
A FORWARD-BACKWARD ALGORITHM FOR STOCHASTIC
CONTROL PROBLEMS
Using the Stochastic Maximum Principle as an Alternative to Dynamic
Programming
Stephan E. Ludwig
1
, Justin A. Sirignano
2
, Ruojun Huang
3
and George Papanicolaou
4
1
Department of Mathematics, Heidelberg University, INF 288, Heidelberg, Germany
2
Department of Management Science and Engineering, Stanford University, Stanford, U.S.A.
3
Department of Statistics, Stanford University, Stanford, U.S.A.
4
Department of Mathematics, Stanford University, 380 Sloan Hall, Stanford, U.S.A.
Keywords:
Optimal stochastic control, Stochastic maximum principle, Forward-Backward stochastic differential equa-
tions.
Abstract:
An algorithm for solving continuous-time stochastic optimal control problems is presented. The numeri-
cal scheme is based on the stochastic maximum principle (SMP) as an alternative to the widely studied dy-
namic programming principle (DDP). By using the SMP, (Peng, 1990) obtained a system of coupled forward-
backward stochastic differential equations (FBSDE) with an external optimality condition. We extend the
numerical scheme of (Delarue and Menozzi, 2006) by a Newton-Raphson method to solve the FBSDE system
and the optimality condition simultaneously. As far as the authors are aware, this is the first fully explicit
numerical scheme for the solution of optimal control problems through the solution of the corresponding
extended FBSDE system. We discuss possible numerical advantages to the DDP approach and consider an
optimal investment-consumption problem as an example.
1 INTRODUCTION
We consider continuous-time stochastic control prob-
lems where the state variable is a controlled stochastic
process of Markovian type and the objective function
depends on the state and on the control. These type
of problems typically appear in mathematical finance
and economics. The most common method to solve
these problems is the dynamic programming princi-
ple (DPP), which leads to the well-known Hamilton-
Jacobi-Bellman (HJB) equation. Various numerical
schemes take advantage of the DDP’s discrete version
by performing a backward algorithms or directly solv-
ing the HJB partial differential equation using a finite
difference scheme.
In this paper, we consider an alternative approach
to the problem based on the stochastic maximum
principle (SMP), which leads to a system of cou-
pled forward-backward stochastic differential equa-
tions (FBSDE) plus an external optimality condition.
This was first studied by (Peng, 1990). It is well
known that a quasilinear PDE has a FBSDE repre-
sentation, which is an extension of the well-known
Feynman-Kac formula. However, the FBSDE repre-
sentation cannot be directly applied to the HJB equa-
tion unless the optimal control is known as an explicit
function. Instead, by using the SMP, we obtain a cou-
pled FBSDE system for the adjoint equations. The
coupling arises through the additional optimality con-
dition only.
In addition to reviewing briefly the connection be-
tween stochastic control problems and FBSDE sys-
tems, the main objective of this paper is to present a
complete numerical algorithm by obtaining approx-
imate solutions to a certain class of optimal control
problems. We need to use advanced numerical meth-
ods for the FBSDE because of the coupling which
arises from dependence of the state process on the
controls and is therefore connected to the controlled
objective function. Therefore, we take advantage of
an existing numerical scheme for coupled FBSDEs,
initially proposed by (Delarue and Menozzi, 2006)
and extend it to satisfy the optimality condition.
The paper’s outline is as follows. After the prob-
83
E. Ludwig S., A. Sirignano J., Huang R. and Papanicolaou G..
A FORWARD-BACKWARD ALGORITHM FOR STOCHASTIC CONTROL PROBLEMS - Using the Stochastic Maximum Principle as an Alternative to
Dynamic Programming.
DOI: 10.5220/0003885900830089
In Proceedings of the 1st International Conference on Operations Research and Enterprise Systems (ICORES-2012), pages 83-89
ISBN: 978-989-8425-97-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

lem definition in section 2, we briefly derivethe corre-
sponding FBSDE representation for the adjoint equa-
tions and state a verification theorem in section 3. In
section 4 we discretize the time-continuous problem
and provide the numerical scheme using a Markov
chain approximation and a Newton-Raphson method
for the optimization. A brief comparison of the com-
putational costs between our method and the stan-
dard dynamic programming approach together with
first results from an application on an investment-
consumption problem are presented in section 5. The
paper concludes with some outlook to further devel-
opment.
2 PROBLEM STATEMENT
Throughout the paper we assume a given probability
space (Ω, F, P), endowed with a d-dimensional Brow-
nian motion (W
t
)
t≥0
, whose natural filtration is de-
noted by {F
t
}
t≥0
.
Consider the following problem. The dynamics of
a controlled diffusion process X
t
, which represents the
state of our system, are given by:
dX
t
= b(X
t
, π
t
)dt+σ(X
t
, π
t
)dW
t
, X
0
= x∈R
n
, (1)
and the goal is to maximize a given objective function
with finite time horizon [0, T] over admissible con-
trols
˜
π = {π
t
}
t∈[0,T]
∈ A:
J(t, x,
˜
π) := E
˜
π
t
Z
T
t
f(s, X
s
, π
s
)ds+ g(X
T
)
X
t
= x
.
