rectangular area covered by S
i
, whose size varies for
each sample image.
For more simple and efficient processing, the hue
value hue(p
xy
) for a pixel p
xy
is normalized into
integer values between 0 and 255.
To get distributions of hue values for S
i
,s we use
the following algorithm:
Algorithm 1
const int numImages = 25
array hueCount[i][h] : for the i-th
image, contain no. of pixels with hue
value h
for i =1 to numImages do
for each pixel p
xy
Є S
i
do
h
←
hue(p
xy
) // normalized hue value: 0
to 255
hueCount[i][h] = hueCount[i][h] + 1
end
end
for each possible hue value h do
averageHue[h] = average of
hueCount[i][h]
end
Figure 3 shows the final distribution of hue
values. From this discrete distribution, we get the
mean of µ
hue
=149.992 and the standard deviation of
σ
hue
=13.794. A normal distribution corresponding
to these values in figure 3 are drawn in red color.
In our paper, we select the confidence interval of
(µ
hue
- σ
hue
, µ
hue
+ σ
hue
) corresponding to 72.36% of
confidence. Thus, in our experiments, the pixels
between H
min
= µ
hue
- σ
hu
=136.198 and
H
max
= µ
hue
+ σ
hu
=163.786
(marked as gray area in figure 3) are considered as
the license plate area pixels. When assigning 1,s to
the pixels with µ
hue
- σ
hue
≤
hue(p
xy
)
≤
µ
hue
+ σ
hue
and
0,s to others, we can get a binary image reflecting
this chromatic feature, as shown in figure 2(c).
0.00
0.05
0.10
0.15
0.20
0.25
0
12
24
36
48
60
72
84
96
108
120
132
144
156
168
180
192
204
216
228
240
252
hue values (0 to 255)
distribution
confidence interval
calculated hue values
normal distribution
Figure 3: Distribution of hue values for the sample license
plates.
3.3 Geometric Features
In China and other countries, the size of a license
plate is specified in a law. Thus, we can calculate
the expected size of the license plate in a road
image, from the plate size and camera
configurations. In this paper, we use 25 images to
get the expected size of w
xh pixels.
We use the value of w=185 and h=75 which
contains some extra pixels for efficient
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
416
implementation of our algorithm shown in the section
4. Our experiments with 256 road images show that
this plate size can sufficiently contain the plate area
for all finally successful segmentations.
4 SEGMENTATION ALGORITHM
In this section, we present a license plate area
segmentation algorithm, based on the features
explained in the previous sections. For each pixel p
xy
,
we choose the threshold value of µ
edge
+ 1.33σ
edge
to
find uppermost 10.02% of Sobel vertical edge
detection results, as explained in section 3.1. To
reflect chromatic characteristics of the license plate
area, an interval of hue values (µ
hue
- σ
hue
, µ
hue
+ σ
hue
)
will be used as the threshold values. Additionally,
from the size of the license plate and camera
configurations, we calculated the expected window
size w
xh for searching the plate area in an input
image.
