
ACTIVE STEREO-MATCHING FOR ONE-SHOT DENSE
RECONSTRUCTION
Sergio Fernandez, Josep Forest and Joaquim Salvi
Institute of Informatics and Applications, University of Girona,
Av. Lluis Santalo S/N, E-17071 Girona, Spain
Keywords:
Pattern projection, Stereo matching, Dense reconstruction, 3D measuring devices, Active stereo, Computer
vision.
Abstract:
Stereo-vision in computer vision represents an important field for 3D reconstruction. Real time dense recon-
struction, however, is only achieved for high textured surfaces in passive stereo-matching. In this work an
active stereo-matching approach is proposed. A projected pattern is used to artificially increase the texture of
the measuring object, thus enabling dense reconstruction for one-shot stereo techniques. Results show that the
accuracy is similar to other active techniques, while dense reconstruction is obtained.
1 INTRODUCTION
Three dimensional reconstruction using non-contact
techniques constitutes an active topic in computer vi-
sion (Salvi et al., 2010). Among them, applications
requiring real time response have increased during
the last years due to the necessity to measure mov-
ing objects. Some techniques consists of fast cap-
turing cameras imaging a set of projected patterns of
the measuring object. However, the ability to work
in real time regardingless the motion of the object
(up to the acquisition time required by the camera)
is only achieved by one-shot techniques. Two main
one-shot approaches can be distinguished depending
on whether it is passive or active-based approach. In
passive approaches, also named as stereo, two or more
images are taken from different camera point of view,
and the 3D model of the scene is computed by means
of matching pixels in the images and capturing their
corresponding 3D depth by triangulation (Szeliski,
2010). Area-based and feature-based approaches are
proposed for the matching step (Hu and Ahuja, 1994).
The former provides a dense reconstruction at the ex-
pense of a high error rate for occluded areas or low-
textured regions, whereas the later makes use of a
feature extraction algorithm in order to provide a set
of reliable points for matching, obtaining better accu-
racy. However, the density of the reconstruction is di-
rectly related to the texture of the object (Batlle et al.,
1998). Active approaches, based on structured light
(SL), project a pattern that creates artificial texture on
the required object (Salvi et al., 1998). SL techniques
are implementd using one or more than one camera
(passive device), and one projector (active device).
Usually, the projector is modelled as an inverse of the
camera, thus being the projector-camera calibration
similar to the one used in classical stereo-vision (Fal-
cao et al., 2008). However, this approach suffers from
projector distortion, sharp changes in 3D depth and
color/albedo when a colored pattern is employed. An-
other approach uses of a pair of calibrated cameras
and a non-calibrated projector to increase the texture
and ease the feature extraction. Posteriorly, triangu-
lation is done with the two camera images by means
of a feature-based stereo matching algorithm. This
solution provides lower distortion than the projector
calibrated methods, while preserving the texture in-
dependence of active approaches.
This paper is structured as follows: section 2 pro-
vides some background on stereo-matching, section 3
details our new approach on active dense stereo-
matching. Section 4 analyses the results obtained
both quantitatively and qualitatively. Finally, sec-
tion 5 summarizes the conclusions of this work, giv-
ing some ideas for further improvements.
541
Fernandez S., Forest J. and Salvi J. (2012).
ACTIVE STEREO-MATCHING FOR ONE-SHOT DENSE RECONSTRUCTION.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 541-545
DOI: 10.5220/0003737005410545
Copyright
c
SciTePress
2 BRIEF OVERVIEW OF
STEREO-MATCHING
TECHNIQUES
Area-based stereo-matching algorithms have been
widely studied in the literature(Faugerasand Keriven,
1998) (Kanade and Okutomi, 1994) (Brown et al.,
2003). A correlation window is run accross the two
images, providing the most likely correspondence be-
tween pixels in the two images. The size of the win-
dows determines the number of pixels to consider for
the correlation step, directly related to the accuracy of
the system. However, errors arise under occluded or
poorly textured regions of the images. Moreover, high
computation time is required to perform the pixel-to-
pixel correspondences map. In the contrary, feature-
based algorithms use only relevant points in the image
that are match together to create the correspondences.
