
NETWORK PLANNING TOOL WITH TRAFFIC-ADAPTIVE
PROCESSING FOR WIRELESS SENSOR NETWORKS
José Cecílio and Pedro Furtado
University of Coimbra, Coimbra, Portugal
Keywords: WSN, Network Planning, Measurement, Performance, Reliability.
Abstract: Some applications of Wireless sensor networks (WSNs), especially in industrial sense and react scenarios,
require fairly fast sampling rates. Considering that a few sensors may share a common sink, sharing part of
their path on the way to the sink may result in undesirable message losses and delays that cannot be solved
without modifying data communication rates. Our research focuses on planning a WSN to avoid excess
traffic during sensing and acting to guarantee the minimal delay for critical scenarios. In this paper we
propose an integrated approach to plan, test and reconfigure a network. Initially, our approach gives
guidance for a base-plan for the network. With this first-cut plan we test the performance of the network and
if necessary reconfigure it. The results of tests given are followed by traffic-level adjustments of the system
by several possible techniques: adjustment of number of nodes, network partitions, reduction of the
sampling rate or in-network processing with strategies such as aggregation techniques or in-node closed
control loops. We evaluate experimentally the proposed approach with two different mechanisms of
communication, and different levels of traffic, showing that our planning and reconfiguration allows users
to make the best choices for the application context.
1 INTRODUCTION
When deployed in an industrial setting for
monitoring-and-control applications, latencies and
message losses can become paramount, as some
industrial applications need high sampling rates and
may apply closed loop control. Then the question
arises as whether one can provide guarantees to
urgent message delivery. One way to try to provide
added guarantees is to deploy a WSN network with
real-time specific algorithms that would include at
least completely pre-planned synchronous time-
division mechanisms. There is extensive research
into synchronous time-division protocols for WSN.
Among all the work, protocols based on time
division multiple access (TDMA) attract much
attention, since TDMA inherently avoids collisions,
the primary factors causing message loss. TDMA-
based protocols are very efficient when network link
traffic is kept below a certain level, resulting in
neglectable packet losses, where the whole system
will guarantee delivery for messages. However,
CSMA-based protocols are more flexible for
dynamic networks, where data traffic generated at
each node can change over time.
One issue to deal with is how to keep network
traffic below a certain limit, in order to guarantee
minimal losses and delays. We start by defining a
simple network planning approach assuming a
planned deployment of nodes. Then we provide a
tool for users to test the deployment concerning
metrics such as packet and message losses and
latencies. If the test results in non-conformance to
user-dictated application requirements, there is a
need to modify some parameter(s) and to re-test the
solution until it conforms to requirements. Perhaps it
is absolutely necessary to decrease the sensing rate,
remove nodes from the network (or to create
network partitions), or perhaps the sending rate, if
some extra delay can be tolerated.
The proposed approach consists on creating a
planned network by taking into account a set of
constraints. The approach includes: a Network
Planning algorithm to deal with high-rate sampling;
a Network Status module offering simple network
status tests that provide information to the user, such
as the message loss ratio, delays and the degree of
difficulty in delivering application-level messages; a
module that provides commanding / reconfiguring
the WSN to adjust the system until the network
59
Cecílio J. and Furtado P..
NETWORK PLANNING TOOL WITH TRAFFIC-ADAPTIVE PROCESSING FOR WIRELESS SENSOR NETWORKS.
DOI: 10.5220/0003815600590064
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 59-64
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

status tests are satisfied.
The rest of the paper is organized as follows:
section 2 discusses related work; section 3 presents
the tool for planning, reconfiguring and evaluating
the network performance; section 4 shows the
experimental results obtained for TDMA (schedule-
based) and X-MAC (contention-based) protocols
and section 5 concludes the paper.
