
ADAPTIVE BACKGROUND SUBTRACTION IN H.264/AVC
BITSTREAMS BASED ON MACROBLOCK SIZES
Antoine Vacavant
Clermont Universit´e, Universit´e d’Auvergne, ISIT, F-63000, Clermont-Ferrand, France
Lionel Robinault, Serge Miguet
Universit´e de Lyon, CNRS, Universit´e Lyon 2, LIRIS UMR5205, F-69676, Lyon, France
Chris Poppe, Rik van de Walle
Ghent University-IBBT, Multimedia lab, B-9050, Ghent, Belgium
Keywords:
H.264 Bitstream analysis, Background subtraction, Adaptive background modeling.
Abstract:
In this article, we propose a novel approach to detect moving objects in H.264 compressed bitstreams. More
precisely, we describe a multi-modal background subtraction technique that uses the size of macroblocks in
order to label them as belonging to the background of the observed scene or not. Here, we integrate an adaptive
Gaussian mixture-based scheme to model the background. We evaluate our contribution using the PETS video
dataset and a realist synthetic video sequence rendered by a 3-D urban environment simulator. We compare
two different background models, and we show that the Gaussian mixture-based is the best and outperforms
other techniques that use macro bloc sizes.
1 INTRODUCTION
H.264/AVC (Wiegand et al., 2003) is the newest video
coding standard developed by the Joint Video Team
(JVT), and overtakes its predecessors (e.g. MPEG-4)
by higher compression performances and various pro-
files. Moreover, H.264/AVC permits to deliver high
quality videos for local or network interfaces. Nowa-
days, the analysis of compressed H.264 bitstreams for
object detection and tracking is an important chal-
lenge for many video surveillance applications. In-
deed, they generally need to process large volumes of
video streams while transferring or storing them.
Many approaches for moving object detection an-
alyze the motion vectors (MV) encoded in the mac-
roblocs (MB) of a bitstream (De Bruyne et al., 2009;
Mehmood et al., 2009; Liu et al., 2007; Solana-Cipres
et al., 2009; You et al., 2007). However, MV are use-
ful to make the compression rate optimal, but they
do not reliably represent the motion of the moving
objects. Moreover, these vectors are very noisy and
a post-processing filter is necessary to improve the
movement estimation. Poppe et al. (Poppe et al.,
2009) propose to consider the size of a MB in order to
decide if it belongs to the background or to a moving
object. They show that their approach is more pre-
cise than MV based approaches (by considering recall
and precision), and this is a fast algorithm, convenient
for real-time applications. In this method, the back-
ground model is carried out by computing the maxi-
mal size of MB during the learning phase, where it is
supposed that no object appears in the filmed scene.
Here, we propose to integrate and to compare the
Gaussian mixture model (GMM) and the VuMeter
(VUM) in order to build adaptive background mod-
els based on MB sizes. We show that the GMM is
the best approach to represent the distribution of MB
sizes. The first method is a statistical approach that
was first introduced by (Stauffer and Grimson, 1999)
in the classical image domain to represent several dis-
tributions of pixel values. The second model was
established by (Goyat et al., 2006) and is based on
a discrete representation of the distribution of pixel
colors. There exists numerous adaptive background
models in the literature. Many authors search to
improve the GMM, e.g. (Chen et al., 2007; Kaew-
51
Vacavant A., Robinault L., Miguet S., Poppe C. and van de Walle R..
ADAPTIVE BACKGROUND SUBTRACTION IN H.264/AVC BITSTREAMS BASED ON MACROBLOCK SIZES.
DOI: 10.5220/0003364000510058
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 51-58
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
trakulpong and Bowden, 2001; Poppe et al., 2007;
Tuzel et al., 2005; XiaHou and Gong, 2008; Zivkovic,
2004), while other introduced new methodologies,
like codebooks for example (Kim et al., 2005; Sigari
and Fathy, 2008). In this article, we have chosen a
very classical model (GMM) and an other approach
not based on Gaussian mixtures, VUM, which has
been recently demonstrated as an efficient algorithm
in (Dhome et al., 2010). In our system, we are thus
able to model the size of MB thanks to complex dis-
tributions. Moreover, we can handle all frame modes
(i.e. I, B and P frames) with our method.
This article is organized as follows. In Section 2,
we present the two adaptive models we have devel-
oped for background subtraction in H.264/AVC bit-
streams. Then, we compare these methods in terms
of quality of segmentation with related work by using
various (synthetic and ”real”) video data sets.