(2)
Here, A is the set of all progressively F
t
-measurable
controls which takes its values π
t
in a compact set
A ⊂R
r
. If it exists, we will denote the optimal control
by:
˜
π
∗
:= argmax
˜
π∈A
J(t, x,
˜
π), ∀(t, x) ∈ [0, T] ×R
n
, (3)
and the value function by:
v(t, x) := sup
˜
π
∈A
J(t, x,
˜
π), ∀(t, x) ∈ [0, T] ×R
n
.
(4)
2.1 General Conditions
For each fixed π ∈ A, we ensure the existence of a
unique solution to the controlled forward SDE (1) by
the following assumptions:
• b(·, π), σ(·, π) are uniformly Lipschitz continuous
with respect to x:
∀π ∈ A, d|b(x
1
, π) −b(x
2
, π)|+ |σ(x
1
, π) −σ(x
2
, π)|
≤C|x
1
−x
2
|,
(5)
• b(·, π), σ(·, π) satisfy a linear growth condition
with respect to x:
∀π ∈ A, |b(x, π)|+ |σ(x, π)| ≤C(1+ |x|).
(6)
To ensure the boundedness of the objective function
(2) we further assume:
• f(t,·,π),g(·) satisfy a quadratic growth condition:
∀t ∈ [0, T], ∀π ∈ A,
|g(x)|+ |f(t, x, π)| ≤C(1+ |x|
2
), ∀x ∈R
n
.
(7)
Both proofscan be found in (Pham, 2009) chapter 3.2.
For further proceedings we assume also that:
• b, σ, f, g are twice continuously differentiable
with respect to x and π:
∀t ∈ [0, T], (b, σ, f, g)(t, ·, ·) ∈C
1,2
(R
n
, A),
(8)
• f, g are uniformly concave with respect to x and
π.
To be explicit, we use a Markov Chain approxima-
tion in section 4.1. In order to calculate the Brown-
ian increments for this Markov chain approximation
in (36), σ needs to be invertible. This also means that
d = n. Otherwise, we can use Quantization methods
or Monte Carlo simulations to calculate expectations
instead. This would make no difference to the general
scheme.
3 THE STOCHASTIC MAXIMUM
PRINCIPLE
3.1 Derivation of the FBSDE
Following (Pham, 2009), let us suppose there exists
a unique solution v ∈ C
1,3
([0, T) ×R
n
) ∩C
0
([0, T] ×
R
n
) to (4) and an optimal control
˜
π
∗
∈ A described in
(3) with associated controlled diffusion
ˆ
X
t
satisfying
(1).
The adjoint equations can be derived in two basic
steps, namely 1) derive the HJB equation at the opti-
mal control with respect to x:
∂
x
∂
t
v(t,
ˆ
X
t
) + G(t,
ˆ
X
t
, π
∗
t
, ∇
x
v(t,
ˆ
X
t
), ∇
2
x
v(t,
ˆ
X
t
))
= 0,
(9)
where G : [0, T] ×R
n
×A ×R
n
×R
n×n
→ R is given
by:
G(t,x,π, p, M) := b(x, π)p+
1
2
tr(σσ
′
(x, π)M)
+ f(t, x, π).
(10)
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
84

2) Apply Ito’s formula to ∇
x
v(t,
ˆ
X
t
) and plug in the
above relation (9). After a few calculations, the ad-
joint equations come out as:
−d ∇
x
v(t,
ˆ
X
t
) =
∇
x
H(t,
ˆ
X
t
, π
∗
t
, ∇
x
v(t,
ˆ
X
t
), ∇
2
x
v(t,
ˆ
X
t
)σ(
ˆ
X
t
, π
∗
t
))dt
−∇
2
x
v(t,
ˆ
X
t
)σ(
ˆ
X
t
, π
∗
t
)dW
t
,
∇
x
v(T,
ˆ
X
T
) = ∇
x
g(
ˆ
X
t
),
where the so called Hamiltonian H : [0, T] ×R
n
×A×
R
n
×R
n×d
→ R is defined by:
H(t, x, π, y, z) := b(x, π)y+ tr[σ
′
(x, π)z] + f(t, x, π).
(11)
Furthermore, since G is continuously differen-
tiable with respect to π, we get:
0 = ∂
π
G(t,
ˆ
X
t
, π
∗
t
, ∇
x
v(t,
ˆ
X
t
), ∇
2
x
v(t,
ˆ
X
t
))
= ∂
π
H(t,
ˆ
X
t
, π
∗
t
, ∇
x
v(t,
ˆ
X
t
), ∇
2
x
v(t,
ˆ
X
t
)σ(x, π)).
Assuming concavity of H with respect to π, H must
attain a maximum at π
∗
t
.