2 RELATED WORK
In this section we first review related work on MAC
protocols and its adaptation, planning and
monitorization. One important key issue in WSNs
that influences whether the deployed system will be
able to save battery power or to handle high
sampling rates gracefully is the MAC protocol and
its configurations. WSN MAC protocols can be
classified into two main families or their
combination: Carrier Sense Multiple Access
(CSMA), and Time Division Multiple Access
(TDMA). TDMA protocols will schedule the
activity of the network in a period in which all nodes
will be active. In the idle times between data
gathering sessions, nodes can turn off the radio
interface and lie in a sleep state. Thus, the main and
most important advantage of TDMA is time critical
and low power consumption. There are innumerous
works addressing TDMA protocols. Several
protocols have been designed for quick
broadcast/convergecast, others for generic
communication patterns. The greatest challenges are
the spatial-reuse of the time-slots, interference
avoidance, low-latencies, and energy-efficiency.
SS-TDMA (Kulkarni) is a TDMA protocol
designed for broadcast/convergecast in grid WSNs.
The slot allocation process tries to achieve cascading
slot assignments. Each node receives messages from
the neighbours with their assigned slots.
In RT-Link [Rowe] and PEDAMACS (Ergen)
protocols, time-slot assignment is accomplished in a
centralized way at the gateway node, based on the
global topology in the form of neighbour lists
provided by the WSN nodes.
CSMA protocols may be suited for event-driven
WSN applications with dynamic topologies. Some
protocols such as S-MAC, B-MAC, WiseMAC and
X-MAC are frequently used in WSN. S-MAC (Ye)
defines periodic frame structure divided into two
parts, with nodes being active in the first fraction of
the frame and asleep for the remaining duration. The
length of each of the frame parts is fixed according
to the desired duty-cycle.
B-MAC (Polastre) and WiseMAC (El-Hoiydi)
are based on Low-Power Listening (LPL) (Polastre)
that is a very simple mechanism designed to
minimize the energy spent in idle listening. X-MAC
(Buettner) also is based on Low-Power Listening but
reduces the overhead of receiving long preambles by
using short and strobed preambles allowing
unintended receivers to sleep after receiving only
one short preamble and the intended receiver to
interrupt the long preamble by sending an ACK
packet after receiving only one strobed preamble.
Monitorization tools can be used to evaluate
network performance. It is necessary to have
information on the fraction of packets and
application messages losses, latencies and other
simple metrics that provide enough information
about the network health. It is also necessary to have
alternative in-network processing approaches.
We have reviewed existing tools to monitor
network health (SNMS, SNIF, DiMo), and designed
our own simplified tool adapted to our planning
objectives. Our current tool does not include some
important parts that the reviewed tools do include
and which we plan to add later, such as node failure
detection mechanisms.
To avoid congestion, our work uses in-network
data processing. Data processing in sensor networks
has been studied extensively, and in-network
processing is the general term used for techniques
that process data on a node or group of nodes before
forwarding it to the user.
Our study is related to these ones in that in-
network data processing approaches are used to
decrease the amount of communication that is
needed. But in our work these approaches are part of
an integrated system, with guaranteed delivery of
messages with minimal loss, and monitorization and
configuration to reduce network traffic to acceptable
levels.
3 NETWORK PLANNING
In this section we devise the basic network planning
approach, considering schedule-based with a fixed
topology and simple slot-based planning. We also
discuss why this approach can also be a basis for a
first-cut plan on contention-based protocols,
although more testing is required in that case to
determine whether the system will behave gracefully
with strict sampling rates.
SENSORNETS 2012 - International Conference on Sensor Networks
60
3.1 Planning for Schedule-based
Protocols
TDMA protocols create a schedule for network
activity: each node is assigned at least one slot in a
time frame, which is considered to be the number of
slots required to get a packet from each source to the
sink. In this work we consider a simple protocol
with a global network frame where all nodes have
the same length in the frame. The time axis is
divided into fixed-length base units called epochs.