2 PROPOSED METHODS FOR
BACKGROUND SUBTRACTION
IN H.264/AVC BITSTREAMS
2.1 Related Work and Motivation
Our method uses the size of a bitstream MB (in bits)
to classify it into background or foreground. The
main idea is thus that a MB representing a moving
object should be more voluminous than if it contains
only background. A first idea could be to use a simple
threshold to determine if a MB is foreground or not,
with its size Z
t
at time t:
Z
t
> T
STH
(1)
In (Poppe et al., 2009), the authors build the back-
ground model Z
MAX
by computing the maximal value
of the size of a given MB during the learning phase.
During the detection phase, a MB is first considered
as foreground if its size Z
t
respects:
Z
t
> Z
MAX
+ T
MAX
(2)
where T
MAX
is a given threshold for a given MB. This
model has several limitations.
It supposes that the background of the observed
scene is stationary; i.e. no update operation is carried
out during the detection phase. Even if this choice
may be convenient for several video surveillance ap-
plications, an adaptive background model is generally
a better solution. Indeed, the model of the MB size
should evolve during (maybe very long) stream pro-
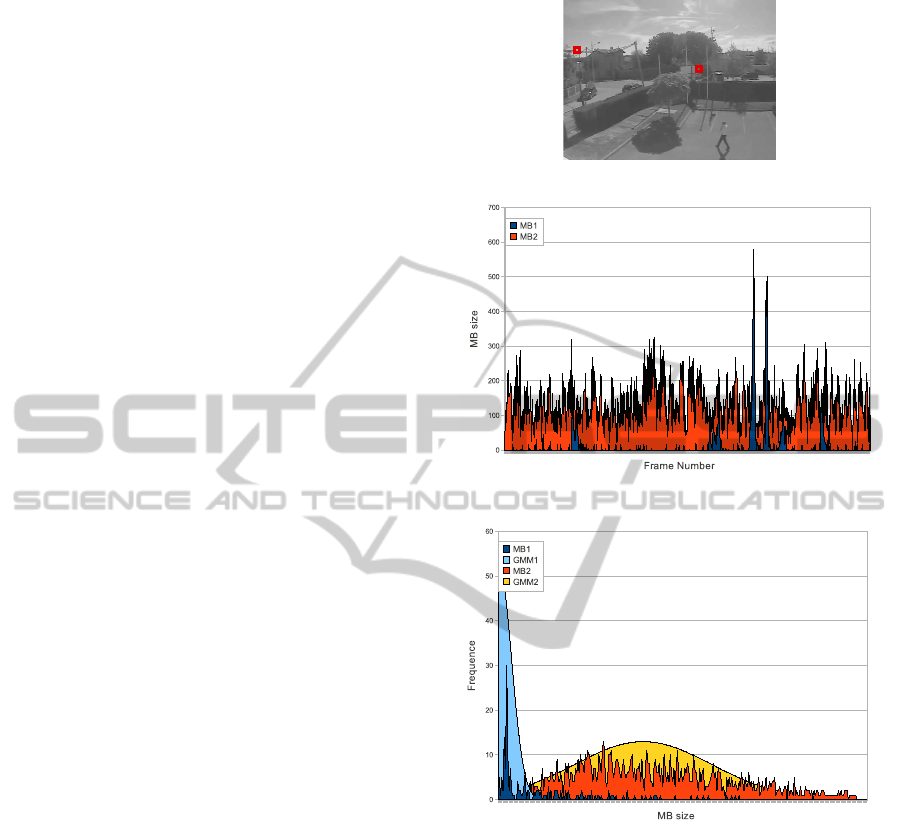
cessing time. We show in Figure 1 the evolution of
MB sizes in a real video, where we have chosen two
MB2
MB1
(a)
(b)
(c)
Figure 1: We consider a real video, where we have chosen
two MB (a). Figure (b) represents the size of the chosen
MB during acquisition time, and (c) the distribution of MB
sizes.
particular MB. In (a), we have depicted them, the first
MB (MB1) represents an uniform background, where
an object passes through during the video. MB2 is
placed on a complex background, where no moving
object passes through. In Figure 1-(b), we show the
evolution of both MB during acquisition time. We can
notice that the MB size may be significantly different
if it represents complex environment or not. More-
over, we can see that MB2 size may be greater than
the one of MB1 when it contains a moving object.
We have measured that new objects in complex MB
does not imply necessary a greater augmentation than
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
52

in uniform MB. Hence, a single threshold for all MB
is not a convenient solution for every H.264/AVC MB
configurations. The distribution of sizes of each MB
(Figure 1-(c)) may be modeled thanks to one normal
law. In this figure, we have shown this result with
the MB1 and MB2 sizes distributions (respectively
blue and yellow plots). One more time, we show that
Equation 2 does not lead to a relevant representation
of background MB in video sequences.