Let us summarize the above results. Under the
above assumptions and H being concave with respect
to π, the triple:
(
ˆ
X
t
,
ˆ
Y
t
,
ˆ
Z
t
) :=
ˆ
X
t
, ∇
x
v(t,
ˆ
X
t
), ∇
2
x
v(t,
ˆ
X
t
)σ(
ˆ
X
t
, π
∗
t
)
is the unique solution to the coupled FBSDE system:
X
t
= x+
R
t
0
b(X
s
, π
∗
s
)ds+
R
t
0
σ(X
s
, π
∗
s
)dW
s
,
Y
t
= ∇
x
g(X
T
) +
R
T
t
∇
x
H(s, X
s
, π
∗
s
,Y
s
, Z
s
)ds
−
R
T
t
Z
s
dW
s
,
(12)
such that the following optimality condition holds:
π
∗
t
= argmax
π
t
∈A
H(t,
ˆ
X
t
, π
t
,
ˆ
Y
t
,
ˆ
Z
t
). (13)
3.2 Verification Theorem
Theorem 1. Suppose that there exists a unique so-
lution v ∈ C
1,3
([0, T] ×R
n
, R) of the value function
(4). Let (
ˆ
X,
ˆ
Y
t
,
ˆ
Z
t
) and the control
˜
π
∗
:= {π
∗
t
}
t∈[0,T]
be
associated solutions to the FBSDE system (12) such
that the optimality condition (13) holds. Additionally
assume that g(·) and H(t, ˙,·,
ˆ
Y
t
,
ˆ
Z
t
) are uniformly con-
cave in (x, π). Then:
•
˜
π
∗
is the optimal control of the stochastic control
problem (4) and
ˆ
X
t
is the solution of the associated
controlled state process (1),
• (
ˆ
Y
t
,
ˆ
Z
t
) =
∇
x
v(t,
ˆ
X
t
), ∇
2
x
v(t,
ˆ
X
t
)σ(
ˆ
X
t
, π
∗
t
)
Proof. The proof of the first statement is given in
(Pham, 2009) Theorem 6.5.4.
For the second step we define a function u(t,
ˆ
X
t
)
via its first derivative ∇
x
u(t,
ˆ
X
t
) :=
ˆ
Y
t
and its terminal
value u(T,
ˆ
X
T
) := g(
ˆ
X
T
) and apply Ito’s formula to
∇
x
u. Comparing the diffusion term with the backward
SDE for
ˆ
Y
t
we get
ˆ
Z
t
= ∇
2
xx
u(t,
ˆ
X
t
)σ(
ˆ
X
t
, π
∗
t
). Compar-
ing the drift terms we get a third order PDE which
is exactly the derivative of the HJB equation with re-
spect to x. Since the solution of this PDE is unique,
the verification is completed by using the verification
theorem for the HJB equation.
The concavity of H is an important condition for
the connection of the optimal control problem and the
optimality condition for the FBSDE. This condition
mainly specifies the problem class for applications.
Recall that we already assumed f, g to be concave in
section 2.1.
4 A NUMERICAL SCHEME FOR
SOLVING THE FBSDE
Let us state the complete (coupled) FBSDE problem
one more time:
X
t
= X
0
+
R
t
0
b(X
s
, π
∗
s
)ds+
R
t
0
σ(X
s
, π
∗
s
)dW
s
,
Y
t
= Y
T
+
R
T
t
∇
x
H(s, X
s
, π
∗
s
,Y
s
, Z
s
)ds−
R
T
t
Z
s
dW
s
,
π
∗
t
= argmax
π
t
∈A
H(t, X
t
, π
t
,Y
t
, Z
t
),
(14)
where X
0
= x and Y
T
= ∇
x
g(X
T
).
4.1 The Discrete Problem
Following (Kushner and Dupuis, 1992), let us define
a fixed, scalar approximation parameter h > 0. In the
following, the superscript h denotes the dependency
on this approximation parameter. Let ∆t
h
k
> 0, for k =
0, ..., N −1, N < ∞, discretize the time interval [0, T]
by defining:
t
0
:= 0, t
1
:= ∆t
h
0
, t
k
:=
k−1
∑
i=0
∆t
h
i
, t
N
:= T.
Suppose that ∆t
h
k
→ 0, as h →0. Let:
C
k
:=
(ξ
j
)
j∈I
k
, I
k
⊂ N
⊂ R
n
, ∀k = 0..N, (15)
be a spatial grid satisfying C
j
⊂ C
i
, for all
j < i. Furthermore, we denote the set of ad-
missible, piecewise constant controls by A
h
=
{
˜
π ∈ A |π
t
is constant over [t
k
,t
k+1
), ∀k ≤N −1}.
To calculate the propagation of the state process
from time t
k
to t
k+1
, we choose the Markov chain
approximation method here. As mentioned above,
we can use different methods like Quantization. The
Markov chain is defined by its transition probabilities:
∀k = 0, ..., N −1, ∀ξ
j
∈ C
k
, ∀ξ
l
∈ C
k+1
,
P(ξ
j
, ξ
l
|π
k
(ξ
j
)) = p
jl
k
(π
k
(ξ
j
)).
