
MULTI-AGENT BASED SURVEILLANCE OF HUMAN
WORKFLOWS
Emmanuel Sardis, Vasileios Anagnostopoulos and Theodora Varvarigou
National Technical University of Athens - NTUA, Athens, Greece
Keywords: Multi-agent systems, Workflows, Recognition, Human workflows, JADE.
Abstract: Workflow recognition through processing of humans and objects in a camera sensor network, presents a
significant challenge recently. Human action recognition and sequence of actions manipulation, that
construct a workflow situation/rule, has many practical applications in many different real human
application environments. This article presents a multi agent based real time infrastructure, for recognizing
humans workflows, by evaluating and processing computer vision signals, from multiple cameras sensors.
The system architecture, the related agents’ infrastructure of the distributed environment of sensors, are
presented together with the algorithmic modules, that evaluate sensors signals into workflow events, and
related alarms’ outputs from the system. The article presents a full functional system that integrates the
distributed functionality of the multi agents’ infrastructure into real working environments, using the JADE
agents’ technologies. The evaluations of system simulation results are conclude this work, giving related
feedback for possible future architecture and implementation extensions.
1 INTRODUCTION
The problem of task recognition is of paramount
importance during industrial workflows. Accidents
and abnormal behavior happen very often and for
this reason it makes sense to develop automatic
visual surveillance systems that take advantage of
the recent progress of computer vision techniques to
monitor activity areas. Thus, increased safety of the
workers reduces operational costs and productivity
in some cases can also be improved. There is
generally a big gap between the perceived abnormal
behavior by humans, and the one perceived by
computer vision systems. The discrepancy is mainly
accounted for by the coarse information provided by
automatic systems. Moreover, a huge amount of
rules learned by experience helps humans identify
accidents and abnormal behavior.
Another big problem is the lack of flexibility.
Sub-tasks comprising a workflow do not happen in a
timely and a well-ordered manner. As a
consequence, we need relaxed rules that can define a
normal workflow execution. Instead of imposing
artificial constraints that could hinder the
productivity (like walking on a coloured line with a
tolerance of some centi-meters), which usually are
not well suited to the working environment and can
break down under unexpected circumstances, we
choose to construct generic systems that can encode
human experience in a high-level way. Such systems
are more amenable to be re-used, since application
specific systems are more expensive. By allowing
for high-level input we hope to decouple the
problem, from the requirement of specially trained
personnel with computer vision knowledge. Our
approach from a non-technical standpoint amounts
to partitioning the space in regions of interest and
monitor interesting activities there. The usage of a
multi-agent based architecture provides the required
infra-structure to achieve this goal. Its suitability
will be analyzed and proved in the following
sections.
Next sections present the status of the workflow
systems, section three suggests the decomposition in
micro-tasks and its justification, section four
analyzes the multi-agent underpinnings of the
proposed solution, and section five presents the main
system architecture and its technical analysis. In
section six we present the workbench environment
that was created in order to test our system with the
related results and evaluation notes. Finally, in
section seven, we conclude the article by discussing
future architecture extensions and research activities
for enhancing our proposed solution.
524
Sardis E., Anagnostopoulos V. and Varvarigou T..
MULTI-AGENT BASED SURVEILLANCE OF HUMAN WORKFLOWS.
DOI: 10.5220/0003305305240530
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 524-530
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 STATUS OF WORKFLOW
SYSTEMS
A workflow is defined as the computerized
facilitation or automation of a business process
(WfMS, 1999). It is composed of tasks, each of
which corresponds to a unit business task or another
business sub–process. The main steps of a workflow
execution is a repletion of (a) scheduling tasks, (b)
assigning tasks, and (c) obtaining results from the
environment until the entre workflow process
completes. Related workflow works propose the
usage of agents and web services like (Purvis et al.,
2004), (Vital et al., 2004), (Fleurke et al., 2003),
(Savarimuthu et al., 2004) and Service Oriented
Architectures like (Poggi, et al., 2007), (Mok et al,
2006), (Buhler et al., 2005), (Negri et al. 2006),
where they present a solution by integrating agent
technologies and SOA technologies, that is Web
services, workflow, rule engine and semantic Web,
or Petri Nets. Workflows and Agents technologies
are complementary to each other, and although there
has been a lot of work on integrating the two, no real
time applications and systems have been
implemented yet. In our case study and proposed
system solution, we are using a multi agent based
architecture, implemented and simulated with real
time camera sensors and a workbench environment.