Furthermore, only MB size from P frames are re-
ally represented in the model chosen in (Poppe et al.,
2009). I frames are treated separately, since the MB
sizes are sensibly larger than in P frames, and the
case of B frames is not discussed. A more complex
background model should represent the various frame
modes available in H.264/AVC standard. The purpose
is to propose a generic approach that could be adapted
for both real-time applications using smart cameras
and off-line video processing systems.
As a consequence, in our method, we represent
the distribution of sizes of a given MB thanks to two
adaptive background models. We finally show that
the Gaussian-based model is the more efficient, since
its representation fits the best to the MB sizes distri-
bution.
2.2 Adaptive Background Models based
on H.264/AVC MB Sizes
In the GMM, at time t, we consider that the
model M
t
generated for each MB from the measures
{Z
0
,Z
1
,.. ., Z
t−1
} is correct. The likelihood that a MB
is a background MB is (Stauffer and Grimson, 1999;
Hayman and Eklundh, 2003):
P(Z
t
| M
t
) =
i=N
∑
i=1
α
i
N (µ
i
,σ
i
) (3)
N (µ
i
,σ
i
) =
1
(2π)
1/2
|σ
i
|
1/2
e
−
1
2
(Z
t
−µ
i
)
T
σ
i
−1
(Z
t
−µ
i
)
(4)
Here, once we have extracted the size Z
t
(in bits) of
a macroblock MB
t
(or simply MB) at time t in the
bitstream, we test if Z
t
belongs to the GMM by con-
sidering each Gaussian distribution G
i
(with normal
law N (µ
i
,σ
i
)) (Cheung and Kamath, 2004):
Z
t
− µ
i
≤ k σ
i
(5)
implies that Z
t
belongs to the Gaussian distribution
G
i
. In this equation, k is a constant that is generally
between 1 and 4. If Z
t
does not belong to any Gaus-
sian in the GMM, then the associated MB is consid-
ered as foreground.
For the VUM model, the MB sizes are modeled
with a discrete distribution with N bins. A MB can
take two states, (ω
1
) if the MB is background, (ω
2
) if
the MB is foreground. This method estimates P(ω
1
|
Z
t
). The probability density function can be approxi-
mated by (Goyat et al., 2006; Dhome et al., 2010):
P(ω
1
| Z
t
) ≈ K
i
N
∑
j=1
π
j
t
δ(b
t
− j) (6)
where δ is the Kronecker delta function, b
t
gives the
bin index vector associated to Z
t
, j is a bin index, and
K
i
is a normalization constant to keep at each moment
∑
N
j=1
π
j
t
= 1. π
j
t
is a discrete mass function which
is represented by a bin. After a lot of images, the
bins which are modeling the background have a high
value. To choose at each moment if a MB is back-
ground or not, a threshold T
VUM
is set. Each new MB
with corresponding bins under T
VUM
will be detected
as background, foreground otherwise.
2.3 Global System for Background
Subtraction Adapted to H.264/AVC
Bitstreams
If the adaptive background model chosen (GMM or
VUM) classifies a MB as foreground (Figure 2, test
#1), then we check if MB is a skipped MB or not (Fig-
ure 2, test #2). This special kind of MB, defined in the
H.264/AVC standard (Wiegand et al., 2003), repre-
sents a MB where no residual data has been computed
during the encoding process. In this case, we have to
consider the set of MB according to the V
MB skipped
neighbourhood (see Figure 2, test #3, and also Fig-
ure 3). Indeed, these MB are used during the decoding
process to reconstruct a valid skipped MB. In this test,
we suppose that if surrounding MB are foreground,
then the skipped MB is too, otherwise this is a back-
ground MB. In this latter case, we apply a spatial fil-
ter (Figure 2, test #4); that is, we assume that if at
least four MB are foreground within the set of neigh-
bor 8 connected MB, then the current treated MB is
assigned as foreground (background otherwise).