(16)
A FORWARD-BACKWARD ALGORITHM FOR STOCHASTIC CONTROL PROBLEMS - Using the Stochastic
Maximum Principle as an Alternative to Dynamic Programming
85

We denote ∆ξ
k
= ξ
k+1
−ξ
k
. The discrete Markov
chain approximation ξ
k
converges to the real state
process (1) as h → 0, if the following local consis-
tency conditions hold:
E
k
∆ξ
k
= b(ξ
k
, π
k
)∆t
h
k
(ξ
k
, π
k
) + o(∆t
h
k
(ξ
k
, π
k
)),
Var
k
∆ξ
h
k
= [σσ
′
](ξ
k
, π
k
)∆t
h
k
(ξ
k
, π
k
) + o(∆t
h
k
(ξ
k
, π
k
)),
sup
k,ω
|∆ξ
k
| → 0, as h → 0,
(17)
where E
k
is the conditioned expectation given all in-
formation up to time k and Var
k
is the variance accord-
ingly. For methods to derive proper transition proba-
bilities see (Kushner and Dupuis, 1992).
For any control
˜
π
h
∈ A
h
, we define the following
approximation of the objective function (2):
J
h
(t
k
, x,
˜
π
h
) =
E
˜
π
h
k
∑
N−1
i=k
f(t
i
, ξ
i
, π
h
i
)∆t
h
i
+ g(ξ
N
)
ξ
k
= x
,
(18)
and the approximation of the value function (4) by:
V
h
k
(x) = max
˜
π
h
∈A
h
J
h
(t
k
, x,
˜
π
h
). (19)
4.2 A Controlled Forward-Backward
Algorithm
Starting from final time T going backwards, let us
suppose we have already calculated the approxima-
tions Y
h
k+1
(·), Z
h
k+1
(·) for (41). Now, let us use these
functions as natural predictors for the still unknown
Y
h
k
(·) and Z
h
k
(·) respectively. Then ∀ξ
j
∈ C
k
we cal-
culate:
π
∗
t
k
(ξ
j
) = argmax
π∈A
H(t
k
, ξ
j
, π,Y
h
k+1
(ξ
j
), Z
h
k+1
(ξ
j
)).
(20)
For notational simplicity we denote π
∗
t
k
(ξ
j
) by π
j∗
k
. If
we think of the control π
∗
k
in (41) as being a function
of t, X
t
,Y
t
, Z
t
:
π
∗
k
(t, X
t
,Y
t
, Z
t
) = argmax
π∈A
H(t
k
, X
t
, π,Y
t
, Z
t
), (21)
we can replace the control variable by this function in
the FBSDE system (41) and receive a fully coupled
FBSDE system without control.
To solve the coupled FBSDE system we make
use of existing numerical schemes. In particular, we
choose the algorithm for coupled FBSDE systems
proposed by (Delarue and Menozzi, 2006) using the
pre-calculated controls π
j∗
k
(20). The algorithm then
reads as follows:
V
h
k
(ξ
j
) = f(t
k
, ξ
j
, π
j∗
k
)∆t
h
k
+
∑
ξ
l
∈C
k+1
p
jl
k
(π
j∗
k
)V
h
k+1
(ξ
l
),
(22)
Y
h
k
(ξ
j
) = ∇
x
H(t
k
, ξ
j
, π
j∗
k
,Y
h
k+1
(ξ
j
), Z
h
k+1
(ξ
j
))∆t
h
k
+
∑
ξ
l
∈C
k+1
p
jl
k
(π
j∗
k
)Y
h
k+1
(ξ
l
),
(23)
Z
h
k
(ξ
j
) =
1
∆t
h
k
∑
ξ
l
∈C
k+1
p
jl
k
(π
j∗
k
)Y
h
k+1
(ξ
l
)∆W
jl
k
, (24)
where ∆W
jl
k
is calculated via the Euler relationship:
∆W
jl
k
= σ
−1
(ξ
j
, π
j∗
k
)(ξ
l
−ξ
j
−b(ξ
j
, π
j∗
k
)∆t
h
k
). (25)
The main contribution in our paper is the explicit
pre-calculation of π
∗
via (20). This is the essential
step in our scheme to solve an optimal control prob-
lem through a FBSDE representation. The signifi-
cance is that the optimization is performed externally
from the backward calculations for V
t
,Y
t
, Z
t
in (22),
(23), (24) and does not include the calculation of ex-
pectations. This will be outlined more precisely in the
following sections.
4.3 Optimization
At first appearance, the difference of the above
method to dynamic programming is that in the for-
mer method the optimization does not have to be per-
formed over an expectation operator. Instead, opti-
mization is performed over a known explicit function
in (20) where H is given by:
b(ξ
j
, π)Y
j
k+1
+ tr[σ
′
(ξ
j
, π)Z
j
k+1
] + f(t
k
, ξ
j
, π), (26)
where Y
j
k+1
:= Y
h
k+1
(ξ
j
). To be explicit, we consider
the Newton method in a line search algorithm, see
(Nocedal and Wright, 2006) for details. For fixed
points in space and time k, j we guess a starting point
π
0
∈ A and perform the following iteration:
π
i+1
= π
i
+ p
i
, for i = 1, .., m. (27)
A careful reader might notice that the step length is
1 here, which is enough in Newton’s method to hold
the Wolf conditions. In the exact Newton method, the
search directions p
i
∈R
r
are calculated by solving the
linear system:
∇
2
π
H(π
i
)p
i
= ∇
π
H(π
i
). (28)
Since H is smooth enough and the Hessian ∇
2
π
H(π
i
) is
positive definite - see above assumptions - the method
converges to a local minimum and the rate of conver-
gence of {π
i
} is quadratic. For a proof see (Nocedal
and Wright, 2006), Theorem 3.2 and Theorem 3.5.