Each epoch is subdivided into k.n time slots, where k
is the number of slots required for successful
transmitting a message and n is the number of nodes
in the network. There are various techniques to
determine the value of k depending on application
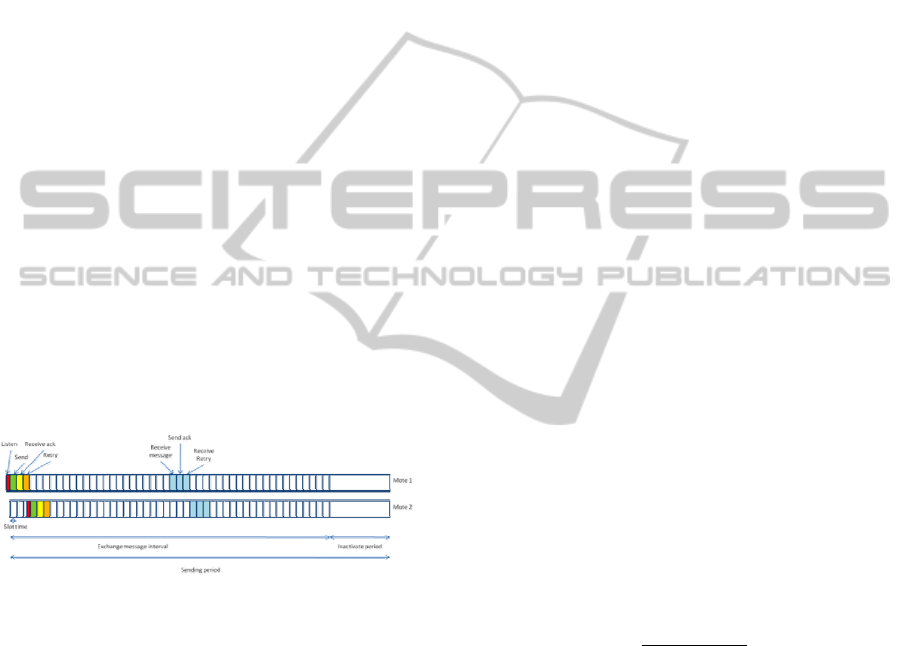
requirements. We used k=3 slots to provide added
guarantee for delivery of messages. The first slot is
used to send a message, the second is reserved to
receive an acknowledgment from receiver and the
last slot is used to retransmit a message if the node
doesn’t receive an ack. The slot assignment of each
node can be pre-configured, as a planned
deployment is assumed. Each node is identified by a
unique identification number i and can only transmit
any message on the assigned ki slot. Figure 1
displays an example for two nodes (mote 1 and 2) in
a star topology.
Figure 1: Slot usage for Mote 1 and 2.
One important issue on planning a deployment to
use a TDMA protocol is related with the time slot.
The slot size should be as small as possible to reduce
the epoch size and consequently the end-to-end
delay.
To determine the slot time, we take into account
the following times:
Time to transfer a message from the MAC layers
data FIFO buffer to buffer of radio transceiver (t
ts
);
Time to transmit a message (t
xm
);
Time a receiver needs to process the message
and initiate the transmission of an acknowledgment
message (t
pm
);
Time to transmit an acknowledgment (t
xa
);
Time to transfer and process the
acknowledgment from the radio transceiver and to
perform the associated actions for received/missed
acknowledgment (t
pa
).
Also, a small guardian time is required at the
beginning and end of each slot to compensate for
clock drifts between nodes (t
g
). Thus, the minimum
size of a transmission slot is given as:
g
t
pa
t
xa
t
pm
t
xm
t
ts
t
g
t
st
T ),(),(max
(1)
The information content of messages and sampling
rate should be planned as soon as epoch and slot
assignments are known.
The epoch size (including a built-in inactivity
period) defines the minimum delay of messages, and
a maximum packet size defines the maximum
information length of a single message.