In the case where Equation 5 fails or when pre-
vious tests #3, #4 return true, MB is finally assigned
foreground if the temporal filter (Figure 2, test #5) is
verified. This filter allows to keep the MB at time t as
foreground if MB
t−1
or MB
t+1
are foreground. If this
last test fails, then MB is considered as background,
and it is possible to update the adaptive model cho-
sen. The waved line represented in Figure 2 means
that this operation may be carried out with a lower
frame rate, to decrease computational cost and pos-
sibly decrease over learning effects (Cheung and Ka-
math, 2004). If the background model is based on
a valid learning phase (with correct conditions of ac-
quisitions, the scene does not contain moving objects
ADAPTIVE BACKGROUND SUBTRACTION IN H.264/AVC BITSTREAMS BASED ON MACROBLOCK SIZES
53
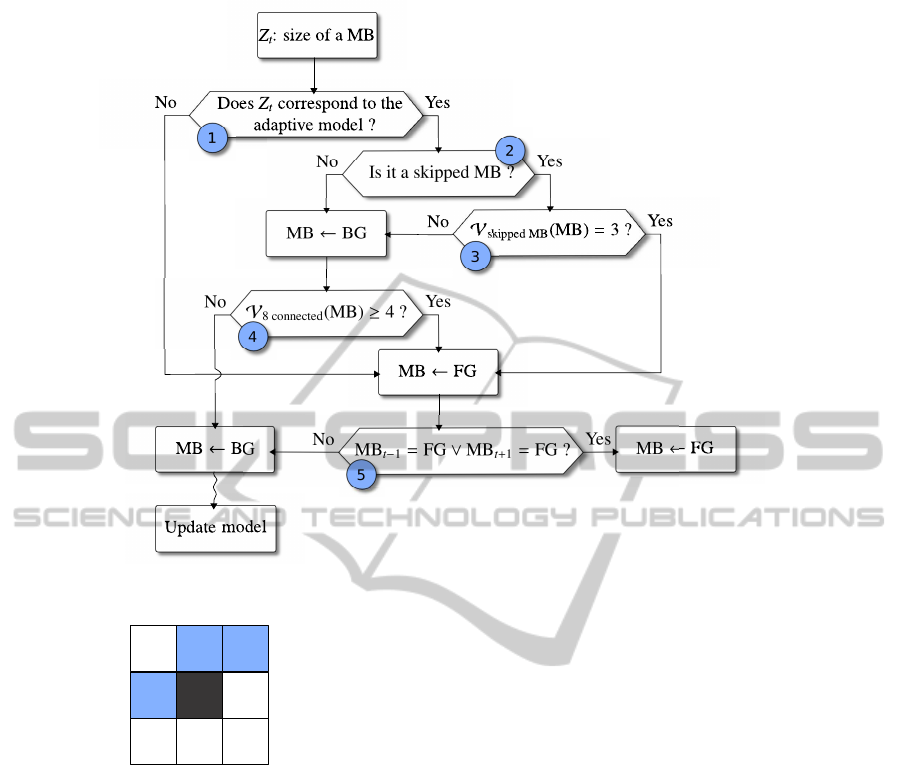
Figure 2: Global flow chart of our method.
Figure 3: From a given MB (central dark MB), the
V
MB skipped
neighbourhood only contains the three fore-
ground MB. The central MB is then assigned to foreground.
during long time, etc.), we can also skip this final up-
date procedure during the detection phase.
In the next section, we propose to compare our
contribution with related work thanks to various video
datasets.
3 EXPERIMENTAL ANALYSIS
We first have to recall that the use of the MB sizes
was shown to overcome many MV based algorithms
in (Poppe et al., 2009). Hence, we propose to com-
pare our adaptive approaches with related works us-
ing MB sizes. If we show that our contribution based
on GMM is better than previous work, then by exten-
sion, it should overcome these MV based techniques.
In our experiments, we consider PetsD2TeC2 and
Indoor sequences, that were introduced in the PETS
2005 workshop (Brown et al., 2005), and a real
video obtained from our visual surveillance activities
(FStream). For these videos, we have manually la-
beled the desired ground truth every 50 frames, which
allows us to compare the quality of our background
subtraction algorithms, with respect to the one based
on Equation 2. We denote our two adaptive algo-
rithms by GMM and VUM respectively and by MAX
the previous work based on the maximal size. The
simple threshold method we have illustrated through
Equation 1 is denoted by STH in the following. More-
over, a complete realist 3D urban environment ren-
derer has been developed using the LIVIC SiVIC sim-
ulator (Gruyer et al., 2006) to generate an other syn-
thetic video. Thanks to this software, we are also
able to compute exactly the associated ground truth
of this sequence (see Figure 4 for an illustration of
each video in a gray level color mode).