3 THE CONCEPT OF
WORKFLOW MICRO-TASKS
The lack of regular execution of a workflow due to
sub-task ordering or inclusion of unrelated sub-tasks
makes the problem of workflow identification an ill-
posed problem.
The first step is to split the workflow into more
elementary tasks that can be combined to create the
workflow. There can be a multitude of ways to split
a workflow into subtasks. However, a good rule of
thumb is that, since we usually recognize more than
one workflow, we generally select the minimum
subset of possible micro-tasks that can give the
whole workflow. Moreover, we require that a task
be atomic, in other words we require that it cannot
be executed in different ways.
We will see now that there can be other
constraints that must be taken into account. Take as
an example the workflow where a security officer
moves through a corridor. We can assume the whole
movement to be a micro-task with some fixed
duration and tolerances. If however an accident or an
abnormal behavior happens and intervention is to be
expected, we should allow for some granularity in
the micro task splitting for efficiency reasons.
Suppose that the corridor can be accessed from two
doors at the beginning or the end of the corridor. It
makes sense to split the micro-task in two smaller.
The first is the movement from the beginning to the
middle of the corridor, and the second is the
movement from the end to the middle of the
corridor. In this way, we allowed for ad hoc rules
that subdivide the workflow. We can re-formulate
the above procedure as the definition of three
checkpoints, one at the beginning, one in the middle,
and one at the end. For this reason, we allow the
following micro-tasks.
Now let us try to generalize our approach, when two
security officers are sweeping the corridor back and
forth into opposite directions. We can require a rule
table like the following
Table 1. We see that the
allowed tasks and micro-tasks are the same in
number. However a micro task of the form <O1
Approaching Ch1, O2 Approaching Ch1> during
execution of task 2 can happen (the two officers are
talking about sports), and triggers an abnormal
behavior alarm.
Table 1: Security Officer Workflow.
Task
Check
point
Micro-task
Timing
(sequence
number)
1 1
Approaching Check
point 1 (Ch1)
1
2 1 Leaving Ch1 1
2 2 Approaching Ch2 2
3 2 Leaving Ch2 1
3 3 Approaching Ch3 2
4 3 Leaving Ch3 1
We see that the allowed micro tasks are in reality 12,
6 per officer and for this reason the micro-tasks
should not only describe normal, but also abnormal
behavior.
In more complex environments, the number of
micro-tasks can become overwhelming. The big
number of micro-tasks hints towards a distributed
implementation, while the synergy in sequencing
them in order to infer task execution hints towards
an agent based approach.
The solution we described above can be scaled to
industrial environments as a coarse way to identify
useful workflows with the help of computer vision.
It is true though that there are limitations on the size
and type of objects that can be efficiently identified.
MULTI-AGENT BASED SURVEILLANCE OF HUMAN WORKFLOWS
525

Table 2: Workflow with two Security Officers.
Task
Check
point
Micro-task
Timing
(sequence
number)
1 1
O1 Approaching Ch1,
O2 Approaching Ch3
2
2 1
O1 Leaving Ch1,
O2 LeavingCh3
1
2 2
O1 Approaching Ch2,
O2 Approaching Ch2
2
3 2
O1 Leaving Ch2,
O2 LeavingCh2
1
3 3
O1 Approaching Ch3,
O2 Approaching Ch1
2
4 3
O1 Leaving Ch3,
O2 Leaving Ch1
1
For this reason, we expect that a real solution
would also need the input from various other
sensors. As a result, we offer a uniform approach.
This has the welcome side effect that our system is
decoupled by the inaccuracies injected by the
various sensors, especially the computer vision
provided information. It is our feeling, that these
inaccuracies can be improved by use of more inputs
(eg. more cameras and related sensors), something
that can be done in practice. In our approach, we
concentrate especially on the computer vision
sensory input provided by cameras and processed by
computer vision algorithms like (Zhu et al., 2006)
and (Viola and Jones, 2001). The resulting outputs
of the sensors are usually in the form of bounding
boxes and some ids. Our goal first is to create check
points which act as “visual traps”. We put visual
checkpoints in places that are relevant to the
workflow and the accidents. This listing strongly
depends on the workspace, but can be calibrated by
the administrator without having specific knowledge
of the computer vision algorithms used. Objects,
check points and the attitudes of the objects with
respect to checkpoints (Leave/Approach) are the
input to our multi-agent system.