Based on a set of network constraints that can be
defined by the user, it is possible to determine
adequate values for parameters such as network size
or minimum delay, depending on which variable is
to be determined.
Minimum Sending Period: The minimum
sending period is the minimum time between two
messages are sent by a node and it depends on the
network size (n), the slot time (
time
slot
) and the
number of slots reserved for each node (k):
n
Node
t
Period
sending min
(2)
Where
Node
t
represents the time needed by each
node and it is given by:
timeNode
slotkt
.
The maximum sending rate is the inverse of this
value. Likewise, the maximum network size is the
maximum size of the network measured in number
of nodes. Given a sending rate, this value is
determined as a function of the minimum sending
period:
kslot
iodsendingPer
n
time
Max
(3)
The maximum delay measures is the time taken
from the moment when a sample is collected to the
moment when it is delivered to the client. This
measure includes the time it takes for a sample to
wait for the next sending instant.
ceiveTimeonTimeTransmissi
Size
Epoch
Delay
Re
max
(4)
Where epoch size is the time needed to do complete
a cycle in schedule time line. It is defined by:
TimeinactivityslotknEpoch
TimeSize
(5)
NETWORK PLANNING TOOL WITH TRAFFIC-ADAPTIVE PROCESSING FOR WIRELESS SENSOR NETWORKS
61

We can also estimate the closed-loop maximum
delay. The closed-loop maximum delay measures
the amount of time from the instant when a sample
is collected to the moment an actuation is enacted
that already carries a response to the sampled value.
The closed loop control can be applied on motes or
in client workstation, depending where it is applied,
we can define the maximum delay as:
Client
Closedloop
nTimeComputatioDelayw
nTimeComputatio
D
max2
max
(6)
Where w indicates the place where closed loop
control is applied. This variable is a binary variable.
If w=0, closed loop control is applied on mote,
otherwise closed loop control is applied on client
workstation.
Other parameter that can be estimated is the
radio duty cycle of each node. It is measured as:
Size
Time
Dutycyle
Epoch
Slotk
Radio
[%]
(7)
The above planning is a simple way to plan a flat
wireless sensor network. If we are interested to plan
a tree network with several levels each epoch should
be subdivided into
Levels lLevel
Nodes
N
l
n
i
lidescendent
knk
11
,
(8)
time slots. Where:
Levels
N
is the number of levels used by the
topology.
jLevel
Nodes
n
is the number of nodes that exists in
level j.
jidescendent
n
,
is the number of nodes below level j
connected to node i.
k
is the number of slots required by each node.
In this case, the minimum sending period is given
by:
Levels lLevel
Nodes
N
l
n
i
Node
lidescendent
Node
Size
tnt
EpochiodsendingPer
11
,
minmin
(9)
3.2 Planning for Contention-based
Protocols
While planning for schedule-based protocols can be
based on deterministic formulas, contention-based
protocols have to deal with probabilistic collisions
and other network factors. In this work we consider
the X-MAC as an example of contention-based
protocol, and apply a planned topology similar to the
one present in the previous section. X-MAC uses a
strobe preamble that consists of a sequence of short
preambles prior to DATA transmission, as illustrated
in figure 3.
These short preambles indicate that a node has
data to transmit. Assuming a star topology and that
the sink is always active, when a receiver receives a
strobe, it sends an acknowledgment to the sender
which indicates that the transmission can start.
When the sender receives this ack, it stops to send
strobes and starts transmitting the message
immediately.
Figure 2: Operation of X-MAC.