Since we propose a MB-based output, we con-
sider a ground truth defined on the MB domain. If
we consider pixel-based ground truth, our benchmark
may be built by assigning a MB as foreground if at
least one pixel is foreground inside this MB. Once we
have computed the true/false positives TP
i
, FP
i
and
the true/false negatives TN
i
, FN
i
of each frame i, we
can consider the recall and the precision of each class:
Re
i
(P) = TP
i
/(TP
i
+ FN
i
) (7)
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
54
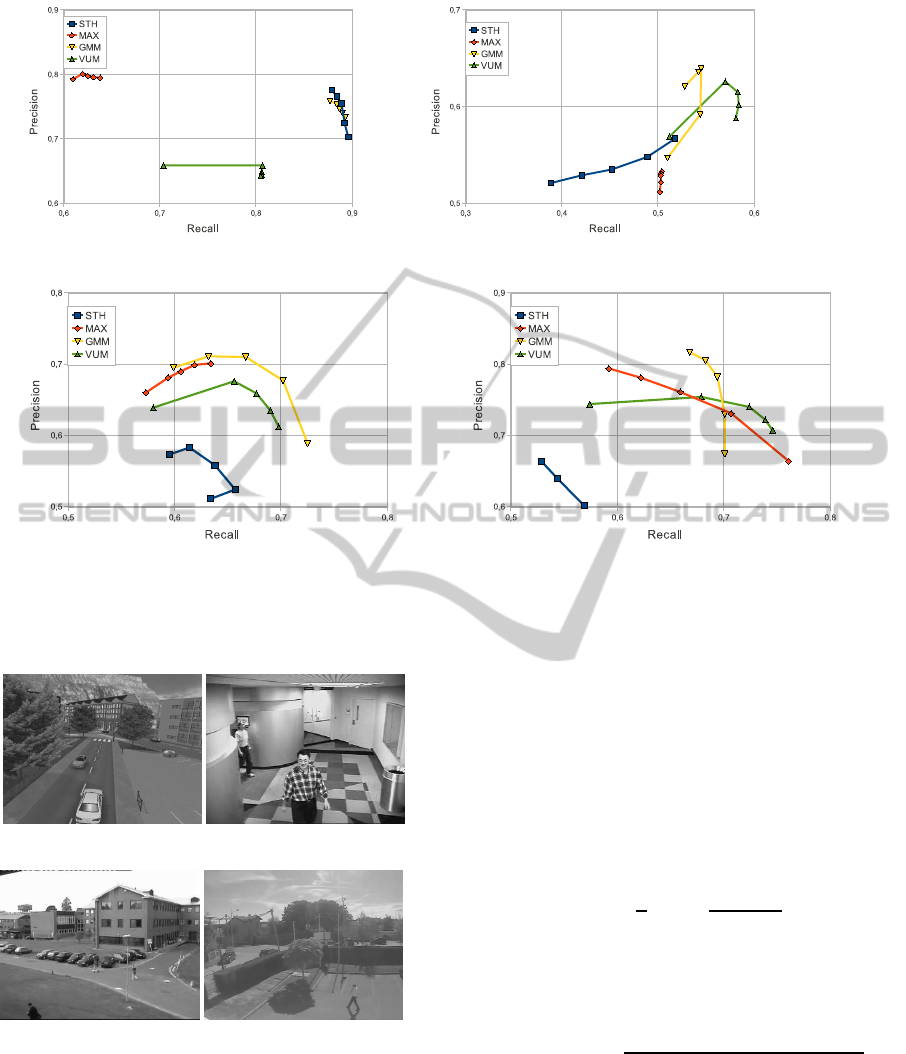
(a) Synth12 (b) Indoor
(c) PetsD2TeC2 (d) FStream
Figure 5: Recall/precision curves for STH, MAX, GMM and VUM algorithms and for each video sequence: (a) Synth12, (b)
Indoor, (c) PetsD2TeC2, and (d) FStream. Please note that the X and Y scales are different from one plot to an other.
(a) (b)
(c) (d)
Figure 4: One frame from each video sequence we have
chosen for our experiments: (a) Synth12, (b) Indoor, (c)
PetsD2TeC2, (d) FStream.
Re
i
(N) = TN
i
/(TN
i
+ FP
i
) (8)
Pr
i
(P) = TP
i
/(TP
i
+ FP
i
) (9)
Pr
i
(N) = TN
i
/(TN
i
+ FN
i
) (10)
This leads to the classical recall and precision val-
ues that are the means of the following Pr
i
and Re
i
values:
Pr
i
= (Pr
i
(P) + Pr
i
(N))/2 (11)
Re
i
= (Re
i
(P) + Re
i
(N))/2 (12)
In our experiments, we also consider the classical
F-measure that was recently used in an other work
about the comparison of background subtraction al-
gorithms (Dhome et al., 2010):
F =
1
n
n
∑
i=1
2×
Pr
i
× Re
i
Pr
i
+ Re
i
(13)
for a video sequence of length n.
Moreover, we compute the PSNR (Peak Signal
Noise Ratio), which is defined as:
PSNR = 10log
10
mn
∑
n−1
i=0
∑
m−1
j=0
||I(i, j) − I
r
(i, j)||
2
!