Using the so called Scale Invariant Feature Transform
(SIFT) algorithm proposed by Lowe (Lowe, 2004) the
image is transformed into a large collection of fea-
ture vectors. Key locations are defined as maxima
and minima of the difference of Gaussians (DoG) ker-
nel, applied in scale-space to a series of smoothed
and resampled images. Other feature detectors have
been proposed substituting the DoG by other feature
extraction filters. The detectors are classified in two
main groups, regarding their ability to detect corners
(SIFT, Harris) or blobs (Hessian, MSER). Invariance
to image translation, scaling, rotation and partially
invariance to illumination changes and robustness to
local geometric distortion can be achieved. Finally
SIFT descriptor is computed for every keypoint, pro-
viding dominant orientations to the localized posi-
tions in a 128 gradient length vector. This ensures that
the keypoints are more stable for matching and recog-
nition. Another algorithm, called Speeded Up Robust
Features (SURF) (Bay et al., 2008), uses a simplified
version of SIFT, obtaining slight lower accuracy re-
sults whereas the computation time is reduced. More
recently, the so called DAISY algorithm proposed by
Tola et al. (Tola et al., 2008) has been proposed, per-
forming an area-based features matching for a set of
initial point seeds. Local descriptors are used for ev-
ery pixel, replacing the classical correlation windows
with local region information. Therefore, a match-
ing can be pursued pixel by pixel for all positions in
the window patch, based on their DAISY descriptors.
The descriptor are based on Gaussian filters, giving
more importance regarding the distance of the anal-
ysed pixel to the initial seed. This algorithm pre-
vents from the errors that occurs in the classical area-
based method for low textured images. However, the
computation time results drastically increased as not
a pixel but a vector must be compared for every posi-
tion in the image.
3 A NOVEL PROPOSAL ON
ACTIVE STEREO-MATCHING
The proposed technique employs a pair of calibrated
cameras and a non calibrated projector. The projector
is used to project a previously designed pattern onto
the surface to reconstruct, so as to increase the texture
provided by the surface. The textured surface is then
captured by both cameras, and a feature-based match-
ing algorithm is applied. Thanks to the rich texture
present in the images, a dense 3D reconstruction of
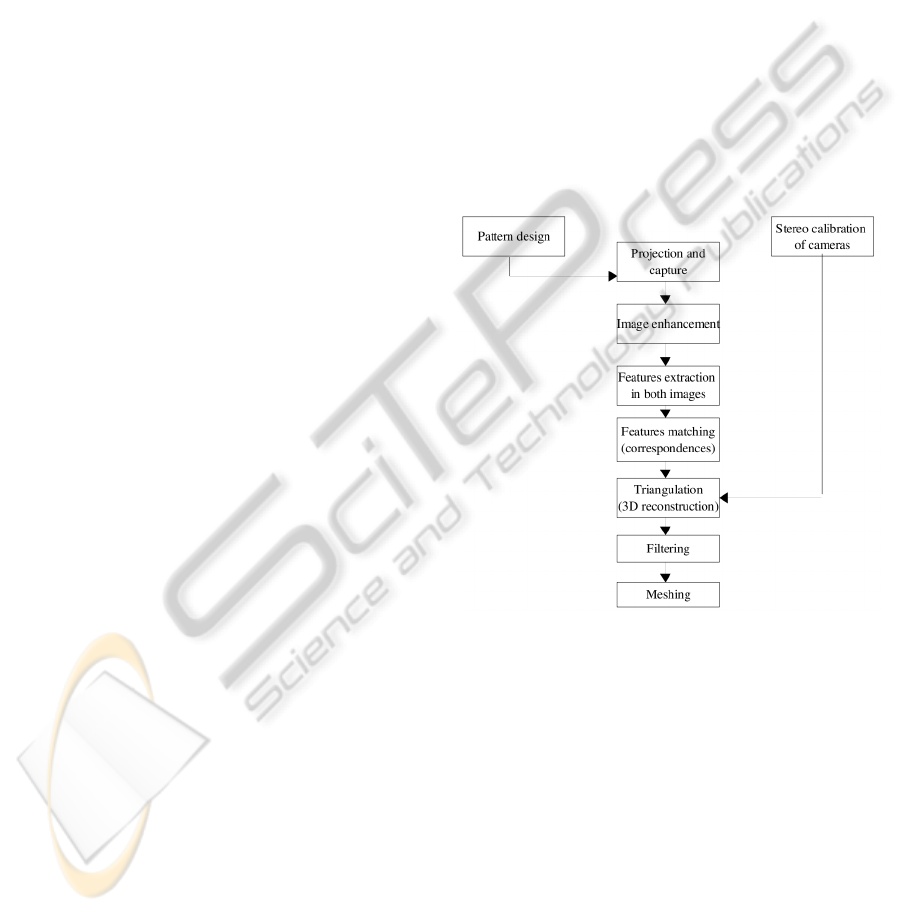
the scene can be obtained. The flow diagram of the
proposed method is shown in Fig. 1:
Figure 1: Flow diagram of the proposed algorithm.