In detail, to solve the optimization in (20) for one
point (t
k
, ξ
j
) we denote:
H(π) := −H(t
k
, ξ
j
, π,Y
h
k+1
(ξ
j
), Z
h
k+1
(ξ
j
)) =
−b(ξ
j
, π)Y
j
k+1
−tr[σ
′
(ξ
j
, π)Z
j
k+1
] − f(t
k
, ξ
j
, π),
(29)
and calculate:
H
π
= −b
π
Y
h
k+1
−
∑
i, j
σ
ij
π
Z
ij
k+1
− f
π
,
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
86

H
ππ
= −b
ππ
Y
h
k+1
−
∑
i, j
σ
ij
ππ
Z
ij
k+1
− f
ππ
,
where we denote the gradients for all functions g =
b, σ, f, F by g
π
= ∇
π
g(π) and the Hessians by g
ππ
accordingly. Note that b
π
, b
ππ
, σ
ij
π
, σ
ij
ππ
, f
π
, f
ππ
are
known continuous functions, given by the problem
definition. Then we solve the system:
H
ππ
(π
i
)p
i
= H
π
(π
i
),
and repeat this procedure until the error is smaller
than a certain specified ε
h
. If b, σ, f are too complex
to derive the first or second derivatives by hand, one
can use methods of ’automatic differentiation’ to cal-
culate them. An introduction into these methods can
be found for example in (Nocedal and Wright, 2006).
4.4 Full Algorithm
Recall that the the space grid at time point k is
indexed by I
k
in (15) and G is defined by (10).
Therefore, the full algorithm reads as follows:
∀j ∈ I
N
,
π
j∗
N
= argmax
π∈A
G(T, ξ
j
, π, ∇
x
g(ξ
j
), ∇
2
xx
g(ξ
j
)), (30)
V
h
N
(ξ
j
) = g(ξ
j
), Y
h
N
= ∇
x
g(ξ
j
),
Z
h
N
= ∇
2
g(ξ
j
)σ(ξ
j
, π
j∗
N
).
(31)
∀k = N −1..0,
∀j ∈ I
k
,
set π
j0
k
= π
j∗
k−1
. For i = 1..i
max
solve:
H
ππ
(π
ji
k
)p
i
= H
π
(π
ji
k
),
π
j,i+1
k
= π
ji
k
+ p
i
,
(32)
until ||p
i
|| < cε
h
. Set π
j∗
k
= π
j,i+1
k
.
V
h
k
(ξ
j
) = f(t
k
, ξ
j
, π
j∗
k
)∆t
h
k
+
∑
ξ
l
∈C
k+1
p
jl
k
(π
j∗
k
)V
h
k+1
(ξ
l
),
(33)
Y
h
k
(ξ
j
) = ∇
x
H(t
k
, ξ
j
, π
j∗
k
,Y
h
k+1
(ξ
j
), Z
h
k+1
(ξ
j
))∆t
h
k
+
∑
ξ
l
∈C
k+1
p
jl
k
(π
j∗
k
)Y
h
k+1
(ξ
l
),
(34)
Z
h
k
(ξ
j
) =
1
∆t
h
k
∑
ξ
l
∈C
k+1
p
jl
k
(π
j∗
k
)Y
h
k+1
(ξ
l
)∆W
jl
k
, (35)
where ∆W
jl
k
is calculated via the Euler relationship:
∆W
jl
k
= σ
−1
(ξ
j
, π
j∗
k
)(ξ
l
−ξ
j
−b(ξ
j
, π
j∗
k
)∆t
h
k
). (36)
4.5 Known Convergence Results
For a specific subclass of stochastic control problems,
the convergence of the proposed FBSDE scheme can
be rigorously proved. Suppose that only the drift is
controlled, i.e. σ(x, ·) = σ(x). We also drop the time-
dependence in the coefficients. Furthermore, suppose
that
• σσ
′
is positive definite,
• ∇
x
H(x, π
∗
(x, y, z), y, z) and ∇
x
g(x) are Lipschitz
continuous in x,
• ∇
x
g ∈ C
2+α
(R
r
), for α > 0, and its norm in
bounded.
Note that H = by+ tr[σ
′
z] + f, is linear and Lipschitz
continuous in y, z by definition.
Also remember that we have written the optimal
control variable π
∗
as a function of the state variables
x, y, z. Then, according to (Delarue and Menozzi,
2006), the numerical FBSDE scheme converges. We
remark that a general proof of convergence for con-
trolled diffusion processes, i.e. σ(x, π), would be
analogous to proving the existence and uniqueness of
a fully nonlinear PDE. Such a proof is beyond the
scope of this paper.
5 APPLICATIONS
5.1 An Investment-consumption Model
As an example, let us consider an investment-
consumption model with convex transaction costs.