(14)
where I and I
r
are respectively the tested image and
the ground truth image, of size mn.
Figure 5 presents the recall/precision curves as-
sociated to each algorithm, and for each video se-
quence (Synth12, Indoor, PetsD2TeC2, FStream).
In the STH method, we have chosen the thresh-
old T
STH
= {50,100,150,200,250}. We have also
ADAPTIVE BACKGROUND SUBTRACTION IN H.264/AVC BITSTREAMS BASED ON MACROBLOCK SIZES
55
Table 1: The F measure observed for STH, MAX, GMM and VUM algorithms (a), the mean of the three best F measures
(b), and the PSNR (c). For a given measure, we indicate within parenthesis the ranking of each approach, we then depict the
global ranking of the algorithms for each measure, and the one for all the measures (d).
(a) Best F
Synth12 Indoor PetsD2TeC2 FStream Global ranking
STH 0.820 (1) 0.521 (3) 0.586 (4) 0.606 (4) 3
MAX 0.701 (4) 0.511 (4) 0.657 (2-ex) 0.715 (3) 4
GMM 0.808 (2) 0.581 (2) 0.676 (1) 0.734 (1) 1
VUM 0.722 (3) 0.594 (1) 0.657 (2-ex) 0.727 (2) 2
(b) 3 best F
Synth12 Indoor PetsD2TeC2 FStream Global ranking
STH 0.797 (2) 0.485 (4) 0.643 (4) 0.594 (3) 3
MAX 0.697 (4) 0.510 (3) 0.648 (3) 0.707 (3) 4
GMM 0.807 (1) 0.574 (2) 0.671 (1) 0.732 (1) 1
VUM 0.713 (3) 0.591 (1) 0.654 (2) 0.725 (2) 2
(c) PSNR
Synth12 Indoor PetsD2TeC2 FStream Global ranking
STH 24.230 (2) 5.753 (4) 19.135 (4) 21.400 (3) 3
MAX 25.034 (1) 23.757 (1) 24.875 (1) 21.657 (2) 1
GMM 23.427 (3) 22.766 (2) 24.749 (2) 22.701 (1) 2
VUM 21.934 (4) 20.557 (3) 23.277 (3) 21.162 (4) 4
(d) Final ranking
F measure 3 best F PSNR Final ranking
STH 3 3 3 3-ex
MAX 4 4 1 3-ex
GMM 1 1 2 1
VUM 2 2 4 2
considered the MAX algorithm with the threshold
T
MAX
= { 0,20, 40,60,80} for the P frames in Equa-
tion 2, and we have imposed another threshold for B
frames by supposing that they are 2.5 larger than P
frames. For our contribution GMM, we have chosen
k = {2.0,2.5,3, 3.5,4.0} in Equation 5 and one Gaus-
sian for each mode (I, B, P). VUM is parametrized
with T
VUM
= {0.01, 0.05, 0.10, 0.15,0.20}.
We can notice that GMM has better performance,
and a more stable behavior than STH, MAX and
VUM for the four videos. This fact is also numer-
ically observable if we consider the best F measure
and the mean of the three best F measure for each al-
gorithm (see Table 1). A particular case can be ob-
served on the Synth12 video, where STH is better
than GMM with F measure, but not with the mean of
the three best F. If we now consider the best PSNR of
each method, we can notice that the VUM and STH
algorithm are always the worst ones. Moreover, the
use of the thresholds T
STH
in STH is a worse solution
than using high thresholds as in MAX for real videos
Indoor, PetsD2TeC2 and FStream. GMM is the best
for FStream video, GMM and MAX are very close for
PetsD2TeC2 video, and MAX is the best for Synth12.
The differences between F and PSNR results may be
explained by the fact that the PSNR is very sensitive
to noise, which means that false positive detections
of VUM algorithms and false negative detections of
STH highly alter this measure for example. We have
also illustrated the results of STH, MAX, GMM and
VUM algorithms in Figure 6 with output images la-
beled with different colors (see figure for explana-
tions). One can notice that GMM is the best algo-
rithm on Synth12, Indoor and FStream videos, since
its result contains the greatest number of true posi-
tive MB. The main problem of VUM model is that
it may produce too many false positive detections,
whereas MAX algorithm can lead to a high number
of false negative MB (see FStream video). Visual ex-
periments show that the GMM approach is the best
compromise.