3.1 Pattern Design
The design of an optimal pattern for increasing the
texture in stereo-vision has been previously studied
in the literature. For instance, Tehrani et al. (Tehrani
et al., 2008), proposeda trinocular system with a color
slit based pattern that maximizes the distance in the
Hue channel between adjacent slits. However, it is
reasonable to employ both coding axis in order to in-
crease the features in the recovered images. This is
the case of M-arrays, like the ones proposed by Griffin
et al. (Griffin et al., 1992) and Morano et al. (Morano
et al., 1998). Moreover, it is important to consider
the need to minimize the error against changes in
color and albedo. This leads to a maximization of
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
542

the hamming distance between adjacent areas. In or-
der to submit these requirements, we proposed a zero
mean greyscale squared random pattern, as can be ob-
served in Fig. 2. The size of the squares must be set as
the minimum of the joint resolution of the projector-
camera system, so as to obtain dense reconstruction.
In our case this corresponds to 4 pixels per square,
as the density of the reconstruction is limited by the
resolution of the camera.
Figure 2: Random squared greyscale pattern proposed for
projection.
3.2 Stereo Camera Calibration
Cameras calibration has been performed using an
adapted version of the stereo-calibration Matlab tool-
box provided by DeBouguet (Bouguet, 2004). The
cameras are calibrated using a checkerboard pattern,
capturing different positions and angles (from 15 up
to 20 images were employed). It is important to men-
tion that both radial and tangential distortion of both
cameras were considered for calibration. For more
information about this algorithm see the work of De-
Bouguet (Bouguet, 2004).
3.3 Projection and Capture
The projector is placed between the two cameras, so
as to have the most similar projection pattern seen
from the cameras and avoid effects caused by defo-
cusing. The cameras (which must have identical char-
acteristics) capture the same artificially textured scene
seen from two different points of view, in a one-shot
image.
3.4 Image Enhancement
An algorithm to increase the constrast between adja-
cent pixels is applied to the captured images. This
reduces the effect of different albedo and different il-
lumination. To this end, a DC subtraction algorithm
followed by an local histogram equalization is pur-
sued. This provides good filtering results at a very
low computational cost.
3.5 Features Extraction
In this work, the feature-based approach is combined
with the artificially textured images. Therefore dense
matching can be achieved while preserving a low er-
ror rate as no textureless areas are presented. The
proposed technique was implemented with a combi-
nation of Harris corners detector and MSER blobs
detector. SIFT algorithm was selected to create the
vector descriptors.
3.6 Features Matching
The algorithm used to find correspondences is based
on the similarity between two descriptors correspond-
ing to the same textured feature in the object shape.
That is, two descriptors coming from the 2D images
correspond to the same 3D point if their module and
orientations are similar. This similarity is measured
based on the Euclidean distance of their feature vec-
tors.
3.7 Triangulation
Every pair of (x,y) coordinates given by the match-
ing step are for the triangulation, using the extrinsic
and extrinsic parameters of the cameras provided by
the calibration step. The algorithm returns a point in
3D space corresponding to the 2D projections in im-
age planes provided as input. The output is a cloud of
points in (x,y,z) representing the shape of the recon-
structed object.