4 MULTI-AGENT BASED
SOLUTION
As we argued previously, the problem at hand hints
towards a multi-agent based solution. The synergy
between checkpoints and their autonomy in making
inferences shows that they can be implemented by
multi-agents. Moreover, the structure of them is
clearly the same and from the software point of view
they are processes that can be created or deleted by
the administrator, they can be migrated to adapt to
the computational resources, but more importantly
they are identical. They run the same algorithm,
having the same memory but their decisions and
actions rely on the actions of the other processes and
their data. We cannot think of a better solution other
than one provided by multi-agent systems. One can
argue that the problem is generic and has no
particular relation to an industrial environment. This
could be true, however industrial environments are
more constrained, have clearer workflow definition
and the earnings of the approach translate to
significant operational cost reduction with increased
productivity. For this reason, though our approach
has not special industrial characteristics at first sight,
it is suited and could potentially be reliable.
But there is another reason why checkpoints
(agents) are particularly useful for industrial
environment. Usual approaches rely on scene
separation algorithms, in order to identify tasks
(Coros, 2009) or to improve human detection. This
separation is too coarse to be of any value in an
industrial environment where scene separation is
very tight and the system reliability depends on it.
Moreover, the checkpoints are visual points that can
be synchronized between cameras, in an offline
phase or online (Yun and Park, 2006), without
interference to workflow execution. Use of RFID
tags is usually not an option in an industrial
environment and excessive use of other types of
sensors can be dangerous. Finally, since they are
visual, the administrator can manage them easily
because they have better semantic content. So we
reformulate the problem to adapt to the industrial
environment and the new formulation translates
immediately to agent architecture.
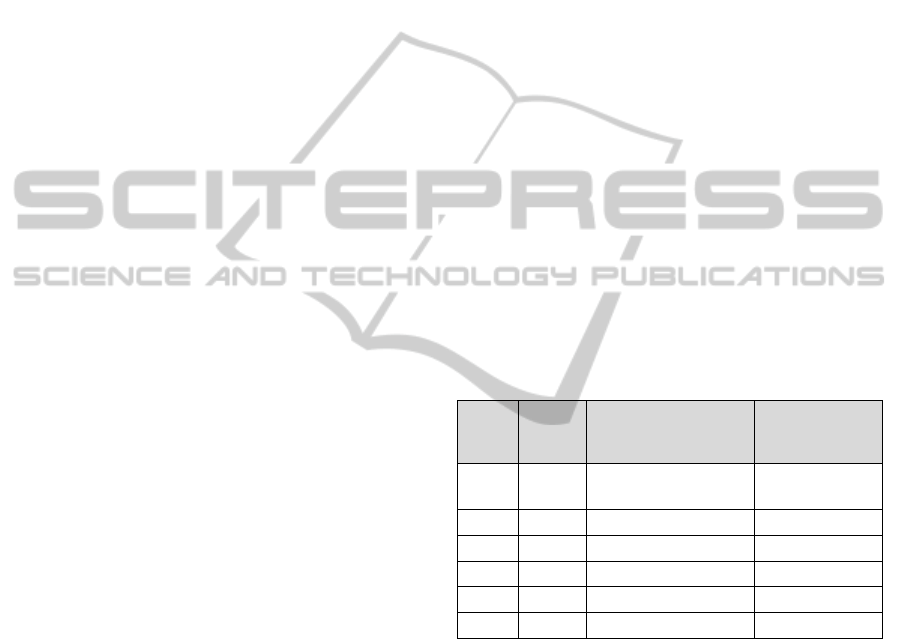
5 SYSTEM ARCHITECTURE
As communication architecture, we select a
bidirectional ring (Figure 1), where agents can send
and receive information between them, in other
words the communication topology is a broadcast
medium. The filtering of the messages is based on
their content. The messages are of the form of Table
3.
Table 3: Agent message format.
Field
Work-
flow Id
Check
point Id
Micro-
task Id
Alarm Dest.
Value
Integer
(Int)
Int Int Boolean Int
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
526
Figure 1: System Architecture.