Finally, we have also measured that the mean ex-
ecution time of STH, MAX, GMM and VUM al-
gorithms is by 45 fps for PetsD2TeC2 and Indoor
(of size 384x288), while the one for Synth12 and
FStream (of size 640x480) is by 35 fps. These ex-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
56
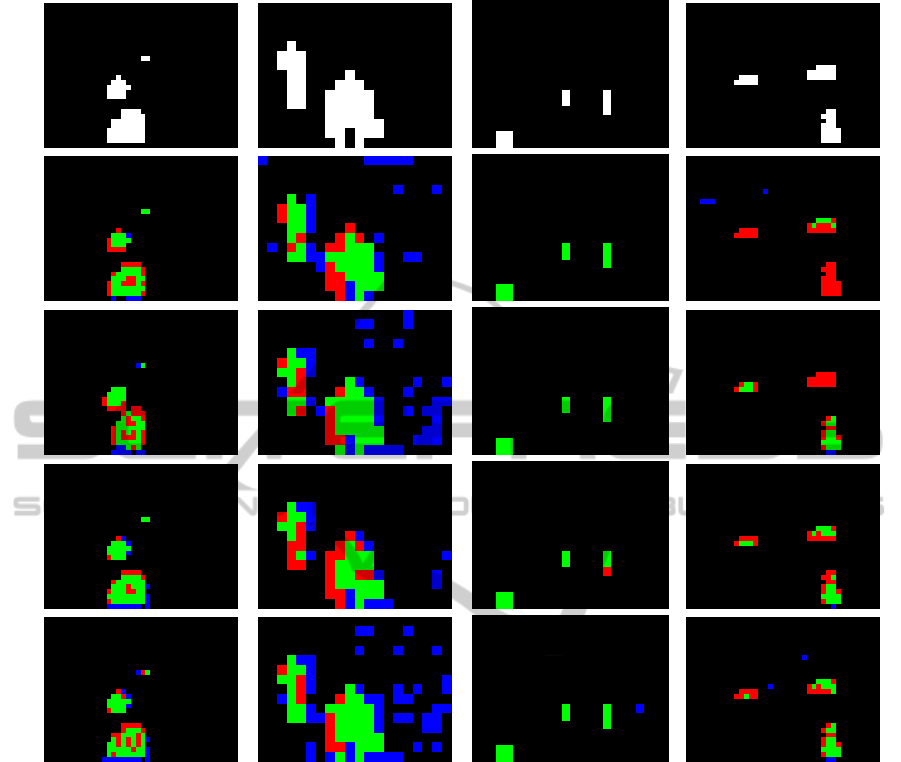
(a)
GT
(b)
STH
(c)
MAX
(d)
GMM
(e)
VUM
Synth12 Indoor PetsD2TeC2 FStream
Figure 6: Outputs of the tested algorithms for (from left to right) Synth12, Indoor, PetsD2TeC2 and FStream. We have
presented the result of STH algorithm (b) MAX algorithm (c), GMM algorithm (d) and VUM algorithm (e), and the associated
ground truth (a). Colors represent: TP/green, TN/black, FN/red, FP/blue.
periments have been driven on a workstation with an
2.2 Ghz Intel
R
Core
TM
2 Duo processor and 2 Gb
RAM. Hence, our contributions can be implemented
within real-time applications.
4 CONCLUSIONS AND FUTURE
WORK
In this article, we have presented a novel algorithm
for background subtraction in H.264/AVC bitstreams,
by using the size of macroblocs. We have integrated a
GMM into the background model for all frame modes
(I, B, P). We have shown that the quality of extraction
is improved thanks to recall/precision curves and nu-
merical measures, in comparison with previous work
and an other adaptive background model (VUM).
Moreover, we can still treat videos in real-time appli-
cations since the execution time is very competitive.
As a future work, we plan to carry out a complete
evaluation of the best parameters of our GMM algo-
rithm w.r.t. various video datasets. We could inte-
grate other adaptive background models to classify
macrobloc sizes. Another interesting way could be
to refine the result of our algorithm by developing
a sub-MB extraction phase, and to test this method
for (maybe long term) object tracking applications in
video-surveillance. Finally, we are currently devel-
oping a real-time on-board application for video pro-
cessing within a smart camera, which uses our contri-
bution.
ADAPTIVE BACKGROUND SUBTRACTION IN H.264/AVC BITSTREAMS BASED ON MACROBLOCK SIZES
57

REFERENCES
Brown, L. M., Senior, A. W., Tian, Y., Connell, J., Ham-
papur, A., Shu, C., Merkl, H., and Lu, M. (2005).
Performance evaluation of surveillance systems under
varying conditions. In IEEE International Workshop
on Performance Evaluation of Tracking and Surveil-
lance (PETS). http://www.research.ibm.com/people
vision/performanceevaluation.html.
Chen, Y.-T., Chen, C.-S., Huang, C.-R., and Hung, Y.-P.