Convex transaction costs preserve the problem from
the usual bang-bang control, see (Davis and Norman,
1990). It is a reasonable assumption in certain mar-
kets, e.g. scarce commodities.
Let A
t
∈ R denote the portfolio owner’s mone-
tary amount of assets and let α
t
, β
t
> 0 denote his in-
vestment and deinvestment rate at time t respectively.
Let the convex functions f
β
, f
α
∈C
2
(R, R) determine
the transaction costs, respectively. Furthermore, let
B
t
∈ R denote the portfolio owner’s bank account,
which pays a deterministic interest rate r ≥ 0. Let
the dynamics of the states be given by:
dA
t
= (µA
t
+ α
t
−β
t
)dt + σA
t
dW
t
, A
0
= a
0
,
dB
t
= (rB
t
−c
t
−α
t
+ β
t
)dt
−( f
α
(α
t
) + f
β
(β
t
))dt, B
0
= b
0
,
(37)
where µ, σ > 0. W
t
denotes a standard Brownian mo-
tion and c
t
≥ 0 denotes the portfolio owner’s con-
sumption at time t.
The goal of the risk averse portfolio owner is to
A FORWARD-BACKWARD ALGORITHM FOR STOCHASTIC CONTROL PROBLEMS - Using the Stochastic
Maximum Principle as an Alternative to Dynamic Programming
87
maximize his expected, concave utility u ∈C
2
(R, R)
from consumption over a given time horizon T:
J(t, a
0
, b
0
, α, β, c) =
E
0
h
R
T
0
e
−δt
u(c
t
)dt + e
−δT
u(A
T
+ B
T
)
a
0
, b
0
i
,
(38)
v(t, a, b) = max
(α,β,c)∈A
J(, a, b, α, β, c), (39)
where A is the set of all F
t
-measurable control strate-
gies, δ ≥ 0 denotes the owner’s impatience to con-
sume and E
0
denotes the expectation operator with
information set at time zero.
Using this problem setup, the Hamiltonian
H(t, x, y, z, α
t
, β
t
, c
t
) in (11) takes the following form:
H = [α
t
−β
t
+ µA
t
]y
A
+
+
rB
t
−c
t
−α
t
+ β
t
−( f
α
(α
t
) + f
β
(β
t
))
y
B
+(σA
t
)z
AA
+ e
−δt
u(c
t
).
(40)
For the example calculations below, we choose log-
utility and quadratic transaction costs:
u(x) = ln(x),
f
α
(a) = ca
2
, f
β
(b) = cb
2
, for c > 0.
Then, the adjoint equations become:
−dY
A
t
=
µY
A
t
+ σZ
AA
t
dt −Z
AA
t
dW
t
, Y
A
T
=
e
−δT
A
T
+B
T
−dY
B
t
= rY
B
t
dt, Y
B
T
=
e
−δT
A
T
+B
T
.
(41)
There are similar problems that have a strictly con-
cave Hamiltonian with respect to the controls. One
example is when the trading activities α, β influence
the asset drift µ(α, β), which is called feedback con-
trol.
5.2 Numerical Results
To produce the results below, we implement the nu-
merical algorithm with Matlab using parallel process-
ing on an eight core machine.
We implemented the forward-backward (FB) al-
gorithm of section 4.4 in two ways: using a
Markov chain approximation and using a Quantiza-
tion method. Since the latter method attained bet-
ter results, we present the results of this method
here. Therefore, let ∆W
i
, i = 1, ..., L denote the pre-
calculated Brownian increments and let p
i
denote
their probabilities. For simplicity, we used a log-
scaled, time-constant grid C. Then, for a fixed time
point t
k
, we calculated for each grid point (A
j
k
, B
j
k
) ∈C
its propagation A
j,i
k+1
= A
j
k
+ ∆A
j,i
t
, for each i = 1...L,
where:
∆A
i
t
= (µA
t
+ α
t
−β
t
)∆t + σA
t
p
i
√
∆t∆W
i
. (42)
In order to evaluate the function V,Y
A
,Y
B
, Z
AA
at
the points (A
j,i
k+1
, B
j
k+1
) we used a linear interpola-
tion/extrapolation.