It may happen that the workflow can have repeated
object motion with respect to the checkpoint. As we
can see from the above message, this can be dealt
because the micro-task id is the sequence number of
the micro-task in the workflow (see Table 4). This is
possible because the system has two designated
components (Figure 1).
The first is the workflow (rule) database that is
loaded to the agents at system startup/reset. This is
necessary since the administrator can create or
destroy checkpoints. For this reason, at system
startup or reset, cached agents are destroyed or new
one are created according to the surveillance
necessities. After the agent fixation process, each
one is loaded the rule table via broadcast.
The second designated component is the alarm
generator (Figure 1). We are now ready to describe
the agent algorithm and memory after initialization.
Table 4: Workflow entries in workflow list.
Field
Work-
flow Id
Sequence
number
Check-
point Id
Micro-
task Id
Time
out
Value
Integer
(Int)
Int Int Int Time
Table 5: Micro-task entry into rules.
Field
Micro-
task Id
Object Id Object Motion
Value Integer Integer Leave/Enter
A micro-task (Table 5) is a list of pairs of the form
(Object Id, Object Motion) with respect to
Checkpoint. Different objects can create different
micro-tasks, the role of the Object Id is to create a
binding of objects.
We say that O1/Leave-O2/Enter and O3/Leave-
O4/Enter realize the same micro-task, 1/Leave-
2/Enter with the binding (1:O1, 2:O2) and (1:O3,
2:O4). The binding happens at the first node which
activates the workflow for monitoring. The
algorithm description makes this clear (Figure 2). It
can be easily proved that this algorithm that
manipulates the workflow recognition system is
correct and its results are presented in the following
sections of the article through the simulation
screenshots of the Sniffer JADE tool.
Moreover, it encodes the intention of the
administrator to resume a workflow, if the alarm is
not fatal or to issue an alarm. We can observe that
the above algorithm does not interfere with disjoint
workflows, because of the aforementioned binding.
Also, it should be noticed that the algorithm takes
advantage of the synergistic nature of the agents to
solve the problem.
6 IMPLEMENTATION &
WORKBENCH
The algorithm we have presented is generic and
easily implementable using a standard agent
platform like JADE. However, we have to specialize
the micro-task description in the cases under
consideration. In constraint environments micro-
tasks can be comprised from lists of many people
since tasks are very specific. In other scenarios, like
market surveillance systems, multi-object micro-
tasks are more difficult to obtain, because there are
questions on bindings. This should be either
manually determined by the administrator, or
automatically by extra information. We decided to
emulate a scenario depicted in the well-known
Caviar dataset (EC Funded CAVIAR web site).
In specific, the scenario “Person stops outside
store, goes inside and out of store. Five groups of
MULTI-AGENT BASED SURVEILLANCE OF HUMAN WORKFLOWS
527

people walking along the corridor.” and “Person
goes inside and out of a store twice. Visible on
corridor view only: Group of 4 people comes out
store”. Since this scenario uses fixed cameras we
decided to implement it at our laboratory with
suitable camera placement. We also wanted to be
able to use as many people as possible, for future
experiments and extensive debugging. We used two
cameras like in the original scenario, and we
emulated the event of a human object entering the
shop, with the use of the laboratory door.
One camera faces the door from 5.5 meters, and
the other camera monitors the entering and leaving
the store events perpendicularly to the first. The
second camera was placed at distance 2 meters.
The workflow definition and the related points in the
working environment, where workflow triggers are
activated, are presented in the following Figure 3,
using the colored dots on the figure. We have used
two cameras that trigger the steps and the related
events in our multi agent platform, where the
recognized persons in scenes are giving input signals
to our algorithms, for evaluating and checking the
related workflow rules and the workflow recognition
label. Figure 3 shows the configured check points,
while Figure 4 shows an emulated customer entering
and leaving the store and micro-task events, while
passing the check points.
Figure 5 shows a sample of the exchanged
messages for this workflow, this is a normal
workflow. In order to decouple the problem from
computer vision, we used manual annotation of the
events. Our implementation is done in JAVA with
the JADE platform.
Algorithm (agent software)
Trigger: Agent N senses a realized micro-task.
Action: The agent searches the list of activated workflows to find those that wait on the
micro-task. Those found are now waiting for the next entry in their list if the
corresponding checkpoint is the same. Otherwise they are removed and create an active set.