(2007). Efficient hierarchical method for background
subtraction. Pattern Recognition, 40(10):2706–2715.
Cheung, S. S. and Kamath, C. (2004). Robust techniques
for background subtraction in urban traffic video. In
Proceedings of SPIE, volume 5308, pages 881–892.
De Bruyne, S., Poppe, C., Verstockt, S., Lambert, P., and
Van de Walle, R. (2009). Estimating motion reliability
to improve moving object detection in the h.264/avc
domain. In IEEE International Conference on Multi-
media and Expo (ICME), pages 330–333.
Dhome, Y., Tronson, N., Vacavant, A., Chateau, T., Gabard,
C., Goyat, Y., and Gruyer, D. (2010). A benchmark
for background subtraction algorithms in monocular
vision: a comparative study. In IEEE International
Conference on Image Processing Tools, Theory and
Applications (IPTA). To appear.
Goyat, Y., Chateau, T., Malaterre, L., and Trassoudaine, L.
(2006). Vehicle trajectories evaluation by static video
sensors. In IEEE Intelligent Transportation Systems
Conference (ITSC), pages 864–869.
Gruyer, D., Royere, C., du Lac, N., Michel, G., and Blos-
seville, J.-M. (2006). SiVIC and RTMaps, intercon-
nected platforms for the conception and the evaluation
of driving assistance systems. In World Congress and
Exhibition on Intelligent Transport Systems and Ser-
vices (ITSC), pages 1–8.
Hayman, E. and Eklundh, J.-O. (2003). Statistical back-
ground subtraction for amobile observer. In IEEE In-
ternational Conference on Computer Vision (CVPR).
Kaewtrakulpong, P. and Bowden, R. (2001). An im-
proved adaptive background mixture model for real-
time tracking with shadow detection. In European
Workshop on Advanced Video Based Surveillance Sys-
tems (AVSS).
Kim, K., Chalidabhongse, T., Harwood, D., and Davis, L.
(2005). Real-time foreground-background segmen-
tation using codebook model. Real-time Imaging,
11(3):167–256.
Liu, Z., Lu, Y., and Zhang, Z. (2007). Real-time spatiotem-
poral segmentation of video objects in the H.264 com-
pressed domain. Journal of Visual Communication
and Image Representation, 18(3):275–290.
Mehmood, K., Mrak, M., Calic, J., and Kondoz, A. (2009).
Object tracking in surveillance videos using com-
pressed domain features from scalable bit-streams.
Image Communication, 24(10):814–824.
Poppe, C., De Bruyne, S., Paridaens, T., Lambert, P., and
Van de Walle, R. (2009). Moving object detection in
the H.264/AVC compressed domain for video surveil-
lance applications. Journal of Visual Communication
and Image Representation, 20(6):428–437.
Poppe, C., Martens, G., Lambert, P., and Van de Walle,
R. (2007). Improved background mixture models for
video surveillance applications. In Yagi, Y., Kang, S.,
Kweon, I., and Zha, H., editors, ACCV 2007, volume
4843 of LNCS, pages 251–260. Springer.
Sigari, M. H. and Fathy, M. (2008). Real-time back-
ground modeling/subtraction using two-layer code-
book model. In International MultiConference of En-
gineers and Computer Scientists.
Solana-Cipres, C., Fernandez-Escribano, G., Rodriguez-
Benitez, L., Moreno-Garcia, J., and Jimenez-Linares,
L. (2009). Real-time moving object segmentation in
H.264 compressed domain based on approximate rea-
soning. International Journal of Approximate Reason-
ing, 51(1):99–114.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptative back-
ground mixture models for a real-time tracking. In
IEEE International Conference on Computer Vision
and Pattern Recognition (CVPR), volume 2, pages
246–252.
Tuzel, O., Porikli, F., and Meer, P. (2005). A bayesian ap-
proach to background modeling. In Conference on
Computer Vision and Pattern Recognition (CVPR).
Wiegand, T., Sullivan, G., Bjontegaard, G., and Luthra, G.
(2003). Overview of the H.264/AVC video coding
standard. IEEE Transactions on Circuits and Systems
for Video Technology, 13(7):560–576.
XiaHou, X.-J. and Gong, S.-R. (2008). Adaptive shad-
ows detection algorithm based on Gaussian mixture
model. In International Symposium on Information
Science and Engineering.
You, W., Houari Sabirin, M. S., and Munchurl, K. (2007).
Moving object tracking in H.264/AVC bitstream. In
Multimedia Content Analysis and Mining (MCAM),
volume 4577 of LNCS, pages 483–492. Springer.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In IEEE Interna-
tional Conference on Pattern Recognition (ICPR).
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
58