3.8 Filtering
A post-triangulation filtering step reveals necessary
due to some erroneous matchings that originate out-
liers in the 3D cloud of points. Three different filter-
ing steps are applied regarding the constraints given
by epipolar geometry, the statistical 3D positions and
the bilateral-based filter.
Epipolar Geometry based Filtering: according to
the epipolar geometry, all pixel in the left image cre-
ate an epipolar line in the right image (Faugeras and
Toscani, 1986). The actual corresponding pixel in the
right image should pass through this line, or remain
closer than a given tolerance value. If the pixel lies
too far from its corresponding epipolar line the cor-
respondence is considered as wrong, and the pair of
pixels is discarded.
3D Statistical Filtering: in the 3D space, the out-
liers are characterised by their extremely different 3D
coordinates regarding the surrounding points. There-
fore, pixels having a 3D coordinates different than the
ACTIVE STEREO-MATCHING FOR ONE-SHOT DENSE RECONSTRUCTION
543
95% of points distribution are considered for suppres-
sion. This is done in two steps for all the points in
the 3D cloud. First the distance to the centroid of the
cloud of points is computed, for every pixel. After-
wards, those pixels having a distance to the centroid
greater than two times the standard deviation of the
cloud of points are considered as outliers.
Bilateral Filtering: an extension to 3D data of
the 2D bilateral filter proposed by Tomati and Man-
duchi (Tomasi and Manduchi, 1998) was imple-
mented. The algorithm smoothes the 3D cloud of
points up to a given value, while the discontinuities
are preserved. As result, the variance due to little
misalignment in the matching process is reduced, de-
creasing the error in the reconstructed surface.
3.9 Meshing
Finally, a meshing step is applied to obtain a surface
from the 3D cloud of points. To do so, a bidimen-
sional Delaunay meshing algorithm is applied on co-
ordinates (x,y).
4 EXPERIMENTAL RESULTS
The proposed algorithm has been tested under real
conditions. To this end, a pair of cameras Canon
EOS50D 10Mpixels have been employed. The pro-
jector is a Epson EMP400W 768x1024 resolution.
4.1 Quantitative Results
In order to evaluate the system in terms of accuracy, a
flat plane has been reconstructed using the proposed
algorithm, at a distance of 50cm. At this point, it
is important to remark that other stereo dense recon-
struction algorithms are texture dependent in terms of
accuracy. Therefore, the comparison has been done
with other active techniques, which do not depend
on the texture of the given surfaces. The proposed
technique has been compared with a one-shot tech-
nique (proposed by Monks et al. (Monks et al., 1992))
providing sparse reconstruction, and with a time-
multiplexing technique (Guhring (G¨uhring, 2001))
which provides dense recontruction for static scenar-
ios. Principle Component Analysis (PCA) was ap-
plied to obtain the equation of the 3D plane for ev-
ery technique and for every reconstruction. This tech-
nique is used to span the 3D cloud of points onto a 2D
plane defined by the two eigenvectors corresponding
to the two largest eigenvalues. The results of mean
error and standard deviation of the 3D cloud of points
with respect to the reconstructed plane are shown in
table 1.
Table 1: Results for a flat plane (proposed calibration tech-
nique; Average deviation of the reconstructing error; Stan-
dard deviation of the reconstructing error).
Technique Average (mm) Stdev (mm)
Monks et al. 1.21 1.20
Guhring 3.96 2.46
Active stereo 1.30 0.75
As can be observed, the proposed technique per-
forms better in terms of standard deviation than the
other active techniques, as the same time dense re-
construction is provided regardingless the texture of
the plane.
4.2 Qualitative Results
The algorithm has been tested with a real object, as
can be observed in Fig. 3. The 3D shape was recon-
structed optimally, obtaining high density in the 3D
cloud of points. The little holes at the base of the
object correspond to the suboptimal projection of the
pattern, which leads to blured regions that are filtered
out after the 3D reconstruction. Nevertheless, dense
reconstruction is achieved for optimal projection of
the pattern onto the object.