For each member of the active set a message is sent with alarm false, workflow Id equal to
the member workflow Id, checkpoint and micro task id the next in the workflow. If the sensed
micro-task is not pending for some workflow, we activate the workflows that have it as a
first micro-task happening at this checkpoint. The workflow waits on the realized micro-
task. The agent is self-retriggered for this micro-task. If nothing is found a message is
sent to the alarm agent.
Trigger: Agent N senses a timeout for an active workflow.
Action: A message containing the corresponding workflow entries for the previous different
checkpoint in the workflow list and alarm true, is forwarded to the previous different
checkpoint. The workflow is deleted.
Trigger: Agent N receives a relevant message with alarm true from a check point.
Action: The agent searches the active sets for pending messages from the corresponding
checkpoint. The members are deleted. A message containing the corresponding workflow entries
for the previous different checkpoint in the workflow list and alarm true, is forwarded to
the previous different checkpoint. If deletion empties the active set an alarm is issued
towards the alarm agent.
Trigger: Agent N receives a relevant message with alarm false from a check point.
Action: The agent activates the workflow contained in the message and the activated workflow
waits for the entry in the message. The object binding is copied from the message.
Figure 2: Algorithm for manipulating workflow events.
Figure 3: Camera 205 (Trap point T4, red dot), Camera 206 (T1, blue dot), (T2, green dot), (T3, yellow dot).
Empty micro-task micro-task Empty micro-task Empty micro-task
Figure 4: Scene frames presenting related workflow micro-tasks per camera.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
528

continues….
Figure 5: A normal workflow announcement to the Alarm
Agent using JADE Sniffer tool.
Figure 6 shows a typical sequence of events for four
people entering the shop. Of course, the applicability
and the related workbench tests can be performed in
any computer vision video, but for the paper
purposes and tests of our algorithms, the normal
enter – leave sequence of events in parallel with the
computer vision human/objects detection was used.
Enter Person1, 2
LeavePerson1, 2
Figure 6: Enter-Leave micro-tasks for two human objects
at checkpoint 1.
Figure 7 shows the message exchange. This is a
normal workflow. In the first part of
Figure
7 7, enter events are shown between the
Sensor agent which multiplexes sensor readings. In a
real life implementation there is no Sensor agent,
since it is part of the Checkpoint agent. In the second
part of
Figure
7 7, the checkpoint 1 detects a leave event
and forwards the request to checkpoint 4 (the
perpendicular camera) according to case 4 of our
algorithm.
For the purposes of display, we have
implemented a small set of rules part of them are
shown in Table 6. The xml file used as a rule engine,
was constructed based on a simple format of object
id plus object behaviour (enter or leave).
Table 6: Sample workflow rules.
<?xml version="1.0"?>
<?xml-stylesheet type="text/css"
href="nutrition.css"?>
<listOfRules>
<rule><cluster rulePos="1" trapId="1">
<utask objectId="1"
objectBehavior="TRUE"/>
<utask objectId="1"
objectBehavior="FALSE"/></cluster>
<cluster rulePos="2" trapId="4">
<utask objectId="1"
objectBehavior="TRUE"/>
<utask objectId="1"
objectBehavior="FALSE"/></cluster>
...
Both Figure 5 and Figure 7 are presenting the agents
simulation results in JADE. The last message on the
agents simulation creates a ‘normal’ or ‘abnormal’
output, something that later can drive any extension
of our system for safety and security purposes using
multi agents implementations.
In the agents’ simulation windows used in this
article, we used four check points in our application
which are described as t1, t2, t3, t4. The alarming
agent is described as a1 and we describe the
emulated Sensor agent as s1 (it is only one since it
multiplexes the sensor readings). The scope of the
Sensor agent is to control and furthermore drive the
signals in system output or outputs according to the
connected on our system external modules. As we
have already explained above the system scope is to
drive safety and security external modules.
In the following figures, that describe message
exchanges between agents, we re-used existing
messages from JADE framework. Figure 8 shows
the scalability properties of our architecture. We plot
RAM consumption with increasing number of check
points (traps).
Continues…
Figure 7: A normal workflow with 4 human objects. First
part shows enter phase and second part leave phase with
message propagation to the next agent.
MULTI-AGENT BASED SURVEILLANCE OF HUMAN WORKFLOWS
529

As it is expected, it is almost linear which gives us
predictable performance in case we need a mapping
to the available resources. Our system was tested
using between 3-15 trap points in the related lab
videos. The system performance in multiple agents
usage (multi camera control) and under more trap
points per camera (agent) for a workflow of humans,
is an interesting test case.