After transmission concludes, the sender goes to
sleep until it has new messages to send or until the
next listen period. This listen period is used to check
if another node (the sink) wants to send messages to
the node. In our prototype we limit the X-MAC
period to the same slot time used on schedule-base
protocol. Since the sink is always on, we assume that
when a node wishes to communicate to send values,
it only needs to send a small strobe and gets an ack
back immediately from the sink (single hop and sink
always with power). As a first-cut approximation,
our planning assumes no collisions (best-case
scenario). With this scenario, exactly the same slot-
based logic used in schedule-based planning is
assumed. We assume that each node will transmit in
a slot, sending a small probe, getting ack, sending
the data packet, getting an ack and possible sending
retry. This planning will result in the following
timings:
Time to transmit a strobe (
xs
t
);
Time to receive and process a strobe (
rs
t
);
Time to transmit an acknowledgment (
xa
t
);
Time to transmit a message (
xm
t
);
SENSORNETS 2012 - International Conference on Sensor Networks
62

Time a receiver to process the message and
initiate the transmission of an acknowledgment
message (
pm
t
);
Time to transmit an acknowledgment (
xam
t
);
Time to perform the associated actions for
received/missed acknowledgment (
pa
t
).
Thus, the minimum time per node is given as:
paxampmxmxarsxsnode
tttttttT
(10)
The above plan is assuming no collisions, which is
an acceptable assumption when there is little
congestion in the medium. If the collision
probability is significant, due to high sampling rates,
the planned slot time per node should be multiplied
by a factor α, where α is a percentage of slot time
increase that accommodates backoff periods due to
collisions. For instance, if each node takes 21ms,
this is multiplied by 1.04 to assume an average 4%
increase in total slot time.
To determine the percentage of increase we
consider the probability of any node transmitting in
the same slot time as another node. We use the
following expression to determine that:
T
t
n
T
t
1
(11)
Where t is the total time reserved for each node, n is
the number of node and T is a Period (sending
period).
For example, if each node occupies 10% of the
period, and there are 10 nodes, the overhead increase
will be 9%. So we assume a basic slot-like plan and
we add 9% to the period to better account for
collisions.
For contention-based protocols also it is possible
to determine adequate values for parameters such as:
The maximum delay
ceiveTimeonTimeTransmissi
backoffStrobeDelay
TimeTime
Re
max
(12)
Where
Time
Strobe
is the time needed to receive an
ack from receiver and
Time
backoff
is the time needed
to start the transmission of the message.
The closed-loop maximum delay can also be
estimated by (6) where Delay is given by expression
(12).
3.3 Assessing and Reconfiguration
Network planning determines a fist-cut layout of the
network. After network planning and tests,
reconfiguration may be necessary to improve the
performance of the system. The user can change
configuration parameters until the desired
characteristics are obtained. In order to do this, the
reconfiguration requires a set of configurations that
should be used in the successive test procedure, until
the desired characteristics are obtained.
The reconfiguration module collects information
provided by network status, considering metrics
such as message loss ratio, delays, number of fail
ack and battery consumption. If any metrics fail to
provide desired guarantees it is necessary to
reconfigure the system. The reconfiguration module
allows changing the number of nodes and network
partitions, decouple the sending rate from the
sampling rate and join few reading into same packet
or perform aggregations (Summarize information).
4 EXPERIMENTAL
EVALUATION
In this section we report the evaluation of our
approach using schedule and contention based
protocols. The objective is threefold: to test network
planning, to characterize and compare alternative
protocols and configurations under different traffic
conditions; to show that excessive traffic intensity is
promptly characterized by the tests and test
reconfiguration works.
In our approaches we are interesting to give a
tool for planning a network to lead with high rate
and give guarantees of alarm detection. With the tool
we can plan a network with schedule-based and
contention-based protocols.
In tests we used a slot time equal to 7ms,
corresponding to 21 ms of the period reserved to a
single node. Assuming the sampling rate and
sending rate are the same, if a node needs 21ms, and
we deploy a network with 32 nodes, we conclude
through eq.(3) that the minimal guaranteed delay is
672 ms and the minimal period is equal to that too.
In figure 3 we show the message loss ratio
obtained during the tests of our network planning
tool. The results were obtained for contention-based
and schedule-based protocols with different
sampling rates.