5 CONCLUSIONS
In this work an active feature-based stereo-matching
algorithm is proposed. The projected random pattern
provides artificial textured images not depending on
the nature of the scene. The selected black and white
pattern maximises the hamming distance between ad-
jacent points. The features extraction and matching
was pursued using Harris and MSER detector, and
SIFT descriptors. Posteriorly, a filtering algorithm
based on three different approaches was implemented
after triangulation in order to suppress outliers, thus
giving reliable results at the expense of loosing some
density of reconstruction in occluded or blured areas
of the object. The quantitative results show the good
performance of the proposed system in terms of accu-
racy of the reconstructed cloud of points. Moreover,
qualitativeresults show the performanceof the system
under real shaped objects and normal light conditions.
The use of a trinocular, where the projector is cali-
brated with respect to the cameras, is considered for
future work. This, jointly with the use of structured
light, constrains the matching process providing more
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
544
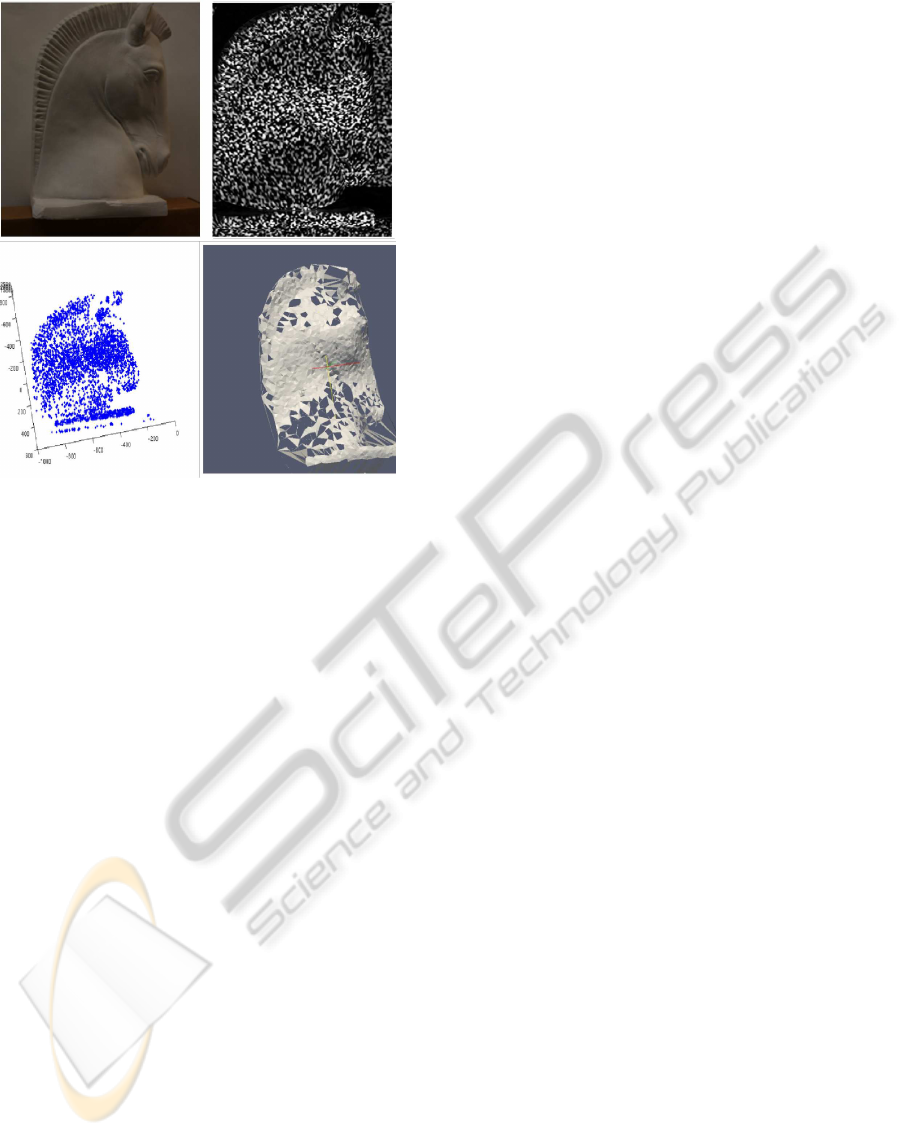
Figure 3: Reconstruction of a ceramic horse of dimensions
20x30cm. The figures are: original surface. Captured im-
aged after pattern projection. Filtered 3D cloud of points.