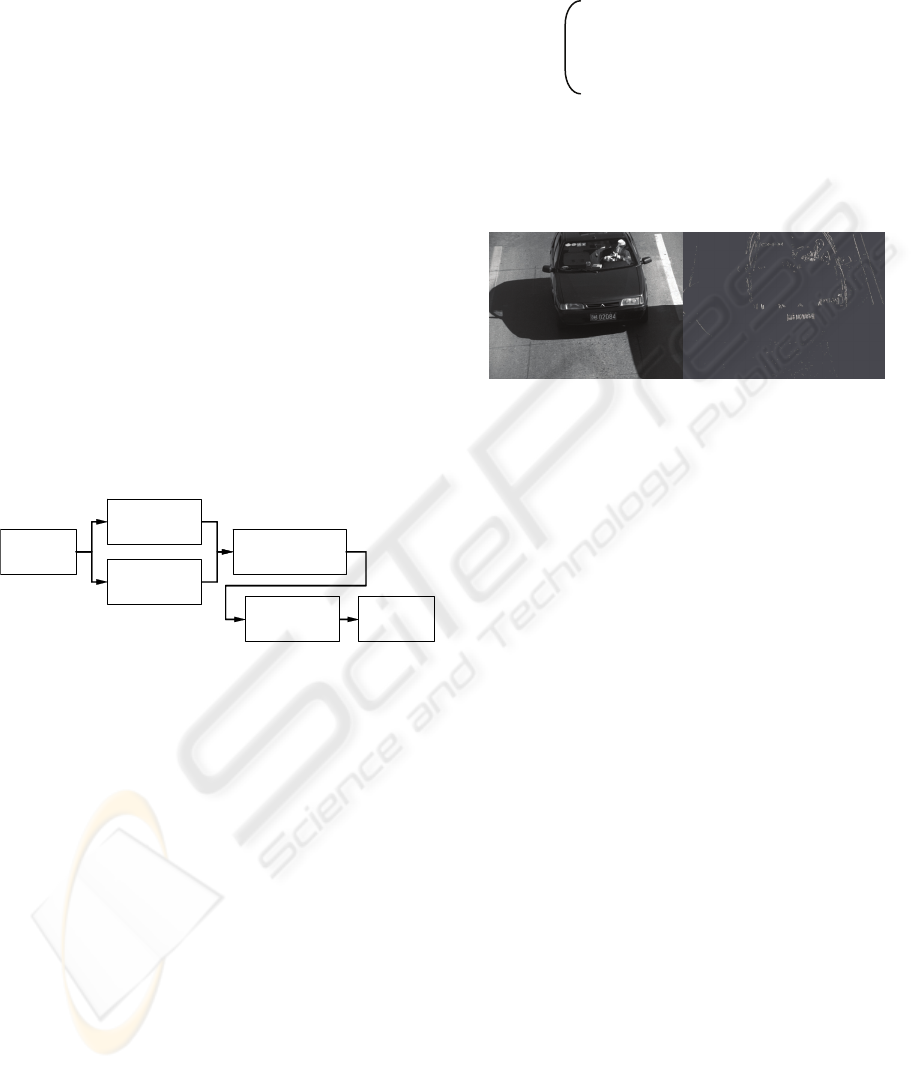
Figure 4 presents the block diagram of our license
plate area segmentation algorithm, using all these
features.
input image I
calculate
hue(p
xy
)'s
calculate
Edge
vertical
(p
xy
)'s
make a binary image I'
wit h score(p
xy
)'s
search for
the candidate areas
report the
best one.
Figure 4: Block diagram of our license plate area
segmentation system.
To simplify the area search process, we first
construct a binary image I
’
from an input image I. An
input image represented in the RGB color model is
converted into a HSV color model-based image. In
this HSV representation, we can get the grayscale
image of the original input image through extracting
the V(value) channel only. As explained in section
3.1, we apply the Sobel vertical edge operator to
calculate Edge
vertical
(p
xy
) values.
The H(hue) values of the HSV model are directly
used as hue(p
xy
),s.
For the Edge
vertical
(p
xy
) values, only the uppermost
10.02% of them are considered as the license plate
area pixels, using the threshold of Edge
vertical
(p
xy
)
≥
µ
edge
+ 1.33 σ
edge
, based on a statistical approach.
Similarly, the pixels with hue values of µ
hue
- σ
hue
≤hue(p
xy
)≤ µ
hue
+ σ
hue
are considered as the license
plate area pixels, as explained in section 3.2.
Combining these two restrictions, the final score
function score(p
xy
) for a pixel (p
xy
) is calculated as
follows:
1 if Edge
vertical
(p
xy
) ≥
μ
edge
+1.33
σ
edge
score(p
xy
) = and
μ
hue
-
σ
hue
≤ hue(p
xy
)≤
μ
hue
+
σ
hue
0 otherwise
where µ
edge
, σ
edge
, µ
hue
and σ
hue
are pre-calculated
values from a set of sample images.
Calculating score(p
xy
),s for all pixels in the input
image, we can construct a binary image I
’
as shown
in Figure 5.
Figure 5: Binary image of score(p
xy
).
In this binary image, we can easily find that the
pixels with score(p
xy
)=1 are certainly gathered in
the license plate area.
In Section 3.3, we show that the size of a license
plate area is always contained in wxh pixels, for our
camera configurations and resulting road images.