Message loss ratio is one of our key measures
that is used as an indicator of excess traffic
conditions. In figure 3 we observe high message loss
ratio for high traffic rate (sampling rate below 800
ms). During the plan, our tool gives 672ms as
minimum sampling rate. When we can verify
through the figure 3, our planning is correct, because
NETWORK PLANNING TOOL WITH TRAFFIC-ADAPTIVE PROCESSING FOR WIRELESS SENSOR NETWORKS
63

if we used sampling rates less than minimum, many
messages are lost. Therefore if we consider a
sampling rate greeter than 672ms, who corresponds
to a one reading per slot time period, all messages
are successful delivery.
Figure 3: Message loss ratio with X-MAC and TDMA
protocols.
When we use a contention-based protocol (X-
MAC), the minimum sampling rate obtained to
schedule-based protocol is insufficient to guarantee
minimal losses. In our planning tool we added a
tolerant factor (more 25% of needed time) to prevent
collisions. In figure 3 we can also verify that is
factor is important when we lead with high rate. For
low sampling rates, X-MAC protocol have little
losses with good performance, but TDMA is better
with losses equal zero.
Based on these results and in the planning if a
user wants to increase the sampling rate to 500ms,
he has to create partitions on the network or reduce
the number of nodes using a single network only.
Applying the planning tool is obtained for a
schedule-based protocol 18 motes as limit. Who is
needed a tolerant factor for contention-based
protocol the limit is less.
Figure 4: Evaluation of message loss ratio versus number
of nodes.
Figure 4 shows the influence of adding nodes in
the network performance. The test was run with 500
ms of sampling rate. The test starts with a single
mote and after 15 minutes we add more one node
and store the influence of then in the message loss
ratio.
The results show an increase in the message loss
with the increase in the number of active motes.
When the number of nodes is less than 18 (number
given by eq.(4)), the message loss is zero for
schedule-based protocols, but for contention-based
protocols is closed zero until get 16 motes. If the
number of nodes is greater the message loss increase
significantly. When the number of nodes is greater
than 22, the message loss becomes critical (higher
than 5%).
5 CONCLUSIONS
In order to make WSNs more reliable in practical
contexts with constraints such as high sense and
control rates, there is a need for approaches to help a
user to correctly plan a WSN. Sensor networks tend
to have congestion problems at high sampling rates,
which may endanger the timely delivery of
messages. In this paper we have proposed a tool to
plan and test a WSN. Our approach allows to
configure the network traffic (taking into
consideration application requirements such as
sampling rate, maximum delivery delay and whether
the data should be detailed or can be summarized)
and measure their performance.
We proposed a module to plan, configure and
reconfigure the network. Our experimental results
study the traffic characteristics of the approaches
under different conditions, and to conclude on their
usefulness.
REFERENCES
Kulkarni, S. S. and Arumugam, M., “SS-TDMA: A Self-
Stabilizing MAC for Sensor Networks”, Sensor
Network Operations, IEEE Press (2005).
Rowe, A., Mangharam, R., Rajkumar, R. Rajkumar, “RT-
Link: A Global Time-Synchronized Link Protocol for
Sensor Networks”, Elsevier Ad hoc Networks, Special
Issue on Energy Efficient Design in Wireless Ad Hoc
and Sensor Networks, 2007.
Ergen, S. C. and Varaiya, P., "PEDAMACS: Power
Efficient and Delay Aware Medium Access Protocol
for Sensor Networks," IEEE Trans. Mobile Comput.,
vol. 6, July 2006.
Polastre, J., Hill, J., Culler, D., “Versatile low power
media access for Wireless Sensor Networks”, in ACM
SenSys, 2004.
Buettner, M., Yee, G. V., Anderson, E. and Han, R., “X-
mac: A short preamble mac protocol for duty-cycled
wireless sensor networks”, in ACM Sensys, 2006.
SENSORNETS 2012 - International Conference on Sensor Networks
64