Mesh.
accurate results. However, the complexity of finding
correspondences and performing the triangulation of
the extracted features in the images increases by a fac-
tor of three, providing much higher computation time.
ACKNOWLEDGEMENTS
This work is supported by the FP7-ICT-2011-7
project PANDORA: Persistent Autonomy through
Learning, Adaptation, Observation and Re-planning
funded by the European Commission and the
project RAIMON: Autonomous Underwater Robot
for Marine Fish Farms Inspection and Monitoring
(CTM2011-29691-C02-02). S. Fernandez is sup-
ported by the Spanish government scholarship FPU.
REFERENCES
Batlle, J., Mouaddib, E., and Salvi, J. (1998). Recent
progress in coded structured light as a technique to
solve the correspondence problem: a survey. Pattern
Recognition, 31(7):963–982.
Bay, H., Tuytelaars, T., and Van Gool, L. (2008). Surf:
speeded-up robust features. In 9th European Con-
ference on Computer vision, volume 110, pages 346–
359.
Bouguet, J. (2004). Camera calibration toolbox for matlab.
Brown, M., Burschka, D., and Hager, G. (2003). Advances
in computational stereo. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, pages 993–
1008.
Falcao, G., Hurtos, T., and Massich, J. (2008). Plane-based
calibration of a projector camera system. VIBOT mas-
ter, pages 1–12.
Faugeras, O. and Keriven, R. (1998). Complete dense
stereovision using level set methods. Computer Vi-
sionECCV’98, pages 379–393.
Faugeras, O. and Toscani, G. (1986). The calibration prob-
lem for stereo. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition,
volume 86, pages 15–20.
Griffin, P., Narasimhan, L., and Yee, S. (1992). Genera-
tion of uniquely encoded light patterns for range data
acquisition. Pattern Recognition, 25(6):609–616.
G¨uhring, J. (2001). Dense 3-D surface acquisition by struc-
tured light using off-the-shelf components. Videomet-
rics and Optical Methods for 3D Shape Measurement,
4309:220–231.
Hu, X. and Ahuja, N. (1994). Matching point features with
ordered geometric, rigidity, and disparity constraints.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, pages 1041–1049.
Kanade, T. and Okutomi, M. (1994). A stereo matching
algorithm with an adaptive window: Theory and ex-
periment. IEEE Transactions on Pattern Analysis and
Machine Intelligence, pages 920–932.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Monks, T., Carter, J., and Shadle, C. (1992). Colour-
encoded structured light for digitisation of real-time
3D data. In Proceedings of the IEE 4th International
Conference on Image Processing, pages 327–30.
Morano, R., Ozturk, C., Conn, R., Dubin, S., Zietz, S., and
Nissano, J. (1998). Structured light using pseudoran-
dom codes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 20(3):322–327.
Salvi, J., Batlle, J., and Mouaddib, E. (1998). A robust-
coded pattern projection for dynamic 3d scene mea-
surement. Pattern Recognition Letters, 19(11):1055–
1065.
Salvi, J., Fernandez, S., Pribanic, T., and Llado, X. (2010).
A state of the art in structured light patterns for surface
profilometry. Pattern recognition, 43(8):2666–2680.
Szeliski, R. (2010). Computer vision: Algorithms and ap-
plications. Springer-Verlag New York Inc.
Tehrani, M., Saghaeian, A., and Mohajerani, O. (2008).
A New Approach to 3D Modeling Using Structured
Light Pattern. In Information and Communication
Technologies: From Theory to Applications, 2008.
ICTTA 2008., pages 1–5.
Tola, E., Lepetit, V., and Fua, P. (2008). A fast local descrip-
tor for dense matching. In Proc. CVPR, volume 2.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In Computer Vision, 1998.
Sixth International Conference on, pages 839–846.
IEEE.
ACTIVE STEREO-MATCHING FOR ONE-SHOT DENSE RECONSTRUCTION
545