Thus, a rectangular area R with the size of wxh are
moved over the whole input image and the total
score of score(R)=∑p
xyЄR
score (p
xy
) are used to
finally find the license plate area. Conceptually, we
calculate all score(R) values for all possible wxh
size rectangular area R,s and sort the score(R)
values in a non-decreasing order. When some areas
with high score(R) values are overlapped, only the
maximum one is remained and others are removed
from the sorted list.
Our experimental results show that headlight
lamp areas and/or radiator grill areas can also show
high score(R) values in some cases for several
specific vehicle models and/or some specific
vehicle colors.
To remove these unexpected areas, at most three
areas with high score(R) values in the sorted list are
considered as strong candidates. Since the license
plates are usually located in the lower-center
portion, we prefer the one with lower location, and
additionally with high score(R) value, among the at
most three candidates. The overall skeleton of our
algorithm is shown as follows:
A METHOD FOR SEGMENTING AND RECOGNIZING A VEHICLE LICENCE PLATE FROM A ROAD IMAGE
417

Algorithm 2
input: a road image I (with a specific
camera configuration)
output: the license plate area
begin
list candidate = ∅
// calculate score function for each
pixel
for each pixel
Ip
xy
∈
do
calculate Edge
vertical
(p
xy
) and
hue(p
xy
)
set score(p
xy
)
// search for the candidate areas
for each possible location (x,y) in I do
set the rectangular region R at
(x,y)
calculate
∑
=
∈Rp
xy
xy
pscoreRscore )()(
candidate = candidate ∪ score(R)
remove overlapping areas in the candidate
list
sort the candidate list
// pick the best three candidates and
report the area
for i = 1 to 3 do
if the best candidate is located
in the acceptable area
or i = 3 then
report it as the number plate
area
else
discard the best candidate and
retry
end if
end
5 EXPERIMENTAL RESULTS
The algorithm represented in Section 3 was
implemented as a program using Visual Cpp. We
used 256 input images with 1280×960 resolutions,
which are captured by a CCD camera from a road.
In the preprocessing stage, we used 25 sample
images. Table 1 shows the experimental results.
Table 1: Experimental Results.
Classification Number Rate
Success 223 98.05%
Failure
Partial Segmentation 3 1.17%
Wrong Segmentation 2 0.78%
Total 228 100.00%
For the successful cases, the area fully including
the plate is segmented as the result. Our experiments
show 98.05% of success rate. The input images
include the cases: i) the plates are bent or decolorized,
ii) there are complicated equipments around the
plate, and iii) there are characters outside the plate.
Our algorithm successfully segmented the plate
areas of those cases (Fig. 6a).
We classified the cases when the segmentation
result does not include the whole plate but the
detection of plate position was right as a partial
segmentation. There was 1.17% of partial
segmentation (Fig. 6b). We had only 0.78% of
failure rate that failed to both of detecting and
segmenting the plate (Fig. 6c).
(a)
(b) (c)
(a) Success
(b) Partial segmentation
(c) Failure case
Figure 6: Segmentation results.
Other experiments have been performed to test
the proposed system and to measure his accuracy.
The test images were taken under various
illumination conditions (see Fig.7).
Figure 7: Recognition results for vehicle license plate.
6 CONCLUSIONS
In this paper, we presented an algorithm for
segmenting and recognizing the license plate area
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
418

from a road image. It has ability to correctly
recognize all license plates located in the picture, in a
short time, even if they are dirty or containing small
mechanical damages. We analyzed the feature of
plates by considering the distribution of vertical edges
inside the plate, the distribution of hue values from
the color of plates, and the geometric shape of the
plates. Based on those features, we constructed a
preprocessing stage that statistically analyzes the
sample plate images.
Given a road image, our algorithm computes its
binary image by using the thresholds derived in the
preprocessing stage. By moving a fixed-size window
over the binary image, we search candidate areas for
the plate, which has the local maximum accumulation
of pixel values. Our algorithm successfully detects
and segments the plate area for 98.05% cases from
256 input images.
The algorithm robustly detects and segments the
plate area even for the cases when the plate in the
image is inclined or transformed. It is also stable to
the changes of illumination, camera exposure, or the
decolorization of plates. In spite of relatively simple
preprocessing with a small number of sample images,
the experiments show high success rates.