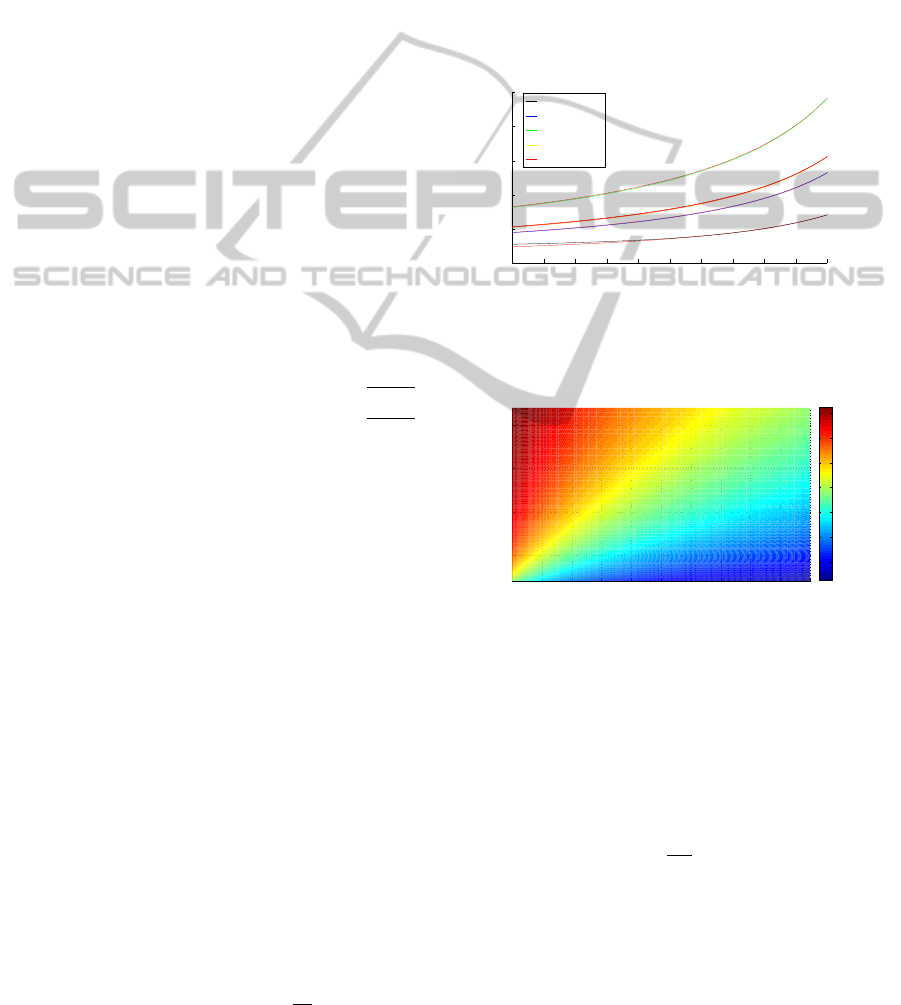
In the Figures below, we used M
2
= |I| = 100
2
space points, N = 100 time steps, L = 20 quantiza-
tion points, C ∈ [0.2, 2.2] × [0.2, 2.2] as space grid
and [t
0
, T] = [0, 2] as time interval. Moreover, we set
µ = 5%, r = 3%, δ = 2%, σ = 0.2 and c = 0.1%.
Figure 1 shows the consumption c
t
for five differ-
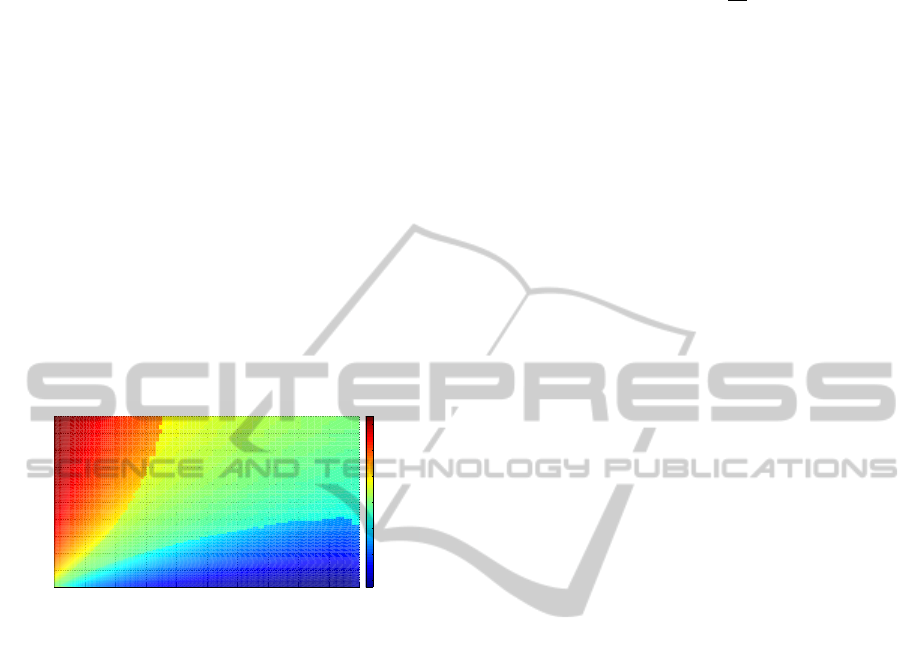
ent space points (A, B) over time. Figure 2 shows the
surface of the combined control α
∗
−β
∗
at time step
k = 98. The average calculation time for one time step
was 2.6 seconds.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.5
1
1.5
2
2.5
time
consumption
(A,B)= (0.35,0.35)
(A,B)= (0.66,0.66)
(A,B)= (1.2,1.2)
(A,B)= (1.2,0.35)
(A,B)= (0.35,1.2)
Figure 1: Optimal consumption c
∗
t
for five different space
points, using the FB algorithm. Plots of the optimal con-
sumption of the original Merton problem are added in red
color.
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2
0.5
1
1.5
2
A
B
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
Figure 2: Optimal control α
∗
−β
∗
at time t
k
= 1.96 using
the FB algorithm.