Test case measurements are very complicated and
system performance is based on many different type
criteria. For our simple cases the system used for the
lab test followed the Figure 8 results.
Figure 8: Scalability of the proposed architecture.
7 CONCLUSIONS
Through this paper, we touched upon what seems to
be an appropriate framework for human workflow
analysis. We presented a few test cases where our
approach gives satisfactory answers using multi
agent systems architecture. We are in the start of
analyzing the challenges of workflow recognition
using “traps”. We see vast potential in recognising
single-object workflows by applying an agent for
controlling the related trap points. The multi-
object/human workflows are also common and they
are the main target of our current and future
research.
ACKNOWLEDGEMENTS
European Research project FP7 SCOVIS (ga.
216465).
REFERENCES
WfMS: Workflow Management Coalition Terminology
and Glossary – WfMS Specification, 1999.
Purvis, M. A.; Savarimuthu,; Purvis, 2004. A Multi-agent
Based Workflow System Embedded with Web
Services. In Proceedings of the second international
workshop on Collaboration Agents: Autonomous
Agents for Collaborative Environments (COLA 2004);
Ghorbani, A.; Marsh, S., Eds.; IEEE/WIC Press:
Beijing, China.
Vital, J., M., Buhler, P., and Stahl, C., 2004. Multiagent
systems with workflows. IEEE Internet Computing,
8(1): pp. 76-82, Jan/Feb 2004.
Fleurke, M., Ehrler, L., Purvis, M. A., 2003. JBees – An
Adaptive and Distributed Agent Based Workflow
System. In Proceedings of the International Workshop
on Collaboration Agents: Autonomous Agents for
Collaborative Environments (COLA 2003), Halifax,
Canada. IEEE/WIC Press. Ghorbani, A. and Marsh,
S., Ed.
Savarimuthu, B.T.R., Purvis, M.A., and Fleurke, M. 2004.
Monitoring and Controlling of a Multi-Agent Based
Workflow System. In Proceedings of the Australian
Workshop on Data Mining and Web Intelligence
(DMWI2004), Conferences in Research and Practice
in Information Technology, Vol. 32, Australian
Computer Society, Bedford Park, Australia, pp. 127-
132.
Poggi, A., Tomaiuolo, M., and Turci, P., 2007. An Agent-
Based Service Oriented Architecture. WOA 2007, pp.
157-165.
Mok, W.Y., Palvia, P., and Paper, D., 2006. On the
computability of agent-based workflows. In Decision
Support Systems, Volume 42 , Issue 3 (December
2006), pp. 1239 – 1253, Elsevier Publishers B. V.
Buhler, P.A., Vidal, J.M., 2005. Towards Adaptive
Workflow Enactment Using Multiagent Systems.
Information Technology Management 6(1), pp. 61-87.
Negri, A., Poggi, A., Tomaiuolo, M., Turci, P., 2006.
Agents for e-Business Applications, in Proc. AAMAS
2006, Hakodate, Japan.
Zhu Q., Yeh M.C,,Cheng K.T. and Avidan S. 2006 Fast
Human Detection Using a Cascade of Histograms of
Oriented Gradients. In Proceedings of the 2006 IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition (CVPR2006), Vol. 2, IEEE,
pp. 1491-1498.
Viola, P. and Jones, M. 2001 Rapid object detection using
a boosted cascade of simple features. In Proceedings
of the 2001 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition
(CVPR2001), Vol. 1, IEEE, pp. 511-518.
Coros K. 2009 Video Shot Selection and Content-Based
Scene Detection for Automatic Classification of TV
Sports News, Advances in Soft Computing, Vol. 64,
Springer, pp. 73-80, 2009.
Yun J.H. and Park R.H. 2006 Self-Calibration with Two
Views Using the Scale-Invariant Feature Transform.
Lecture Notes in Computer Science Vol. 4291
Springer , pp. 589-598.
EC Funded CAVIAR project/IST 2001 37540,
http://homepages.inf.ed.ac.uk/rbf/CAVIAR/
681
682
683
684
685
686
0 5 10 15
RAMconsumption
Numberoftrappoints
Systemscalability
RAM
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
530