According to the proved experimental results, one
can conclude that our method in comparison with
previous works on subject
(Sulehria, 2007),
(Arlazarov, 2008), (Ispas, 2008) is effective and fast
to be employed with the practical applications.
It arises from it the direct advantages as follows
1. The algorithm implementation area is remarkably
reduced.
2. The approximations leading to area reduction do
not cause significant sacrifices since any required
precision may be recovered when switching
regularly to the usual algorithm.
An important extension of this work is to
implement a new algorithm using hybrid process
based on neural network and Hough Transform to
analyze the geometric defaults obtained in edges of
images in the process. Further work is needed within
the proposed framework to improve provide flexible
bandwidth adaptation and robustness.
REFERENCES
D.G. Bailey, D. Irecki, B.K. Lim and L. Yang, 2002. Test
bed for number plate recognition applications.
Proceedings of 1
st
IEEE International Workshop on
Electronic Design, Test and Applications, Delta’02,
IEEE Computer Society.
T. Naito, T. Tsukada, K. Yamada, K. Kozuka, 2000.
Robust license plate recognition method for passing
vehicles under outside environment. IEEE
Transactions Vehicular Technology, 49 (6), pp. 2309-
2319.
C. Rahman, W. Badawy, A. Radmanesh, 2003. A real
time vehicle’s license plate recognition system. Proc.
of IEEE Conference on Advanced Video and Signal
Based Surveillance, pp. 163-166.
S.L, Chang YC, Chen Chung and SW Chen, 2004.
Automatic License Plate Recognition. IEEE
Transactions on Intelligent Transportation Systems,
5(1), pp. 42-53.
J. Matas, K. Zimmermann, 2005. Unconstrained License
Plate and Text Localization and Recognition. Proc. of
International Conference on Intelligent
Transportation System, pp. 572-577.
M Takatoo, M. Kanasaki, T. Mishima, T. Shibata, H. Ota,
1987. Gray scale image processing technology
applied to vehicle license number recognition system.
Proc. of IEEE International Workshop Industrial
Applications of Machine Vision and Machine
Intelligence, pp. 76-79.
Y Chui, Q. Huang, 1997. Automatic license extraction
from moving vehicles. Proc. of International
Conference Image Processing, pp. 126-129.
J.W. Hsieh, S.H. Yu, Y.S. Chen, 2002. Morphology
based license plate detection from complex scenes.
Proc. of 16
th
International Conference on Pattern
Recognition, Vol. 3, 176-179.
J.F. Xu, S.F Li, M.S. Yu, 2004. Car license plate
extraction using color and edge information. Proc. of
IEEE 3
rd
International Conference on Machine
Learning and Cybernetics, pp. 3904-3907.
D.S. Gao, J. Zhou, 2000. Car license plates detection
from complex scene. Proc. of 5
th
International
Conference on Signal Processing, pp. 1409-1414.
F.Yang, Z. Ma, 2005. Vehicle license plate location based
on histogramming and mathematical morphology.
Proc. of 4
th
IEEE Workshop on Automatic
Identification Advanced Technologies, pp. 89-94.
Chang Shyang-Lih, Chen Li-Shien, Wan Sei-Chen. 2004.
Automatic License Plate Recognition Intelligent
Transportation Systems, IEEE Transactions 5(1), pp.
42-45.
GA666-2006, People's Republic of China regulations for
vehicles number plates (in Chinese).
H.K. Sulehria, Y. Zhang, D. Irfan, 2007. Mathematical
morphology methodology for extraction of vehicle
number plates. International Journal of Computers,
WSEAS, 1 (3), pp. 312-319.
V.L. Arlazarov, M. Kazanov, 2008. Segmentation of
small objects in color images. Programming and
Computing Software, 34 (3), pp. 173-182.
I. Ispas, E. Franti, F. Lazo, 2008. The complexity of the
algorithms for the image recognition and
classification (IRC). Proceedings of the WSEAS
International Conference on Applied Computing
Conference, Istanbul, Turkey, pp. 160-164.
A METHOD FOR SEGMENTING AND RECOGNIZING A VEHICLE LICENCE PLATE FROM A ROAD IMAGE
419