The consumption in this problem is close to the
consumption of the original Merton problem without
transaction costs. A slight irregularity can be seen
for (A, B) = (0.35, 0.35) for small t. This shows the
truncation error that propagates inside the space grid
while going backward in time. The selected point is
affected first since it is close to the lower space grid
boundary (0.2,0.2). Since
µ−r
σ
2
= 0.5, the optimal con-
trols α
∗
, β
∗
should be zero whenever A = B, as in the
original Merton problem.
To compare the results with the dynamic pro-
gramming (DP) approach, we used the Matlab op-
timization toolbox. We obtained the best results
with the provided Sequential Quadratic Program-
ming (SQP) method, which is based on a line search
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
88
quasi-Newton method. Details can be found at
http://www.mathworks.com/help/toolbox/optim/. We
needed to set L = 40 and used a spline interpolation
method to get reasonable results at all.
Figure 2 show the surface of the combined, opti-
mal control α
∗
−β
∗
at time step k = 98. The calcula-
tion time for one time step was 450 seconds.
In this example, our FB algorithm is 170 times
faster than the DP method. This is due to 1) the
smaller amount of function evaluations and 2) the dif-
ferent interpolation method needed.
Moreover, the α
∗
−β
∗
surface of the FB method
in Figure 2 is smooth, while the surface of the DP
method in Figure 3 already has become rough at time
step k = 98, indicating instability. One reason may be
that in the DP method, the optimization is performed
over the highly nonlinear value function V. In our
FB algorithm, the optimization step depends on the
functions Y
t
and Z
t
only.
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
A
B
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
Figure 3: Optimal control α
∗
−β
∗
at time t
k
= 1.96 using
the DP method.
5.3 Comparison of Computational Cost
We briefly compare our FB algorithm with the stan-
dard dynamic programming approach. Let M
n
= |I
l
|;
that is, M is the number of grid points in each dimen-
sion of space where we have n dimensions. Also,
let L be the number of calculated transition proba-
bilities (or, alternatively, the number of quantization
points/simulations if we use a Quantization/Monte
Carlo method). N is the number of time-steps and
let m be the number of iterations for the Newton-
Raphson method to reach a given level of accuracy
ε
h
. Assuming that for a given level of accuracy,
the same time grid and space grid may be used for
both algorithms, the computational cost for the dy-
namic programming approach is NM
n
Lm(1 + 2r
2
)
while the computational cost for the FB algorithm is
NM
n
[L(1+ n+ nd) + mr]. Assuming a large number
of simulations L are needed for each evaluation, the
FB algorithm is superior if:
2mr
2
> n(d + 1) + 1. (43)
It is clear that the FB algorithm has a significantly
lower computational cost if a nontrivialnumber of op-
timization iterations are required. For example, in one
dimension the FB algorithm has
3
2m
the computational
cost of the dynamic programming approach. The ad-
vantage of the FB algorithm is that we do not need
to optimize over the entire value function, which re-
quires one to recalculate the expectation in the value
function for at least m times. This is very computa-
tionally expensive. Instead, one only has to optimize
the Hamiltonian, which is a much simpler procedure.
6 CONCLUSIONS
We have proposed a complete numerical algorithm to
solve optimal control problems through the associated
FBSDE system. By complete we mean that the algo-
rithm explicitly includes the optimization step. Our
numerical approach is an alternative to standard dy-
namic programming methods. A comparison of com-
putational cost between the dynamic programming
method and the FBSDE method illustrate the advan-
tages of the FBSDE approach.
We included results of a numerical example that
commonly appears in finance and economics. These
results confirm the advantage in accuracy and compu-
tational efficiency of the FB algorithm compared to
the dynamic programming method for certain prob-
lem classes.
A next step would be to analyze the convergence
speed and the convergenceerror in theory and practice
in detail.
REFERENCES
Davis, M. and Norman, A. (1990). Portfolio selection with
transaction costs. In Mathematics of Operation Re-
search, Vol. 15, No. 4. The lnstitute of Management
Sciences/Operations Research Society of America.
Delarue, F. and Menozzi, S. (2006). A forward-backward
stochastic algorithm for quasi-linear pdes. In The An-
nals of Applied Probability, Vol. 16, No. 1, 140184.
Universite Paris.
Kushner, H. and Dupuis, P. (1992). Numerical Methods
for Stochastic Control Problems in Continuous Time.
Springer, London, 1st edition.
Nocedal, J. and Wright, S. (2006). Numerical Optimization.
Springer Series in Operation Research and Financial
Engineering, London, 2nd edition.
Peng, S. (1990). A general stochastic maximum principle
for optimal control problems. In Journal of Control
and Optimization, Vol. 28, No. 4, pp.966-979. SIAM.
Pham, H. (2009). Continuous-time stochastic control and
optimization with financial applications. In Stochas-
tic Modeling and Applied Probability 61. Springer-
Verlag Berlin Heidelberg.
A FORWARD-BACKWARD ALGORITHM FOR STOCHASTIC CONTROL PROBLEMS - Using the Stochastic
Maximum Principle as an Alternative to Dynamic Programming
89
